Изобретение относится к области общего машиностроения и может быть использовано, например, в маятникового типа манипуляторах, в качестве механизма, взводящего запирающие устройства маятника.
Автору не удалось обнаружить описания устройств, которые могли быть выбраны в качестве аналогов и прототипа. Задачей, которую решает автор, является создание механизма взведения, в котором взведение взводимого рычага маятника происходит через промежуточное звено, что расширяет возможности конструктивного исполнения механизма.
Задача решается тем, что этот механизм содержит взводимый рычаг и кулачок в виде кулачка с взводящей частью и с радиусной поверхностью, подпружиненный двуплечий рычаг, одно плечо которого кинематически связано с взводимым рычагом и имеет опорную поверхность, выполненную с возможностью взаимодействия с взводящей частью кулачка и его радиусной поверхностью, а другое плечо выполнено с радиусной поверхностью и имеет опорную площадку, выполненную с возможностью взаимодействия с радиусной поверхностью кулачка. Положение механизма взведения, когда плечо рычага, взводящее взводимый рычаг, взаимодействует с радиусной поверхностью кулачка, является исходным.
Радиусная поверхность кулачка является опорой для двуплечего рычага, который пружиной поворачивается до контакта с ней поверхности взаимодействия первого плеча.
Кроме того, радиусная поверхность кулачка является ограничителем угла поворота двуплечего рычага при активном его повороте кулачком, т.е. она (радиусная поверхность кулачка) предотвращает "заброс" двуплечего рычага (т. е. поворот его на угол, больше допустимого). Это обеспечивается скользящим контактом поверхности взаимодействия второго плеча двуплечего рычага с радиусной поверхностью кулачка.
И, кроме того, радиусная поверхность двуплечего рычага является поверхностью, на которую воздействует кулачок, заставляя двуплечий рычаг активнее поворачиваться к исходному положению, "помогая" пружине повернуть двуплечий рычаг до контакта поверхности взаимодействия первого плеча с радиусной поверхностью кулачка.
Центр радиусной поверхности кулачка совпадает с осью вращения его (кулачка).
На чертеже изображен механизм взведения с взведенным взводимым рычагом, контуром изображено исходное положение механизма взведения.
Механизм взведения содержит кулачок с взводящей частью 1 и с радиусной поверхностью 2 и двуплечий рычаг 3, установленные на основании 4, а также взводимый рычаг 5 маятника. На первом плече 6 двуплечего рычага 3, кинематически связанном с взводимым рычагом 5, выполнена опорная поверхность 7 для взаимодействия с взводящей частью 1 кулачка и его радиусной поверхностью 2. На втором плече 8 двуплечего рычага 3 выполнена радиусная поверхность 9, радиус которой, при исходном положении механизма взведения, совпадает с радиусом радиусной поверхности 2. Кроме того, на втором плече 8 имеется опорная площадка 10 для взаимодействия с радиусной поверхностью 2 кулачка, предотвращающая "заброс" двуплечего рычага 3 при слишком активном его повороте взводящей частью 1 кулачка. Возвращение двуплечего рычага 3 к исходному положению и фиксация его в исходном положении осуществляется пружиной 11.
Механизм взведения работает следующим образом. При повороте кулачка по часовой стрелке он (кулачок) своей взводящей частью 1 поворачивает двуплечий рычаг 3 на угол, определяемый поверхностью 7, положение которой выбрано из условия взведения взводимого рычага 5. При этом опорная площадка 10 двуплечего рычага 3 находится в непосредственной близости от радиусной поверхности 2 кулачка, тем самым предотвращая возможный поворот двуплечего рычага 3 на угол, больше допустимого, т.е. предотвращая "заброс" при активном повороте его взводящей частью 1 кулачка.
При неактивном повороте двуплечего рычага 3 кулачком контакта опорной площадки 10 с радиусной поверхностью 2 не происходит, т.к. усилие пружины 11 достаточно для предотвращения "заброса" и возвращения двуплечего рычага 3 в исходное положение. При этом взводящая часть 1 кулачка не взаимодействует с радиусной поверхностью 9 второго плеча.
Фиксация двуплечего рычага 3 в исходном положении при вращающемся кулачке обеспечивается пружиной 11 и скользящим контактом поверхности 7 по радиусной поверхности 2 кулачка.
Таким образом, использование в качестве механизма взведения данной схемы позволяет расширить возможности конструктивного исполнения устройства и за счет этого повысить надежность механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНТОВАТЕЛЬ | 2001 |
|
RU2189341C1 |
| Затвор для стрелкового оружия | 2017 |
|
RU2677165C1 |
| МЕХАНИЗМ МАЯТНИКОВОГО ПИТАЮЩЕГО УСТРОЙСТВА | 1999 |
|
RU2223432C2 |
| ДРОССЕЛЬНЫЙ КЛАПАН С АВТОМАТИЧЕСКИМ ОТКЛЮЧЕНИЕМ | 1993 |
|
RU2079027C1 |
| Пневматическое компрессионное оружие | 1989 |
|
SU1828992A1 |
| ДВУСТВОЛЬНОЕ МНОГОЗАРЯДНОЕ РУЖЬЕ | 2007 |
|
RU2358222C1 |
| Быстродействующий короткозамыкатель | 1989 |
|
SU1647682A1 |
| УСТРОЙСТВО для ЗАПИСИ НА ПЕРФОКАРТУ | 1972 |
|
SU354435A1 |
| Загрузочное устройство | 1990 |
|
SU1745507A1 |
| Пружинный привод высоковольтного выключателя | 1983 |
|
SU1136226A1 |
Изобретение относится к области общего машиностроения и может быть использовано, например, в маятникового типа манипуляторах в качестве механизма, взводящего запирающие устройства маятника. Механизм взведения содержит кулачок (1) с радиусной упорной поверхностью (2) и двуплечий рычаг (3), установленные на основании (4), а также взводимый рычаг (5). На первом плече (6) двуплечего рычага (3), кинематически связанном с взводящим рычагом (5), выполнена поверхность (7) для взаимодействия с кулачком (1) и его радиусной упорной поверхностью (2). На втором плече двуплечего рычага (3) выполнена радиусная поверхность (9), радиус которой, при исходном положении механизма взведения, совпадает с радиусом радиусной упорной поверхности (2). Кроме того, на втором плече (8) имеется поверхность (10) для взаимодействия с радиусной упорной поверхностью (2) кулачка (1), предотвращающая поворот двуплечего рычага (3) на угол, больший допустимого, при слишком активном его повороте кулачком (1). Возвращение двуплечего рычага (3) к исходному положению и фиксация его в исходном положении осуществляются пружиной (11). Технический результат изобретения - расширение возможностей конструктивного исполнения устройства и за счет этого - повышение надежности механизма. 1 ил.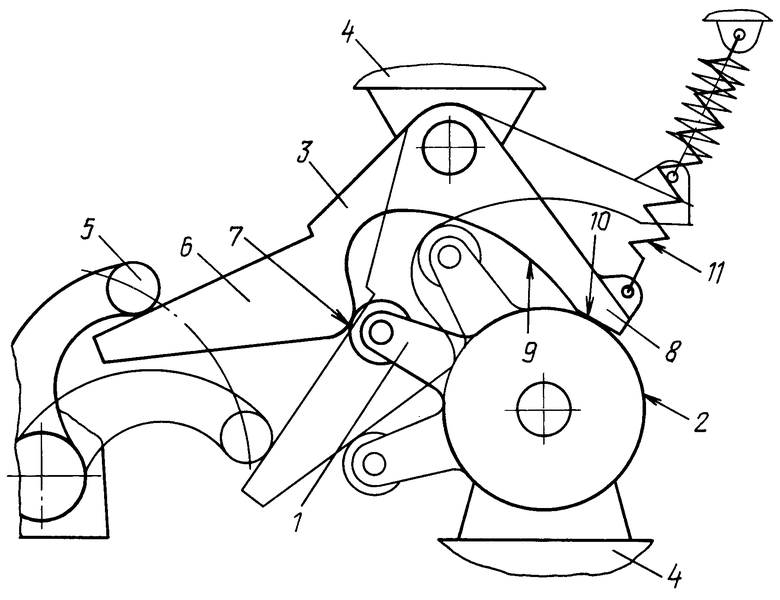
Механизм взведения, отличающийся тем, что он содержит взводимый рычаг и кулачок в виде кулачка с взводящей частью и с радиусной поверхностью, подпружиненный двуплечий рычаг, одно плечо которого кинематически связано с взводимым рычагом и имеет опорную поверхность, выполненную с возможностью взаимодействия с взводящей частью кулачка и его радиусной поверхностью, а другое плечо выполнено с радиусной поверхностью и имеет опорную площадку, выполненную с возможностью взаимодействия с радиусной поверхностью кулачка.
| RU 2075023 C1, 10.03.1997 | |||
| RU 2058519 C1, 20.04.1996 | |||
| МЕХАНИЗМ ВЗВЕДЕНИЯ ПРУЖИННОГО ПНЕВМАТИЧЕСКОГО ОРУЖИЯ | 1997 |
|
RU2120595C1 |
| Дисковая мельница | 1978 |
|
SU785404A1 |
| КЛАПАН С ЭЛЕКТРОМАГНИТНЫМ ДВУХПОЗИЦИОННЫМ ПРИВОДОМ | 2011 |
|
RU2517002C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДЕМОНТАЖА И МОНТАЖА КОЛЬЦЕВОГО БАНДАЖА | 2014 |
|
RU2671394C1 |
| US 4523509, 18.06.1985 | |||
| DE 3914538 A1, 08.11.1990. | |||

