Изобретение относится к области радиотехники, в частности к способу определения взаимного временного рассогласования сигналов базовых станций (БС) в системе сотовой радиосвязи, и может быть использовано, например, в системах сотовой радиосвязи третьего поколения при определении местоположения МП (МП).
БС в системах сотовой радиосвязи с кодовым разделением каналов (CDMA - Code Division Multiple Access) третьего поколения, например, в режиме частотного дуплекса (FDD - Frequency Division Duplex) в системе 3GPP (3rd Generation Partnership Project - партнерский проект по разработке систем связи третьего поколения), не синхронны между собой. Под синхронностью БС здесь понимается синхронность передачи сигналов разных БС станций в прямом канале. Поэтому возникает задача определения взаимного временного рассогласования сигналов БС.
Определение взаимного временного рассогласования сигналов БС необходимо при определении местоположения МП, а также для уменьшения времени и аппаратных затрат при начальном поиске сигналов БС мобильными станциями и для уменьшения объема хранимых данных при процедуре мягкой эстафетной передачи (процедура мягкой эстафетной передачи описана в патенте RU №2137314 [1]).
Известно техническое решение, описанное в статье "Synergies Between Satellite Navigation and Location Services of Terrestrial Mobile Communication", G. Hein, B. Eissfeller, V. Oehler, Jon O. Winkel, Institute of Geodesy and Navigation, University FAF Munich, ION GPS 2000, 19-22 September 2000, Salt Lake City, UT [2], в котором предлагается для определения взаимных временных рассогласований БС использовать измерительные устройства, принимающие сигналы БС и определяющие их взаимные временные рассогласования.
Недостатками известного технического решения являются невысокая точность определения взаимных временных рассогласований сигналов БС, связанная с непрямым многолучевым распространением сигналов от БС до измерительных устройств, а также невозможность получить взаимное временное рассогласование сигналов БС, прямое измерение для которых недоступно по каким-либо причинам.
Наиболее близким по технической сущности решением к заявляемому способу является решение, описанное в стандарте 3GPP TS 25.305 V3.7.0, 2001 12, "Stage 2 Functional Specification of UE Positioning in UTRAN" [3].
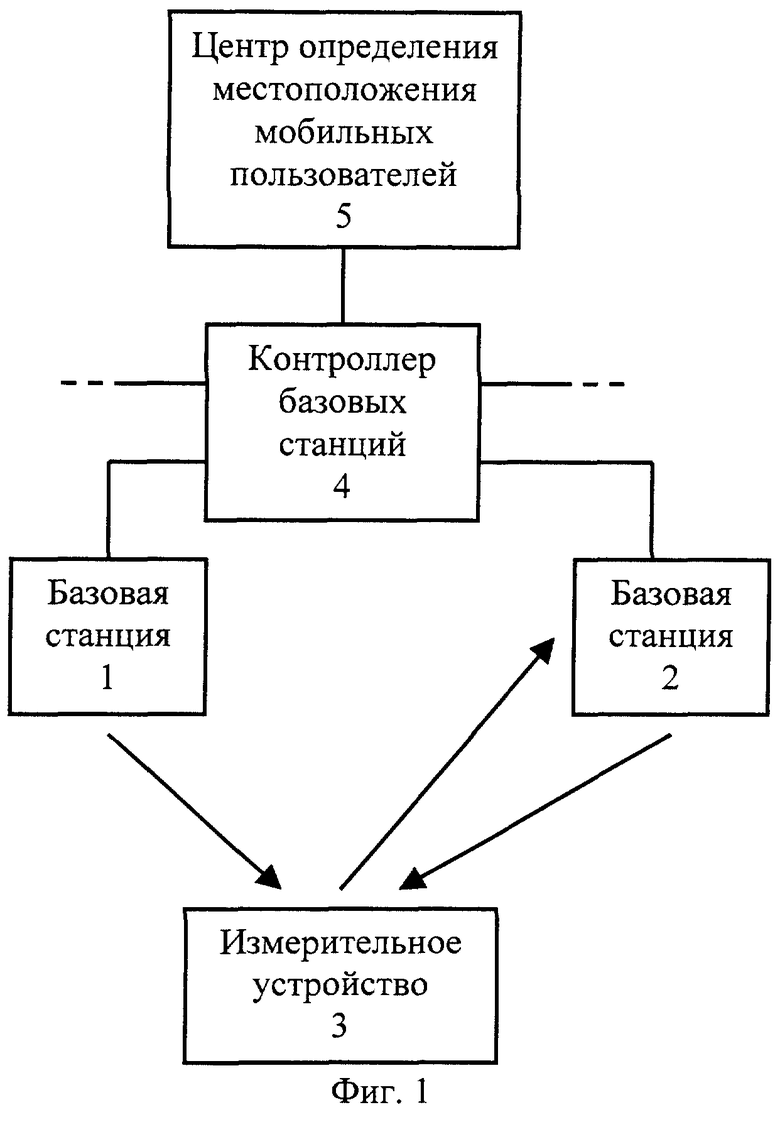
В этом техническом решении предлагается принимать сигналы БС, взаимное временное рассогласование между которыми надо определить на измерительном устройстве, расположенном на позиции с известными координатами. Для лучшего понимания осуществление способа определения временного рассогласования сигналов БС в системе сотовой радиосвязи по стандарту [3] приведено фиг.1.
На фиг.1 показаны БС 1 и 2, взаимное временное рассогласование сигналов, которые необходимо определить, измерительное устройство 3, контроллер 4 БС и центр 5 определения местоположения МП.
Осуществляют известный способ следующим образом.
На измерительном устройстве 3 принимают сигнал БС 1 и сигнал БС 2 и осуществляют заданное число последовательных измерений их временного рассогласования.
Усредняют последовательные измерения временного рассогласования сигналов БС 1 и 2, получая усредненное измеренное временное рассогласование сигналов данных БС.
Определяют на измерительном устройстве 3 точность усредненного измеренного временного рассогласования, например, по отношению сигнал/шум сигналов БС 1 и 2. При этом, в качестве точности усредненного измеренного временного рассогласования выбирают величину, линейно связанную с ошибкой усредненного измеренного временного рассогласования относительно истинного значения временного рассогласования сигналов БС 1 и 2 при приеме на измерительном устройстве 3.
Передают усредненное измеренное временное рассогласование сигналов БС 1 и 2 и его точность с измерительного устройства 3 на БС 1 или 2 с использованием существующего в системе связи радиоинтерфейса, а с соответствующей БС - на контроллер 4 БС по проводной линии связи, соединяющей контроллер 4 БС с этой БС.
На контроллере 4 БС по усредненному измеренному временному рассогласованию сигналов БС 1 и 2 определяют взаимное временное рассогласование сигналов БС 1 и 2 с учетом известного взаимного расположения БС 1 и 2 и измерительного устройства 3.
Полученное взаимное временное рассогласование сигналов БС 1 и 2 и его точность передают с контроллера 4 БС на центр 5 определения местоположения МП для дальнейшего использования. Для передачи используют проводную линию связи, соединяющую контроллер 4 БС и центр 5 определения местоположения МП.
Таким образом, согласно описанию упомянутого известного способа определения взаимного временного рассогласования сигналов БС в системе сотовой радиосвязи, можно выделить следующие основные признаки его реализации:
осуществляют на каждом измерительном устройстве последовательные измерения временного рассогласования сигналов как минимум двух БС, сигналы которых принимают на этом измерительном устройстве, и усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование сигналов этих БС, определяют его точность;
передают усредненные измеренные временные рассогласования и их точности с каждого измерительного устройства на одну из БС, сигналы которых принимают на этом измерительном устройстве, а с нее - на контроллер БС, под управлением которого она находится;
определяют на каждом контроллере БС взаимное временное рассогласование сигналов каждой пары БС по усредненному измеренному временному рассогласованию сигналов этих БС.
Известный способ обладает следующими существенными недостатками.
Во-первых, определение взаимного временного рассогласования сигналов БС по усредненному измеренному временному рассогласованию сигналов этих БС может быть недостаточно точным.
Это связано с тем, что оценка взаимного временного рассогласования сигналов БС подвержена влиянию шумовых ошибок, внутрисистемных помех и ошибок многолучевости. При этом разность времен на прямое распространение сигналов БС до измерительного устройства можно учесть, используя известные координаты БС и измерительного устройства.
Обозначим Δt1->2 - оценка взаимного временного рассогласования сигналов пары БС, а именно сигнала первой БС пары относительно сигнала второй БС пары;  - истинное значение взаимного временного рассогласования сигналов этой пары БС.
- истинное значение взаимного временного рассогласования сигналов этой пары БС.
Тогда разница между оценкой Δt1→2 и истинным значением  будет равна
будет равна
Δt1→2-Δ 1→2=εnoise+εmultipath,1-εmultipath,2, (1)
1→2=εnoise+εmultipath,1-εmultipath,2, (1)
где εnoise - ошибка, определяемая шумами и внутрисистемными помехами,
εmultipath,1 - ошибка многолучевости первой БС, равная разности между реальным временем на распространение сигнала первой БС до измерительного устройства и известным временем на прямое распространение ее сигнала до измерительного устройства,
εmultipath,2 - ошибка многолучевости второй БС, равная разности между реальным временем на распространение сигнала второй БС до измерительного устройства и известным временем на прямое распространение ее сигнала до измерительного устройства.
Усреднение оценки взаимного временного рассогласования Δt1→2 сигналов первой и второй БС на измерительном устройстве приводит к уменьшению величины шумовой ошибки εnoise. Разность ошибок многолучевости εmultipath,1 - εmultipath,2 остается при этом неизменной, так как определяется взаимным расположением первой и второй БС и измерительного устройства, а также окружающих их объектов, таких как здания, горы, холмы и т.д.
Таким образом, точность предлагаемого в прототипе способа определения взаимного временного рассогласования сигналов БС может быть недостаточной, например, для целей локации.
Во-вторых, возможна ситуация, когда между некоторыми двумя БС нет прямого измерения временного рассогласования их сигналов, а необходимо знать их взаимное временное рассогласование.
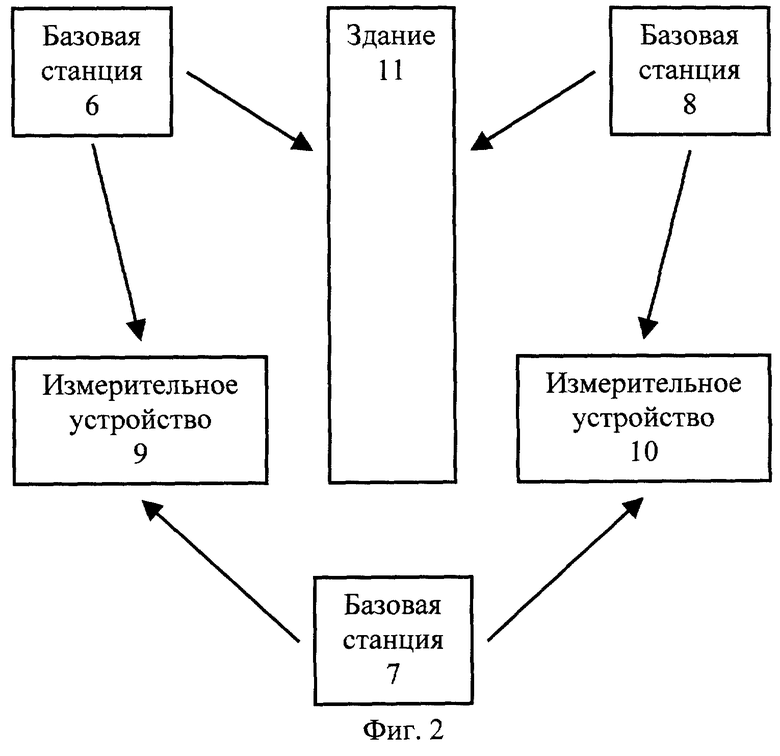
Такую ситуацию иллюстрирует фиг.2. На фиг.2 показаны БС 6, 7 и 8, измерительные устройства 9 и 10 и здание 11.
БС 6 передает первый и второй сигналы, которые представляют собой ее групповой сигнал.
БС 7 передает первый и второй сигналы, которые представляют собой ее групповой сигнал.
БС 8 передает первый и второй сигналы, которые представляют собой ее групповой сигнал.
Под групповым сигналом БС сигнал, передаваемый с БС и содержащий каналы Synchronization Channel (SCH) - канал синхронизации, Common Pilot Channel (CPICH) - общий пилот-канал и Primary Common Control Physical Channel (P-CCPCH) - первичный общий служебный физический канал, а также другие каналы.
Измерительное устройство 9 принимает первые сигналы БС 6 и 7 и измеряет их временное рассогласование.
Измерительное устройство 10 принимает второй сигнал БС 7 и первый сигнал БС 8 и измеряет их временное рассогласование.
Второй сигнал БС 6 блокируется зданием 11 и не может приниматься на измерительном устройстве 10, а второй сигнал БС 8 также блокируется зданием 11 и не может приниматься на измерительном устройстве 9.
Таким образом, прямое измерение временного рассогласования сигналов БС 6 и 8 недоступно и известный способ по стандарту 3GPP не позволяет определить их взаимное временное рассогласование.
Задача, на решение которой направлен заявляемый способ, - это определение взаимного временного рассогласования сигналов любой пары БС системы радиосвязи и повышение точности определения взаимного временного рассогласования сигналов БС.
Решение поставленной задачи достигается за счет того, что в способ определения взаимного временного рассогласования сигналов БС в системе сотовой радиосвязи, при котором используют контроллеры БС, БС, измерительные устройства и центр определения местоположения МП, причем каждая БС находится под управлением одного контроллера БС, а на каждом измерительном устройстве принимают сигналы как минимум двух БС, и сигнал каждой БС принимают на, как минимум, одном измерительном устройстве, заключающийся в том, что:
осуществляют на каждом измерительном устройстве последовательные измерения временного рассогласования сигналов, как минимум, двух БС, сигналы которых принимают на этом измерительном устройстве, и усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование сигналов этих БС, определяют его точность,
передают усредненные измеренные временные рассогласования и их точности с каждого измерительного устройства на одну из БС, сигналы которых принимают на этом измерительном устройстве, а с нее - на контроллер БС, под управлением которого она находится,
согласно изобретению:
вычитают на каждом контроллере БС из усредненного измеренного временного рассогласования каждой пары БС известное значение разности задержек на прямое распространение сигналов от первой БС и второй БС этой пары до измерительного устройства, на котором было получено данное усредненное измеренное временное рассогласование, получая уточненное временное рассогласование сигналов этой пары БС,
передают все уточненные временные рассогласования сигналов БС и их точности с каждого контроллера БС в центр определения местоположения МП,
формируют для каждой пары БС множество всех возможных путей от первой БС до второй БС пары,
формируют для каждого пути из каждого сформированного множества вектор пути, перечисляющий уточненные временные рассогласования сигналов БС, которые входят в данный путь, и определяют его метрику,
для каждой пары БС из множества всех возможных векторов путей выбирают группу векторов путей, содержащую каждое из полученных уточненных временных рассогласований, причем число использований каждого из полученных уточненных временных рассогласований в выбранной группе векторов путей не должно превышать число использований этого уточненного временного рассогласования в любой другой группе векторов путей, полученной из множества всех возможных векторов путей, а значения метрик векторов путей в выбранной группе не должны превышать значений метрик векторов путей в любой другой группе векторов путей, полученной из множества всех возможных векторов путей,
формируют для каждой пары БС веса уточненных временных рассогласований сигналов БС, используя выбранную группу векторов путей и полученные точности уточненных временных рассогласований сигналов БС,
определяют взаимное временное рассогласование сигналов каждой пары БС как взвешенную сумму всех уточненных временных рассогласований сигналов БС с весами уточненных временных рассогласований сигналов БС, сформированными для данной пары БС.
Причем, например, при формировании для каждой пары БС множества всех возможных путей формируют каждый путь множества, определяя вершинами данного пути БС, первой вершиной - началом этого пути - первую БС, второй вершиной данного пути - одну из БС, соседних с БС, являющейся первой вершиной этого пути, при этом соседними БС считают такие две БС, для которых получено уточненное временное рассогласование их сигналов, n-ой вершиной данного пути - одну из БС, соседних с БС, являющейся (n-1)-ой вершиной пути, где n принимает значения от 2 до N - 1, а N - количество вершин в этом пути, последней вершиной - окончанием данного пути - вторую БС, направление прохода этого пути - от первой БС до второй БС, причем каждая БС может являться вершиной данного пути не более одного раза.
При формировании вектора пути для каждого пути из каждого сформированного множества нумеруют все уточненные временные рассогласования сигналов БС номерами от 1 до Р, где Р - число полученных уточненных временных рассогласований сигналов БС, задают длину каждого вектора пути, равной числу уточненных временных рассогласований Р, определяют p-ый элемент каждого вектора пути, где p принимает значения от 1 до Р, равным 1, если в данном пути есть ребро, соответствующее р-ому уточненному временному рассогласованию, и направление прохода данного ребра в пути совпадает с направлением р-ого уточненного временного рассогласования, где направление р-ого уточненного временного рассогласования ip-ой БС относительно jp-ой БС определяют от ip-ой
БС к jp-ой БС, равным -1, если в данном пути есть ребро, соответствующее р-ому уточненному временному рассогласованию, и направление прохода данного ребра в пути противоположно направлению р-ого уточненного временного рассогласования, в противоположном случае равным 0.
Метрику вектора пути определяют как сумму произведений модулей элементов этого вектора пути на квадрат точности уточненного временного рассогласования, соответствующего данному элементу.
При формировании для каждой пары БС весов уточненных временных рассогласований формируют матрицу корреляций между ошибками оценок взаимного временного рассогласования данной пары БС, полученных по отдельным векторам путей, используя выбранную для этой пары БС группу векторов путей и точности уточненных временных рассогласований, при этом размер матрицы корреляций равен [R×R], где R - количество векторов путей в выбранной группе, элемент матрицы корреляций с индексами r1 и r2, где r1 и r2 принимают значения от 1 до R, равен сумме произведений элементов r1-ого вектора пути на элементы r2-го вектора пути и на квадрат точности уточненного временного рассогласования, соответствующего данным элементам; формируют матрицу, обратную к сформированной матрице корреляций между ошибками оценок взаимного временного рассогласования данной пары БС; используя сформированную для этой пары БС группу векторов путей и матрицу, обратную к сформированной матрице корреляций между ошибками оценок взаимного временного рассогласования данной пары БС, формируют Р весов уточненных временных рассогласований этой пары БС таким образом, что вес р-ого уточненного временного рассогласования ap равен

где  - элемент матрицы, обратной к сформированной матрице корреляций между ошибками оценок взаимного временного рассогласования данной пары БС, с индексами r1 и r2,
- элемент матрицы, обратной к сформированной матрице корреляций между ошибками оценок взаимного временного рассогласования данной пары БС, с индексами r1 и r2,
 - р-ый элемент r1-ого вектора пути выбранной группы,
- р-ый элемент r1-ого вектора пути выбранной группы,
 - р-ый элемент r2-ого вектора пути выбранной группы.
- р-ый элемент r2-ого вектора пути выбранной группы.
Заявляемый способ определения взаимного временного рассогласования сигналов БС в системе сотовой радиосвязи имеет отличия от известных технических решений, которые в совокупности позволяют обеспечить определение взаимного временного рассогласования сигналов любой пары БС системы радиосвязи и повысить точность определения взаимного временного рассогласования сигналов БС.
Эти отличия заключаются в следующем.
Вычитают на каждом контроллере БС из усредненного измеренного временного рассогласования каждой пары БС известное значение разности задержек на прямое распространение сигналов от первой БС и второй БС этой пары до измерительного устройства, на котором было получено данное усредненное измеренное временное рассогласование, получая уточненное временное рассогласование сигналов этой пары БС.
Передают все уточненные временные рассогласования сигналов БС и их точности с каждого контроллера БС в центр определения местоположения МП.
Формируют для каждой пары БС множество всех возможных путей от первой БС до второй БС пары.
Формируют для каждого пути из каждого сформированного множества вектор пути, перечисляющий уточненные временные рассогласования сигналов БС, которые входят в данный путь, и определяют его метрику.
Для каждой пары БС из множества всех возможных векторов путей выбирают группу векторов путей, содержащую каждое из полученных уточненных временных рассогласований, причем число использований каждого из полученных уточненных временных рассогласований в выбранной группе векторов путей не должно превышать число использований этого уточненного временного рассогласования в любой другой группе векторов путей, полученной из множества всех возможных векторов путей, а значения метрик векторов путей в выбранной группе не должны превышать значений метрик векторов путей в любой другой группе векторов путей, полученной из множества всех возможных векторов путей.
Формируют для каждой пары БС веса уточненных временных рассогласований сигналов БС, используя выбранную группу векторов путей и полученные точности уточненных временных рассогласований сигналов БС.
Определяют взаимное временное рассогласование сигналов каждой пары БС как взвешенную сумму всех уточненных временных рассогласований сигналов БС с весами уточненных временных рассогласований сигналов БС, сформированными для данной пары БС.
Описание изобретения поясняется примерами выполнения и чертежами.
Фиг.1 иллюстрирует работу способа по [3].
На фиг.2 показано такое размещение БС, измерительных устройств и здания, при котором между двумя базовыми станциями отсутствует прямое измерение временного рассогласования их сигналов.
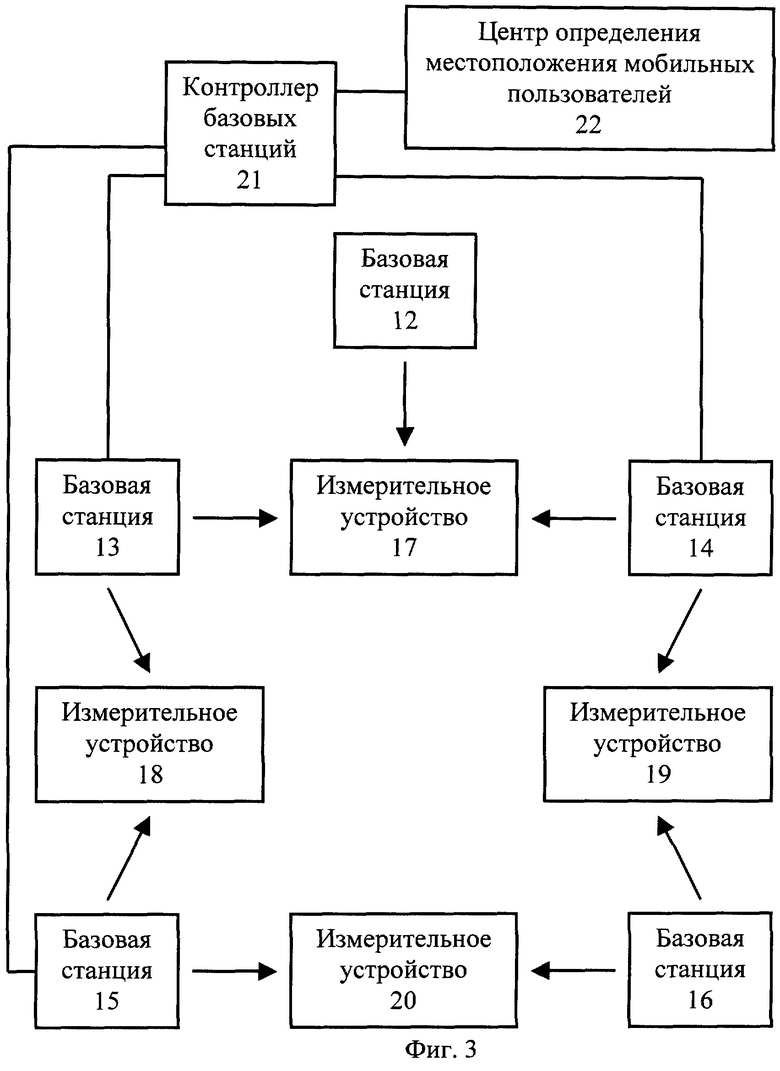
Фиг.3 иллюстрирует систему радиосвязи, на примере которой рассмотрена идея заявляемого способа.
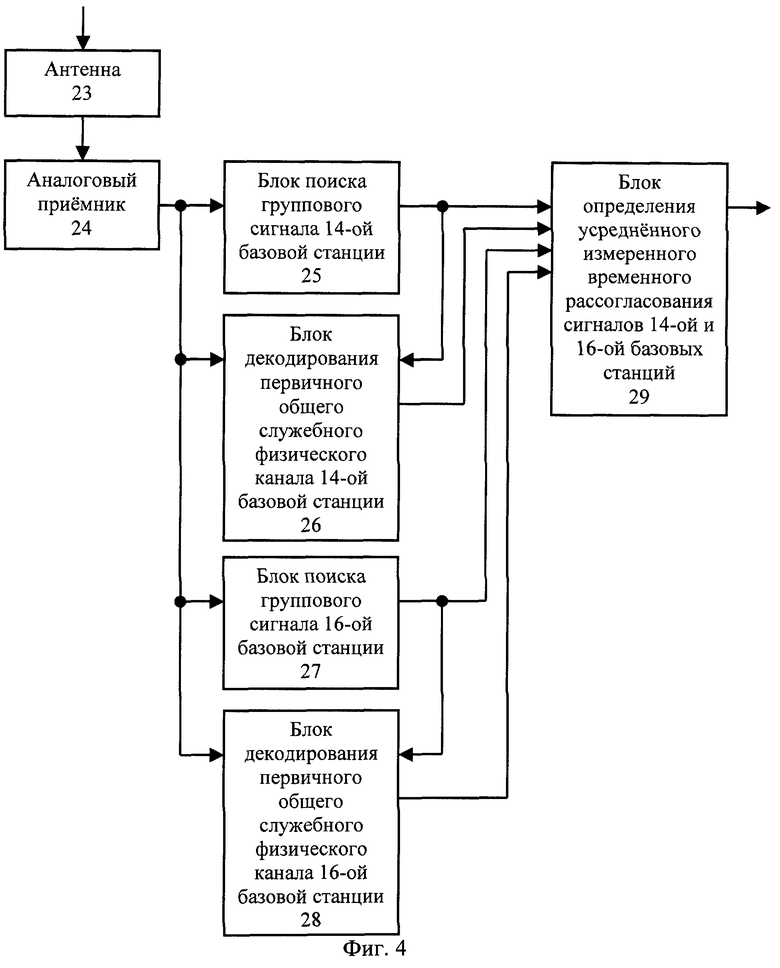
На фиг.4 показан пример выполнения измерительного устройства.
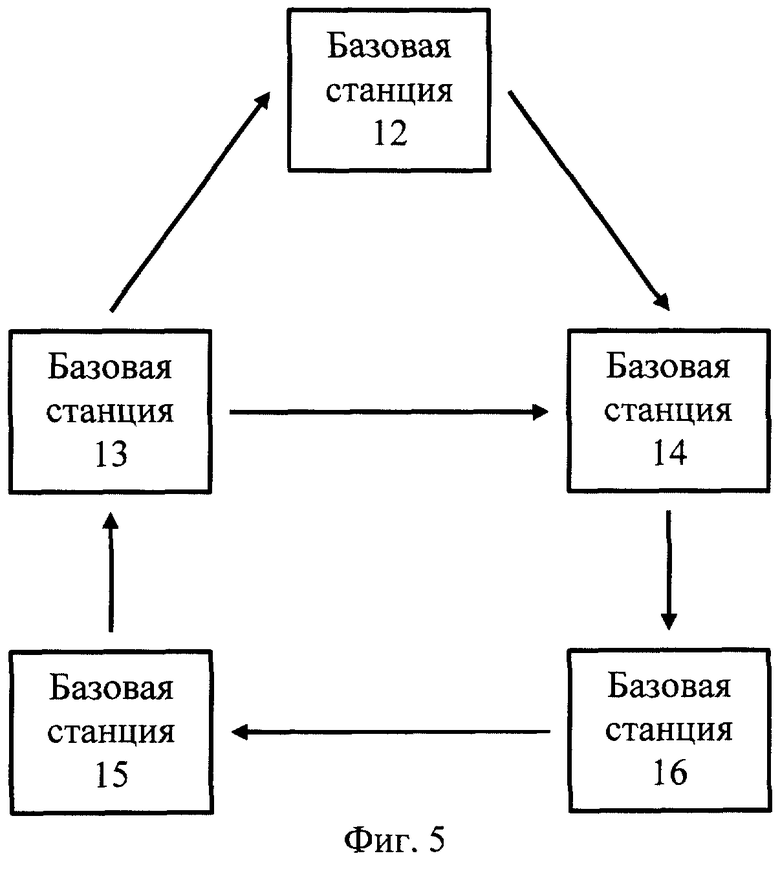
Фиг.5 иллюстрирует граф, вершинами которого являются БС, а ребрами - уточненные временные рассогласования сигналов БС.
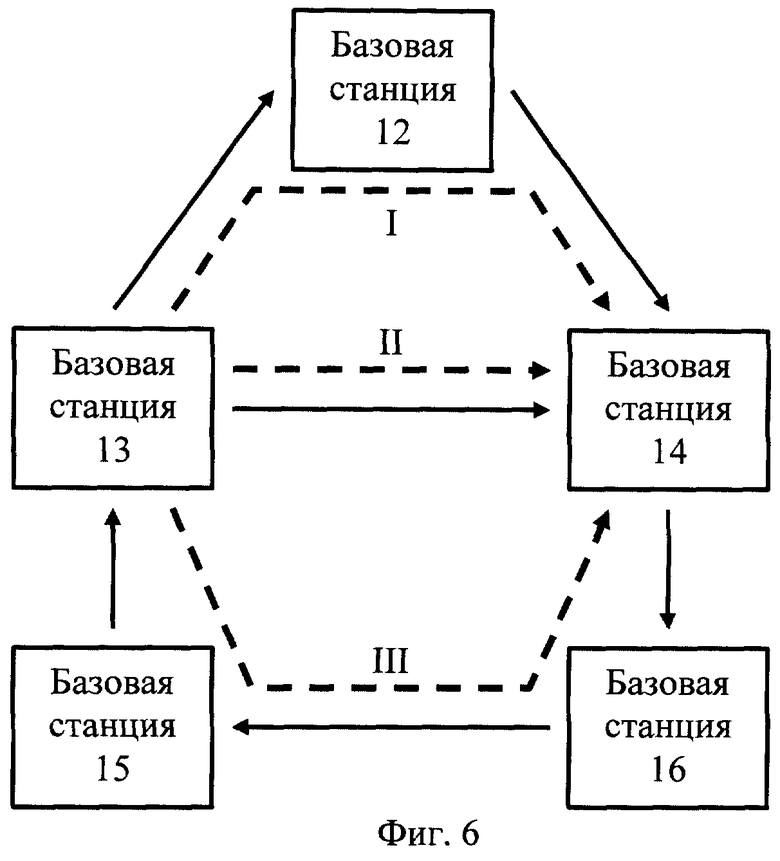
На фиг.6 показано формирование путей от первой БС до второй БС пары, для которых надо определить взаимное временное рассогласование их сигналов.
На фиг.7 приведен алгоритм общей работы способа.
На фиг.8 показан пример выполнения той части БС, которая необходима для выполнения заявляемого способа.
Фиг.9 иллюстрирует работу БС.
На фиг.10 показан пример выполнения той части контроллера БС, которая необходима для выполнения заявляемого способа.
Фиг.11 иллюстрирует работу контроллера БС.
На фиг.12 показан пример выполнения той части центра определения местоположения МП, которая необходима для осуществления заявляемого способа.
Фиг.13 иллюстрирует алгоритм работы центра определения местоположения МП.
Рассмотрим работу заявляемого способа определения взаимного временного рассогласования сигналов БС в системе сотовой радиосвязи.
Сначала поясним идею заявляемого способа на примере.
На фиг.3 показаны пять БС 12, 13, 14, 15 и 16, четыре измерительных устройства 17, 18, 19 и 20, контроллер 21 БС и центр 22 определения местоположения МП.
БС 12 передает сигнал, который представляет собой ее групповой сигнал.
БС 13 передает первый и второй сигналы, которые представляют собой ее групповой сигнал.
БС 14 передает первый и второй сигналы, которые представляют собой ее групповой сигнал.
БС 15 передает первый и второй сигналы, которые представляют собой ее групповой сигнал.
БС 16 передает первый и второй сигналы, которые представляют собой ее групповой сигнал.
Под групповым сигналом БС следует понимать сигнал, передаваемый с БС и содержащий каналы Synchronization Channel (SCH) - канал синхронизации, Common Pilot Channel (CPICH) - общий пилот-канал и Primary Common Control Physical Channel (P-CCPCH) - первичный общий служебный физический канал, а также другие каналы.
На измерительном устройстве 17 принимают сигнал БС 12 и первый сигнал БС 13, осуществляют последовательные измерения временного рассогласования первого сигнала БС 13 относительно сигнала БС 12, усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование Δt13→12,17 первого сигнала БС 13 относительно сигнала БС 12, и определяют его точность σ13→12,17.
На измерительном устройстве 17 также принимают первый сигнал БС 13 и первый сигнал БС 14, осуществляют последовательные измерения временного рассогласования первого сигнала БС 13 относительно первого сигнала БС 14, усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование Δt13→14,17 первого сигнала БС 13 относительно первого сигнала БС 14, и определяют его точность σ13→14,17.
На измерительном устройстве 17 также принимают сигнал БС 12 и первый сигнал БС 14, осуществляют последовательные измерения временного рассогласования сигнала БС 12 относительно первого сигнала БС 14, усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование Δt12→14,17 сигнала БС 12 относительно первого сигнала БС 14, и определяют его точность σ12→14,17.
На измерительном устройстве 20 принимают первые сигналы БС 15 и 16, осуществляют последовательные измерения временного рассогласования первого сигнала БС 16 относительно первого сигнала БС 15, усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование Δt16→15,20 сигнала первой БС 16 относительно первого сигнала БС 15, и определяют его точность σ16→15,20.
На измерительном устройстве 18 принимают вторые сигналы БС 13 и 15, осуществляют последовательные измерения временного рассогласования второго сигнала БС 15 относительно второго сигнала БС 13, усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование Δt15→13,18 второго сигнала БС 15 относительно второго сигнала БС 13, и определяют его точность σ15→13,18.
На измерительном устройстве 19 принимают вторые сигналы БС 14 и 16, осуществляют последовательные измерения временного рассогласования второго сигнала БС 14 относительно второго сигнала БС 16, усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование Δt14→16,19 второго сигнала БС 14 относительно второго сигнала БС 16, и определяет его точность σ14→16,19.
Рассмотрим, например, как можно получить усредненное временное рассогласование Δt14→16,19 второго сигнала БС 14 относительно второго сигнала БС 16 и определить его точность σ14→16,19.
Пусть система радиосвязи - это система 3GPP (3rd Generation Partnership Project - партнерский проект по разработке стандартов систем связи третьего поколения) в режиме частотного дуплекса. БС радиосвязи передают сигналы, содержащие каналы Synchronization Channel (SCH) - канал синхронизации, Common Pilot Channel (CPICH) - общий пилот-канал и Primary Common Control Physical Channel (P-CCPCH) - первичный общий служебный физический канал.
На фиг.4 показан пример выполнения измерительного устройства для определения усредненного измеренного временного рассогласования сигналов БС.
Измерительное устройство для определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС в соответствии с фиг.4 содержит антенну 23, аналоговый приемник 24, блок 25 поиска группового сигнала 14-ой БС, блок 26 декодирования первичного общего служебного физического канала 14-ой БС, блок 27 поиска группового сигнала 16-ой БС, блок 28 декодирования первичного общего служебного физического канала 16-ой БС и блок 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС, при этом вход антенны 23 является входом измерительного устройства, выход антенны 23 соединен с входом аналогового приемника 24, выход которого соединен со входами блока 25 поиска группового сигнала 14-ой БС и блока 27 поиска группового сигнала 16-ой БС и с первыми входами блока 26 декодирования первичного общего служебного физического канала 14-ой БС и блока 28 декодирования первичного общего служебного физического канала 16-ой БС, выход блока 25 поиска группового сигнала 14-ой БС соединен с первым входом блока 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС и со вторым входом блока 26 декодирования первичного общего служебного физического канала 14-ой БС, выход которого соединен со вторым входом блока 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС, выход блока 27 поиска группового сигнала 16-ой БС соединен с третьим входом блока 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС и со вторым входом блока 28 декодирования первичного общего служебного физического канала 16-ой БС, выход которого соединен с четвертым входом блока 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС, выход которого является выходом измерительного устройства.
При этом аналоговый приемник может быть выполнен, например, как описано в патенте US №5103459 “System and Method for Generating Signal Waveforms in a CDMA Cellular Telephone System”, [4].
Блок 25 поиска группового сигнала 14-ой БС и блок 27 поиска группового сигнала 16-ой БС могут быть выполнены, например, как описано в 3GPP TS 25.214 V3.9.0 (2001-12), Physical layer procedures (FDD), Annex C: Cell search procedure [5] и в Yi-Pin Eric Wang, and Tony Ottosson, “Cell Search in W-CDMA”, IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, VOL. 18, NO. 8, AUGUST 2000 [6].
Блок 26 декодирования первичного общего служебного физического канала 14-ой БС и блок 28 декодирования первичного общего служебного физического канала 16-ой БС могут быть выполнены, например, аналогично когерентным RAKE приемникам, описанным в Sadayuki ABETA, Mamoru SAWAHASHI, and Fumiyuki ADACHI, “Performance Comparison between Time-Multiplexed Pilot Channel and Parallel Pilot Channel for Coherent Rake Combining in DS-CDMA Mobile Radio”, IEICE Trans. Commun., Vol. E81-B, No. 7, July 1998 [7].
Входной сигнал измерительного устройства, содержащий групповые сигналы БС 14 и БС 16, поступает на вход антенны 23, с выхода которой поступает на вход аналогового приемника 24.
С выхода аналогового приемника 24 сигнал поступает на входы блока 25 поиска группового сигнала 14-ой БС и блока 27 поиска группового сигнала 16-ой БС и на первые входы блока 26 декодирования первичного общего служебного физического канала 14-ой БС и блока 28 декодирования первичного общего служебного физического канала 16-ой БС.
Блок 25 поиска группового сигнала 14-ой БС по каналу синхронизации и общему пилот-каналу осуществляет поиск группового сигнала 14-ой БС внутри области неопределенности размером 38400 чипов псевдослучайной последовательности (ПСП). Под чипом ПСП следует понимать элементарный временной интервал псевдослучайной последовательности.
Допустим, что сигнал 14-ой БС был найден в позиции Р1. Кроме того, блок 25 поиска группового сигнала 14-ой БС определяет номер первичного скремблирующего кода 14-ой БС.
Сигнал, содержащий значение найденной временной позиции P1 сигнала 14-ой БС, поступает с выхода блока 25 поиска группового сигнала 14-ой БС на первый вход блока 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС и на второй вход блока 26 декодирования первичного общего служебного физического канала 14-ой БС. Также с выхода блока 25 поиска группового сигнала 14-ой БС на второй вход блока 26 декодирования канала первичного общего служебного физического канала 14-ой БС поступает сигнал, содержащий номер первичного скремблирующего кода 14-ой БС.
Блок 26 декодирования первичного общего служебного физического канала 14-ой БС, используя полученное значение найденной временной позиции Р1 сигнала 14-ой БС и полученный номер первичного скремблирующего кода 14-ой БС, осуществляет дескремблирование, демодуляцию и декодирование первичного общего служебного физического канала, получая значение System Frame Number (SFN) - системного номера кадра 14-ой БС на момент передачи первого чипа ПСП этого кадра. Обозначим данное значение SFN 14-ой БС через SFN1.
Сигнал, содержащий найденное значение SFN1 SFN 14-ой БС, поступает с выхода блока 26 декодирования первичного общего служебного физического канала 14-ой БС на второй вход блока 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС.
Блок 27 поиска группового сигнала 16-ой БС по каналу синхронизации и общему пилот-каналу осуществляет поиск группового сигнала 16-ой БС внутри области неопределенности размером 38400 чипов ПСП. Допустим, что сигнал 16-ой БС был найден в позиции Р2. Кроме того, блок 27 поиска группового сигнала 16-ой БС определяет номер первичного скремблирующего кода 16-ой БС.
Сигнал, содержащий значение найденной временной позиции P2 сигнала 16-ой БС, поступает с выхода блока 27 поиска группового сигнала 16-ой БС на третий вход блока 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС и на второй вход блока 28 декодирования первичного общего служебного физического канала 16-ой БС. Также с выхода блока 27 поиска группового сигнала 16-ой БС на второй вход блока 28 декодирования первичного общего служебного физического канала 16-ой БС поступает сигнал, содержащий номер первичного скремблирующего кода 16-ой БС.
Блок 28 декодирования первичного общего служебного физического канала 16-ой БС, используя полученное значение найденной временной позиции P2 сигнала 16-ой БС и полученный номер первичного скремблирующего кода 16-ой БС, осуществляет дескремблирование, демодуляцию и декодирование первичного общего служебного физического канала, получая значение SFN 16-ой БС на момент передачи первого чипа ПСП этого кадра. Обозначим данное значение SFN 16-ой БС через SFN2.
Сигнал, содержащий найденное значение SFN2 SFN 16-ой БС, поступает с выхода блока 28 декодирования первичного общего служебного физического канала 16-ой БС на четвертый вход блока 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС.
Блок 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС определяет измеренное временное рассогласование сигнала БС 14 относительно сигнала БС 16 по формуле
(SFN1-SFN2)Tfr+(P1-P2)Tch, (3)
где Tfr - длительность одного кадра сигнала БС в системе 3GPP, равная 10 мc,
Тch - длительность одного чипа ПСП, равная 1/(3,84·106) с или порядка 260 нc.
Блок 29 определения усредненного измеренного временного рассогласования сигналов 14-ой и 16-ой БС может усреднять несколько полученных последовательно измеренных временных рассогласований сигнала БС 14 относительно сигнала БС 16, получая усредненное измеренное временное рассогласование сигнала БС 14 относительно сигнала БС 16. Блок 29 может быть реализован на процессоре цифровой обработки сигналов по описанному выше алгоритму.
Если все измерительные устройства осуществляют определение усредненных измеренных временных рассогласований сигналов БС аналогичными способами с одинаковым количеством усреднений, то точности всех усредненных измеренных временных рассогласований сигналов БС можно определить одинаковыми и равными, например, 100 нc. В общем случае при более сложных и более точных способах определения усредненных измеренных временных рассогласований сигналов БС или при разном количестве усреднений на разных измерительных устройствах точности разных усредненных измеренных временных рассогласований сигналов БС будут разными и будут зависеть, например, от отношений сигнал/шум сигналов, усредненное измеренное временное рассогласование которых определяется, и/или от количества усреднений.
Передают усредненные измеренные временные рассогласования Δt13→12,17, Δt13→14,17 и Δt12→14,17 и их точности σ13→12,17, σ13→14,17 и σ12→14,17 с измерительного устройства 17 на БС 13, а с нее - на контроллер 21 БС.
Передают усредненное измеренное временное рассогласование Δt15→13,18 и его точность σ15→13,18 с измерительного устройства 18 на БС 13, а с нее - на контроллер 21 БС.
Передают усредненное измеренное временное рассогласование Δt14→16,19 и его точность σ14→16,19 с измерительного устройства 19 на БС 14, а с нее - на контроллер 21 БС.
Передают усредненное измеренное временное рассогласование Δt16→15,20 и его точность σ16→15,20 с измерительного устройства 20 на БС 15, а с нее - на контроллер 21 БС.
Для передачи усредненных измеренных временных рассогласований сигналов БС и их точностей с измерительных устройств на БС используют существующий в системе сотовой связи радиоинтерфейс, а для передачи с БС на контроллер БС - проводные линии связи, соединяющие эти БС с контроллером БС.
В контроллере БС 21 вычитают из усредненного измеренного временного рассогласования Δt13→12,17 известное значение разности задержек на прямое распространение сигналов от БС 13 и от БС 12 до измерительного устройства 17, получая уточненное временное рассогласование  сигнала БС 13 относительно сигнала БС 12.
сигнала БС 13 относительно сигнала БС 12.
Обозначим через τ13→17 задержку на распространение сигнала от БС 13 до измерительного устройства 17, через τ12→17 - задержку на распространение сигнала от БС 12 до измерительного устройства 17.
Обозначим координаты БС 12 через х12, y12, z12, координаты БС 13 через х13, y13, z13, а координаты измерительного устройства 17 через х17, y17, z17,.
Координаты БС и измерительных устройств могут быть определены, например, с помощью приемника сигналов спутников глобальной радионавигационной системы GPS и/или ГЛОНАСС.
Тогда


где с - скорость света.
Уточненное временное рассогласование  сигнала БС 13 относительно сигнала БС 12 равно
сигнала БС 13 относительно сигнала БС 12 равно

При этом точность уточненного временного рассогласования  равна точности усредненного измеренного временного рассогласования Δt13→12,17 и равна σ13→12,17.
равна точности усредненного измеренного временного рассогласования Δt13→12,17 и равна σ13→12,17.
Аналогично определяют уточненное временное рассогласование  сигнала БС 13 относительно сигнала БС 14, уточненное временное рассогласование
сигнала БС 13 относительно сигнала БС 14, уточненное временное рассогласование  сигнала БС 12 относительно сигнала БС 14, уточненное временное рассогласование
сигнала БС 12 относительно сигнала БС 14, уточненное временное рассогласование  сигнала БС 15 относительно сигнала БС 13, уточненное временное рассогласование
сигнала БС 15 относительно сигнала БС 13, уточненное временное рассогласование  сигнала БС 14 относительно сигнала БС 16 и уточненное временное рассогласование
сигнала БС 14 относительно сигнала БС 16 и уточненное временное рассогласование  сигнала БС 16 относительно сигнала БС 15.
сигнала БС 16 относительно сигнала БС 15.
Передают уточненные временные рассогласования  ,
,  ,
,  ,
,  ,
,  и
и  и их точности σ13→12,17, σ13→14,17, σ12→14,17, σ15→13,18, σ14→16,19 и σ16→15,20 с контроллера 21 БС на центр 22 определения местоположения МП.
и их точности σ13→12,17, σ13→14,17, σ12→14,17, σ15→13,18, σ14→16,19 и σ16→15,20 с контроллера 21 БС на центр 22 определения местоположения МП.
Для передачи используют проводную линию связи, соединяющую контроллер 21 БС и центр 22 определения местоположения МП.
Пусть необходимо определить взаимное временное рассогласование  сигнала БС 13 относительно сигнала БС 14.
сигнала БС 13 относительно сигнала БС 14.
Обозначим истинное значение взаимного временного рассогласования сигнала БС 13 относительно сигнала БС 14 через Δt13→14, сигнала БС 13 относительно сигнала БС 12 через Δt13→12, сигнала БС 12 относительно сигнала БС 14 через Δt12→14, сигнала БС 15 относительно сигнала БС 13 через Δt15→13 сигнала БС 14 относительно сигнала БС 16 через Δt14→16, а сигнала БС 16 относительно сигнала БС 15 через Δt16→15.
Так как Δt13→14=Δt13→12+Δt12→14 и Δt13→14=Δt15→13-Δt16→15-Δt14→16, то взаимное временное рассогласование  может быть оценено тремя способами:
может быть оценено тремя способами:
 ,
,
 и
и
 .
.
Представим конфигурацию из БС 12 - 16 и уточненных временных рассогласований  ,
,  ,
,  ,
,  ,
,  и
и  в видe графа (см. фиг.5).
в видe графа (см. фиг.5).
Вершинами полученного графа являются БС 12-16, а ребрами - уточненные временные рассогласования  ,
,  ,
,  ,
,  ,
,  и
и  .
.
Зададим направления ребер графа, совпадающими с направлениями уточненных временных рассогласований. Так, например, ребро между БС 13 и БС 14 соответствует уточненному временному рассогласованию  сигнала БС 13 относительно сигнала БС 14 и, соответственно, направлено от БС 13 к БС 14.
сигнала БС 13 относительно сигнала БС 14 и, соответственно, направлено от БС 13 к БС 14.
Три оценки Δt13→14,17, Δt13→12,17+Δt12→14,17 и -Δt15→13,18-Δt16→15,20-Δt14→16,19 взаимного временного рассогласования  трем путям графа от БС 13 до БС 14, показанным на фиг.6.
трем путям графа от БС 13 до БС 14, показанным на фиг.6.
Данные три пути представляют собой множество всех возможных путей от БС 13 до БС 14.
Вершинами каждого из данных путей являются часть БС, которые являются вершинами графа.
Первой вершиной каждого из данных путей является БС 13, а последней вершиной - БС 14.
Второй вершиной первого пути является БС 12, соседняя с первой вершиной - БС 13.
Второй вершиной третьего пути является БС 15, соседняя с первой вершиной - БС 13. Третьей вершиной третьего пути является БС 16, соседняя со второй вершиной третьего пути - БС 15.
При этом соседними БС определяют такие БС, для которых получено уточненное временное рассогласование их сигналов. Так, например, БС 15 и БС 16 являются соседними, так как получено уточненное временное рассогласование  их сигналов.
их сигналов.
Направление прохода каждого из данных путей определяют от БС 13 до БС 14.
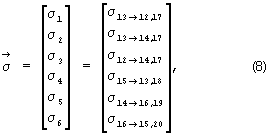
Всего получено шесть уточненных временных рассогласований. Пронумеруем их номерами от 1 до 6, например, следующим образом:
Δt1= ,
,
Δt2= ,
,
Δt3= ,
,
Δt4= ,
,
Δt5= ,
,
Δt6= .
.
Введем понятия вектора уточненных временных рассогласований и вектора точностей уточненных временных рассогласований.
Под вектором уточненных временных рассогласований  длиной, равной шести - числу полученных уточненных временных рассогласований - будем понимать вектор
длиной, равной шести - числу полученных уточненных временных рассогласований - будем понимать вектор

где р-ый элемент Δtp вектора  , где р принимает значения от 1 до 6, равен р-ому уточненному временному рассогласованию сигналов БС.
, где р принимает значения от 1 до 6, равен р-ому уточненному временному рассогласованию сигналов БС.
Под вектором точностей уточненных временных рассогласований  длиной, равной шести - числу полученных уточненных временных рассогласований, будем понимать вектор
длиной, равной шести - числу полученных уточненных временных рассогласований, будем понимать вектор
где р-ый элемент σр вектора  , где р принимает значения от 1 до 6, равен точности р-ого уточненного временного рассогласования сигналов БС.
, где р принимает значения от 1 до 6, равен точности р-ого уточненного временного рассогласования сигналов БС.
Сформируем для каждого пути из сформированного множества всех возможных путей от БС 13 до БС 14 вектор пути, перечисляющий уточненные временные рассогласования сигналов БС, которые входят в данный путь.
Задают длину каждого вектора пути, равной шести - числу уточненных временных рассогласований.
Определяют р-ый элемент и-ого вектора пути, где р принимает значения от 1 до 6, а и принимает значения от 1 до 3, равным 1, если в данном пути есть ребро, соответствующее р-ому уточненному временному рассогласованию, и направление прохода данного ребра р пути совпадает с направлением р-ого уточненного временного рассогласования, равным -1, если в данном пути есть ребро, соответствующее р-ому уточненному временному рассогласованию, и направление прохода данного ребра в пути противоположно направлению р-ого уточненного временного рассогласования, в противоположном случае равным 0.
В результате получают три вектора пути  ,
,  и
и  соответствующие трем путям от БС 13 до БС 14, которые равны
соответствующие трем путям от БС 13 до БС 14, которые равны
Определяют метрику и-ого вектора пути, где и принимает значения от 1 до 3, равной
где  - р-ый элемент и-ого вектора пути,
- р-ый элемент и-ого вектора пути,
σр - р-ый элемент вектора  точностей уточненных временных рассогласований сигналов БС.
точностей уточненных временных рассогласований сигналов БС.
Так, метрика первого вектора пути  равна
равна  , метрика второго вектора пути
, метрика второго вектора пути  равна
равна  , метрика третьего вектора пути
, метрика третьего вектора пути  равна
равна  .
.
Из множества всех возможных векторов путей выбирают группу векторов путей, содержащую каждое из полученных уточненных временных рассогласований, причем число использований каждого из полученных уточненных временных рассогласований в выбранной группе векторов путей не должно превышать число использований этого уточненного временного рассогласования в любой другой группе векторов путей, полученной из множества всех возможных векторов путей, а значения метрик векторов путей в выбранной группе не должны превышать значений метрик векторов путей в любой другой группе векторов путей, полученной из множества всех возможных векторов путей.
Данные три критерия выбора группы векторов путей будут подробнее пояснены позднее.
В данном примере выбранная группа векторов путей совпадает с множеством всех возможных векторов путей от БС 13 до БС 14.
Используя вектор уточненных временных рассогласований  и три сформированных вектора путей
и три сформированных вектора путей  ,
,  и
и  , можно сформировать три оценки величины взаимного временного рассогласования
, можно сформировать три оценки величины взаимного временного рассогласования  сигнала БС 13 относительно сигнала БС 14. При этом r-ая оценка величины взаимного временного рассогласования
сигнала БС 13 относительно сигнала БС 14. При этом r-ая оценка величины взаимного временного рассогласования  , где r принимает значения от 1 до 3, равна
, где r принимает значения от 1 до 3, равна
где  - р-ый элемент г-ого вектора пути
- р-ый элемент г-ого вектора пути  ,
,
Δtp - p-ое уточненное временное рассогласование (р-ый элемент вектора уточненных временных рассогласований  ).
).
Ошибка εr r-ой оценки величины взаимного временного рассогласования  относительно истинного значения временного рассогласования Δt13->14 сигнала БС 13 относительно сигнала БС 14 равна
относительно истинного значения временного рассогласования Δt13->14 сигнала БС 13 относительно сигнала БС 14 равна

Используя вектор точностей уточненных временных рассогласований сигналов БС  и три сформированных вектора пути
и три сформированных вектора пути  ,
,  и
и  , формируют матрицу корреляций между ошибками оценок взаимного временного рассогласования
, формируют матрицу корреляций между ошибками оценок взаимного временного рассогласования  , полученных по отдельным векторам путей.
, полученных по отдельным векторам путей.
Размер матрицы корреляций равен [3×3]. Элемент матрицы корреляций с индексами r1 и r2, где r1 и r2 принимают значения от 1 до 3, равен

где  - коэффициент корреляции между ошибкой
- коэффициент корреляции между ошибкой  r1-ой оценки взаимного временного рассогласования
r1-ой оценки взаимного временного рассогласования  и ошибкой
и ошибкой  r2-ой оценки взаимного временного рассогласования
r2-ой оценки взаимного временного рассогласования  ,
,
 - р-ый элемент r1-ого вектора пути
- р-ый элемент r1-ого вектора пути  ,
,
 - р-ый элемент r2-ого вектора пути
- р-ый элемент r2-ого вектора пути  .
.
В данном примере матрица корреляций  будет равна
будет равна

В общем случае матрица корреляций будет недиагональная.
Формируют матрицу  , обратную к сформированной матрице корреляций
, обратную к сформированной матрице корреляций  . В данном примере матрица
. В данном примере матрица  , обратная к сформированной матрице корреляций
, обратная к сформированной матрице корреляций  , равна
, равна
Используя сформированную группу векторов путей, состоящую из векторов путей  ,
,  и
и  , и сформированную матрицу
, и сформированную матрицу  , обратную к сформированной матрице корреляций
, обратную к сформированной матрице корреляций  , формируют шесть весов уточненных временных рассогласований таким образом, что вес р-ого уточненного временного рассогласования аp, где р принимает значения от 1 до 6, равен
, формируют шесть весов уточненных временных рассогласований таким образом, что вес р-ого уточненного временного рассогласования аp, где р принимает значения от 1 до 6, равен
где  - элемент сформированной матрицы
- элемент сформированной матрицы  с индексами r1 и r2, где r1 и r2 принимают значения от 1 до 3,
с индексами r1 и r2, где r1 и r2 принимают значения от 1 до 3,
 - р-ый элемент r1-ого вектора пути
- р-ый элемент r1-ого вектора пути  ,
,
 - р-ый элемент r2-ого вектора пути
- р-ый элемент r2-ого вектора пути  .
.
В данном примере веса уточненных временных рассогласований равны



Определяют взаимное временное рассогласование  сигнала БС 13 относительно сигнала БС 14 как
сигнала БС 13 относительно сигнала БС 14 как

т.е. как взвешенную сумму всех уточненных временных рассогласований Δtp сигналов БС с весами ap уточненных временных рассогласований сигналов БС, где р принимает значения от 1 до 6.
Рассмотрим теперь систему сотовой радиосвязи, включающую контроллеры БС, БС, измерительные устройства и центр определения местоположения МП, причем каждая БС находится под управлением одного контроллера БС, а на каждом измерительном устройстве принимают сигналы как минимум двух БС, и сигнал каждой БС принимают на как минимум одном измерительном устройстве.
Каждая БС передает сигнал, который представляет собой ее групповой сигнал.
Осуществляют на каждом измерительном устройстве последовательные измерения временного рассогласования сигналов как минимум двух БС, сигналы которых принимают на этом измерительном устройстве, и усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование сигналов этих БС, определяют его точность.
Передают усредненные измеренные временные рассогласования и их точности с каждого измерительного устройства на одну из БС, сигналы которых принимают на этом измерительном устройстве, а с нее - на контроллер БС, под управлением которого она находится.
Вычитают на каждом контроллере БС из усредненного измеренного временного рассогласования каждой пары БС известное значение разности задержек на прямое распространение сигналов от первой БС и второй БС этой пары до измерительного устройства, на котором было получено данное усредненное измеренное временное рассогласование, получая уточненное временное рассогласование сигналов этой пары БС.
Передают все уточненные временные рассогласования сигналов БС и их точности с каждого контроллера БС в центр определения местоположения МП.
Формируют для каждой пары БС множество всех возможных путей от первой БС до второй БС пары следующим образом.
Пусть система сотовой радиосвязи включает L БС.
Пронумеруем все БС номерами от 1 до L.
Определим понятие соседних БС.
БСi является соседней с БСj, где i и j принимают значения 1 до L, если получено хотя бы одно уточненное временное рассогласование сигнала БСi относительно сигнала БСj. При этом, если получено р уточненных временных рассогласований сигнала БСi относительно сигнала БСj, то данные БС являются р раз соседними друг с другом.
Формируют для каждой БС множество соседних БС следующим образом.
Пусть количество БС, соседних с БСi, где г принимает значения 1 до L, равно Qi. Обозначим множество БС, соседних с БСi, через  , где qi-ый элемент
, где qi-ый элемент  множества
множества  , где qi принимает значения от 1 до Q1, - номер q1-ой БС, соседней с БСi. При этом, если какая-то БС является р раз соседней с БСi, то ее номер входит во множество
, где qi принимает значения от 1 до Q1, - номер q1-ой БС, соседней с БСi. При этом, если какая-то БС является р раз соседней с БСi, то ее номер входит во множество  , р раз.
, р раз.
Всего формируют L множеств  соседних БС.
соседних БС.
Формируют для каждой пары БС множество всех возможных путей от первой БС до второй БС пары следующим образом.
Пусть надо найти все пути от БСim до БСjm, где im и jm принимают значения 1 до L. Это осуществляется последовательным перебором:
всех БС, соседних с БСim,
всех БС, соседних с базовыми станциями, соседних с БСim,
всех БС, соседних с базовыми станциями, соседних с базовыми станциями, соседних с БСim,
и т.д.
Причем последовательный перебор осуществляется таким образом, что:
последовательность перебора однозначно определяется последовательностями номеров БС  в сформированных множествах
в сформированных множествах  соседних БС;
соседних БС;
при последовательном переборе в каждый путь добавляют только те номера БС, которые в нем не встречались.
В общем случае длины получившихся в результате последовательного перебора путей будут разные, но длина каждого пути меньше, либо равна количеству БС L.
При последовательном переборе каждый путь представляет собой последовательность номеров БС в пути.
При этом первый элемент последовательности номеров БС каждого из сформированных путей равен im. Последний элемент последовательности номеров БС каждого из сформированных путей может быть равен jm или нет. Из всех сформированных путей оставляют только те, которые заканчиваются на БСjm, т.е. последний элемент последовательности номеров БС которых равен jm.
Пусть таких путей осталось U штук. Они образуют множество всех возможных путей от БСim до БСjm. Пронумеруем их номерами от 1 до U.
Пусть получено Р уточненных временных рассогласований сигналов БС. Пронумеруем их номерами от 1 до Р.
Введем понятия вектора уточненных временных рассогласований и вектора точностей уточненных временных рассогласований.
Под вектором уточненных временных рассогласований  длиной, равной Р - числу полученных уточненных временных рассогласований, будем понимать вектор
длиной, равной Р - числу полученных уточненных временных рассогласований, будем понимать вектор
где р-ый элемент Δtp вектора  , где р принимает значения от 1 до Р, равен р-ому уточненному временному рассогласованию сигналов БС.
, где р принимает значения от 1 до Р, равен р-ому уточненному временному рассогласованию сигналов БС.
Под вектором точностей уточненных временных рассогласований  длиной, равной Р - числу полученных уточненных временных рассогласований, будем понимать вектор
длиной, равной Р - числу полученных уточненных временных рассогласований, будем понимать вектор
где р-ый элемент σр вектора  , где р принимает значения от 1 до Р, равен точности р-ого уточненного временного рассогласования сигналов БС.
, где р принимает значения от 1 до Р, равен точности р-ого уточненного временного рассогласования сигналов БС.
Формируют для каждого пути из каждого сформированного множества всех возможных путей вектор пути, перечисляющий уточненные временные рассогласования сигналов БС, которые входят в данный путь.
Рассмотрим данную операцию, например, для множества всех возможных путей от БСim до БСjm.
Задают длину каждого вектора пути, равной Р - числу уточненных временных рассогласований.
Определяют р-ый элемент и-ого вектора пути, где р принимает значения от 1 до Р, а и принимает значения от 1 до U, равным 1, если в данном пути есть ребро, соответствующее р-ому уточненному временному рассогласованию, и направление прохода данного ребра в пути совпадает с направлением р-ого уточненного временного рассогласования, равным -1, если в данном пути есть ребро, соответствующее р-ому уточненному временному рассогласованию, и направление прохода данного ребра в пути противоположно направлению р-ого уточненного временного рассогласования, в противоположном случае равным 0.
Получают U векторов путей  от БСim до БСjm.
от БСim до БСjm.
Сформированное множество векторов всех возможных путей от БСim до БСjm в общем случае избыточно.
Определяют метрику для каждого из сформированных векторов путей. Так, например, метрику и-го вектора  из множества векторов всех возможных путей от БСim до БСjm определяют как
из множества векторов всех возможных путей от БСim до БСjm определяют как
 ,
,
где  - р-ый элемент и-го вектора пути
- р-ый элемент и-го вектора пути  от БСim до БСjm,
от БСim до БСjm,
σp - р-ый элемент вектора точностей уточненных временных рассогласований  .
.
Из множества всех возможных векторов путей выбирают группу векторов путей, содержащую каждое из полученных уточненных временных рассогласований, причем число использований каждого из полученных уточненных временных рассогласований в выбранной группе векторов путей не должно превышать число использований этого уточненного временного рассогласования в любой другой группе векторов путей, полученной из множества всех возможных векторов путей, а значения метрик векторов путей в выбранной группе не должны превышать значений метрик векторов путей в любой другой группе векторов путей, полученной из множества всех возможных векторов путей.
Рассмотрим данную операцию на примере выбора группы векторов путей из множества всех возможных векторов путей от БСim до БСjm.
Сортируют множество всех возможных векторов путей от БСim до БСjm в порядке возрастания метрик векторов путей. Пусть в результате сортировки получилось U векторов путей  , где вектор пути
, где вектор пути  имеет наименьшую метрику, а вектор пути
имеет наименьшую метрику, а вектор пути  - наибольшую метрику.
- наибольшую метрику.
Определим вектор уточненных временных рассогласований  вектора пути
вектора пути  . Длина вектора
. Длина вектора  равна Р, а р-ый элемент вектора
равна Р, а р-ый элемент вектора  равен
равен  , т.е. равен модулю р-ого элемента вектора пути
, т.е. равен модулю р-ого элемента вектора пути  .
.
Определим вектор уточненных временных рассогласований  векторов путей
векторов путей  Длина вектора
Длина вектора  равна Р, а р-ый элемент вектора
равна Р, а р-ый элемент вектора  определяют следующим образом:
определяют следующим образом:
cp=0, если b
в противном случае cр=1.
Для выбора группы векторов путей из множества всех возможных векторов путей от БСim до БСjm последовательно в U-1 шагов пробуют удалять из множества вектора путей  , при этом на и-ом шаге, где и принимает значения от 2 до U, пробуют удалить вектор пути
, при этом на и-ом шаге, где и принимает значения от 2 до U, пробуют удалить вектор пути  следующим образом:
следующим образом:
формируют вектор  как вектор уточненных временных рассогласований векторов путей
как вектор уточненных временных рассогласований векторов путей  ,
,
если для всех р, где р принимает значения от 1 до Р, для которых cр=0, выполняется условие  , то вектор пути
, то вектор пути  можно удалить, в противном случае пути
можно удалить, в противном случае пути  удалить нельзя.
удалить нельзя.
Пусть осталось R векторов путей от БСim до БСjm. Они образуют выбранную группу векторов путей  от БС im до БС jm, которую используют в дальнейшем.
от БС im до БС jm, которую используют в дальнейшем.
Формируют для каждой пары БС веса уточненных временных рассогласований сигналов БС, используя выбранную группу векторов путей и полученные точности уточненных временных рассогласований сигналов БС.
Поясним данную операцию на примере формирования весов уточненных временных рассогласований сигналов БС для БСim и jm.
Используя вектор точностей уточненных временных рассогласований сигналов БС  и выбранную группу векторов путей
и выбранную группу векторов путей  формируют матрицу корреляций между ошибками оценок взаимного временного рассогласования сигнала БСim относительно сигнала БСjm, полученных по отдельным векторам путей.
формируют матрицу корреляций между ошибками оценок взаимного временного рассогласования сигнала БСim относительно сигнала БСjm, полученных по отдельным векторам путей.
Размер матрицы корреляций равен [R×R]. Элемент матрицы корреляций с индексами r1 и r2, где r1 и r2 принимают значения от 1 до R, равен

где  - коэффициент корреляции между r1-ой и r2-ой ошибками оценки взаимного временного рассогласования сигнала БС im, относительно сигнала БС jm,
- коэффициент корреляции между r1-ой и r2-ой ошибками оценки взаимного временного рассогласования сигнала БС im, относительно сигнала БС jm,
 - р-ый элемент r1-ого вектора пути
- р-ый элемент r1-ого вектора пути  ,
,
 - р-ый элемент r2-ого вектора пути
- р-ый элемент r2-ого вектора пути  .
.
Формируют матрицу  , обратную к сформированной матрице корреляций
, обратную к сформированной матрице корреляций  .
.
Используя выбранную группу векторов путей, состоящую из векторов путей  и сформированную матрицу
и сформированную матрицу  , обратную к сформированной матрице корреляций
, обратную к сформированной матрице корреляций  , формируют Р весов уточненных временных рассогласований таким образом, что вес р-ого уточненного временного рассогласования аp, где р принимает значения от 1 до Р, равен:
, формируют Р весов уточненных временных рассогласований таким образом, что вес р-ого уточненного временного рассогласования аp, где р принимает значения от 1 до Р, равен:
где  - элемент сформированной матрицы
- элемент сформированной матрицы  с индексами r1 и r2,
с индексами r1 и r2,
где r1 и r2 принимают значения от 1 до R,
 - р-ый элемент r1-ого вектора пути
- р-ый элемент r1-ого вектора пути  ,
,
 - р-ый элемент r2-ого вектора пути
- р-ый элемент r2-ого вектора пути  .
.
Определяют взаимное временное рассогласование сигналов каждой пары БС, как взвешенную сумму всех уточненных временных рассогласований сигналов БС с весами уточненных временных рассогласований сигналов БС, сформированными для данной пары БС.
Так, например, определяют взаимное временное рассогласование  сигнала БСim относительно сигнала БСjm как
сигнала БСim относительно сигнала БСjm как

т.е. как взвешенную сумму всех уточненных временных рассогласований Δtp сигналов БС с весами ap уточненных временных рассогласований сигналов БС, сформированных для БСim и jm, где р принимает значения от 1 до Р.
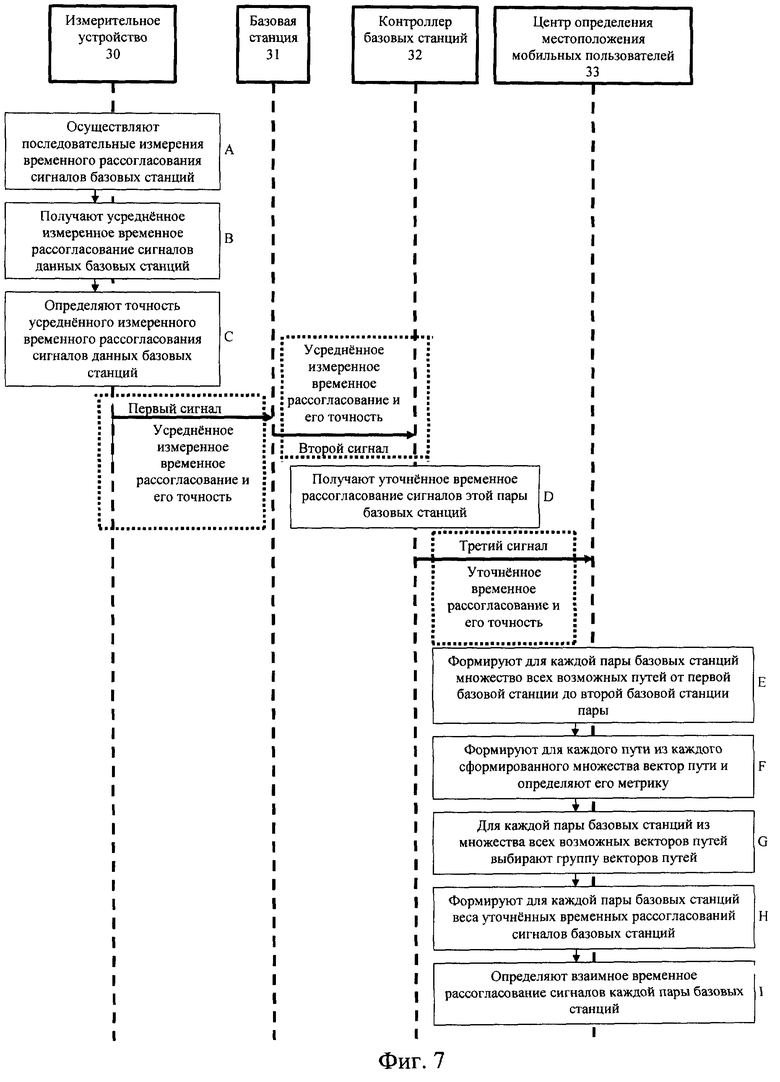
Поясним совместную работу элементов сети сотовой связи при реализации заявляемого способа (см. фиг.7).
На фиг.7 показаны измерительное устройство 30, БС 31, контроллер 32 БС и центр 33 определения местоположения МП.
Для реализации заявляемого способа на измерительном устройстве 30:
на шаге А осуществляют последовательные измерения временного рассогласования сигналов как минимум двух БС, сигналы которых принимают на этом измерительном устройстве,
на шаге В усредняют данные измерения временного рассогласования, получая усредненное измеренное временное рассогласование сигналов этих БС,
на шаге С определяют его точность.
Передают с измерительного устройства 30 на БС 31 первый сигнал, содержащий усредненное измеренное временное рассогласование сигналов пары БС и его точность.
Передают с БС 31 на контроллер 32 БС второй сигнал, содержащий усредненное измеренное временное рассогласование сигналов пары БС и его точность.
Для реализации заявляемого способа на контроллере 32 БС на шаге D вычитают из усредненного измеренного временного рассогласования каждой пары БС известное значение разности задержек на прямое распространение сигналов от первой БС и второй БС этой пары до измерительного устройства, на котором было получено данное усредненное измеренное временное рассогласование, получая уточненное временное рассогласование сигналов этой пары БС.
Передают с контроллера 32 БС на центр 33 определения местоположения МП третий сигнал, содержащий уточненное временное рассогласование каждой пары БС и его точность.
Для реализации заявляемого способа на центре 33 определения местоположения МП:
на шаге Е формируют для каждой пары БС множество всех возможных путей от первой БС до второй БС пары,
на шаге F формируют для каждого пути из каждого сформированного множества вектор пути, перечисляющий уточненные временные рассогласования сигналов БС, которые входят в данный путь, и определяют его метрику,
на шаге G для каждой пары БС из множества всех возможных векторов путей выбирают группу векторов путей, содержащую каждое из полученных уточненных временных рассогласований, причем число использований каждого из полученных уточненных временных рассогласований в выбранной группе векторов путей не должно превышать число использований этого уточненного временного рассогласования в любой другой группе векторов путей, полученной из множества всех возможных векторов путей, а значения метрик векторов путей в выбранной группе не должны превышать значений метрик векторов путей в любой другой группе векторов путей, полученной из множества всех возможных векторов путей,
на шаге Н формируют для каждой пары БС веса уточненных временных рассогласований сигналов БС, используя выбранную группу векторов путей и полученные точности уточненных временных рассогласований сигналов БС,
на шаге I определяют взаимное временное рассогласование сигналов каждой пары БС как взвешенную сумму всех уточненных временных рассогласований сигналов БС с весами уточненных временных рассогласований сигналов БС, сформированными для данной пары БС.
БС, контроллеры БС и центр определения местоположения МП могут быть выполнены, например, как в способе по патенту WO99/57826: Method Of Synchronization Of A Base Station Network, 4 May 1998, [8].
Кратко опишем блоки, которые должны содержать перечисленные элементы сети сотовой радиосвязи для реализации способа определения взаимного временного рассогласования сигналов БС в системе сотовой радиосвязи.
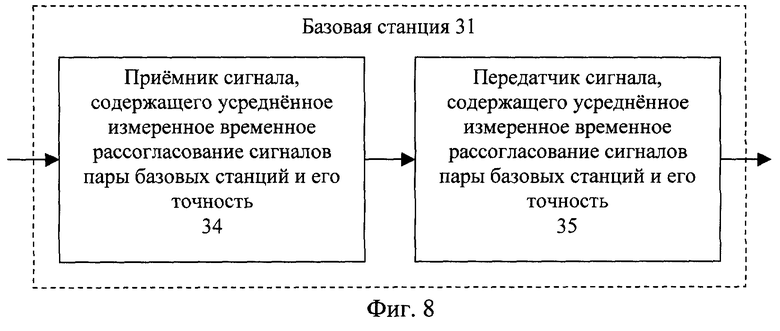
Для выполнения заявляемого способа БС 31 (см. фиг.8) должна содержать, как минимум, приемник 34 сигнала, содержащего усредненное измеренное временное рассогласование сигналов пары БС и его точность, и передатчик 35 сигнала, содержащего усредненное измеренное временное рассогласование сигналов пары БС и его точность.
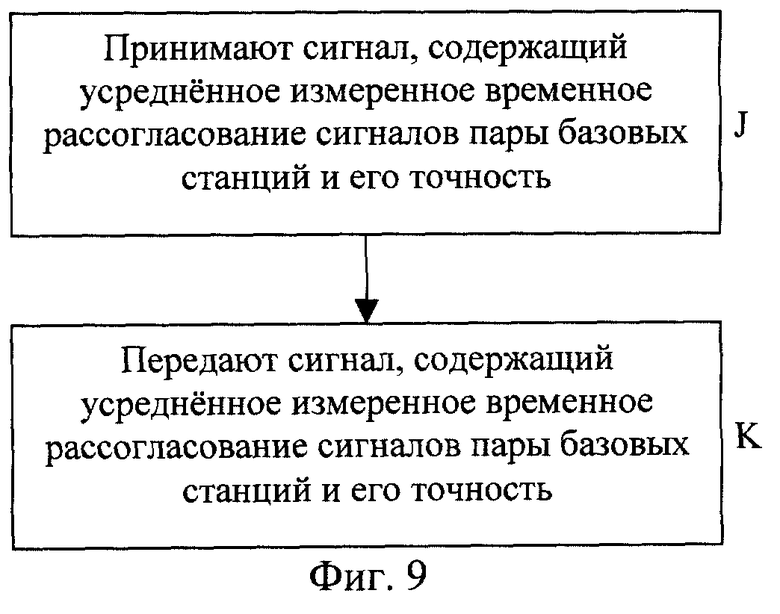
Посредством БС 31 (см. фиг.9):
на шаге J принимают с помощью приемника 34 сигнал, содержащий усредненное измеренное временное рассогласование сигналов пары БС и его точность, который был передан с измерительного устройства 30,
на шаге К передают с помощью передатчика 35 сигнал, содержащий усредненное измеренное временное рассогласование сигналов пары БС и его точность, на контроллер 32 БС.
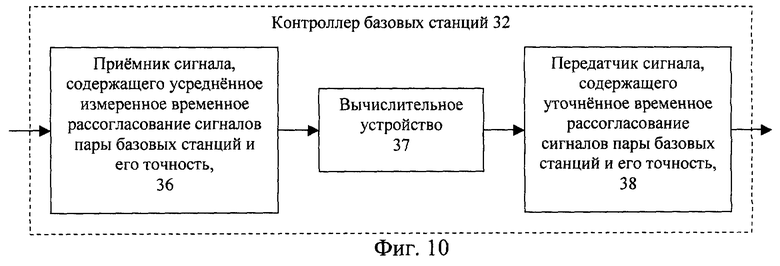
Для выполнения заявляемого способа контроллер 32 БС (см. фиг.10) должен содержать, как минимум, приемник 36 сигнала, содержащего усредненное измеренное временное рассогласование сигналов пары БС и его точность, вычислительное устройство 37 и передатчик 38 сигнала, содержащего уточненное временное рассогласование сигналов пары БС и его точность.
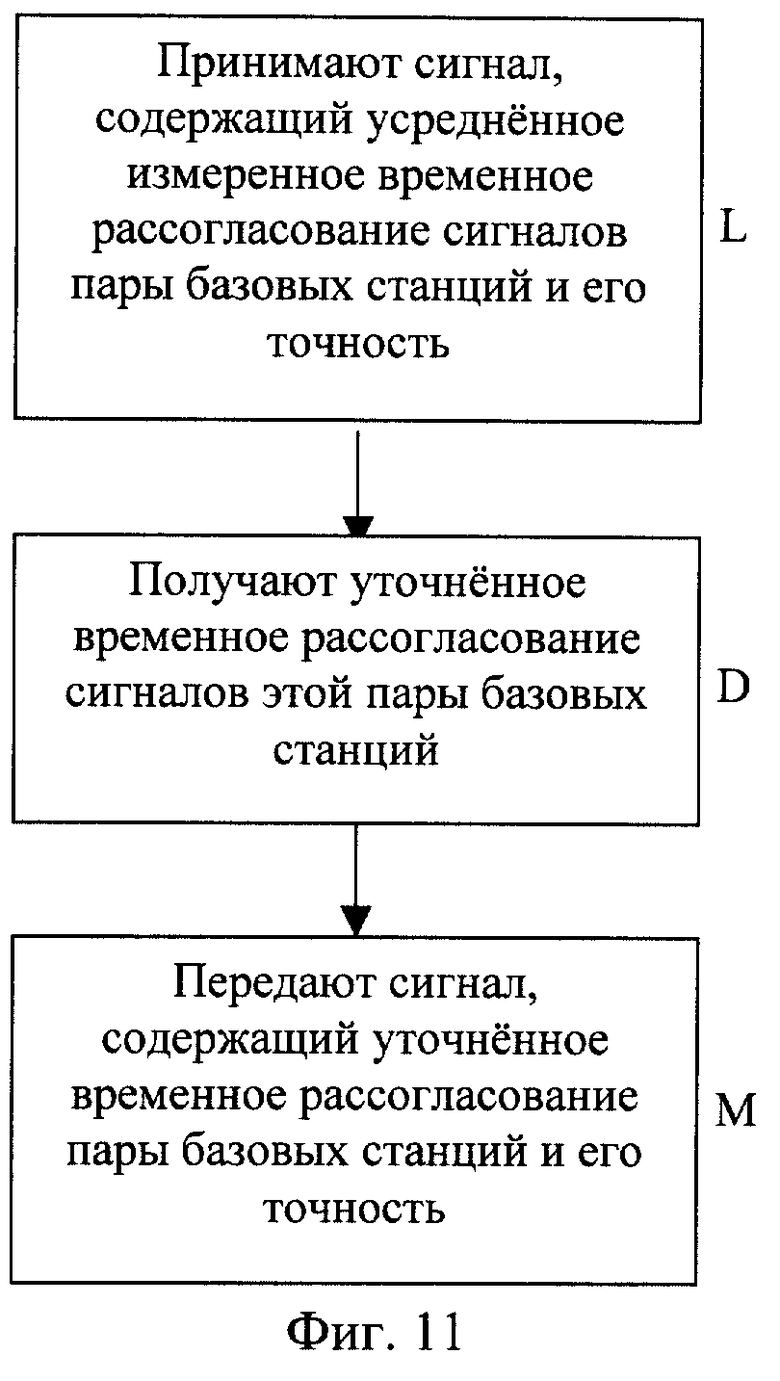
Посредством контроллера 32 БС (см. фиг.11):
на шаге L принимают с помощью приемника 36 сигнал, содержащий усредненное измеренное временное рассогласование сигналов пары БС и его точность, который был передан с БС 31,
на шаге D вычитают на вычислительном устройстве 37 из усредненного измеренного временного рассогласования каждой пары БС известное значение разности задержек на прямое распространение сигналов от первой БС и второй БС этой пары до измерительного устройства, на котором было получено данное усредненное измеренное временное рассогласование, получая уточненное временное рассогласование сигналов этой пары БС,
на шаге М передают с помощью передатчика 38 сигнал, содержащий уточненное временное рассогласование сигналов этой пары БС и его точность, на центр 33 определения местоположения МП.
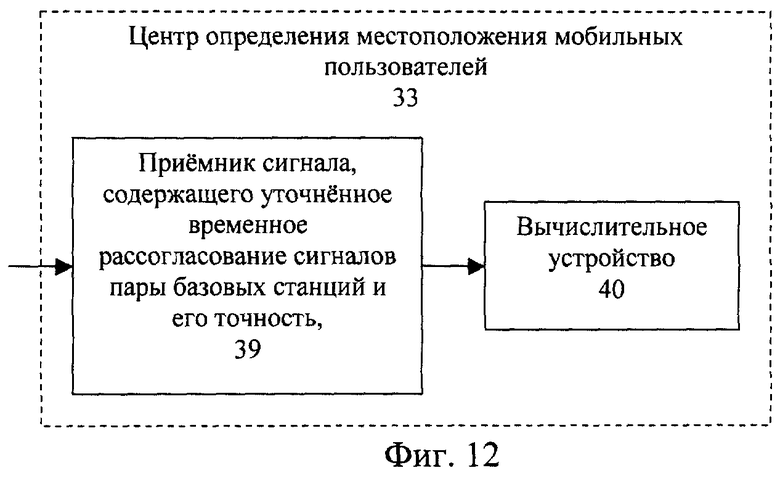
Для выполнения заявляемого способа центр 33 определения местоположения МП (см. фиг.12) должен содержать как минимум приемник 39 сигнала, содержащего уточненное временное рассогласование сигналов пары БС и его точность, и вычислительное устройство 40.
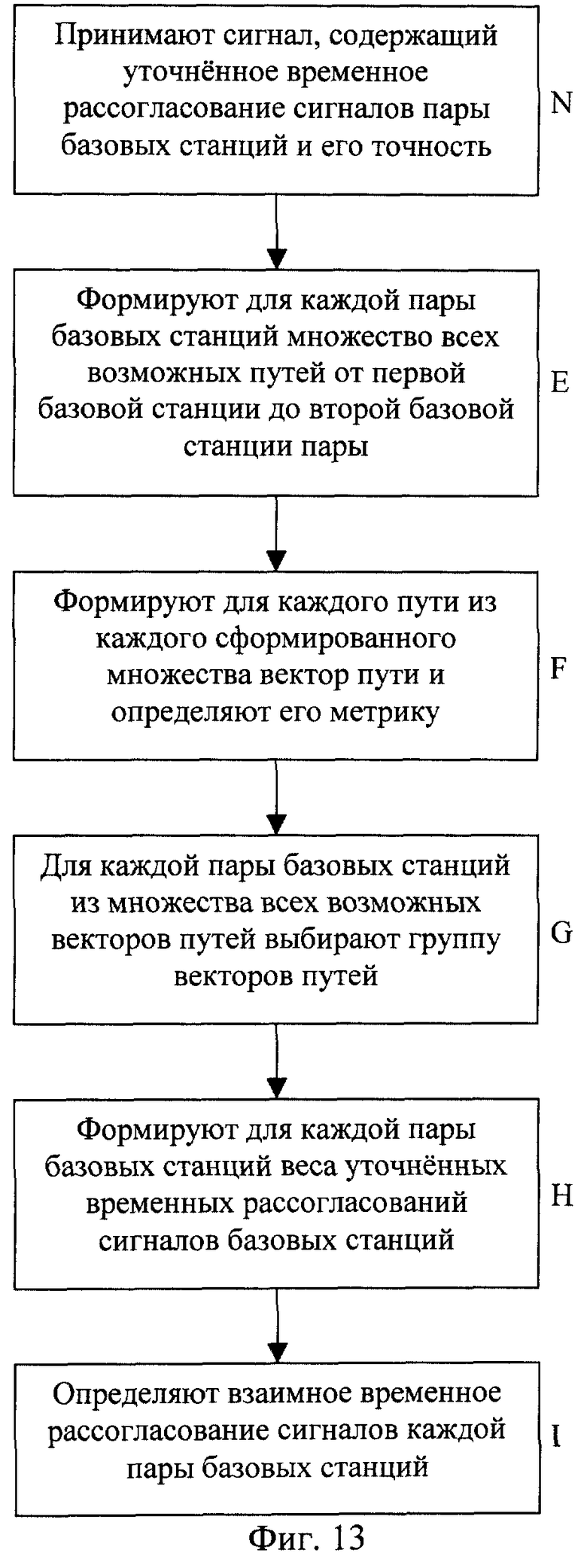
Посредством центра 33 определения местоположения МП (см. фиг.13):
на шаге N принимают с помощью приемника 39 сигнал, содержащий уточненное временное рассогласование сигналов пары БС и его точность, который был передан с контроллера 32 БС,
на шаге Е посредством вычислительного устройства 40 формируют для каждой пары БС множество всех возможных путей от первой БС до второй БС пары,
на шаге F формируют для каждого пути из каждого сформированного множества вектор пути, перечисляющий уточненные временные рассогласования сигналов БС, которые входят в данный путь, и определяют его метрику,
на шаге G для каждой пары БС из множества всех возможных векторов путей выбирают группу векторов путей, содержащую каждое из полученных уточненных временных рассогласований, причем число использований каждого из полученных уточненных временных рассогласований в выбранной группе векторов путей не должно превышать число использований этого уточненного временного рассогласования в любой другой группе векторов путей, полученной из множества всех возможных векторов путей, а значения метрик векторов путей в выбранной группе не должны превышать значений метрик векторов путей в любой другой группе векторов путей, полученной из множества всех возможных векторов путей,
на шаге Н формируют для каждой пары БС веса уточненных временных рассогласований сигналов БС, используя выбранную группу векторов путей и полученные точности уточненных временных рассогласований сигналов БС,
на шаге I определяют взаимное временное рассогласование сигналов каждой пары БС как взвешенную сумму всех уточненных временных рассогласований сигналов БС с весами уточненных временных рассогласований сигналов БС, сформированными для данной пары БС.
Заявляемый способ определения взаимного временного рассогласования сигналов БС обладает следующими существенными преимуществами по сравнению с известными в данной области техники, изобретениями.
Во-первых, заявляемый способ позволяет определить взаимное временное рассогласование сигналов любой пары БС, независимо от наличия уточненного временного рассогласования их сигналов.
Во-вторых, заявляемый способ позволяет повысить точность определения взаимных временных рассогласований сигналов БС.
Эти преимущества достигаются за счет совместной статистической обработки всех уточненных временных рассогласований сигналов БС.
Изобретение относится к области радиотехники, в частности к способу определения взаимного временного рассогласования сигналов базовых станций (БС) в системе сотовой радиосвязи, и может быть использовано, например, в системах сотовой радиосвязи третьего поколения при определении местоположения мобильного пользователя (МП). Техническим результатом является определение взаимного временного рассогласования сигналов любой пары БС системы радиосвязи и повышения точности определения взаимного временного рассогласования сигналов БС, что достигается за счет совместной статистической обработки всех уточненных временных рассогласований сигналов БС. 4 з.п. ф-лы, 13 ил.

где  - элемент матрицы, обратной к сформированной матрице корреляций между ошибками оценок взаимного временного рассогласования данной пары базовых станций, с индексами r1 и r2;
- элемент матрицы, обратной к сформированной матрице корреляций между ошибками оценок взаимного временного рассогласования данной пары базовых станций, с индексами r1 и r2;
 - р-й элемент r1-го вектора пути выбранной группы;
- р-й элемент r1-го вектора пути выбранной группы;
 - р-й элемент r2-го вектора пути выбранной группы.
- р-й элемент r2-го вектора пути выбранной группы.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ БАЗОВОЙ СТАНЦИИ В СОТОВЫХ СИСТЕМАХ РАДИОСВЯЗИ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ, СПОСОБ ОЦЕНКИ ЧАСТОТЫ ЗАМИРАНИЙ СИГНАЛА В СРЕДЕ РАСПРОСТРАНЕНИЯ В СИСТЕМАХ РАДИОСВЯЗИ С ЗАМКНУТОЙ ПЕТЛЕЙ РЕГУЛИРОВКИ МОЩНОСТИ ПОДВИЖНОЙ СТАНЦИИ И ПРИЕМНАЯ АППАРАТУРА БАЗОВОЙ СТАНЦИИ (ВАРИАНТЫ) | 1998 |
|
RU2137314C1 |
| US 5831576 A, 03.11.1998. | |||

