Настоящее изобретение относится к виброизолирующим системам, предназначенным для ограничения передачи выделяемой извне энергии колебаний и ударов механически чувствительным элементам. В частности, настоящее изобретение представляет собой виброизолирующую систему, предназначенную для крепления корпуса для комплекта инерциальных приборов к опоре, которая подвергается воздействию удара и колебаний. В виброизолирующей системе используется один, выполненный за одно целое, эластомерный элемент для поглощения и демпфирования энергии удара и колебаний.
При определенных условиях окружающей среды необходимо изолировать комплекты механически чувствительных датчиков от энергии удара и колебаний. Во многих случаях применения это осуществляется путем размещения комплекта датчиков и других необходимых элементов внутри контейнера или корпуса (кожуха) некоторого типа. Часто используются упругие, поглощающие удар и колебания монтажные опоры для ограничения передачи генерируемой извне энергии колебаний и удара в корпус, содержащий блок датчиков.
Необходимость изолировать блок датчиков от улара и колебаний является особенно острой в том случае, когда блок датчиков представляет собой блок (комплект) инерциальных датчиков (ISA - inertial sensor assembly), который также известен как инерциальное измерительное устройство (IMU - inertial measurement unit). Блок инерциальных датчиков, как правило, включает в себя инерциальные датчики, такие как акселерометры и кольцевые лазерные гироскопы. Обычно имеются три акселерометра и три гироскопа, установленные при определенном взаимном расположении их входных осей. Датчики, как правило, неподвижно и точно прикреплены к основанию для датчиков, которое, в свою очередь, точно установлено внутри корпуса наряду с соответствующими электронными схемами и аппаратными средствами. Обычно корпус, в свою очередь, прикреплен к опоре или шасси с помощью подвесок или виброизоляторов. В свою очередь, шасси жестко и точно прикреплено к раме транспортного средства, такого как воздушное судно.
В процессе работы датчики выдают данные об инерциальных характеристиках, такие как информация о линейном и угловом ускорении, навигационному компьютеру на борту воздушного судна. Навигационный компьютер обрабатывает указанную информацию для управления полетом и/или для навигации воздушного судна. Для обеспечения оптимальной работы датчики из блока инерциальных датчиков должны выдавать точные данные об инерциальных характеристиках навигационному компьютеру. Маневры воздушного судна (то есть ускорение, изменения тангажа, крена и рыскания, взлет и посадка), турбулентность и работа двигателей - все эти факторы приводят к выделению энергии удара и колебаний, которая передается через раму воздушного судна опоре для блока инерциальных датчиков. Эта энергия удара и колебаний может проявляться в виде погрешностей линейного или углового ускорения в данных об инерциальных характеристиках, выдаваемых датчиками навигационному компьютеру. Следовательно, существует необходимость в обеспечении изоляции от удара и виброизоляции блока инерциальных датчиков, которая осуществляется виброизолятором.
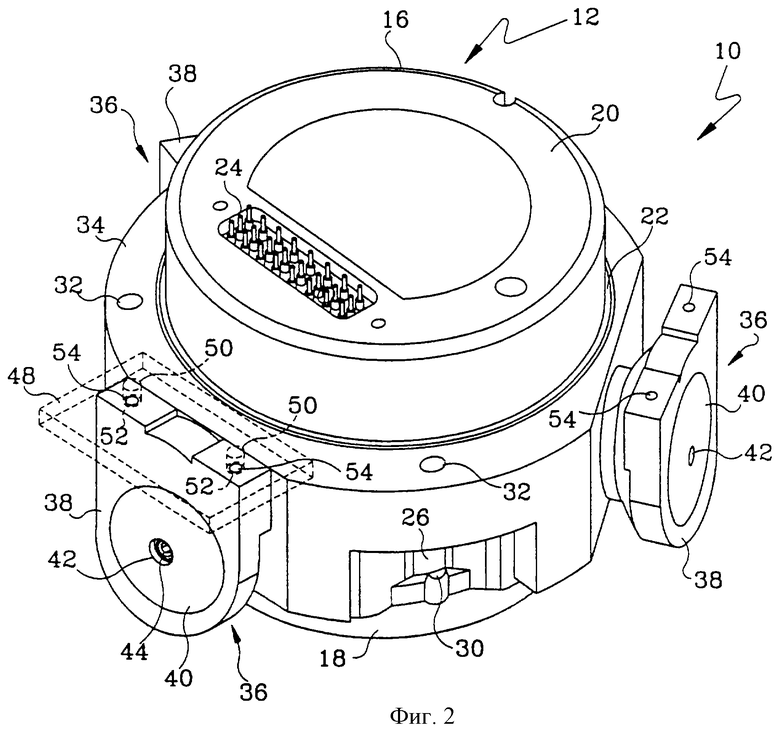
Одна подобная известная виброизолирующая система 10 для блока 12 инерциальных датчиков изображена на фиг.1 и 2. Блок 12 инерциальных датчиков включает в себя инерциальные датчики 14, установленные внутри корпуса 16, образованного базовым элементом 18 и закрывающим элементом 20, которые герметично соединены вместе с помощью уплотнительного кольца 22 известным в данной области образом. Инерциальные датчики 14 образованы тремя акселерометрами и тремя кольцевыми лазерными гироскопами и соответствующими им электронными схемами и аппаратными средствами, как в целом известно в данной области. Электрический разъем 24, смонтированный в закрывающем элементе 20, обеспечивает возможность передачи данных об инерциальных характеристиках между инерциальными датчиками 14 и навигационным компьютером (непоказанным) на борту воздушного судна.
Базовый элемент 18 корпуса 16 имеет три монтажные бобышки 26 (на фиг.1 можно видеть только две из них), расположенные на одинаковом расстоянии друг от друга по окружности базового элемента 18. Каждая монтажная бобышка 26 имеет отверстие 28, предназначенное для приема резьбовой крепежной детали 30. Крепежные детали 30 входят в контакт со взаимодействующими с ними резьбовыми отверстиями 32 инерционного кольца 34 для обеспечения жесткого крепления блока 12 инерциальных датчиков к инерционному кольцу 34.
Как лучше всего видно на фиг.1, виброизолирующая система 10 включает в себя три изолирующие опоры 36. Каждая изолирующая опора 36 имеет наружную раму 38, предназначенную для удерживания эластомерного элемента 40, который придает изолирующей опоре 36 функциональные свойства, обеспечивающие изоляцию от удара и виброизоляцию. Эластомерный элемент 40 представляет собой торообразный элемент, который получен литьем под давлением с одновременной установкой его в наружной раме 38 и на элементе 42 с внутренним отверстием, используя типовые процессы литья под давлением, в целом известные в данной области. Эластомерный материал представляет собой фенилметилвиниловый силоксан типа 2FC303A19B37E016F1-11G11, как определено в документе Американского общества по испытанию материалов ASTM-D2000. Силиконовые материалы данного типа изготавливаются многочисленными производителями для различных соответствующих случаев применения. Элемент 42 с внутренним отверстием каждого эластомерного элемента 40 предназначен для приема резьбовой крепежной детали 44. Каждая резьбовая крепежная деталь 44 входит во взаимодействующее с ней резьбовое отверстие 46 в инерционном кольце 34 для крепления эластомерного элемента 40 соответствующей изолирующей опоры 36 к инерционному кольцу 34, прикрепленному к блоку 12 инерциальных датчиков. Как лучше всего видно на фиг.1, изолирующие опоры 36 расположены на одинаковых расстояниях друг от друга вокруг инерционного кольца 34. Как лучше всего видно на фиг.2, наружные рамы 38 изолирующих опор 36 прикреплены к опоре 48 (показанной пунктирными линиями и только частично показанной по отношению к одной из изолирующих опор 36 для ясности) посредством резьбовых крепежных деталей 50. Крепежные детали 50 проходят через отверстия 52 опоры 48 для входа в контакт с резьбовыми отверстиями 54 наружных рам 38 изолирующих опор 36.
Несмотря на то, что изолирующие опоры 36 виброизолирующей системы 10 обеспечивают надлежащую изоляцию блока 12 инерциальных датчиков от энергии удара и колебаний, передаваемой через опору 48, существует ряд проблем, связанных с использованием многочисленных отдельных (дискретных) изолирующих опор. Например, при использовании многочисленных отдельных изолирующих опор необходимо согласовывать собственные частоты изолирующих опор, подлежащих использованию с заданным блоком инерциальных датчиков. Другими словами, поскольку согласование собственных частот обычно требуется на уровне интегрирования блока инерциальных датчиков, каждую отдельную изолирующую опору необходимо испытать, выделить и отмаркировать в соответствии с ее собственной частотой и коэффициентом усиления. Разделенные изолирующие опоры затем упаковывают как согласованные комплекты для установки с заданным блоком инерциальных датчиков. Если одна изолирующая опора из согласованного комплекта будет повреждена или утеряна во время процесса сборки, весь согласованный комплект должен быть выброшен в отходы, поскольку при несогласованных опорах возможно некомпенсируемое смещение блока инерциальных датчиков, которое приведет к погрешностям данных об инерциальных характеристиках.
Другая проблема, связанная с использованием многочисленных отдельных изолирующих опор, возникает из-за того, что отдельные опоры закреплены в различных местах вокруг блока инерциальных датчиков. Необходимо обратить особое внимание на точную установку и совмещение центра тяжести блока инерциальных датчиков с центрами упругости изолирующих опор (выставление центра тяжести блока инерциальных датчиков относительно центров упругости изолирующих опор). В противном случае смещения центра тяжести и центров упругости друг относительно друга могут привести к некомпенсируемым качательным движениям и прецессиям в блоке инерциальных датчиков, которые будут проявляться в погрешностях данных об инерциальных характеристиках. Следовательно, системы многочисленных отдельных изолирующих опор сложны в изготовлении и вследствие этого дороги.
Существует необходимость в усовершенствованных виброизолирующих системах для блоков инерциальных датчиков. В частности, существует необходимость в виброизолирующей системе, которая устраняет потребность в согласовании естественных частот многочисленных изолирующих опор и при этом обеспечивает приемлемую изоляцию блока инерциальных датчиков от ударов и вибрации. Кроме того, необходимо обеспечить возможность сравнительно легкого совмещения центра упругости виброизолирующей системы с центром тяжести блока инерциальных датчиков. И в завершение, виброизолирующая система должна быть сравнительно простой и недорогой в изготовлении.
Настоящее изобретение представляет собой виброизолирующую систему, предназначенную для крепления блока инерциальных датчиков к опоре, которая подвергается воздействию удара и вибрации. Виброизолирующая система включает в себя кольцеобразный эластомерный элемент, жесткий кольцеобразный наружный элемент и жесткий кольцеобразный внутренний элемент. Наружный элемент охватывает по окружности эластомерный элемент и зафиксирован относительно него. Кроме того, наружный элемент прикреплен к опоре. Внутренний элемент охвачен по окружности эластомерным элементом и зафиксирован относительно эластомерного элемента. Кроме того, внутренний элемент прикреплен к блоку инерциальных датчиков таким образом, что эластомерный элемент изолирует блок инерциальных датчиков от удара и колебаний, которые в противном случае могли бы передаваться от опоры к блоку инерциальных датчиков. Виброизолирующая система устраняет необходимость согласования естественных частот многочисленных изолирующих опор, поскольку используется только один эластомерный элемент. Кроме того, поскольку имеется только один эластомерный элемент, сравнительно легко совместить центр упругости эластомерного элемента с центром тяжести блока инерциальных датчиков. Виброизолирующая система обеспечивает улучшенную изоляцию от удара и виброизоляцию блока инерциальных датчиков и сравнительно проста и недорога в изготовлении.
Краткое описание чертежей
Фиг. 1 представляет собой перспективное изображение с пространственным разделением элементов виброизолирующей системы для блока инерциальных датчиков, которая известна специалистам в данной области.
Фиг. 2 представляет собой перспективное изображение известной виброизолирующей системы, изображенной на фиг.1, в собранном виде.
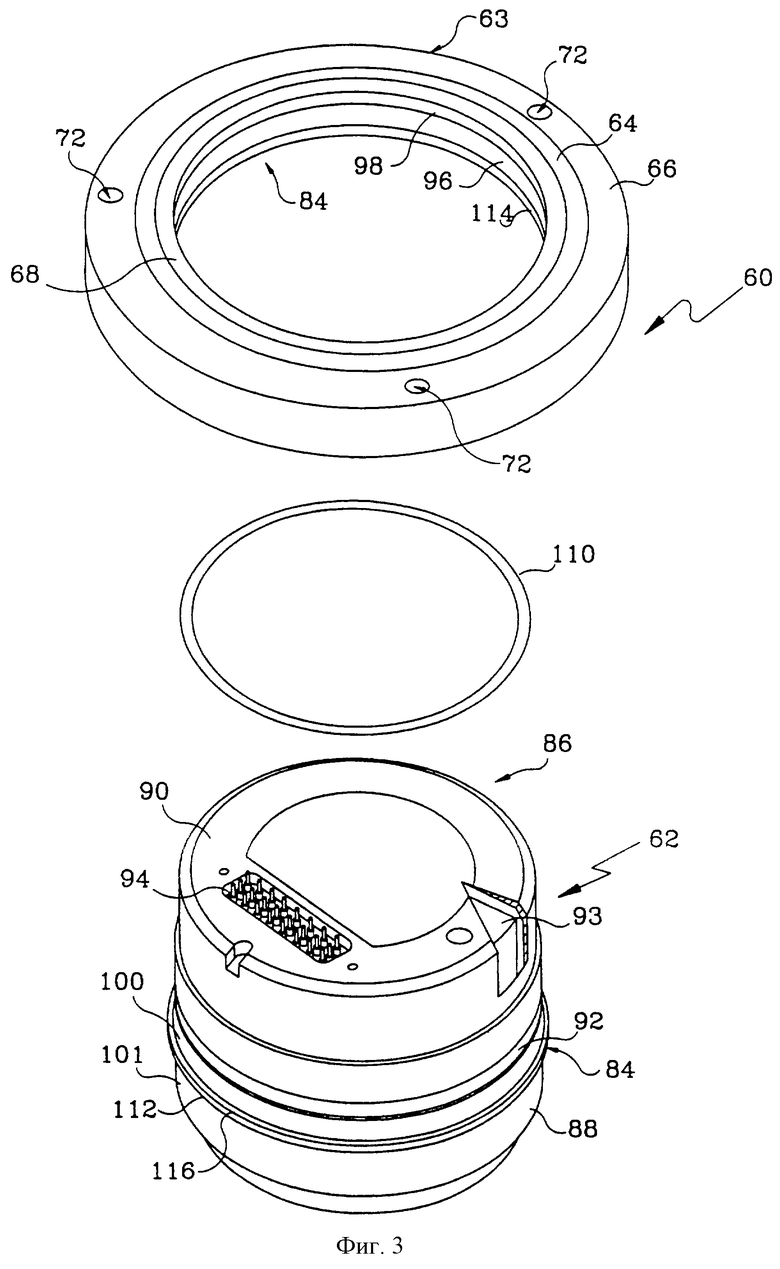
Фиг. 3 представляет собой перспективное изображение с пространственным разделением элементов виброизолирующей системы для блока инерциальных датчиков согласно настоящему изобретению.
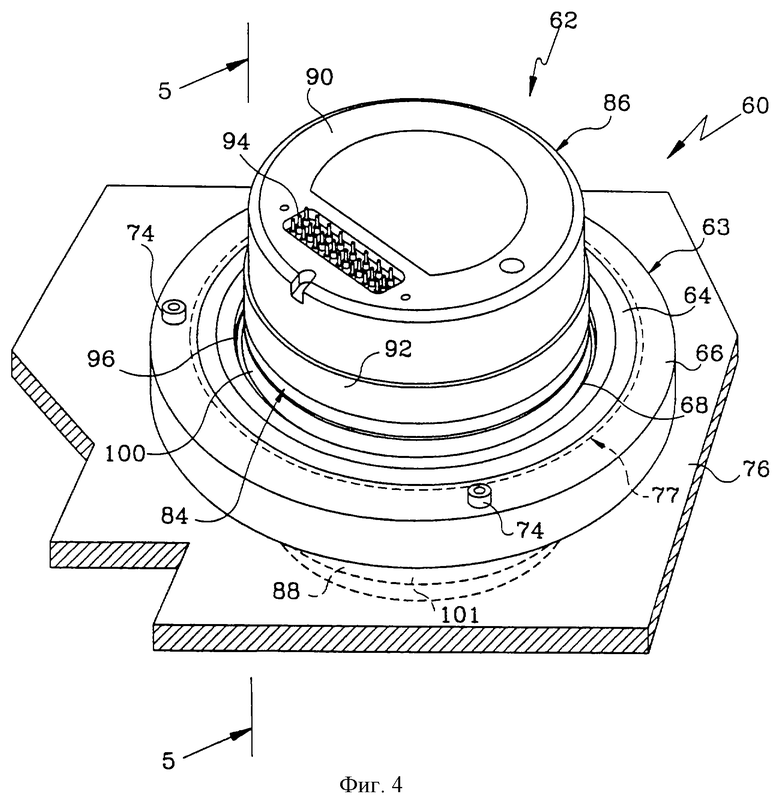
Фиг.4 представляет собой перспективное изображение виброизолирующей системы, изображенной на фиг.3, в собранном виде.
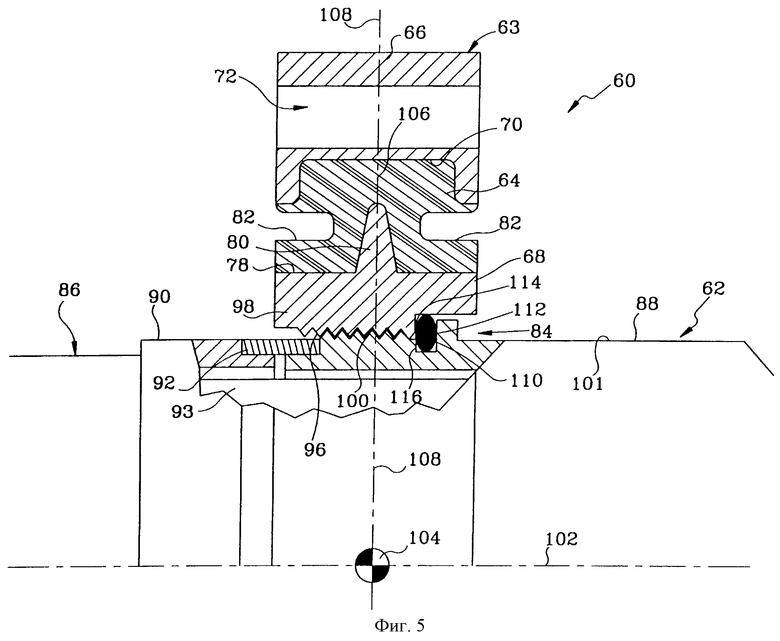
Фиг. 5 представляет собой частичное сечение виброизолирующей системы, выполненное по линии 5-5 на фиг.4, причем резьбовая крепежная деталь и опора для ясности удалены.
Подробное описание предпочтительных вариантов осуществления
Виброизолирующая система 60 для блока 62 инерциальных датчиков согласно настоящему изобретению представлена в основном на фиг.3-5. Как видно из фиг. 3 и 5, виброизолирующая система 60 включает в себя изолирующую опору 63, образованную кольцеобразным эластомерным элементом 64, жестким кольцеобразным наружным элементом 66 и жестким кольцеобразным внутренним элементом 68. Наружный элемент 66 охватывает по окружности эластомерный элемент 64 и концентричен с ним. Как лучше всего видно на фиг.5, внутренняя боковая стенка 70 наружного элемента 66 имеет форму паза для обеспечения наличия надлежащей площади поверхности, чтобы зафиксировать эластомерный элемент 64 относительно наружного элемента 66. Наружный элемент 66 также имеет три отверстия 72, расположенные на одинаковых расстояниях друг от друга (то есть через 120o по окружности) вокруг периферии наружного элемента 66. Как видно на фиг. 4, отверстия 72 предназначены для приема резьбовой крепежной детали 74 (на фиг.4 можно видеть только две из этих деталей). Резьбовые крепежные детали 74 входят в резьбовые отверстия (не показанные) в опоре 76, которая подвергается воздействию удара и вибрации. Опора 76 имеет отверстие 77, предназначенное для свободной вставки блока 62 инерциальных датчиков через него. Опора 76 представляет собой часть транспортного средства. В одном предпочтительном варианте осуществления опора 76 представляет собой шасси, прикрепленное к раме воздушного судна.
Как видно из фиг. 3 и 5, внутренний элемент 68 охвачен по окружности эластомерным элементом 64 и концентричен с ним. Как лучше всего видно из фиг. 5, наружная боковая стенка 78 внутреннего элемента 68 имеет проходящую радиально наружу выступающую часть 80, которая увеличивает площадь поверхности наружной боковой стенки 78, используемую для фиксации эластомерного элемента 64 относительно внутреннего элемента 68. Эластомерный элемент 64 имеет зоны 82 выемок, которые концентричны соответственно с наружным и внутренним элементами 66 и 68. Зоны 82 выемок придают эластомерному элементу 64 некоторую податливость (гибкость), которая способствует демпфированию и поглощению нежелательной энергии удара и колебаний, передаваемой опорой 76.
В одном предпочтительном варианте осуществления эластомерный элемент 64 изготовлен из фенилметилвинилсилоксанового каучука типа 2FC303A19B37E016F1-11G11, как определено в документе Американского общества по испытанию материалов ASTM-D2000. Силиконовые материалы данного типа изготавливаются многочисленными производителями для различных соответствующих случаев применения. Наружный и внутренний элементы, обозначенные соответственно 66 и 68, изготовлены из алюминиевого сплава. В одном предпочтительном варианте осуществления эластомерный материал, представляющий собой силоксановый каучук, заливают методом впрыска при высокой температуре и под высоким давлением в полость между наружным и внутренним элементами, обозначенными соответственно 66 и 68. Силоксановый каучук приклеивается к металлическим поверхностям наружного и внутреннего колец, обозначенных соответственно 66 и 68, и удерживает виброизолирующую систему 60 в виде одного целого (вместе). Силоксановый каучук придает виброизолирующей системе 60 основные функциональные свойства, обеспечивающие изоляцию/демпфирование.
Как видно из фиг.3-5, соединительное устройство 84 обеспечивает крепление внутреннего кольца 68 виброизолирующей системы 60 к корпусу 86 блока 62 инерциальных датчиков. Корпус 86 образован базовым элементом 88 и закрывающим элементом 90, которые герметично прикреплены друг к другу с помощью уплотнительного кольца 92 известным в данной области способом. Корпус 86 содержит и защищает инерциальные датчики 93 из блока 62 инерциальных датчиков. В одном предпочтительном варианте осуществления инерциальные датчики 93 образованы тремя акселерометрами и тремя кольцевыми лазерными гироскопами и соответствующими им электронными схемами и аппаратными средствами, как в целом известно в данной области. Электрический разъем 94, смонтированный в закрывающем элементе 90, обеспечивает возможность передачи данных об инерциальных характеристиках между инерциальными датчиками 93 и навигационным компьютером (непоказанным) на борту воздушного судна.
Как лучше всего видно из фиг.5, соединительное устройство 84 включает в себя регулирующий механизм, образованный резьбовым участком 96 на внутренней боковой стенке 98 внутреннего элемента 68. Резьбовой участок 96 сопрягается с взаимодействующим с ним резьбовым участком 100 на наружной боковой стенке 101 базового элемента 88 корпуса 86. Резьбовое соединение резьбового участка 96 с резьбовым участком 100 обеспечивает крепление блока 62 инерциальных датчиков к виброизолирующей системе 60 и допускает ограниченное линейное перемещение корпуса 86 блока 62 инерциальных датчиков вдоль продольной оси 102 блока 62 инерциальных датчиков, которая перпендикулярна плоскости, образованной эластомерным элементом 64. Ограниченное линейное перемещение, возможность которого обеспечивается наличием упомянутого выше резьбового соединения, позволяет точно совместить поперечный центр 104 тяжести блока 62 инерциальных датчиков (то есть корпуса 86) с центром 106 упругости эластомерного элемента 64 виброизолирующей системы 60. Как лучше всего видно из фиг. 5, поперечный центр 104 тяжести расположен вдоль поперечной оси 108 блока 62 инерциальных датчиков, которая перпендикулярна продольной оси 102.
Как видно из фиг.3 и 5, соединительное устройство 84 дополнительно включает в себя стопорный механизм, образованный упругим элементом 110, который действует между выступающей частью 112 на наружной боковой стенке 101 базового элемента 88 корпуса 86 и выступающей зоной 114 на внутренней боковой стенке 98 внутреннего элемента 68. Упругий элемент 110 удерживается внутри паза 116 на наружной боковой стенке 101 базового элемента 88. Упругий элемент 110 создает упругое (возвращающее) усилие, которое действует между корпусом 86 и внутренним элементом 68 при сжатии упругого элемента между выступающей частью 112 и выступающей зоной 114 в процессе ввинчивания блока 62 инерциальных датчиков в виброизолирующую систему 60. Упругое усилие позволяет поддерживать положение блока 62 инерциальных датчиков относительно виброизолирующей системы 60 и, тем самым, сохранить положение, при котором поперечный центр 104 тяжести блока 62 инерциальных датчиков точно совмещен с центром 106 упругости виброизолирующей системы 60. В одном предпочтительном варианте осуществления упругий элемент 110 представляет собой кольцевое уплотнение, выполненное на материала типа 8GE409A19B37EA14G11E016E036F19, как определено в документе Американского общества по испытанию материалов ASTM-D2000. Материалы данного типа изготавливаются многочисленными производителями для различных соответствующих случаев применения.
Виброизолирующая система 60 изолирует блок 62 инерциальных датчиков от удара и вибрации, которые в противном случае могли бы передаваться от опоры 76 блоку 62 инерциальных датчиков. Виброизолирующая система 60 устраняет необходимость согласования естественных частот многочисленных изолирующих опор, поскольку используется только один эластомерный элемент 64. Кроме того, поскольку имеется только один эластомерный элемент 64, сравнительно легко совместить центр 106 упругости эластомерного элемента 64 с центром 104 тяжести блока 62 инерциальных датчиков. Виброизолирующая система 60 обеспечивает приемлемую изоляцию от удара и виброизоляцию блока 62 инерциальных датчиков и сравнительно проста и недорога в изготовлении.
Несмотря на то, что настоящее изобретение было описано со ссылкой на предпочтительные варианты осуществления, для специалистов в данной области очевидно, что могут быть выполнены изменения по форме и в деталях, не отходя от идеи и объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2008 |
|
RU2430674C1 |
| ВИБРОИЗОЛИРУЮЩАЯ МУФТА И СПОСОБ СНИЖЕНИЯ ВЫСОКОЧАСТОТНЫХ КРУТИЛЬНЫХ КОЛЕБАНИЙ В БУРИЛЬНОЙ КОЛОННЕ | 2020 |
|
RU2792052C1 |
| ПРОСТОЕ СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2345254C2 |
| АМОРТИЗАТОР СИСТЕМЫ ВИБРОЗАЩИТЫ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2021 |
|
RU2774216C1 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ДЛЯ МОРСКОГО СУДНА, СОДЕРЖАЩАЯ ДВИЖИТЕЛЬНЫЙ БЛОК, ПОДШИПНИК РУЛЯ И СОЕДИНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ | 2017 |
|
RU2754469C2 |
| ТРЕНАЖЕР С "БЕГУЩЕЙ" ДОРОЖКОЙ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2524912C1 |
| РУЧНАЯ ШЛИФОВАЛЬНАЯ МАШИНА | 2007 |
|
RU2458774C2 |
| ИНЕРЦИАЛЬНЫЙ БЛОК С ПОДВЕСНЫМ ИНЕРЦИАЛЬНЫМ УСТРОЙСТВОМ | 2018 |
|
RU2747441C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И/ИЛИ ХРАНЕНИЯ, СОДЕРЖАЩЕЕ ИЗОЛИРУЮЩИЙ БАЛЛОН С ДВОЙНОЙ СТЕНКОЙ | 2008 |
|
RU2454617C2 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
Изобретение относится к виброизолирующим системам, предназначенным для ограничения передачи выделяемой извне энергии колебаний и ударов механически чувствительным элементам. Сущность изобретения заключается в том, что виброизолирующая система включает в себя кольцеобразный эластомерный элемент и кольцеобразные наружный и внутренний элементы. Как наружный, так и внутренний элементы зафиксированы относительно эластомерного элемента. Кроме того, наружный элемент прикреплен к опоре, а внутренний элемент прикреплен к блоку инерциальных датчиков. Техническим результатом является обеспечение изоляции блока инерциальных датчиков от удара и вибрации, которые в противном случае могли бы передаваться от опоры к блоку инерциальных датчиков. 7 з.п. ф-лы, 5 ил.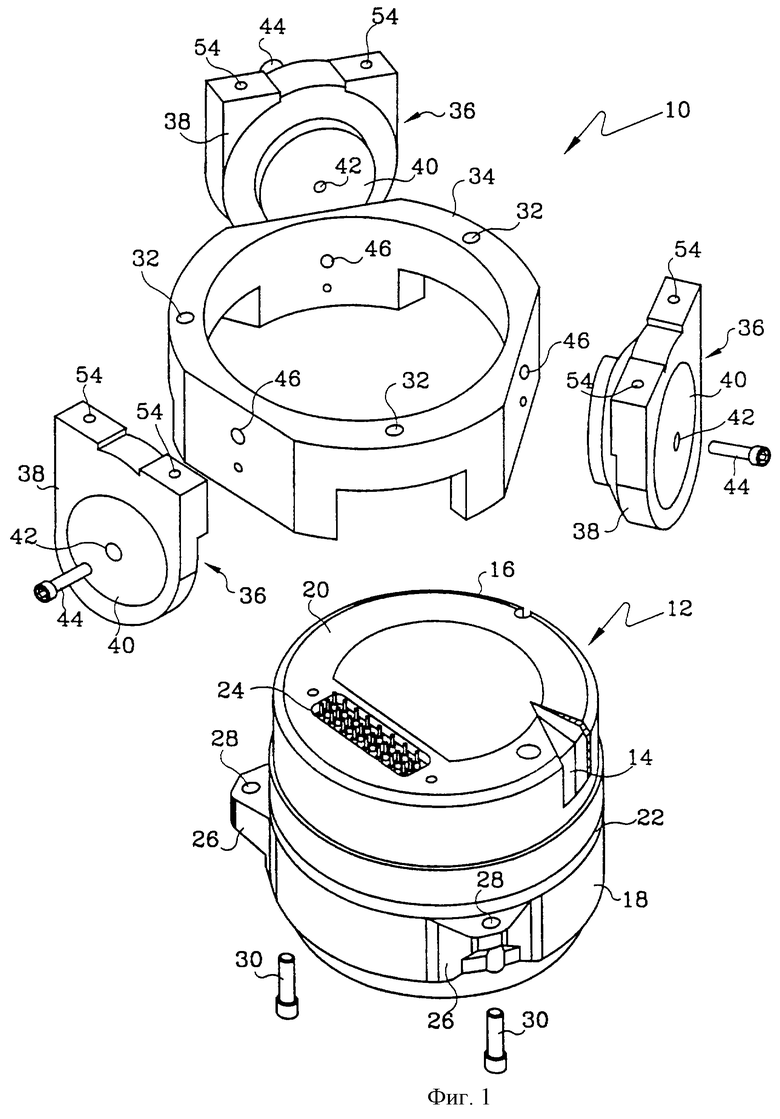
| СИСТЕМА ГАШЕНИЯ КОЛЕБАНИЙ КРЫШИ ВИСЯЧИХ КОНСТРУКЦИЙ | 2003 |
|
RU2271422C2 |
| Яворский Ю | |||
| Резина в автомобилях | |||
| - Л.: Машиностроение, 1980, с.204-213 | |||
| УСТРОЙСТВО для АМОРТИЗАЦИИ РАБОЧИХ ОРГАНОВ ВИБРАЦИОННЫХ МАШИН | 0 |
|
SU190249A1 |
| US 3584858 А, 15.06.1971. | |||

