Изобретение относится к радиотехнике, конкретно к разностно-дальномерным способам измерения пространственных координат летательных аппаратов по сигналам радиоизлучения их бортового радиоэлектронного оборудования.
Известны разностно-дальномерные способы измерения пространственных координат летательных аппаратов (ЛА) по сигналам радиоизлучения их бортового радиоэлектронного оборудования (БРО) [1-7], основанные на приеме сигналов радиоизлучения ЛА разнесенными в пространстве приемниками, измерении разностей времен приема сигнала радиосигналов ЛА разнесенными приемниками, образующими плоскости независимых измерительных баз, и дальнейшем вычислении пространственных координат ЛА как точки геометрического пересечения указанных плоскостей.
Наиболее близким по технической сущности к заявляемому изобретению является разностно-дальномерный способ определения координат источников радиоизлучения [2], включающий прием сигналов источников радиоизлучения (ИРИ) пространственно разнесенными радиоприемниками с известными пространственными координатами, измерении относительной задержки принятых радиосигналов разнесенными радиоприемниками и расчете пространственных координат ЛА по измеренным значениям относительных временных задержек радиосигналов ЛА на разнесенных радиоприемниках по известным значениям пространственных координат разнесенных радиоприемников и по известной скорости распространения радиоволн.
При этом известный способ предназначен для измерения координат малоподвижных ИРИ, разнесенный прием сигналов ИРИ осуществляется с борта космических аппаратов (КА), установленных на геостационарных орбитах, измерение задержки сигналов ИРИ оценивается на основе поиска передних фронтов импульсов ИРИ.
Недостатком известного способа измерения координат является пониженная точность измерения координат ЛА с ИРИ.
Это связано с тем, что при измерении разности прихода сигналов от подвижных ИРИ необходимо учитывать возможный сдвиг частоты, обусловленный эффектом Доплера и измерение задержек должно быть устойчивым к значениям начальной фазы сигналов ИРИ бортового радиоэлектронного оборудования (БРО) ЛА.
Кроме того, известный разностно-дальномерный способ измерения координат по ИРИ с непрерывным (не импульсным) радиоизлучением вообще не работает из-за отсутствия передних фронтов в непрерывных сигналах. Этим дополнительно снижаются возможности известного разностно-дальномерного способа по измерению координат и обслуживанию ЛА с современной навигационной аппаратурой и широкополосными средствами цифровой радиосвязи.
Задачей и техническим результатом изобретения является повышение точности измерения координат ЛА с одновременным расширением класса обслуживаемого БРО ЛА.
Сущность изобретения
Для достижения заявленного технического результата и решения поставленной задачи разностно-дальномерный способ измерения пространственных координат летательных аппаратов по сигналам радиоизлучения их бортового радиоэлектронного оборудования включает прием радиосигналов летательного аппарата (ЛА) пространственно разнесенными радиоприемниками с известными пространственными координатами, измерение относительной задержки принятых радиосигналов разнесенными радиоприемниками и расчет пространственных координат ЛА по измеренным значениям относительных временных задержек радиосигналов ЛА на разнесенных радиоприемниках по известным значениям пространственных координат разнесенных радиоприемников и по известной скорости распространения радиоволн.
Согласно изобретению прием радиосигналов ЛА ведут радиоприемниками с низкоорбитальных космических аппаратов (КА). Принятые радиосигналы преобразуют в цифровую форму и ретранслируют их совместно с текущими значениями пространственных координат КА с их борта по цифровой линии радиосвязи на наземный пункт обработки сигналов ЛА с бортов КА и дальнейшего расчета пространственных координат ЛА.
При этом в процессе измерения относительных временных задержек радиосигналов ЛА измеряют центральную частоту спектра сканирования радиосигналов ЛА. Рассчитывают максимально возможное значение полосы доплеровского сдвига ее при встречном движении ЛА и КА. В найденной полосе частот с шагом единицы килогерц производят взаимную корреляционную обработку принятых радиосигналов ЛА одновременно двумя квадратурными каналами по каждой паре сигналов из группы радиосигналов ЛА. Сравнивают на каждом шаге численное значение взаимной корреляционной функции сигналов с пороговым значением и моменты превышения ее порогового значения принимают за истинное значение временного сдвига радиосигналов ЛА относительно текущих местоположений каждого КА, используемых далее для расчета пространственных координат ЛА.
Расчет максимально возможного значения полосы доплеровского сдвига частот принятых радиосигналов при встречном движении ЛА и КА и взаимная корреляционная их обработка одновременно двумя квадратурными каналами по каждой паре сигналов из группы радиосигналов ЛА и сравнение на каждом шаге численного значения взаимной корреляционной функции сигналов с пороговым значением позволяют определить истинное значение временного сдвига радиосигналов ЛА относительно текущих местоположений каждого КА независимо от вида радиоизлучения ЛА (непрерывный и импульсные радиосигналы), используемых далее для расчета пространственных координат ЛА.
Этим обеспечивается не только повышение точности измерения координат ЛА за счет повышения точности измерения задержек радиосигналов ЛА относительно различных КА, но и расширяются функциональные возможности способа по измерению координат ЛА практически по всем видам его радиоизлучающего БРО.
Изобретение стало возможным благодаря исследованию движения разнесенных КА (на одной орбите) относительно воздушного объекта, двигающегося на одной высоте, и выводу математических формул и алгоритмов для реализации предложенного способа.
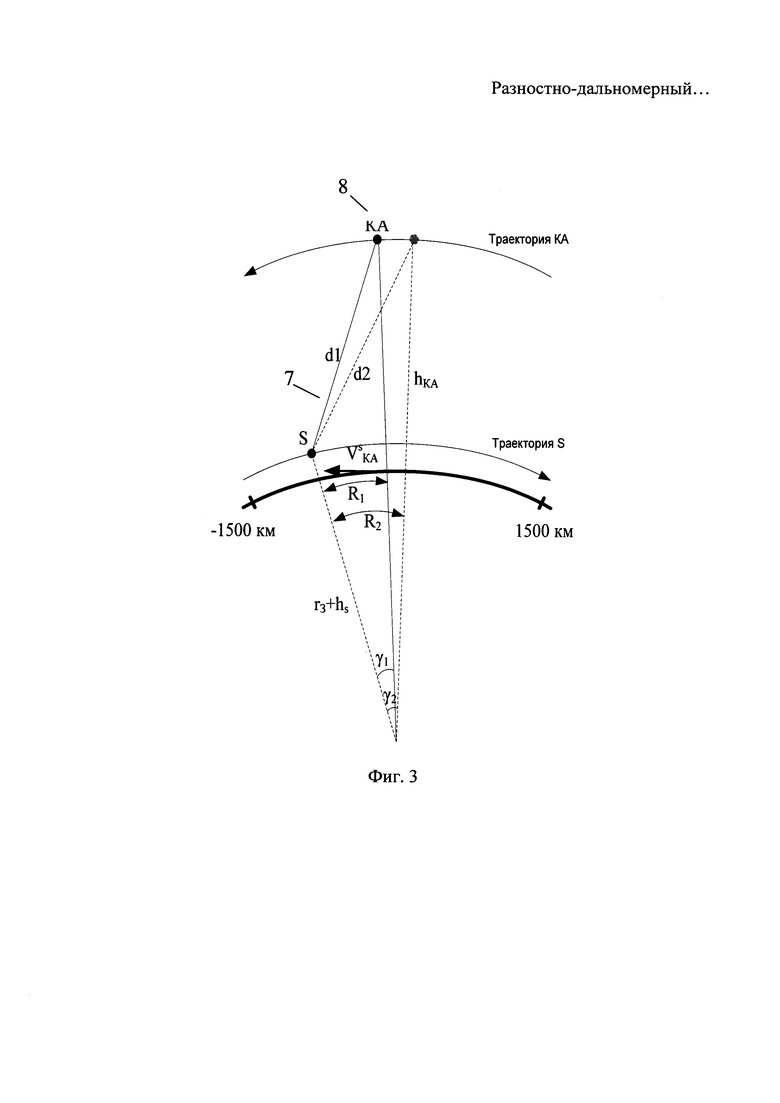
Очевидно, что разнос частот определяется взаимной радиальной скоростью между каждым КА и ЛА, например самолетом, поэтому наибольшие значения  будут наблюдаться при движении самолета вдоль трассы орбит движения КА в противоположном направлении, как показано на фиг. 3 для плоскости орбиты.
будут наблюдаться при движении самолета вдоль трассы орбит движения КА в противоположном направлении, как показано на фиг. 3 для плоскости орбиты.
Для упрощения доказательств примем траекторию движения самолета за круг, радиус которого равен сумме радиуса Земли (rz=6371,2 км) и высоте полета самолета (hs=10 км). Расчеты производятся относительно Земли для всей зоны разведки Zp от -1500 км до 1500 км при заданной точке стояния спутника.
Мгновенным значением радиальной скорости Vr является скорость изменения прямой дальности от спутника (КА) до самолета Ad за единицу времени Δt:

Мгновенная радиальная скорость Vr определяется для каждой точки траектории полета самолета с дискретностью в 1 км в диапазоне:  в соответствии с формулой:
в соответствии с формулой:
где  - скорость сближения КА и самолета относительно земной поверхности;
- скорость сближения КА и самолета относительно земной поверхности;
hKA - высота орбиты КА;
hs - высота воздушного объекта;
rz - радиус Земли;
R(i) - расстояние от КА до самолета;
Δr - минимальное приращение по расстоянию (R2-R1).
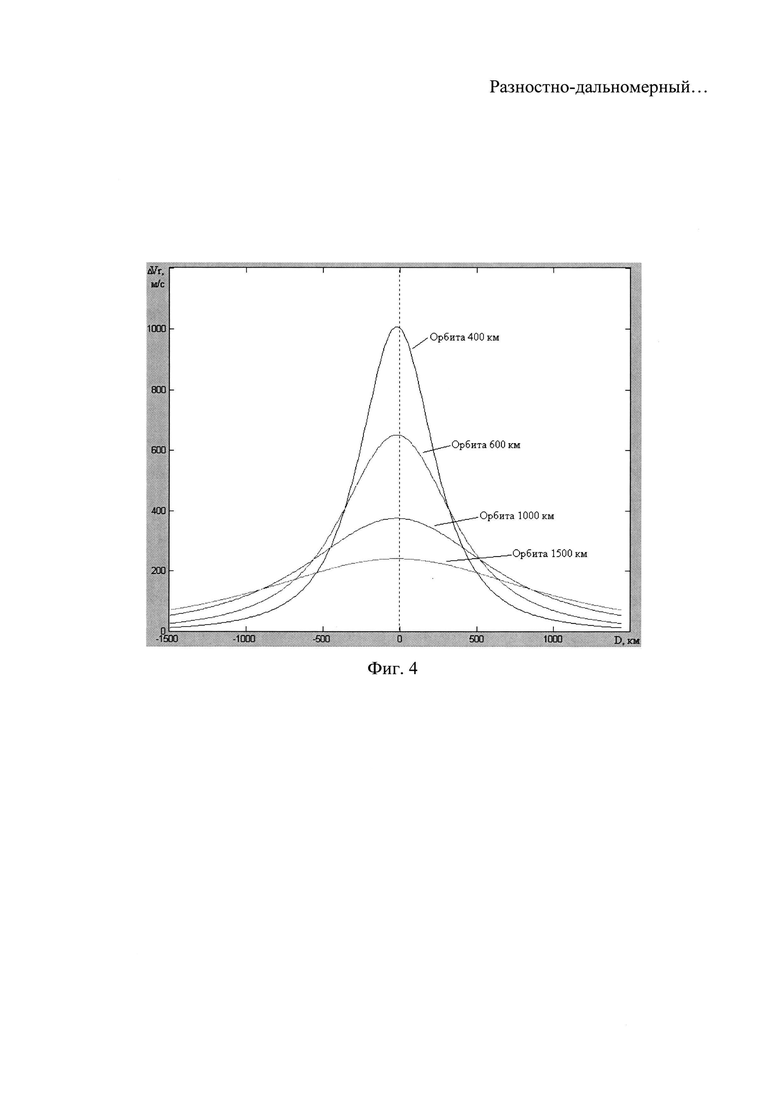
На основе имитационного моделирования условий (1-2) были проведены оценки мгновенных радиальных скоростей для всей зоны контроля и различных орбит КА. При этом анализировались низкоорбитальные круговые орбиты с высотами от 400 до 1500 км для двух разнесенных КА, размещаемых на одной орбите на расстоянии 50 км друг от друга.
Анализ результатов моделирования показал наличие разности мгновенной скорости ΔVr между разнесенными КА и, как следствие, разностью мгновенных частот принятого сигнала. График зависимости разности мгновенных радиальных скоростей для двух разнесенных КА с учетом высот орбит представлен на фиг. 4. Анализ данного графика позволяет сделать вывод, что максимальное значение частотного рассогласования наблюдается в точке, когда оба КА равноудалены от воздушного объекта.
С учетом этого выведена формула расчета максимального значения частотного рассогласования. Граничные значения разности частот принятых сигналов от одного источника радиоизлучений разнесенными позициями КА могут быть получены в соответствии с известной формулой расчета доплеровского приращения частоты  [3]:
[3]:
где 
 - средняя частота анализируемого участка;
- средняя частота анализируемого участка;
 и
и  - мгновенные радиальные скорости разнесенных КА;
- мгновенные радиальные скорости разнесенных КА;
с - скорость распространения электромагнитной волны.
Тогда, с учетом (2) и (3), максимальное значение частотного рассогласования может быть рассчитано следующим образом:

где µ - гравитационный параметр, равный для Земли 398600 км3/с2;
В - расстояние между КА на орбите, или база.
Формула (4) позволяет создать массив значений частот с дискретностью - 1 кГц, где n определяется максимальным значением доплеровского сдвига для измеренной несущей частоты сигнала. При этом
с дискретностью - 1 кГц, где n определяется максимальным значением доплеровского сдвига для измеренной несущей частоты сигнала. При этом 
 a n=Fmax(Гц)/1000. Это, в свою очередь, позволяет создать массив данных сдвинутых по частоте для импульсных радиосигналов ИРИ. Для непрерывных сигналов ИРИ - n массивов, содержащих блоки данных, представляющих собой квадратурные отсчеты, принятые со второго канала и сдвинутые по частоте на величины
a n=Fmax(Гц)/1000. Это, в свою очередь, позволяет создать массив данных сдвинутых по частоте для импульсных радиосигналов ИРИ. Для непрерывных сигналов ИРИ - n массивов, содержащих блоки данных, представляющих собой квадратурные отсчеты, принятые со второго канала и сдвинутые по частоте на величины 
В рамках общей теории цифровой обработки сигналов [4] перенос спектра по оси частот на величину  где
где  - частота сдвига;
- частота сдвига; - частота дискретизации, осуществляется путем умножения отсчетов сигнала х(n) на отсчеты дискретной экспоненты ej2πnγ, причем 0<|γ|≤0,5.
- частота дискретизации, осуществляется путем умножения отсчетов сигнала х(n) на отсчеты дискретной экспоненты ej2πnγ, причем 0<|γ|≤0,5.
Учитывая то, что сигнал представляет собой косинусные и синусные отсчеты, умножение входных отсчетов производится на комплексную экспоненту, представленную в виде:
Тогда выходной сигнал представляет собой комплексные отсчеты вида:

В данной формуле знаки выставляются в зависимости от того, в какую сторону необходимо перенести спектр сигнала.
Корреляционная обработка этих сигналов двумя квадратурными каналами I и Q [5], сдвинутыми по фазе на 90°, позволяет исключить потерю полезного сигнала за счет незнания его начальной фазы. Если полезный сигнал не создает эффекта в первом канале, то за счет сдвига фаз он даст приращение корреляционного интеграла во втором квадратурном канале. Поэтому при наличии двух квадратурных каналов результат обработки не зависит от случайной фазы. Это позволяет восстановить корреляционную зависимость сигналов, принятых от одного источника с различными начальными фазами. На практике, при работе с конечными длительностями сигналов, представляемых в цифровой форме, используют формулу оценки максимальных значений функции взаимной корреляции при Δt=const (соответствует частоте дискретизации сигнала) для сигналов х(n) и y(n), содержащих оцифрованный сигнал от одного ИРИ с числом отсчетов N:

где N - размерность анализируемой выборки, содержащей цифровые отсчеты сигнала ИРИ (или часть полезного сигнала для непрерывных видов сигналов);
Kmax - количество отсчетов, соответствующее максимально возможному временному рассогласованию сигналов.
После вычисления (7) по каждому каналу. и
и  вычисляется обобщенный показатель В(k):
вычисляется обобщенный показатель В(k):

Решение о наличии сигнала в анализируемой выборке и времени задержки принимаемых сигналов между бортами КА принимается на основе сравнения В(k) с порогом по всем блокам данных. При этом определение местоположения объекта осуществляется в рамках известной теории [5] по измеренным с высокой точностью задержкам сигнала.
Сущность изобретения поясняется чертежами, представленными на фиг. 1-4.
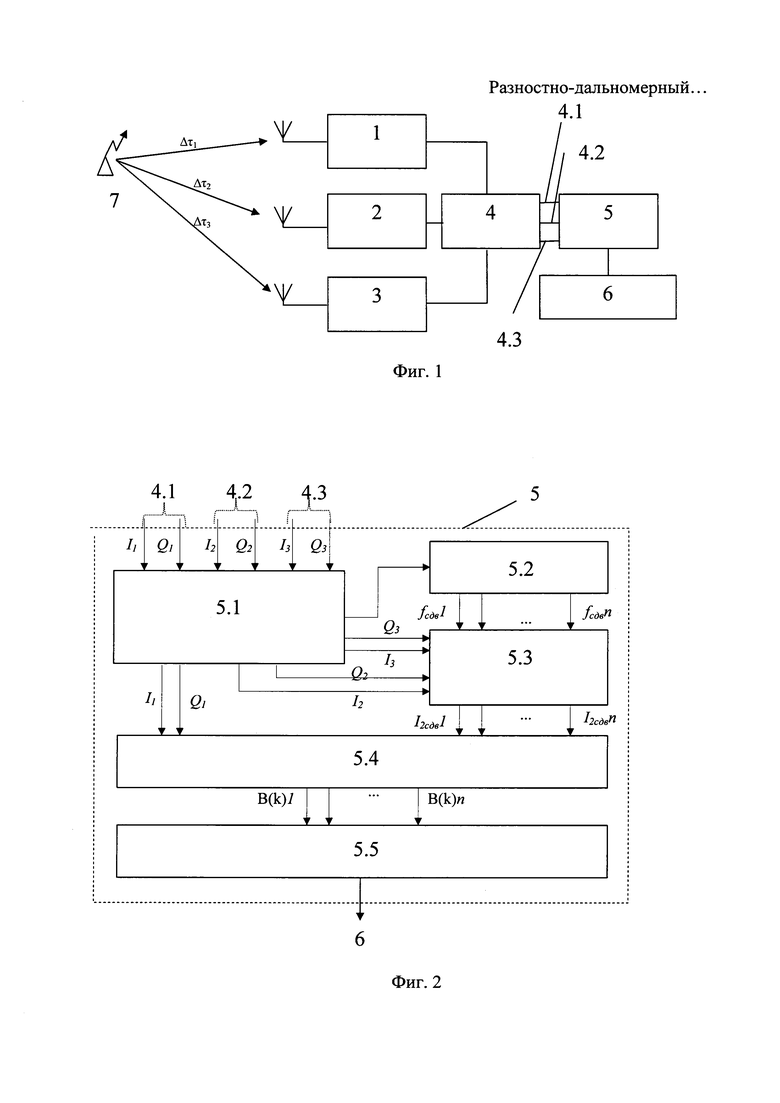
На фиг. 1 представлена функциональная схема наземно-космической системы, реализующей предложенный способ, на фиг. 2 - функциональная схема модуля корреляционного измерения временной задержки между радиосигналами, на фиг. 3 - чертеж, поясняющий принцип выбора полосы корреляционной обработки радиосигналов КА, необходимой для измерения задержек между ними, на фиг. 4 - экспериментальная зависимость разности радиальных скоростей ΔVr двух КА, разнесенных по траектории на 50 км друг от друга, от высоты полета КА и от дальности D между КА и ЛА при встречном их движении.
Предложенный разностно-дальномерный способ измерения пространственных координат ЛА, летящих в приземных слоях атмосферы, по сигналам радиоизлучения бортового радиоэлектронного оборудования (БРО) ЛА заключается в частотном сканировании воздушного пространства и приеме радиосигналов БРО ЛА радиоприемниками одновременно не менее чем с трех низкоорбитальных космических аппаратов (КА), разнесенных в пространстве и с известными параметрами движения. Принятые радиосигналы на каждом КА преобразуют в цифровую форму и ретранслируют их совместно с текущими значениями пространственных координат КА с их борта по цифровой линии радиосвязи на наземный пункт обработки сигналов ЛА. На наземном пункте обработки измеряют среднюю частоту области сканирования приемников ЛА. Рассчитывают для нее максимально возможное значение полосы доплеровского сдвига при встречном движении ЛА и КА. В найденной полосе частот с шагом единицы килогерц производят взаимную корреляционную обработку принятых радиосигналов ЛА одновременно двумя квадратурными каналами по каждой паре сигналов из группы радиосигналов ЛА. Сравнивают на каждом шаге численное значение взаимной корреляционной функции сигналов с пороговым значением и моменты превышения ее порогового значения принимают за истинное значение временного сдвига радиосигналов ЛА относительно текущих местоположений каждого КА. Далее по измеренным значениям относительных временных задержек радиосигналов ЛА на разнесенных радиоприемниках по известным значениям пространственных координат разнесенных радиоприемников КА и по известной скорости распространения радиоволн рассчитывают пространственные координаты ЛА.
Наземно-космическая система, реализующая предложенный способ, включает в себя не менее трех радиоприемников (1, 2, 3), разнесенных в пространстве и размещенных на низкоорбитальных КА с высотой полета 400-1500 км над поверхностью Земли. Радиоприемники 1-3 (приемные каналы) борта соответствующих КА выполнены с цифровым выходом, с возможностью разведки и приема излучений бортового радиоэлектронного оборудования (БРО) летательных аппаратов (ЛА) и соединены через модуль 4 связи и синхронизации с наземной станцией обработки сигналов КА. Модуль 4 связи и синхронизации выполнен в виде модемной широкополосной многоканальной линии связи. Каналы модемной связи по сигналам 4.1, 4.2, 4.3 от соответствующих приемников КА соединены с соответствующими цифровыми каналами наземной станции обработки амплитудно-временных (АВХ) и амплитудно-частотных характеристик (АЧХ) сигналов КА в системе сигналов единого времени (СЕВ). Наземная станция включает последовательно соединенные модуль 5 корреляционного измерения относительной временной задержки радиосигналов ЛА между бортами КА и модуль 6 расчета пространственных координат (РПК) ЛА (носителя ИРИ 7) по измеренным значениям относительных временных задержек радиосигналов ИРИ 7 на разнесенных по космическим орбитам радиоприемниках, по известным значениям текущего пространственного положения приемников на орбитах КА и по известной скорости распространения радиоволн. Модули 1, 2, 3, 4 и 6 наземно-космической системы выполнены на известной элементной базе [1-7].
Неизвестной из уровня техники в заявленной системе является конструкция модуля 5, разработанная для высокоточного измерения относительной временной задержки как импульсных, так и непрерывных радиосигналов БРО ЛА между приемными каналами КА.
Модуль 5 содержит блок 5.1 частотной и фазовой коррекции (ЧФК) текущих значений сигналов 4.1…4.3 вида I и Q [5] с общей несущей частотой f и неопределенной фазой в диапазоне 0…90°. Первые выходы блока ЧФК 5.1 по максимальным допустимым значениям частоты (fдоп=Fmax) доплеровского сдвига сигналов 4.2 и 4.3 второго и третьего приемных каналов относительно сигналов 4.1 первого (опорного) канала приема соединены через блок 5.2 формирования сетки частот (ФСЧ) сдвига  с первыми входами блока 5.3 формирования массивов (ФМ) амплитудно-временных характеристик (АВХ) и амплитудно-частотных характеристик (АЧХ) сигналов 4.2 и 4.3, сдвинутых по частоте и времени относительно сигналов 4.1. Вторые выходы блока 5.1 по текущим значениям сигналов 4.1 соединены с первыми входами блока 5.4 корреляционной квадратурной обработки (ККО) сигналов, вторые входы которого по задержанным сигналам 4.2 и 4.3 соединены через блок 5.3 ФМ с третьими и четвертыми выходами блока 5.1 ФСЧ. Выход блока 5.4 ККО соединен через пороговое устройство (ПУ) 5.5 принятия решения о наличии сигнала и измерении временной задержки. ПУ 5.5 выполнено в виде вычислителя обобщенного показателя из выражения (8).
с первыми входами блока 5.3 формирования массивов (ФМ) амплитудно-временных характеристик (АВХ) и амплитудно-частотных характеристик (АЧХ) сигналов 4.2 и 4.3, сдвинутых по частоте и времени относительно сигналов 4.1. Вторые выходы блока 5.1 по текущим значениям сигналов 4.1 соединены с первыми входами блока 5.4 корреляционной квадратурной обработки (ККО) сигналов, вторые входы которого по задержанным сигналам 4.2 и 4.3 соединены через блок 5.3 ФМ с третьими и четвертыми выходами блока 5.1 ФСЧ. Выход блока 5.4 ККО соединен через пороговое устройство (ПУ) 5.5 принятия решения о наличии сигнала и измерении временной задержки. ПУ 5.5 выполнено в виде вычислителя обобщенного показателя из выражения (8).
В(k), k€{1…Kmax},
где В(k) - функция взаимной корреляции сигналов от одного ИРИ;
k, Kmax - номер отсчета и его максимальное значение, соответствующее максимально возможному временному рассогласованию сигналов 4.1, 4.2, 4.3.
Выход ПУ 5 по найденным значениям задержек τ1, τ2, τ3 между сигналами 4.1, 4.2, 4.3 бортов КА соединен с входом модуля 6 расчета пространственных координат (РПК) ЛА - носителя ИРИ 7. Определение пространственного местоположения объекта ЛА осуществляется в модуле РПК 6 в рамках известной теории [5] по измеренным с высокой точностью задержкам сигнала τ1, τ2, τ3, известному текущему пространственному местоположению приемников 1, 2, 3, расстоянию между приемниками и известной скорости распространения электромагнитных волн.
Наземно-космическая система, реализующая заявленный разностно-дальномерный способ измерения пространственных координат движущихся воздушных объектов - ЛА, по сигналам радиоизлучения их бортового радиоэлектронного оборудования, работает следующим образом.
Частотное сканирование и пеленгация ЛА - носителей ИРИ 7 - с бортов 8 КА осуществляется одновременно тремя разнесенными разведывательными приемниками 1, 2, 3 баллистически связанной группировки КА. Приемники 1, 2, 3 синхронно в соответствии с заданной программой сканирования последовательно во всей частотной полосе контроля преобразуют небольшие участки спектра (полоса мгновенного анализа определяется адаптивно) к цифровому виду и через модуль 4 связи и синхронизации ретранслируют их на единый модуль 5 корреляционного измерения разности временной задержки радиосигналов ИРИ 7 между бортами 8 КА. В модуле 5 блок ЧФК 5.1 оценивает среднюю частоту анализируемого участка частотного сканирования, определяет максимальное Fm текущее значение доплеровского сдвига полосы сканирования из выражений (1-3). Найденное значение Fm используется далее в блоке ФСЧ 5.2 для расчета сетки частот сдвига  с дискретностью - 1 кГц, где n определяется максимальным значением доплеровского сдвига для измеренной несущей частоты сигнала. При этом
с дискретностью - 1 кГц, где n определяется максимальным значением доплеровского сдвига для измеренной несущей частоты сигнала. При этом  а
а  Далее эта сетка частот передается на блок ФМ 5.3 формирования массивов сигнальных данных 4.1 и 4.2 приемников 2 и 3 соответственно, сдвинутых по частоте относительно сигнальных данных 4.1 приемника 1. Для непрерывных сигналов блок ФМ 5.3 создает n массивов, содержащих блоки данных, представляющих собой квадратурные отсчеты, принятые со второго канала и сдвинутые по частоте на величины
Далее эта сетка частот передается на блок ФМ 5.3 формирования массивов сигнальных данных 4.1 и 4.2 приемников 2 и 3 соответственно, сдвинутых по частоте относительно сигнальных данных 4.1 приемника 1. Для непрерывных сигналов блок ФМ 5.3 создает n массивов, содержащих блоки данных, представляющих собой квадратурные отсчеты, принятые со второго канала и сдвинутые по частоте на величины  Массив текущих сигнальных данных 4.1 с блока ФСЧ 5.1 и массив сдвинутых по частоте сигнальных данных 4.2 и 4.3 с блока ФМ 5.3 передается на блок ККО 5.4 для корреляционной обработки двумя квадратурными каналами I и Q [5]. Обработка сигналов каналами I и Q, сдвинутыми по фазе на 90°, исключает потерю полезного сигнала за счет незнания его начальной фазы. Если полезный сигнал не создает эффекта в первом канале, то за счет сдвига фаз он даст приращение корреляционного интеграла во втором квадратурном канале. Поэтому при наличии двух квадратурных каналов результат обработки не зависит от случайной фазы. Это позволяет восстановить корреляционную зависимость сигналов, принятых от одного источника с различными начальными фазами. В результате последовательного временного сдвига сигналов 4.1, 4.2 и 4.3 относительно друг друга с частотой 1 кГц (шаг сдвига 1 мс) и совпадения амплитудно-частотных характеристик (АЧХ) сигналов различных каналов вырабатывается увеличенный сигнал совпадения их АЧХ (взаимная корреляционная функция - В). Одновременно фиксируется ее временное положение по моменту отсчета В и известному шагу сдвига. Решение о наличии сигнала в анализируемой выборке и времени задержки принимается далее в блоке 5.5 на основе сравнения В с порогом шумов по всем блокам данных. При превышении численного значения В порогового значения обработки ПУ 5.5 выдает на модуль 6 данные значений относительных временных задержек {τ1, τ2, τ3} сигналов ИРИ 7 между бортами 8 КА. Определение пространственных координат ЛА - носителя ИРИ 7 - осуществляется в расчетном модуле 6 рамках известной теории [5] по измеренным с высокой точностью задержкам сигналов {τ1, τ2, τ3}, известному текущему пространственному местоположению приемников 1, 2, 3, расстоянию между приемниками и известной скорости распространения электромагнитных волн.
Массив текущих сигнальных данных 4.1 с блока ФСЧ 5.1 и массив сдвинутых по частоте сигнальных данных 4.2 и 4.3 с блока ФМ 5.3 передается на блок ККО 5.4 для корреляционной обработки двумя квадратурными каналами I и Q [5]. Обработка сигналов каналами I и Q, сдвинутыми по фазе на 90°, исключает потерю полезного сигнала за счет незнания его начальной фазы. Если полезный сигнал не создает эффекта в первом канале, то за счет сдвига фаз он даст приращение корреляционного интеграла во втором квадратурном канале. Поэтому при наличии двух квадратурных каналов результат обработки не зависит от случайной фазы. Это позволяет восстановить корреляционную зависимость сигналов, принятых от одного источника с различными начальными фазами. В результате последовательного временного сдвига сигналов 4.1, 4.2 и 4.3 относительно друг друга с частотой 1 кГц (шаг сдвига 1 мс) и совпадения амплитудно-частотных характеристик (АЧХ) сигналов различных каналов вырабатывается увеличенный сигнал совпадения их АЧХ (взаимная корреляционная функция - В). Одновременно фиксируется ее временное положение по моменту отсчета В и известному шагу сдвига. Решение о наличии сигнала в анализируемой выборке и времени задержки принимается далее в блоке 5.5 на основе сравнения В с порогом шумов по всем блокам данных. При превышении численного значения В порогового значения обработки ПУ 5.5 выдает на модуль 6 данные значений относительных временных задержек {τ1, τ2, τ3} сигналов ИРИ 7 между бортами 8 КА. Определение пространственных координат ЛА - носителя ИРИ 7 - осуществляется в расчетном модуле 6 рамках известной теории [5] по измеренным с высокой точностью задержкам сигналов {τ1, τ2, τ3}, известному текущему пространственному местоположению приемников 1, 2, 3, расстоянию между приемниками и известной скорости распространения электромагнитных волн.
Таким образом, предлагаемый способ и система, его реализующая, позволяют расширить типовой состав принимаемых и обрабатываемых сигналов, а также повысить минимальное соотношение сигнал/шум за счет корреляционного накопления. В результате этого повышается точность определения координат высокомобильных воздушных объектов и одновременно расширяется класс обслуживаемых воздушных объектов.
Источники информации
1. Станция радиотехнической разведки. Патент РФ №2275746, МПК G01S 7/28, 13/32, опубл. 27.04.2006.
2. Сайбель А.Г., Гришин П.С. Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство. Патент РФ №2309420, МПК G01S 3/46, опубликован 27.10.2007.
3. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981.
4. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - М.: Мир, 1978.
5. Ширман Я.Д. Теоретические основы радиолокации. Учеб. пособие для вузов. М.: Сов. радио, 1970.
6. Отнес Р., Эноксон Л. Прикладной анализ временных рядов. - М.: Мир, 1982.
7. Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников радиоизлучений. - М.: Радиотехника, 2008. - 432 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2022 |
|
RU2798923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2516432C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2568104C1 |
| КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2674265C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2704793C1 |
Изобретение относится к радиотехнике и может быть использовано в разностно-дальномерных системах измерения пространственных координат летательных аппаратов. Достигаемый технический результат - повышение точности измерения координат летательного аппарата (ЛА) с одновременным расширением класса обслуживаемого бортового радиоэлектронного оборудования (БРО) ЛА как с импульсным, так и с непрерывным радиоизлучением. Указанный результат достигается тем, что частотную разведку и прием радиоизлучения БРО ЛА ведут радиоприемниками с низкоорбитальных космических аппаратов (КА). Принятые излучения преобразуют в цифровую форму и ретранслируют их совместно с текущими значениями пространственных координат КА с их борта по цифровой линии радиосвязи на наземную станцию обработки сигналов БРО ЛА. На наземной станции измеряют центральную частоту спектра сканирования радиосигналов ЛА, рассчитывают максимально возможное значение полосы доплеровского сдвига ее при встречном движении ЛА и КА. В найденной полосе частот с шагом единицы килогерц производят взаимную корреляционную обработку принятых радиосигналов ЛА одновременно двумя квадратурными каналами по каждой паре сигналов из группы радиосигналов ЛА. Сравнивают на каждом шаге численное значение взаимной корреляционной функции сигналов с пороговым значением и моменты превышения ее порогового значения принимают за истинное значение временного сдвига радиосигналов ЛА относительно текущих местоположений каждого КА. Далее измеренные корреляционным методом относительные задержки излучений БРО ЛА используют для высокоточного расчета пространственных координат ЛА разностно-дальномерным методом. 2 н.п. ф-лы, 4 ил.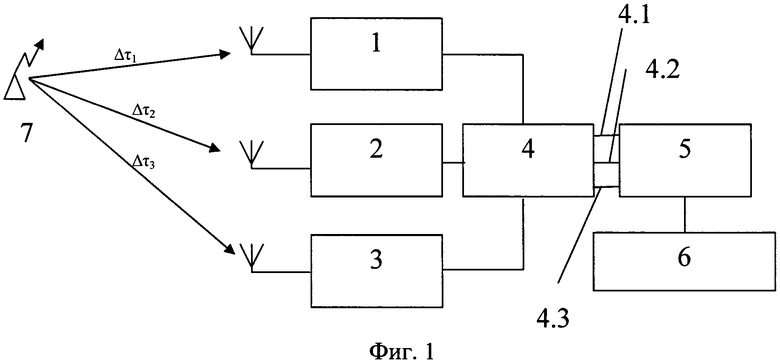
1. Разностно-дальномерный способ измерения пространственных координат летательных аппаратов по сигналам радиоизлучения их бортового радиоэлектронного оборудования, включающий прием радиосигналов летательного аппарата (ЛА) пространственно разнесенными радиоприемниками с известными пространственными координатами, измерение относительной задержки принятых радиосигналов разнесенными радиоприемниками и расчет пространственных координат ЛА по измеренным значениям относительных временных задержек радиосигналов ЛА на разнесенных радиоприемниках по известным значениям пространственных координат разнесенных радиоприемников и по известной скорости распространения радиоволн, отличающийся тем, что прием радиосигналов ЛА ведут радиоприемниками с низкоорбитальных космических аппаратов (КА), принятые радиосигналы преобразуют в цифровую форму и ретранслируют их совместно с текущими значениями пространственных координат КА с их борта по цифровой линии радиосвязи на наземный пункт обработки сигналов ЛА с бортов КА и дальнейшего расчета пространственных координат ЛА, причем в процессе измерения относительных временных задержек радиосигналов ЛА измеряют несущую частоту радиосигналов ЛА, рассчитывают максимально возможное значение полосы доплеровского сдвига ее при встречном движении ЛА и КА, в найденной полосе частот с шагом единицы килогерц производят взаимную корреляционную обработку принятых радиосигналов ЛА одновременно двумя квадратурными каналами по каждой паре сигналов из группы радиосигналов ЛА, сравнивают на каждом шаге численное значение взаимной корреляционной функции сигналов с пороговым значением и моменты превышения ее порогового значения принимают за истинное значение временного сдвига радиосигналов ЛА относительно текущих местоположений каждого КА, используемых далее для расчета пространственных координат ЛА.
2. Наземно-космическая система, реализующая способ по п. 1, содержит не менее трех радиоприемников, расположенных на разнесенных в пространстве низкоорбитальных космических аппаратах (КА), предназначенных для разведки и приема излучений бортового радиоэлектронного оборудования (БРО) ЛА и соединенных через модуль связи и синхронизации с наземной станцией обработки сигналов излучений БРО, включающей последовательно соединенные модуль корреляционного измерения временной задержки радиосигналов ЛА между бортами КА и модуль расчета пространственных координат ЛА по измеренным значениям временных задержек, известным значениям текущего пространственного положения радиоприемников, известным значениям их разноса на орбитах КА и по известной скорости распространения радиоволн, причем радиоприемники каждого КА выполнены с цифровым выходом, модуль связи и синхронизации выполнен в виде модемной широкополосной линии связи, модуль корреляционного измерения временной задержки радиосигналов содержит блок частотной и фазовой коррекции (ЧФК), первые выходы которого по максимально допустимым значениям частоты доплеровского сдвига сигналов соединены через блок формирования сетки частот (ФСЧ) сдвига с первыми входами блока формирования массивов (ФМ) сигналов второго и третьего приемных каналов, сдвинутых по частоте и времени относительно опорных сигналов первого приемного канала, вторые выходы блока ФСЧ по текущим значениям опорных сигналов соединены с первыми входами блока корреляционной квадратурной обработки (ККО) сигналов, вторые входы которого по задержанным сигналам второго и третьего каналов соединены через блок ФМ с третьими и четвертыми выходами блока ФСЧ, выход блока ККО соединен через пороговое устройство (ПУ) принятия решения о наличии сигналов БРО и регистрации их относительной временной задержки с выходом блока ФСЧ.
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2006 |
|
RU2309420C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2506605C2 |
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| JP 5730506 B2,10.06.2015 | |||
| JP 2009300284 A, 24.12.2009 | |||
| WO 2012107250 A1, 16.08.2012. | |||

