Изобретение относится к комбикормовой промышленности, а именно к автоматизации процессов получения комбикормов, и может быть использовано при смешивании сыпучих и вязких продуктов, например зерен злаковых, фосфотидов, жиров и др.
Известен способ автоматического управления процессом смешивания сыпучих продуктов, предусматривающий измерение расхода исходных компонентов, готовой смеси, частоты вращения рабочего вала смесителя [Щеблыкин В.В., Чабала А.П., Трофимов В.Е. Система автоматизированной стабилизации подачи продукта. Труды Всесоюзного научно-исследовательского института комбикормовой промышленности (ВНИИКП), выпуск 20, 1982].
Недостатками известного способа являются значительные удельные энергозатраты, невозможность регулирования и поддержания однородности получаемой смеси в заданных пределах и, как следствие, недостаточно равномерное распределение компонентов в получаемой смеси и значительная продолжительность процесса смешивания.
Технической задачей изобретения является повышение однородности готовой смеси и повышение эффективности процесса за счет автоматического поддержания оптимальных режимов смешивания сыпучих и жидких компонентов.
Поставленная задача достигается тем, что в предлагаемом способе автоматического управления процессом смешивания, предусматривающем измерение расхода исходных компонентов, готовой смеси, частоты вращения рабочего вала смесителя, новым является то, что сыпучие и жидкие компоненты подают в смеситель по отдельным потокам, осуществляют обогрев корпуса смесителя паром, дополнительно измеряют расход, температуру и влажность сыпучих и жидких компонентов, а также готовой смеси, расход пара на обогрев корпуса смесителя, величину крутящего момента и частоту вращения рабочего вала, по измеренным значениям расхода, температуры и влажности сыпучих и жидких компонентов устанавливают частоту вращения рабочего вала и расход пара на обогрев корпуса смесителя, по величине крутящего момента и температуре готовой смеси определяют среднюю вязкость смеси, по которой корректируют расход пара на обогрев корпуса смесителя, а по текущим значениям расхода и влажности готовой смеси корректируют производительность смесителя воздействием на частоту вращения рабочего вала, в зависимости от которой устанавливают расход сыпучих компонентов с непрерывной стабилизацией соотношения расходов сыпучих и жидких компонентов воздействием на расход последних.
На чертеже представлена схема предлагаемого способа автоматического управления процессом смешивания.
Схема содержит смеситель 1, рабочий вал с перемешивающими лопастями 2, паровую камеру 3, привод 4, линии: 5 подачи сыпучих компонентов в камеру смешивания, 6 подачи жидких компонентов, 7 подвода греющего пара, 8 отвода готовой смеси из камеры смешивания, датчики 9-12 соответственно расхода сыпучих компонентов, расхода жидких компонентов, расхода готовой смеси, расхода греющего пара, датчики 13, 14 и 15 соответственно температуры сыпучих компонентов, жидких компонентов и готовой смеси, датчики 16 и 18 соответственно влажности сыпучих компонентов и готовой смеси, датчик 17 содержания сухих веществ в жидких компонентах, датчик 19 определения крутящего момента, датчик 20 частоты вращения рабочего вала, регуляторы 21 - 24, микропроцессор 25, исполнительные механизмы 26 - 29, (а, б, в, г, д, е, ж, з, и, к, л, м - входные каналы управления, н, о, п, р - выходные каналы управления).
Способ управления осуществляется следующим образом.
По информации датчиков 9, 13, 16 и 10, 14, 17 о массовых и тепловых потоках, вносимых сыпучими и жидкими компонентами в смеситель 1 соответственно по линиям 5 и 6, микропроцессор 25 устанавливает задание локальным регуляторам 23 и 24. При этом локальный регулятор 23 вырабатывает сигнал отклонения текущего значения частоты вращения рабочего вала 2, измеряемого датчиком 20, от заданного и посредством исполнительного механизма 28 устанавливает заданный режим работы регулируемого привода 4, а следовательно, и заданную частоту вращения рабочего вала 2 смесителя 1, а локальный регулятор 24 вырабатывает сигнал отклонения текущего значения расхода пара на обогрев корпуса смесителя в линии 7, измеряемого датчиком 12, от заданного и посредством исполнительного механизма 29 устанавливает режим подачи пара в паровую рубашку 3 на обогрев корпуса смесителя 1.
Микропроцессор 25 по текущим значениям крутящего момента рабочего вала 2 и температуры готовой смеси, соответственно измеряемым с помощью датчиков 19 и 15, непрерывно определяет среднюю вязкость смеси по формулам:
где R - универсальная газовая постоянная (R = 8320 Дж/(кмоль•град); Е - энергия активации для всех молекул, заключенных в 1 моле, Дж/кмоль; А - постоянная, характеризующая данную жидкость; T - температура готовой смеси, К
где К- постоянный коэффициент; m - масса вращающегося рабочего органа, кг; N - градиент скорости ротора, с-1 [Рогов И.А., Горбатов А.В. Новые физические методы обработки мясопродуктов. Пищевая пром-сть, 1966. - 302 с.].
По рассчитанной средней вязкости смеси микропроцессор 25 осуществляет коррекцию расхода пара в паровую камеру 3 по линии 7 на обогрев корпуса смесителя 1. Причем при отклонении текущего значения средней вязкости смеси от заданного значения в сторону увеличения микропроцессор 25 корректирует задание локальному регулятору 24 на увеличение расхода пара на обогрев корпуса смесителя, а при отклонении текущего значения средней вязкости смеси от заданного значения в сторону уменьшения корректирует задание локальному регулятору 24 на уменьшение расхода пара в линии 7.
По информации датчиков 11 и 18 о текущих значениях расхода и влажности готовой смеси микропроцессор 25 контролирует фактическую производительность смесителя. Если фактическая производительность не соответствует заданному интервалу значений, то микропроцессор 25 осуществляет коррекцию расхода сыпучих компонентов в линии 5 с помощью исполнительного механизма 26 путем изменения задания локальному регулятору 21 и непрерывно стабилизирует соотношение расходов сыпучих и жидких компонентов воздействием на расход жидких компонентов, подаваемых по линии 6, с помощью исполнительного механизма 27 путем коррекции задания локальному регулятору 22.
Рассмотрим пример осуществления способа автоматического управления процессом смешивания комбикормов на смесителе Б2-КСН в условиях Воронежского экспериментального комбикормового завода.
Техническая характеристика смесителя - Б2-КСН:
Производительность, кг/ч - 1000
Мощность электропривода, кВт - 4
Продолжительность смешивания, мин - 10
Габаритные размеры, мм - 2300•750•1650
Масса, кг - 660
Удельный расход электроэнергии, кВт•ч/кг - 14,4
Пусть расход сыпучих и жидких компонентов, подаваемых в смеситель с температурой 20oС соответственно по линиям 5 и 6, составляет, например, 920 и 80 кг/ч. Начальная влажность сыпучих компонентов - 14%, а содержание сухих веществ в жидких компонентах - 17%. Информация об этих входных параметрах (расходах, температурах и влажностях) с датчиков 9, 13, 16 и 10, 14, 17 передается в макропроцессор 25, который устанавливает задание локальному регулятору 23 на частоту вращения рабочего вала 2 смесителя 1, например, 48 об/мин и локальному регулятору 24 для установления режима подачи пара в паровую рубашку 3 на обогрев корпуса смесителя 1 по линии 7, например, 62 кг/ч. При этом величина крутящего момента для этих параметров должна составлять, например, 81,25 кН•м при температуре готовой смеси, например, 42oС, что соответствует средней вязкости смеси, например, 210 Па•с.
Микропроцессор 25 непрерывно определяет текущие значения крутящего момента рабочего вала 2 и температуры готовой смеси, соответственно измеряемых с помощью датчиков 19 и 15, по которым вычисляет текущее значение средней вязкости смеси и сравнивает с заданной. По рассогласованию текущего и заданного значений средней вязкости смеси микропроцессор 25 осуществляет коррекцию расхода пара в линии 7 на обогрев корпуса смесителя 1. Причем при отклонении текущего значения средней вязкости смеси от заданного значения в сторону увеличения, например, 320 Па•с микропроцессор 25 корректирует задание локальному регулятору 24 на увеличение расхода пара на обогрев корпуса смесителя 1, например, 84 кг/ч, а при отклонении текущего значения средней вязкости смеси от заданного значения в сторону уменьшения, например, 179 Па•с корректирует задание локальному регулятору 24 на уменьшение расхода пара в линии 7, например, 46 кг/ч. По информации датчиков 11 и 18 о текущих значениях расхода и влажности готовой смеси микропроцессор 25 измеряет фактическую производительность смесителя. Если фактическая производительность не соответствует заданному значению, например, 1000 кг/ч, то микропроцессор 25 осуществляет коррекцию расхода сыпучих компонентов в линии 5 с помощью исполнительного механизма 26 путем изменения задания локальному регулятору 21 и непрерывно стабилизирует соотношение расходов сыпучих и жидких компонентов, например, 11,5:1,0 воздействием на расход жидких компонентов, подаваемых по линии 6, с помощью исполнительного механизма 27 путем коррекции задания локальному регулятору 22. При этом устанавливается новое соотношение расходов сыпучих и жидких компонентов соответственно 900 и 78,26 кг/ч с учетом начальной влажности.
Таким образом, предлагаемый способ автоматического управления процессом смешивания по сравнению с базовым имеет следующие преимущества:
- оптимизация процесса смешивания различного по своему гранулометрическому составу и физико-механическим свойствам сыпучих и жидких компонентов за счет поддержания рационального характера движения;
- расширение области применения смесителя за счет достигнутой универсализации способа автоматического управления с учетом особенностей физико-механических свойств исходных компонентов;
- получение однородных многокомпонентных смесей благодаря решению проблемы регулирования вязкости смеси за счет нагрева корпуса смесителя паром;
- более высокая точность поддержания технологических параметров за счет ограничений, накладываемых на управляемые переменные, обусловленных энергетической целесообразностью и технологическими требованиями к качеству готовой смеси;
- оптимальность коррекции режима смешивания сыпучих и жидких компонентов путем оперативного использования входной информации, позволяющей снизить инерционность управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом распылительной сушки и агломерации | 2017 |
|
RU2647745C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГИДРОТЕРМИЧЕСКОЙ ОБРАБОТКОЙ ДИСПЕРСНОГО МАТЕРИАЛА С ИМПУЛЬСНОЙ ПОДАЧЕЙ ПОТОКА ТЕПЛОНОСИТЕЛЯ | 1996 |
|
RU2118884C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА ВЛАГОТЕПЛОВОЙ ОБРАБОТКИ СЫПУЧЕГО ПРОДУКТА | 1996 |
|
RU2112402C1 |
| УПРАВЛЕНИЕ ПРОЦЕССОМ ПОЛУЧЕНИЯ СЫПУЧЕЙ ФОРМЫ ПОРОШКООБРАЗНОГО ХОЛИНХЛОРИДА ИЗ ЕГО ВОДНОГО РАСТВОРА | 2007 |
|
RU2356907C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМБИНИРОВАННЫМ ВАРОЧНО-СУШИЛЬНЫМ ПРОЦЕССОМ ОБРАБОТКИ СЫПУЧЕГО ПРОДУКТА | 1996 |
|
RU2113132C1 |
| Способ автоматического регулирования процесса сушки сыпучих материалов во вращающемся барабане | 1988 |
|
SU1603164A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПРИГОТОВЛЕНИЯ ЭКСТРУДИРОВАННОГО КОМБИКОРМА | 2006 |
|
RU2302122C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ СУШКИ | 1996 |
|
RU2117228C1 |
| Способ автоматического управления влаготепловой обработкой дисперсных материалов с использоваием переменного комбинированного конвективно-СВЧ энергоподвода | 2016 |
|
RU2640848C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛИНИЕЙ ПРОИЗВОДСТВА ЭКСТРУДИРОВАННЫХ ТЕКСТУРАТОВ | 2009 |
|
RU2412052C1 |
Способ включает измерение расхода исходных компонентов, готовой смеси, частоты вращения рабочего вала смесителя. Сыпучие и жидкие компоненты подают в смеситель по отдельным потокам. Осуществляют обогрев корпуса смесителя паром. Дополнительно измеряют расход, температуру и влажность сыпучих и жидких компонентов, а также готовой смеси, расход пара на обогрев корпуса смесителя, величину крутящего момента и частоту вращения рабочего вала. По измеренным значениям расхода, температуры и влажности сыпучих и жидких компонентов устанавливают частоту вращения рабочего вала и расход пара на обогрев корпуса смесителя. По величине крутящего момента и температуре готовой смеси определяют среднюю вязкость смеси, по которой корректируют расход пара на обогрев корпуса смесителя. По текущим значениям расхода и влажности готовой смеси корректируют производительность смесителя воздействием на частоту вращения рабочего вала, в зависимости от которой устанавливают расход сыпучих компонентов с непрерывной стабилизацией соотношения расходов сыпучих и жидких компонентов воздействием на расход последних. Повышается однородность смеси и эффективность процесса. 1 ил.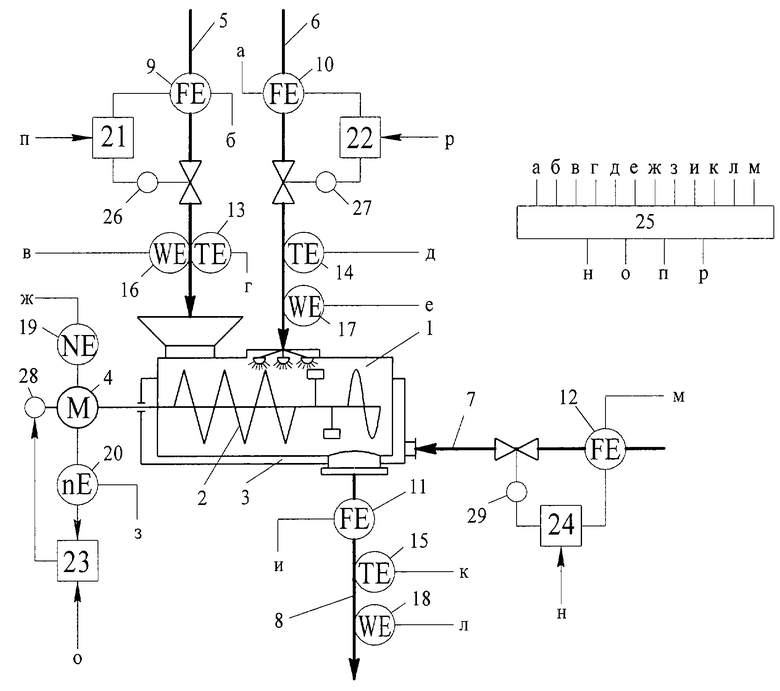
Способ автоматического управления процессом смешивания, предусматривающий измерение расхода исходных компонентов, готовой смеси, частоты вращения рабочего вала смесителя, отличающийся тем, что сыпучие и жидкие компоненты подают в смеситель по отдельным потокам, осуществляют обогрев корпуса смесителя паром, дополнительно измеряют расход, температуру и влажность сыпучих и жидких компонентов, а также готовой смеси, расход пара на обогрев корпуса смесителя, величину крутящего момента и частоту вращения рабочего вала, по измеренным значениям расхода, температуры и влажности сыпучих и жидких компонентов устанавливают частоту вращения рабочего вала и расход пара на обогрев корпуса смесителя, по величине крутящего момента и температуре готовой смеси определяют среднюю вязкость смеси, по которой корректируют расход пара на обогрев корпуса смесителя, а по текущим значениям расхода и влажности готовой смеси корректируют производительность смесителя воздействием на частоту вращения рабочего вала, в зависимости от которой устанавливают расход сыпучих компонентов с непрерывной стабилизацией соотношения расходов сыпучих и жидких компонентов воздействием на расход последних.
| Система адаптивного управления процессом гранулирования комбикормов | 1987 |
|
SU1531956A1 |
| SU 1366151 A1, 15.01.1988 | |||
| ЩЕБЛЫКИН В.В | |||
| и др | |||
| Система автоматизированной стабилизации подачи продукта | |||
| /Труды Всесоюзного научно-исследовательского института комбикормовой промышленности, вып.20, 1982 | |||
| с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| ВАЙСТИХ Г.Я | |||
| и др | |||
| Гранулирование кормов | |||
| - М.: Колос, с | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |

