Изобретение относится к машиностроению, в частности к автоматическим транс- портно-загрузочным устройствам станков и автоматических линий.
Целью изобретения является упрощение конструкции и повышение надежности устройства в работе за счет сокращения элементов кинематической связи.
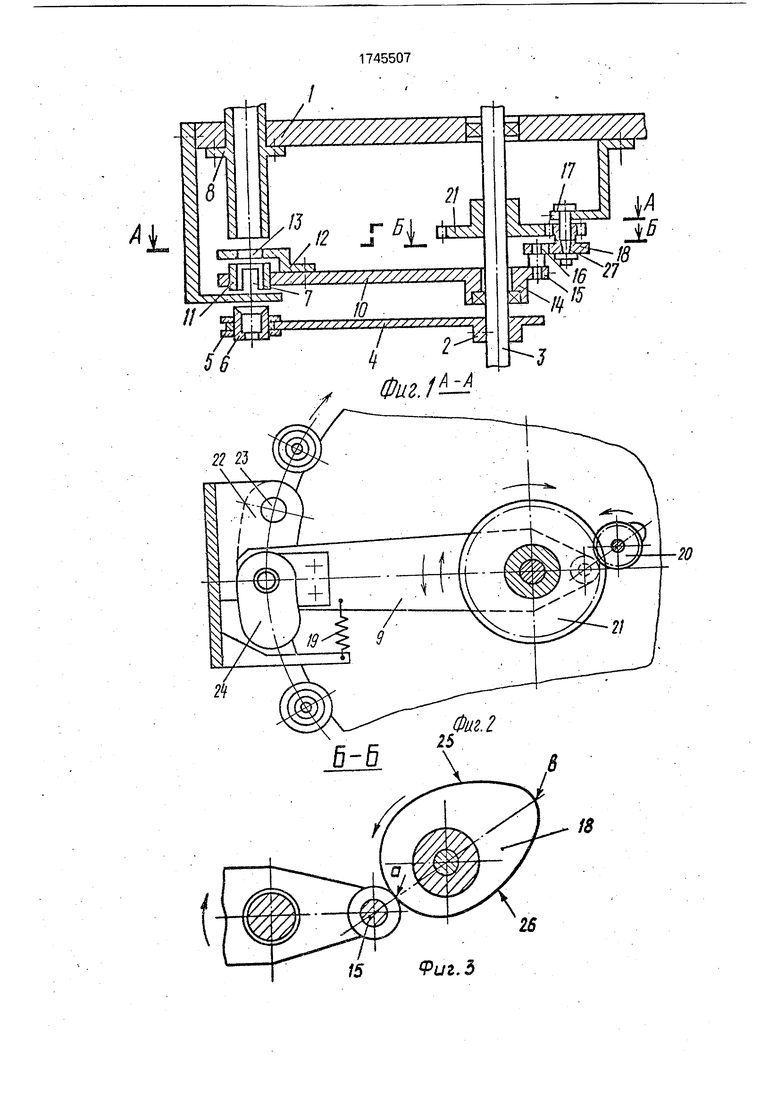
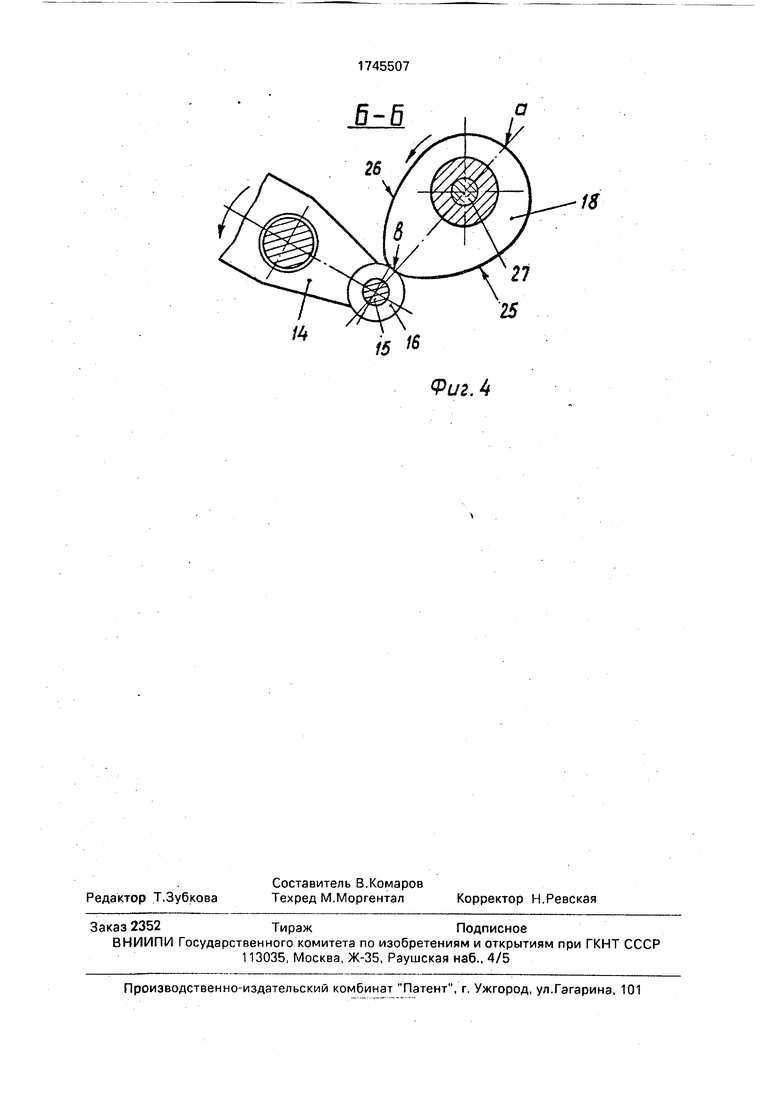
На фиг.1 изображено предлагаемое устройство, общий вид, разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1, исходное положение промежуточного приемника; на фиг.4 - то же, положение возврата промежуточного приемника. , . Устройство содержит основание 1, ро- тор 2, имеющий вал 3, установленный в основании 1, привод вращения вала 3 ротора
2(на фиг. не показан), закрепленную на валу
3звездочку 4 и транспортную цепь 5 с носителями (гнезда) 6 деталей 7. Вертикальный магазин 8 закреплен на основании 1 в позиции загрузки и расположен над ротором 2 на траектории перемещения транспортной цепи 5 с носителями 6. Промежуточный приемник выполнен в виде двуплечего рычага 9, на одном плече 10 которого закреплены приемная втулка 11 захвата, расположенная на траектории перемещения транспортной цепи 5 с носителями 6, и кронштейн 12 с окном 13, соосн-ым приемной втулке 11, а на другом плече 14 двуплечего рычага 9 закреплена ось 15с роликом 16. На основании 1 по периферии ротора 2 закреплена ось 17, на которой установлен профильный кулачок 18с возможностью взаимодействия с роликом 16. Промежуточный приемник установлен над звездочкой 4 ротора 2 на валу 3 с возможностью поворота относительно вертикального магазина 8 и постоянно прижат роликом 16 к профильному кулачку 18 пружиной 19. С профильным кулачком 18 соос- но закреплена шестерня 20, кинематически
VJ
1
сл ел о
х|
связанная с шестерней 21,закрепленной на валу 3. На основании 1 между промежуточным приемником и звездочкой 4 ротора 2 закреплена опорная площадка 22 для деталей 7 с окном 23, расположенным на траектории перемещения транспортной цепи 5 на некотором углу от исходного положения промежуточного приемника в сторону его движения от исходного положения. Кронштейн 12 имеет опорную поверхность 24 для деталей 7, расположенную по отношению к окну 13 в сторону, противоположную движению промежуточного приемника от исходного положения.
Профиль кулачка 18 выполнен без крутых перегибов так, чтобы угол давления (при любом положении кулачка 18 и промежуточного приемника 9) между ним и роликом 16 плеча 14 приемника не превышал предельного, т.е. чтобы не происходило заклинивания системы.
Ролик 16 промежуточного приемника постоянно находится в контакте с профилем кулачка 18 под воздействием пружины 19. В исходном положении промежуточного при- емн -а (фиг.З) контактирование происходит, например, в точке а. Участок 25 профиля кулачка 18 между точкой а и произвольной точкой в имеет подъем кривой, обеспечивающий кинематически, при повороте кулачка на величину цент рального угла между точками а и в (на фиг 3, 4 условно угол принят равным 180°), поворот промежуточного приемника до положения, когда втулка 11 с деталью 7 станет соосной с отверстием площадки 22 и носителем б цепи 5, т.е. на угол расположения окна 23 опорной площадки 22 относительно исходного положения промежуточного приемника 9. Точность совмещения зависит от кинематической связи ротора с кулачком 18, соотношения плеч промежуточного приемника 9 и величины подъема участка профиля 25 кулачка 18 между точками а и в.
Участок 26 профиля кулачка 18 между точками в и а (фиг.4) выполнен с убывающим по радиусу переменным профилем и при дальнейшем повороте кулачка 18 возвращает промежуточный приемник 9 в исходное положение.
Для установки промежуточного приемника и профильного кулачка в исходное положение профильный кулачок установлен, например, посредством конического соединения с хвостовиком 27 оси 17, а для плавности хода и удобства регулирования исходного положения профиль кулачка на
участке 25 может быть выполнен по спирали Архимеда.
Загрузочное устройство работает следующим образом.
Детали 7 из вертикального магазина 8
отсекателем (на фиг. не показан) поштучно через окно 13 кронштейна 12 подаются в приемную втулку 11 промежуточного приемника и опираются нижним торцом на
опорную площадку 22. В исходном положении промежуточный приемник (роликом 16) поджат пружиной 19 к профильному кулачку 18 с контактом в точке а, и носитель 6 расположен, например, соосно приемной
втулке 11.
Во время вращения вала 3 благодаря кинематической связи шестерен 20 и 21 вращается и профильный кулачок 18. От воздействия на ролик 16 набегающего участка 25
профиля кулачка 18 будет поворачиваться и рычаг 9 с деталью 7, которая при этом скользит по опорной площадке 22.
При повороте носителя б с транспортной цепью 5 на угол расположения окна 23
опорной площадки 22 (в то же время кулачок 18 повернет на этот же угол и промежуточный приемник с втулкой 11 и деталью 7) деталь проваливается через окно 23 в носитель б транспортной цепи 5. При дальнейшем повороте кулачка 18 двуплечий рычаг 9 пружиной 19 стремится вернуться в исходное положение. Прижатый к убывающему по радиусу переменному участку 26 профиля профильного кулачка 18 рычаг 9 поворачивается в обратном направлении, плавно приближаясь к исходному положению. Формула изобретения Загрузочное устройство, содержащее основание, установленный на валу ротор, на
диске которого равномерно по окружности размещены гнезда под детали, вертикальный магазин, расположенный над ротором в позиции загрузки, промежуточный приемник, расположенный между магазином и ротором и выполненный в виде двуплечего рычага, на одном плече которого размещен захват, установленный с возможностью поворота вокруг оси ротора посредством кулачка, кинематически связанного с валом
ротора, опорную площадку с окном, закрепленную под промежуточным приемником, отл ичающееся тем, что, с целью упрощения конструкции и повышения надежности устройства в работе, рабочий
профиль кулачка выполнен в виде двух выпуклых криволинейных поверхностей, сопряженных в плоскости, проходящей перпендикулярно оси вала ротора.
У//////////// ////)(///,
11
ътш
S
ттштгА
//////// ////)(///,
Т
ir «а
ZI
УЩ
ЈГ
S
тштгА
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1987 |
|
SU1423345A1 |
| Загрузочное устройство | 1987 |
|
SU1484576A2 |
| Загрузочное устройство | 1991 |
|
SU1815134A1 |
| Автомат сборки внутренних звеньев втулочнороликовых цепей | 1981 |
|
SU958034A1 |
| Загрузочный ротор | 1989 |
|
SU1646783A1 |
| Установка для дробеструйной обработки полых цилиндрических изделий | 1986 |
|
SU1366376A1 |
| Загрузочный ротор | 1990 |
|
SU1780988A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| КИНОПРОЕКТОР | 1971 |
|
SU301006A1 |
| Роторный автомат питания | 1987 |
|
SU1516305A1 |
Использование: в машиностроении, в частности в автоматических транспортно- загрузочных устройствах станков и автоматических линий. Сущность изобретения: детали 7 из магазина 8 поштучно подаются в приемную втулку 11 промежуточного приемника и опираются нижним торцом на опорную площадку. Во время вращения вала 3 за счет кинематической связи шестерен 20 и 21 вращается и профильный кулачок 18. От воздействия на ролик 16 набегающего участка будет поворачиваться и рычаг 9 с деталью 7, которая скользит по опорной площадке. При повороте носителя с транспортной цепью 5 на угол расположения окна опорной площадки (в то же время кулачок 18 повернет на этот же угол и промежуточный приемник со втулкой 11 и деталью 7) деталь западает в носитель 6 транспортной цепи 5. При дальнейшем повороте кулачка 18 двуплечий рычаг 9 пружиной стремится вернуться в исходное положение. 4 ил.
/
iOGGfriL
Фш.4
| Загрузочное устройство | 1987 |
|
SU1423345A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
