Изобретение относится к области радиотехники, в частности к способу синхронизации сигналов базовых станций в системе беспроводной радиосвязи, и может быть использовано в системах радиосвязи второго, третьего и четвертого поколений для синхронизации сигналов базовых станций.
Системы беспроводной радиосвязи могут строиться как синхронно, так и асинхронно. Под синхронностью системы радиосвязи здесь понимается синхронность передачи сигналов разных базовых станций в прямом канале. Синхронное построение системы связи имеет ряд преимуществ, например:
упрощение процедуры автоматического переключения на другую базовую станцию, когда мобильная станция перемещается из соты в соту,
упрощение процедуры определения местоположения мобильных пользователей.
При синхронном построении системы беспроводной радиосвязи необходимо осуществлять синхронизацию часов всех базовых станций системы.
Возможно использование для целей синхронизации сигналов базовых станций сигнала спутниковой системы GPS, которая описана например, в книге В. Г Карташевского, С.Н. Семенова, Т.В. Фирстова. Сети подвижной связи. М., 2001, с. 59 [1] , или другой аналогичной системы. Такое решение задачи синхронизации требует наличия в составе каждой базовой станции устройства приема сигналов спутников системы GPS, что приводит к увеличению стоимости базовой станции. Кроме того, это делает зависимой работоспособность системы связи от внешней системы, что может быть нежелательно.
Существуют способы автономной синхронизации в системах радиосвязи. К таким способам относится способ, описанный в WO 99/57826: Mеthod of synchronization of a base station network, May 4, 1998, Int. Cl H 04 J 3/06, H 04 В 7/26 [2], который является наиболее близким к заявляемому способу синхронизации сигналов базовых станций в системе радиосвязи.
В прототипе [2] рассматривается система радиосвязи, включающая N базовых станций, I контроллеров базовых станций и центр определения местоположения мобильных пользователей.
Все базовые станции системы радиосвязи предлагается разбить на группы, например, таким образом, что в одну группу входят базовые станции, соединенные с одним контроллером базовых станций. Тогда количество таких групп будет равно количеству контроллеров базовых станций в системе радиосвязи.
В каждой группе базовых станций выбирают одну базовую станцию и определяют ее как опорную базовую станцию данной группы базовых станций. Особенность опорной базовой станции группы состоит в том, что время всех базовых станций группы корректируют по времени опорной базовой станции этой группы.
Одну опорную базовую станцию определяют как эталонную базовую станцию системы радиосвязи, а соответствующую ей группу - как эталонную группу базовых станций. Особенность эталонной группы состоит в том, что время всех групп базовых станций корректируют по времени эталонной группы базовых станций.
Предлагается установить измерительные устройства, таким образом, что каждое измерительное устройство осуществляет измерение взаимного временного рассогласования сигналов не менее одной пары базовых станций, при этом сигнал любой базовой станции принимается не менее чем одним измерительным устройством.
Часть измерительных устройств принимает сигналы базовых станций одинаковых групп базовых станций, а часть измерительных устройств - сигналы базовых станций разных групп.
Поэтому L измерительных устройств разбивают на I+1 группу. В i-ую группу измерительных устройств, где i принимает значения от 1 до I, входят измерительные устройства, измеряющие взаимные временные рассогласования сигналов базовых станций i-й группы. В I+1-ую группу измерительных устройств входят измерительные устройства, измеряющие взаимные временные рассогласования сигналов базовых станций разных групп.
Синхронизацию по времени базовых станций системы радиосвязи осуществляют периодически в два этапа.
На первом этапе для каждой группы базовых станций осуществляют временную синхронизацию внутри группы базовых станций, для чего выполняют следующую последовательность действий.
Осуществляют измерение взаимных временных рассогласований сигналов базовых станций посредством измерительных устройств этой группы.
Передают измеренные взаимные временные рассогласования сигналов базовых станций на контроллер базовых станций этой группы.
Каждое измеренное взаимное временное рассогласование можно представить в виде следующей суммы:
ΔTOBS = ΔTBTS+ΔTLOS+ΔTNLOS,
где ΔTOBS - измеренное взаимное временное рассогласование между сигналами базовых станций,
ΔTBTS - истинное временное рассогласование между часами базовых станций,
ΔTLOS - разница времен на прямое распространение сигналов базовых станций до измерительного устройства,
ΔTNLOS - разница времен на непрямое (с отражением) распространение сигналов базовых станций до измерительного устройства.
В данной сумме величины ΔTLOS и ΔTNLOS вносят ошибку в оценку величины ΔTBTS.
Так как географическое положение базовых станций и измерительных устройств может быть измерено, то разница времен на прямое распространение сигналов базовых станций до измерительного устройства ΔTLOS может быть учтена и сумма примет вид
ΔTOBS = ΔTBTS+ΔTNLOS.
В прототипе предложен способ уменьшения ошибок, связанных с неопределенностью величины ΔTNLOS, основанный на избыточности измерений.
Например, если есть измерения ΔTOBS,1->2, ΔTOBS,1->3 и ΔTOBS,3->2,
где ΔTOBS,1->2 - измеренное временное рассогласование между сигналами первой и второй базовых станций,
ΔTOBS,1->3 - измеренное временное рассогласование между сигналами первой и третьей базовых станций,
ΔTOBS,3->2 - измеренное временное рассогласование между сигналами третьей и второй базовых станций, то в качестве оценки временного рассогласования между сигналами первой и второй базовых станций следует брать минимальную величину из двух величин ΔTOBS,1->2 и ΔTOBS,1->3 + ΔTOBS,3->2. Это правило основано на том, что ошибка ΔTNLOS принимает только неотрицательные значения.
В прототипе предлагается применять это правило к совокупности измерений взаимных временных рассогласований данной группы базовых станций с целью изменения совокупности измерений до тех пор, пока при очередном шаге совокупность измерений не совпадет с полученной на предыдущем шаге.
Полученная таким образом совокупность измерений взаимных временных рассогласований данной группы базовых станций будет содержать не больше ошибок, связанных с непрямым распространением сигналов, чем начальная совокупность.
Таким образом, ошибки, связанные с непрямым распространением сигналов базовых станций на измерительные устройства, могут быть уменьшены. При этом чем избыточнее совокупность измерений взаимных временных рассогласований данной группы базовых станций, тем больше уменьшение ошибок.
Для каждой базовой станции находят временное рассогласование ее сигнала от сигнала опорной базовой станции этой группы по полученной совокупности измерений взаимных временных рассогласований данной группы базовых станций.
Найденные временные рассогласования сигналов базовых станций от сигнала опорной базовой станции группы передают на соответствующие базовые станции группы.
Для каждой базовой станции, кроме опорной базовой станции группы, осуществляют коррекцию ее времени в соответствии с найденным временным рассогласованием ее сигнала от сигнала опорной базовой станции группы.
На втором этапе осуществляют временную синхронизацию всех групп базовых станций по эталонной группе базовых станций, для чего выполняют следующую последовательность действий.
Осуществляют измерение взаимных временных рассогласований сигналов базовых станций разных групп базовых станций посредством измерительных устройств I+1-й группы.
Измеренные взаимные временные рассогласования сигналов базовых станций разных групп базовых станций передают в центр определения местоположения мобильных пользователей.
Для каждой группы базовых станций находят временное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций.
Найденные временные рассогласования сигналов групп базовых станций от сигналов эталонной группы базовых станций передают на базовые станции соответствующих групп.
Для базовых станций всех групп, кроме эталонной группы базовых станций, осуществляют коррекцию их времени в соответствии с найденными временными рассогласованиями сигналов групп базовых станций от сигналов эталонной группы базовых станций.
Таким образом, способ по [2] заключается в следующем:
разбивают все базовые станции системы радиосвязи на I групп базовых станций таким образом, что каждую группу базовых станций обслуживает один контроллер базовых станций,
выбирают в каждой группе базовых станций одну базовую станцию и определяют ее как опорную базовую станцию данной группы базовых станций,
определяют одну опорную базовую станцию как эталонную базовую станцию системы радиосвязи, а соответствующую ей группу - как эталонную группу базовых станций,
устанавливают измерительные устройства, таким образом, что каждое измерительное устройство осуществляет измерение взаимного временного рассогласования сигналов не менее одной пары базовых станций, при этом сигнал любой базовой станции принимается не менее чем одним измерительным устройством,
разбивают измерительные устройства на I+1 группу таким образом, что в i-ую группу измерительных устройств, где i принимает значения от 1 до I, входят измерительные устройства, измеряющие взаимные временные рассогласования сигналов базовых станций i-й группы, а в I+1-ую группу измерительных устройств входят измерительные устройства, измеряющие взаимные временные рассогласования сигналов базовых станций разных групп,
осуществляют периодически временную синхронизацию сигналов базовых станций в два этапа, при этом на первом этапе для каждой группы базовых станций осуществляют временную синхронизацию внутри группы базовых станций, для чего:
осуществляют измерение взаимных временных рассогласований сигналов базовых станций посредством измерительных устройств этой группы,
передают измеренные взаимные временные рассогласования сигналов базовых станций на контроллер базовых станций этой группы,
изменяют совокупность измеренных взаимных временных рассогласований сигналов базовых станций этой группы, уменьшая таким образом ошибки, связанные с непрямым распространением сигналов от базовых станций до измерительных устройств,
для каждой базовой станции находят временное рассогласование ее сигнала от сигнала опорной базовой станции этой группы,
передают найденные временные рассогласования сигналов базовых станций от сигнала опорной базовой станции группы на соответствующие базовые станции группы,
для каждой базовой станции, кроме опорной базовой станции группы, осуществляют коррекцию ее времени в соответствии с найденным временным рассогласованием ее сигнала от сигнала опорной базовой станции группы,
на втором этапе осуществляют временную синхронизацию всех базовых станций системы радиосвязи, для чего:
осуществляют измерение взаимных временных рассогласований сигналов базовых станций разных групп базовых станций посредством измерительных устройств I+1-й группы,
передают измеренные взаимные временные рассогласования сигналов базовых станций разных групп базовых станций в центр определения местоположения мобильных пользователей,
для каждой группы базовых станций находят временное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций,
передают найденные временные рассогласования сигналов групп базовых станций от сигналов эталонной группы базовых станций на базовые станции соответствующих групп,
для базовых станций всех групп, кроме эталонной группы базовых станций, осуществляют коррекцию их времени в соответствии с найденными временными рассогласованиями сигналов групп базовых станций от сигналов эталонной группы базовых станций.
Способ по [2] обладает следующими существенными недостатками.
Во-первых, в [2] предусмотрена только временная синхронизация базовых станций системы радиосвязи. Вместе с тем, для удовлетворения требованиям по выделенным системе связи частотам, а также для упрощения процедуры автоматического переключения на другую базовую станцию, когда мобильная станция перемещается из соты в соту, необходимо осуществлять частотную синхронизацию базовых станций.
Во-вторых, точность временной синхронизации базовых станций во многом определяется условиями распространения сигналов базовых станций (наличием или отсутствием прямых лучей). В способе по [2] предлагается последовательность действий, направленная на уменьшение ошибок, связанных с непрямым распространением сигналов базовых станций на измерительные устройства, однако получаемая точность синхронизации может быть недостаточна, например, для целей локации.
Технический результат, на достижение которого направлен заявляемый способ, - это, во-первых, обеспечение синхронизации базовых станций системы связи по частоте, а, во-вторых, - повышение точности синхронизации базовых станций системы связи по времени.
Такой результат достигается за счет того, что в заявляемый способ синхронизации сигналов базовых станций в системе радиосвязи, в которой имеется N базовых станций, I контроллеров базовых станций, измерительные устройства и центр определения местоположения мобильных пользователей, при котором:
разбивают все базовые станции системы радиосвязи на I групп базовых станций, таким образом, что каждую группу базовых станций обслуживает один контроллер базовых станций,
выбирают в каждой группе базовых станций одну базовую станцию и определяют ее как опорную базовую станцию данной группы базовых станций,
определяют одну опорную базовую станцию как эталонную базовую станцию системы радиосвязи, а соответствующую ей группу - как эталонную группу базовых станций,
устанавливают измерительные устройства, таким образом, что каждое измерительное устройство осуществляет измерение взаимного временного рассогласования сигналов не менее одной пары базовых станций, при этом сигнал любой базовой станции принимается не менее чем одним измерительным устройством,
разбивают измерительные устройства на I+1 группу таким образом, что в i-ую группу измерительных устройств, где i принимает значения от 1 до I, входят измерительные устройства, измеряющие взаимные временные рассогласования сигналов базовых станций i-й группы, а в I+1-ую группу измерительных устройств входят измерительные устройства, измеряющие взаимные временные рассогласования сигналов базовых станций разных групп,
осуществляют периодически временную синхронизацию сигналов базовых станций в два этапа, при этом на первом этапе для каждой группы базовых станций осуществляют временную синхронизацию внутри группы базовых станций, для чего:
осуществляют измерение взаимных временных рассогласований сигналов базовых станций посредством измерительных устройств этой группы,
передают измеренные взаимные временные рассогласования сигналов базовых станций на контроллер базовых станций этой группы,
для каждой базовой станции находят временное рассогласование ее сигнала от сигнала опорной базовой станции этой группы,
передают найденные временные рассогласования сигналов базовых станций от сигнала опорной базовой станции группы на соответствующие базовые станции группы,
для каждой базовой станции, кроме опорной базовой станции группы, осуществляют коррекцию ее времени в соответствии с найденным временным рассогласованием ее сигнала от сигнала опорной базовой станции группы,
на втором этапе осуществляют временную синхронизацию всех базовых станций системы радиосвязи, для чего:
осуществляют измерение взаимных временных рассогласований сигналов базовых станций разных групп базовых станций посредством измерительных устройств I+1-й группы,
передают измеренные взаимные временные рассогласования сигналов базовых станций разных групп базовых станций в центр определения местоположения мобильных пользователей,
для каждой группы базовых станций находят временное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций,
передают найденные временные рассогласования сигналов групп базовых станций от сигналов эталонной группы базовых станций на базовые станции соответствующих групп,
для базовых станций всех групп, кроме эталонной группы базовых станций, осуществляют коррекцию их времени в соответствии с найденными временными рассогласованиями сигналов групп базовых станций от сигналов эталонной группы базовых станций, согласно изобретению вводят новую последовательность действий:
определяют на эталонной базовой станции эталонное время и частоту для данной системы радиосвязи,
каждое измерительное устройство дополнительно осуществляет измерение взаимного частотного рассогласования сигналов базовых станций,
параллельно с временной синхронизацией сигналов базовых станций осуществляют периодически частотную синхронизацию сигналов базовых станций в два этапа, при этом на первом этапе для каждой группы базовых станций осуществляют частотную синхронизацию внутри группы базовых станций, для чего:
осуществляют измерение взаимных частотных рассогласований сигналов базовых станций посредством измерительных устройств этой группы,
передают измеренные взаимные частотные рассогласования сигналов базовых станций на контроллер базовых станций этой группы,
для каждой базовой станции временное рассогласование ее сигнала от сигнала опорной базовой станции этой группы находят как взвешенную сумму измеренных взаимных временных рассогласований сигналов базовых станций этой группы,
для каждой базовой станции находят частотное рассогласование ее сигнала от сигнала опорной базовой станции этой группы, как взвешенную сумму измеренных взаимных частотных рассогласований сигналов базовых станций этой группы,
передают найденные частотные рассогласования сигналов базовых станций от сигнала опорной базовой станции группы на соответствующие базовые станции группы,
для каждой базовой станции, кроме опорной базовой станции группы, осуществляют коррекцию ее частоты в соответствии с найденным частотным рассогласованием ее сигнала от сигнала опорной базовой станции группы, на втором этапе осуществляют частотную синхронизацию всех базовых станций системы радиосвязи, для чего:
осуществляют измерение взаимных частотных рассогласований сигналов базовых станций разных групп базовых станций посредством измерительных устройств I+1-й группы,
передают измеренные взаимные частотные рассогласования сигналов базовых станций разных групп базовых станций в центр определения местоположения мобильных пользователей,
для каждой пары групп базовых станций усредняют измеренные взаимные временные и частотные рассогласования сигналов базовых станций этих групп,
для каждой группы базовых станций временное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций находят как взвешенную сумму усредненных взаимных временных рассогласований групп базовых станций,
для каждой группы базовых станций находят частотное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций как взвешенную сумму усредненных взаимных частотных рассогласований групп базовых станций,
передают найденные частотные рассогласования сигналов групп базовых станций от сигналов эталонной группы базовых станций на базовые станции соответствующих групп,
для базовых станций всех групп, кроме эталонной группы базовых станций, осуществляют коррекцию их частоты в соответствии с найденными временными и частотными рассогласованиями сигналов групп базовых станций от сигналов эталонной группы базовых станций.
Причем, например, при нахождении временного и частотного рассогласования сигнала базовой станции i-й группы базовых станций от сигнала опорной базовой станции ее группы веса определяют как элементы строки матрицы, псевдообратной к матрице i-й группы базовых станций размерностью [(Ni-1)•Ki], Ni - количество базовых станций группы, Кi - количество измерений взаимных временных и частотных рассогласований сигналов базовых станций группы, в которой каждый столбец соответствует одной из базовых станций группы, за исключением опорной базовой станции группы, а k-ая строка, где k принимает значение от 1 до Ki, соответствует k-му измерению взаимного временного и частотного рассогласования n-й и l-й базовых станций, при этом, если n-ая и l-я базовые станции не являются опорной базовой станцией группы, n-й элемент k-й строки матрицы группы равен 1, l-й элемент k-й строки матрицы группы равен -1, остальные элементы k-й строки матрицы группы равны 0, если n-ая базовая станция является опорной базовой станцией группы, l-й элемент k-й строки матрицы группы равен -1, остальные элементы k-й строки матрицы группы равны 0, если l-ая базовая станция являются опорной базовой станцией группы, n -й элемент k-й строки матрицы группы равен 1, остальные элементы k-й строки матрицы группы равны 0.
При нахождении временного и частотного рассогласования сигналов группы базовых станций от сигналов эталонной группы базовых станций веса определяют как элементы строки матрицы, псевдообратной к матрице совокупности групп размерностью [(I-1)•K] , К - количество усредненных измерений взаимных временных и частотных рассогласований сигналов различных групп базовых станций, в которой каждый столбец соответствует одной из групп базовых станций, за исключением эталонной группы базовых станций, а k-ая строка, где k принимает значение от 1 до K, соответствует k-му, усредненному измерению взаимного временного и частотного рассогласования n-й и l-й групп базовых станций, при этом, если n-ая и l-ые группы базовых станций не являются эталонной группой базовых станций, n-й элемент k-й строки матрицы совокупности групп равен 1, l-й элемент k-й строки матрицы совокупности групп равен -1, остальные элементы k-й строки матрицы совокупности групп равны 0, если n-ая группа базовых станций является эталонной группой базовых станций, l-й элемент k-й строки матрицы совокупности групп равен -1, остальные элементы k-й строки матрицы совокупности групп равны 0, если l-ая группа базовых станций является эталонной группой базовых станций, n-й элемент k-й строки матрицы совокупности групп равен 1, остальные элементы k-й строки матрицы совокупности групп равны 0.
Сопоставительный анализ с прототипом [2] заявляемого способа синхронизации сигналов базовых станций в системе радиосвязи показывает, что заявляемый способ отличается наличием новых существенных признаков, которые в совокупности позволяют повысить точность синхронизации сигналов базовых станций системы радиосвязи по времени и обеспечить синхронизацию сигналов базовых станций по частоте.
Отличия заявляемого способа от прототипа [2] заключаются в следующем.
Определяют на эталонной базовой станции эталонное время и частоту для данной системы радиосвязи (этот признак в прототипе [2] отсутствует).
Каждое измерительное устройство дополнительно осуществляет измерение взаимного частотного рассогласования сигналов базовых станций (этот признак в прототипе [2] отсутствует).
Параллельно с временной синхронизацией сигналов базовых станций осуществляют периодически частотную синхронизацию сигналов базовых станций в два этапа, при этом на первом этапе для каждой группы базовых станций осуществляют частотную синхронизацию внутри группы базовых станций, для чего:
осуществляют измерение взаимных частотных рассогласований сигналов базовых станций посредством измерительных устройств этой группы (этот признак в прототипе [2] отсутствует),
передают измеренные взаимные частотные рассогласования сигналов базовых станций на контроллер базовых станций этой группы (этот признак в прототипе [2] отсутствует),
для каждой базовой станции временное рассогласование ее сигнала от сигнала опорной базовой станции этой группы находят, как взвешенную сумму измеренных взаимных временных рассогласований сигналов базовых станций этой группы (такой метод нахождения временного рассогласования сигнала базовой станции от сигнала опорной базовой станции позволяет минимизировать ошибки, связанные с шумами и внутрисистемными помехами, и уменьшить ошибки, связанные с непрямым распространением сигналов, что повышает точность получаемого временного рассогласования),
для каждой базовой станции находят частотное рассогласование ее сигнала от сигнала опорной базовой станции этой группы, как взвешенную сумму измеренных взаимных частотных рассогласований сигналов базовых станций этой группы (этот признак в прототипе [2] отсутствует),
передают найденные частотные рассогласования сигналов базовых станций от сигнала опорной базовой станции группы на соответствующие базовые станции группы (этот признак в прототипе [2] отсутствует),
для каждой базовой станции, кроме опорной базовой станции группы, осуществляют коррекцию ее частоты в соответствии с найденным частотным рассогласованием ее сигнала от сигнала опорной базовой станции группы (этот признак в прототипе [2] отсутствует),
на втором этапе осуществляют частотную синхронизацию всех базовых станций системы радиосвязи, для чего:
осуществляют измерение взаимных частотных рассогласований сигналов базовых станций разных групп базовых станций посредством измерительных устройств I+1-й группы (этот признак в прототипе [2] отсутствует),
передают измеренные взаимные частотные рассогласования сигналов базовых станций разных групп базовых станций в центр определения местоположения мобильных пользователей (этот признак в прототипе [2] отсутствует),
для каждой пары групп базовых станций усредняют измеренные взаимные временные и частотные рассогласования сигналов базовых станций этих групп (этот признак в прототипе [2] отсутствует), для каждой группы базовых станций временное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций находят как взвешенную сумму усредненных взаимных временных рассогласований групп базовых станций (такой метод нахождения временного рассогласования сигналов группы базовых станций от сигналов эталонной группы базовых станций позволяет минимизировать ошибки, связанные с шумами и внутрисистемными помехами, и уменьшить ошибки, связанные с непрямым распространением сигналов, что повышает точность получаемого временного рассогласования),
для каждой группы базовых станций находят частотное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций как взвешенную сумму усредненных взаимных частотных рассогласований групп базовых станций (этот признак в прототипе [2] отсутствует),
передают найденные частотные рассогласования сигналов групп базовых станций от сигналов эталонной группы базовых станций на базовые станции соответствующих групп (этот признак в прототипе [2] отсутствует),
для базовых станций всех групп, кроме эталонной группы базовых станций, осуществляют коррекцию их частоты в соответствии с найденными временными и частотными рассогласованиями сигналов групп базовых станций от сигналов эталонной группы базовых станций (этот признак в прототипе [2] отсутствует).
Наличие новых существенных отличительных признаков, которые в совокупности обеспечивают повышение точности синхронизации по времени сигналов базовых станций и обеспечивают синхронизацию по частоте сигналов базовых станций, позволяют сделать вывод о том, что заявляемый способ отвечает критерию "новизна".
Сравнение заявляемого способа с другими техническими решениями, известными в данной области техники, не позволило выявить признаков, сходных с заявленными в отличительной части формулы изобретения.
Описание изобретения поясняется графическими материалами.
Фиг. 1 иллюстрирует разбиение базовых станций на группы, выбор эталонной базовой станции, эталонной группы базовых станций и опорных базовых станций в каждой из групп.
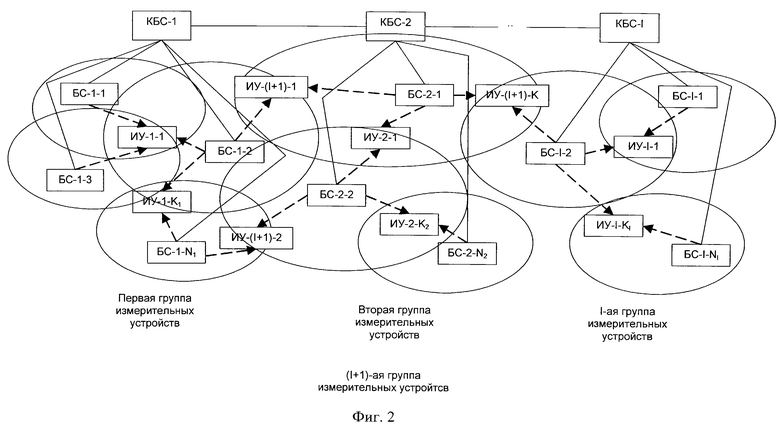
На фиг. 2 показано размещение измерительных устройств между базовыми станциями и разбиение измерительных устройств на группы.
На фиг. 3 показан пример выполнения измерительного устройства для измерения взаимного временного и частотного рассогласования сигналов двух базовых станций.
Рассмотрим работу заявляемого способа синхронизации базовых станций в системе радиосвязи, используя для этого иллюстративный материал - фиг. 1 и 2.
На фиг. 1 показано I контроллеров базовых станций КБС-1, КБС-2,..., КБС-I.
Под управлением контроллера базовых станций КБС-1 находятся базовые станции БС-1-1, БС-1-2, БС-1-3,..., БС-1-N1.
Под управлением контроллера базовых станций КБС-2 находятся базовые станции БС-2-1, БС-2-2,..., БС-2-N2.
Под управлением контроллера базовых станций КБС-I находятся базовые станции БС-1-1, БС-1-2,..., БС-1-NI.
Соответственно, количество групп равно количеству контроллеров базовых станций I системы связи; в первую группу включают базовые станции БС-1-1, БС-1-2, БС-1-3,..., БС-1-N1, находящиеся под управлением контроллера базовых станций КБС-1, во вторую группу включают базовые станции БС-2-1, БС-2-2,..., БС-2-N2, находящиеся под управлением контроллера базовых станций КБС-2, в I-ую группу включают базовые станции БС-I-1, БС-I-2,..., БС-I-NI, находящиеся под управлением контроллера базовых станций КБС-I.
Выбирают в каждой группе базовых станций одну базовую станцию и определяют ее как опорную базовую станцию данной группы базовых станций. На фиг. 1 в качестве опорной базовой станции в первой группе базовых станций выбрана базовая станция БС-1-N1, во второй группе базовых станций - базовая станция БС-2-N2, а в I-й группе базовых станций - базовая станция БС-I-NI.
Определяют одну опорную базовую станцию как эталонную базовую станцию системы радиосвязи, а соответствующую ей группу - как эталонную группу базовых станций. На фиг. 1 в качестве эталонной базовой станции определена опорная базовая станция БС-I-NI I-й группы базовых станций. Соответственно, I-ую группу базовых станций определяют как эталонную группу базовых станций.
На эталонной базовой станции БС-I-NI определяют эталонное время и частоту для данной системы радиосвязи.
На фиг. 2 показано, что к контроллерам базовых станций и базовым станциям, которые показаны на фиг.1, добавлены измерительные устройства.
Измерительное устройство ИУ-1-1 принимает сигналы базовых станций БС-1-1, БС-1-2 и БС-1-3, в частности прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований сигналов данных базовых станций.
Следует заметить, что измерительное устройство измеряет взаимные временные и частотные рассогласования сигналов всех базовых станций, сигналы которых оно может принимать. При этом по принимаемым сигналам двух базовых станций измеряется как взаимное временное, так и взаимное частотное рассогласование этих сигналов.
Измерительное устройство ИУ-1-K1 принимает сигналы базовых станций БС-1-2 и БС-1-N1, в частности прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований между ними.
Измерительные устройства ИУ-1-1,..., ИУ-1-K1 объединены в первую группу измерительных устройств.
Измерительное устройство ИУ-2-1 принимает сигналы базовых станций БС-2-1 и БС-2-2, в частности прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований между ними.
Измерительное устройство ИУ-2-K2, принимает сигналы базовых станций БС-2-2 и БС-2-N2, в частности прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований между ними.
Измерительные устройства ИУ-2-1,..., ИУ-2-K2 объединены во вторую группу измерительных устройств.
Измерительное устройство ИУ-I-1 принимает сигналы базовых станций БС-I-1 и БС-I-2, в частности прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований между ними.
Измерительное устройство ИУ-I-KI принимает сигналы базовых станций БС-I-2 и БС-I-NI, в частности прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований между ними.
Измерительные устройства ИУ-I-1,..., ИУ-I-KI объединены во вторую группу измерительных устройств.
Измерительное устройство ИУ-(I+1)-1 принимает сигналы базовых станций БС-1-2 и БС-2-1, в частности прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований между ними.
Измерительное устройство ИУ-(I+1)-2 принимает сигналы базовых станций БС-1-N1 и БС-2-2, в частности, прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований между ними.
Измерительное устройство ИУ-(I+1)-K принимает сигналы базовых станций БС-2-1 и БС-I-2, в частности прямые лучи данных сигналов, и осуществляет измерение взаимных временных и частотных рассогласований между ними.
Измерительные устройства ИУ-(I+1)-1, ИУ-(I+1)-2,..., ИУ-(I+1)-K объединены в (I+1)-ую группу измерительных устройств.
Синхронизацию сигналов базовых станций системы радиосвязи осуществляют, периодически повторяя два этапа синхронизации. На первом этапе для каждой группы базовых станций осуществляют временную и частотную синхронизацию внутри группы базовых станций. На втором этапе осуществляют временную и частотную синхронизацию групп базовых станций системы радиосвязи между собой.
На первом этапе при осуществлении временной и частотной синхронизации внутри группы базовых станций выполняют следующую последовательность действий.
Осуществляют измерение взаимных временных и частотных рассогласований сигналов базовых станций посредством измерительных устройств этой группы.
Поясним подробнее, как можно оценить временное и частотное рассогласование между сигналами двух базовых станций в системе радиосвязи.
Пусть система радиосвязи - это система радиосвязи с кодовым разделением каналов. Базовые станции системы радиосвязи передают сигналы, содержащие каналы пилот-сигнала (см. В.Г. Карташевский, С.Н. Семенов, Т.В. Фирстова. Сети подвижной связи. - М.: Эко-Трендз, 2001, с. 45 [3]), причем пилот-сигналы разных базовых станций расширяются разными псевдослучайными последовательностями (ПСП) с одинаковыми периодами, равными Р чипов псевдослучайной последовательности ПСП. Под чипом ПСП следует понимать элементарный временной интервал псевдослучайной последовательности.
На фиг. 3 показан пример выполнения измерительного устройства для измерения взаимного временного и частотного рассогласования сигналов базовых станций.
Измерительное устройство для измерения взаимного временного и частотного рассогласования сигналов двух базовых станций в соответствии с фиг. 3 содержит антенну 1, аналоговый приемник 2, блок поиска сигнала первой базовой станции 3, блок поиска сигнала второй базовой станции 4, декодер синхроканала первой базовой станции 5, декодер синхроканала второй базовой станции 6, блок вычисления взаимного временного рассогласования сигналов двух базовых станций 7, блок выделения сигнала первой базовой станции 8, блок выделения сигнала второй базовой станции 9, блок оценки набега фазы сигнала первой базовой станции 10, блок оценки набега фазы сигнала второй базовой станции 11 и блок вычисления взаимного частотного рассогласования сигналов двух базовых станций 12.
При этом вход антенны 1 является входом измерительного устройства, выход антенны 1 соединен со входом аналогового приемника 2, выход которого соединен со входами блока поиска сигнала первой базовой станции 3 и блока поиска сигнала второй базовой станции 4 и с первыми входами декодера синхроканала первой базовой станции 5, декодера синхроканала второй базовой станции 6, блока выделения сигнала первой базовой станции 8 и блока выделения сигнала второй базовой станции 9, выход блока поиска сигнала первой базовой станции 3 соединен с первым входом блока вычисления взаимного временного рассогласования сигналов двух базовых станций 7 и со вторыми входами декодера синхроканала первой базовой станции 5 и блока выделения сигнала первой базовой станции 8.
Выход декодера синхроканала первой базовой станции 5 соединен со вторым входом блока вычисления взаимного временного рассогласования сигналов двух базовых станций 7, выход блока поиска сигнала второй базовой станции 4 соединен с третьим входом блока вычисления взаимного временного рассогласования сигналов двух базовых станций 7 и со вторыми входами декодера синхроканала второй базовой станции 6 и блока выделения сигнала второй базовой станции 9.
Выход декодера синхроканала второй базовой станции 6 соединен с четвертым входом блока вычисления взаимного временного рассогласования сигналов двух базовых станций 7, выход которого является первым выходом измерительного устройства, выход блока выделения сигнала первой базовой станции 8 соединен со входом блока оценки набега фазы сигнала первой базовой станции 10, выход которого соединен с первым входом блока вычисления взаимного частотного рассогласования сигналов двух базовых станций 12.
Выход блока выделения сигнала второй базовой станции 9 соединен со входом блока оценки набега фазы сигнала второй базовой станции 11, выход которого соединен со вторым входом блока вычисления взаимного частотного рассогласования сигналов двух базовых станций 12, выход которого является вторым выходом измерительного устройства.
При этом аналоговый приемник может быть выполнен, например, как описано в патенте US 5103459 "System and Method for Generating Signal Waveforms in a CDMA Cellular Telephone System", Int. Cl5 H 04 L 27/30 [4].
Декодер синхроканала первой и второй базовых станций может быть выполнен, например, как описано в [3].
Блок выделения сигнала первой и второй базовых станций также может быть выполнен, например, как описано в [3], или, как описано в Andrew J. Viterbi, CDMA Principles of Spread Spectrum Communication. Addison-Wesley Publishing Company, 1995 [5].
Блок поиска сигнала первой и второй базовых станций может быть выполнен, например, как описано в [5]. Входной сигнал измерительного устройства, содержащий сигналы первой и второй базовых станций, поступает на вход антенны 1, с выхода которой поступает на вход аналогового приемника 2, содержащего, в том числе синтезатор частоты.
С выхода аналогового приемника 2 сигнал поступает на входы блока поиска сигнала первой базовой станции 3 и блока поиска сигнала второй базовой станции 4 и на первые входы декодера синхроканала первой базовой станции 5, декодера синхроканала второй базовой станции 6, блока выделения сигнала первой базовой станции 8 и блока выделения сигнала второй базовой станции 9.
Блок поиска сигнала первой базовой станции 3 осуществляет поиск сигнала первой базовой станции внутри области неопределенности длиной Р чипов ПСП. Допустим, что сигнал первой базовой станции был найден в позиции Р1. Значение найденной позиции сигнала первой базовой станции Р1 передают с выхода блока поиска сигнала первой базовой станции 3 на первый вход блока вычисления взаимного временного рассогласования сигналов двух базовых станций 7 и на второй вход декодера синхроканала первой базовой станции 5.
Блок поиска сигнала второй базовой станции 4 осуществляет поиск сигнала второй базовой станции внутри области неопределенности длиной Р чипов ПСП. Допустим, что сигнал второй базовой станции был найден в позиции Р2. Значение найденной позиции сигнала второй базовой станции P2, передают с выхода блока поиска сигнала второй базовой станции 4 на второй вход блока вычисления взаимного временного рассогласования сигналов двух базовых станций 7 и на второй вход декодера синхроканала второй базовой станции 6.
Декодер синхроканала первой базовой станции 5, используя значение найденной позиции сигнала первой базовой станции Р1, декодирует синхроканал первой базовой станции, получая значение времени первой базовой станции T1, соответствующее моменту передачи первого чипа ПСП первой базовой станции. Полученное значение времени первой базовой станции T1 передают с выхода декодера синхроканала первой базовой станции 5 на третий вход блока вычисления взаимного временного рассогласования сигналов двух базовых станций 7.
Декодер синхроканала второй базовой станции 6, используя значение найденной позиции сигнала второй базовой станции P2, декодирует синхроканал второй базовой станции, получая значение времени второй базовой станции T2, соответствующее моменту передачи первого чипа ПСП второй базовой станции. Полученное значение времени второй базовой станции Т2 передают с выхода декодера синхроканала второй базовой станции 6 на четвертый вход блока вычисления взаимного временного рассогласования сигналов двух базовых станций 7.
Пусть разность временных расстояний (разность расстояний, поделенная на скорость света) от первой базовой станции до измерительного устройства и от второй базовой станции до измерительного устройства равна Δt1-->>2.
Блок вычисления взаимного временного рассогласования сигналов двух базовых станций 7 вычисляет взаимное временное рассогласование сигнала первой базовой станции от сигнала второй базовой станции по формуле:
T1-T2+(P1-P2)Tch+Δt1-->>2,
где Tch - длительность одного чипа ПСП.
Таким образом, на выходе блока 7 и соответственно на первом выходе измерительного устройства получают величину взаимного временного рассогласования сигналов первой и второй базовых станций.
Блок выделения сигнала первой базовой станции 8, содержащий по меньшей мере генератор опорного сигнала для первой базовой станции и коррелятор, осуществляет выделение сигнала первой базовой станции и передает выделенный сигнал со своего выхода на вход блока оценки набега фазы сигнала первой базовой станции 10.
Блок оценки набега фазы сигнала первой базовой станции 10 осуществляет оценку набега фазы сигнала первой базовой станции относительно опорного сигнала за заданный интервал времени Т. Под набегом фазы сигнала первой базовой станции относительно сигнала синтезатора частоты за интервал времени Т следует понимать изменение разности фаз сигнала первой базовой станции и опорного сигнала за интервал времени Т. Значение оцененного набега фазы сигнала первой базовой станции Δϕ1 передают с выхода блока оценки набега фазы сигнала первой базовой станции 10 на первый вход блока вычисления взаимного частотного рассогласования сигналов базовых станций 12.
Блок выделения сигнала второй базовой станции 9, содержащий по меньшей мере генератор опорного сигнала для второй базовой станции и коррелятор, осуществляет выделение сигнала второй базовой станции и передает выделенный сигнал со своего выхода на вход блока оценки набега фазы сигнала второй базовой станции 11.
Блок оценки набега фазы сигнала второй базовой станции 11 осуществляет оценку набега фазы сигнала второй базовой станции относительно сигнала синтезатора частоты за заданный интервал времени Т. Под набегом фазы сигнала второй базовой станции относительно опорного сигнала за интервал времени Т следует понимать изменение разности фаз сигнала второй базовой станции и опорного сигнала за интервал времени Т. Значение оцененного набега фазы сигнала второй базовой станции Δϕ2 передают с выхода блока оценки набега фазы сигнала второй базовой станции 11 на второй вход блока вычисления взаимного частотного рассогласования сигналов базовых станций 12.
Блок вычисления взаимного частотного рассогласования сигналов базовых станций 12 вычисляет взаимное частотное рассогласование сигнала первой базовой станции от сигнала второй базовой станции по формуле:
(Δϕ1-Δϕ2)/T.
Таким образом, на выходе блока 12 и соответственно на втором выходе измерительного устройства получают величину взаимного частотного рассогласования сигналов первой и второй базовых станций.
После этого передают измеренные взаимные временные и частотные рассогласования сигналов базовых станций на контроллер базовых станций данной группы базовых станций.
Передачу измеренных взаимных временных и частотных рассогласований сигналов базовых станций на контроллер базовых станций данной группы осуществляют через базовые станции данной группы.
Для передачи измеренных взаимных временных и частотных рассогласований с измерительных устройств на базовые станции используют предусмотренный в системе связи радиоинтерфейс между мобильными станциями и базовыми станциями.
Для передачи измеренных взаимных временных и частотных рассогласований с базовых станций на контроллеры базовых станций используют проводные линии связи, соединяющие базовые станции с их контроллерами базовых станций.
После этого для каждой базовой станции находят временное рассогласование ее сигнала от сигнала опорной базовой станции этой группы как взвешенную сумму измеренных взаимных временных рассогласований сигналов базовых станций этой группы и находят частотное рассогласование ее сигнала от сигнала опорной базовой станции этой группы как взвешенную сумму измеренных взаимных частотных рассогласований сигналов базовых станций этой группы.
При нахождении временного и частотного рассогласования сигнала базовой станции i-й группы базовых станций от сигнала опорной базовой станции ее группы веса определяют как элементы строки матрицы, псевдообратной к матрице i-й группы базовых станций.
Веса, используемые для нахождения временного рассогласования сигнала базовой станции i-й группы базовых станций от сигнала опорной базовой станции ее группы, одинаковы с весами, используемыми для нахождения частотного рассогласования сигнала базовой станции i-й группы базовых станций от сигнала опорной базовой станции ее группы.
Матрица i-й группы базовых станций имеет размерность
[(Ni-1)•Ki],
где Ni - количество базовых станций группы,
Кi - количество измерений взаимных временных и частотных рассогласований сигналов базовых станций группы.
В матрице i-й группы базовых станций каждый столбец соответствует одной из базовых станций группы, за исключением опорной базовой станции группы, а k-ая строка, где k принимает значение от 1 до Кi соответствует k-му измерению взаимного временного и частотного рассогласования n-й и l-й базовых станций, при этом:
если n-ая и l -ая базовые станции не являются опорной базовой станцией группы, n-й элемент k-й строки матрицы группы равен 1, l-й элемент k-й строки матрицы группы равен -1, остальные элементы k-й строки матрицы группы равны 0,
если n-ая базовая станция является опорной базовой станцией группы, l-й элемент k-й строки матрицы группы равен -1, остальные элементы k-й строки матрицы группы равны 0,
если l-ая базовая станция являются опорной базовой станцией группы, n-й элемент k-й строки матрицы группы равен 1, остальные элементы k-й строки матрицы группы равны 0.
Матрица каждой группы базовых станций, а следовательно и веса, меняется только при изменении конфигурации сети радиосвязи, поэтому ее придется вычислять очень редко (при неизменной конфигурации ее придется вычислять только один раз).
Найденные временные и частотные рассогласования сигналов базовых станций от сигнала опорной базовой станции группы передают на соответствующие базовые станции группы. При этом для передачи используют проводные линии связи, соединяющие контроллеры базовых станций с их базовыми станциями.
После этого для каждой базовой станции, кроме опорной базовой станции группы, осуществляют коррекцию ее времени и частоты в соответствии с найденным временным и частотным рассогласованием ее сигнала от сигнала опорной базовой станции группы.
На втором этапе при осуществлении временной и частотной синхронизации групп базовых станций системы радиосвязи между собой выполняют следующую последовательность действий.
Осуществляют измерение взаимных временных и частотных рассогласований сигналов базовых станций разных групп базовых станций посредством измерительных устройств I+1-й группы. Измерение взаимных временных и частотных рассогласований сигналов базовых станций разных групп базовых станций осуществляют так же, как и ранее.
Передают измеренные взаимные временные и частотные рассогласования сигналов базовых станций разных групп базовых станций в центр определения местоположения мобильных пользователей.
Передачу измеренных взаимных временных и частотных рассогласований сигналов базовых станций в центр определения местоположения мобильных пользователей осуществляют через базовые станции и через контроллеры базовых станций.
Центр определения местоположения мобильных пользователей связан со всеми контроллерами базовых станций непосредственно или через другие контроллеры базовых станций проводными линиями связи, которые используют для передачи измеренных взаимных временных и частотных рассогласований сигналов базовых станций с контроллеров базовых станций в центр определения местоположения мобильных пользователей.
Для базовых станций двух групп базовых станций может проводится одно или более измерений взаимных временных и частотных рассогласований сигналов базовых станций этих групп, или не проводиться ни одного измерения.
Если для базовых станций двух групп базовых станций осуществлено более одного измерения взаимных временных и частотных рассогласований сигналов базовых станций этих групп, то измеренные взаимные временные и частотные рассогласования сигналов базовых станций этих групп усредняют.
После этого, для каждой группы базовых станций находят временное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций как взвешенную сумму усредненных взаимных временных рассогласований групп базовых станций, и находят частотное рассогласование сигналов этой группы базовых станций от сигналов эталонной группы базовых станций как взвешенную сумму усредненных взаимных частотных рассогласований групп базовых станций.
При нахождении временного и частотного рассогласования сигналов группы базовых станций от сигналов эталонной группы базовых станций веса определяют как элементы строки матрицы, псевдообратной к матрице совокупности групп.
Веса, используемые для нахождения временного рассогласования сигналов группы базовых станций от сигналов эталонной группы базовых станций, одинаковы с весами, используемыми для нахождения частотного рассогласования сигналов группы базовых станций от сигналов эталонной группы базовых станций.
Матрица совокупности групп имеет размерность
[(I-1)•K],
где К - количество усредненных измерений взаимных временных и частотных рассогласований сигналов различных групп базовых станций.
В матрице совокупности групп каждый столбец соответствует одной из групп базовых станций, за исключением эталонной группы базовых станций, а k-ая строка, где k принимает значение от 1 до K, соответствует k-му усредненному измерению взаимного временного и частотного рассогласования n-й и l-й групп базовых станций, при этом:
- если n-ая и l-ые группы базовых станций не являются эталонной группой базовых станций, n-й элемент k-й строки матрицы совокупности групп равен 1, l-й элемент k-й строки матрицы совокупности групп равен -1, остальные элементы k-й строки матрицы совокупности групп равны 0,
- если n-ая группа базовых станций является эталонной группой базовых станций, l-й элемент k-й строки матрицы совокупности групп равен -1, остальные элементы k-й строки матрицы совокупности групп равны 0,
- если l-ая группа базовых станций является эталонной группой базовых станций, n-й элемент k-й строки матрицы совокупности групп равен 1, остальные элементы k-й строки матрицы совокупности групп равны 0.
Найденные временные и частотные рассогласования сигналов групп базовых станций от сигналов эталонной группы базовых станций передают на базовые станции соответствующих групп. Передачу осуществляют через контроллеры базовых станций соответствующих групп. Для передачи найденных временных и частотных рассогласований с центра определения местоположения мобильных пользователей на контроллеры базовых станций используют проводные линии связи, соединяющие центр определения местоположения мобильных пользователей и контроллеры базовых станций.
Для базовых станций всех групп, кроме эталонной группы базовых станций, осуществляют коррекцию их времени и частоты в соответствии с найденными временными и частотными рассогласованиями сигналов групп базовых станций от сигналов эталонной группы базовых станций.
Базовые станции, контроллеры базовых станций и центр определения местоположения мобильных пользователей могут быть выполнены, например, как в прототипе [2].
Заявляемый способ синхронизации базовых станций в системе радиосвязи обладает следующими существенными преимуществами по сравнению с прототипом [2] и другими, известными в данной области техники, изобретениями.
Во-первых, заявляемый способ позволяет использовать на базовых станциях опорные генераторы меньшей стабильности и, вместе с тем, удовлетворять требованиям по излучению сигналов в соответствии с выделенной сеткой частот. Этот технический эффект достигается за счет введения в способ операций по измерению частотных рассогласований сигналов базовых станций и подстройки их опорных генераторов.
Во-вторых, в заявляемый способ введена новая последовательность операций, относящихся к совокупности измерений временных рассогласований сигналов базовых станций, которая позволяет минимизировать ошибки оценок, связанные с шумами и внутрисистемными помехами, и уменьшить ошибки, связанные с непрямым распространением сигналов базовых станций до измерительных устройств.
Перечисленные преимущества заявляемого способа позволяют обеспечить синхронизацию сигналов базовых станций в системе радиосвязи по частоте и повысить точность синхронизации базовых станций системы радиосвязи по времени.

Изобретение относится к системам подвижной связи и может использоваться для синхронизации базовых станций. Технический результат заключается в повышении точности синхронизации базовых станций системы радиосвязи по частоте и времени. Для этого измеряют взаимные частотные рассогласования сигналов базовых станций, корректируют сигналы базовых станций по сигналу эталонной базовой станции и минимизируют ошибки оценок, связанные с шумами и внутрисистемными помехами. 2 з.п. ф-лы, 3 ил.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| КАРТАШЕВСКИЙ В.Г | |||
| и др | |||
| Сети подвижной связи | |||
| - М.: Связь, 2001,с.59 | |||
| УСТРОЙСТВО ДЛЯ ДЕКОДИРОВАНИЯ ЛИНЕЙНЫХ КОДОВ | 1992 |
|
RU2035123C1 |

