Текст описания в факсимильном виде (см. графическую часть) То
Изобретение относится к радиотехнике и может быть использовано при кодировании цифрового широкополосного сигнала. Технический результат заключается в повышении качества восстановленного сигнала. Устройство перцептивного взвешивания для получения перцептивно взвешенного сигнала при реагировании на широкополосный сигнал содержит фильтр введения предыскажения сигнала, калькулятор фильтра синтеза и фильтр перцептивного взвешивания. Фильтр введения предыскажения имеет передаточную функцию P(z) = 1-μz-1, где μ - множитель введения предыскажения со значением между 0 и 1. Фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:

значения управления взвешиванием, в результате чего взвешивание широкополосного сигнала в формантной области по существу отделено от изменения относительного уровня спектральных составляющих этого широкополосного сигнала. 7 с. и 42 з.п. ф-лы, 4 ил.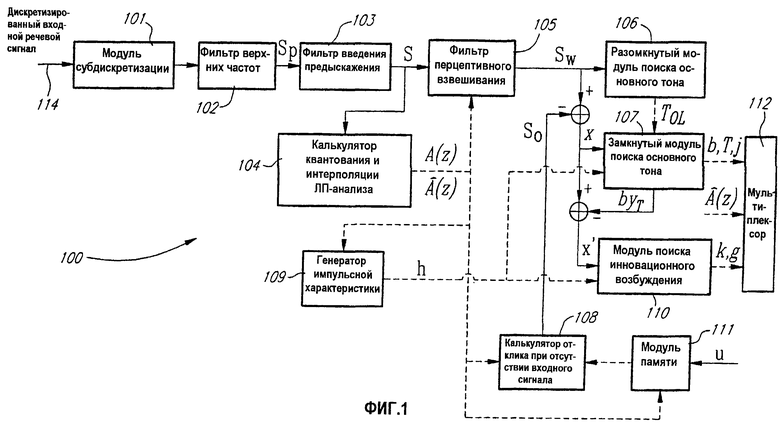
1. Устройство перцептивного взвешивания для получения перцептивно взвешенного сигнала при реагировании на широкополосный сигнал для уменьшения разности между взвешенным широкополосным сигналом и впоследствии синтезированным взвешенным широкополосным сигналом, содержащее а) фильтр введения предыскажения сигнала, реагирующий на широкополосный сигнал, для увеличения высокочастотного содержания широкополосного сигнала, чтобы тем самым получить сигнал с введенным предыскажением, б) калькулятор фильтра синтеза, реагирующий на сигнал с введенным предыскажением для получения коэффициентов фильтра синтеза и в) фильтр перцептивного взвешивания, реагирующий на сигнал с введенным предыскажением и коэффициенты фильтра синтеза для фильтрации сигнала с введенным предыскажением относительно коэффициентов фильтра синтеза, чтобы тем самым получить указанный перцептивно взвешенный сигнал, при этом фильтр перцептивного взвешивания имеет передаточную функцию с фиксированным знаменателем, в результате чего взвешивание широкополосного сигнала в формантной области по существу отделено от изменения относительного уровня спектральных составляющих широкополосного сигнала.2. Устройство перцептивного взвешивания по п.1, отличающееся тем, что фильтр введения предыскажения сигнала имеет передаточную функцию следующего вида:
P(z)=1-μz-1,
где μ - множитель введения предыскажения, имеющий значение между 0 и 1.
3. Устройство перцептивного взвешивания по п.2, отличающееся тем, что множитель введения предыскажения μ составляет 0,7.4. Устройство перцептивного взвешивания по п.2, отличающееся тем, что фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=А(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γl≤1, а γ2 и γ1 являются значениями управления взвешиванием.
5. Устройство перцептивного взвешивания по п.4, отличающееся тем, что γ2 установлено равным μ.6. Устройство перцептивного взвешивания по п.1, отличающееся тем, что фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=А(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, а γ2 и γ1 являются значениями управления взвешиванием.
7. Устройство перцептивного взвешивания по п.6, отличающееся тем, что γ2 установлено равным μ.8. Способ получения перцептивно взвешенного сигнала при реагировании на широкополосный сигнал для уменьшения разности между взвешенным широкополосным сигналом и впоследствии синтезированным взвешенным широкополосным сигналом, заключающийся в том, что а) фильтруют широкополосный сигнал для получения сигнала с введенным предыскажением с увеличенным высокочастотным содержанием, б) вычисляют коэффициенты фильтра синтеза из сигнала с введенным предыскажением и в) фильтруют сигнал с введенным предыскажением относительно коэффициентов фильтра синтеза, чтобы тем самым получить перцептивно взвешенный речевой сигнал, причем при фильтрации обрабатывают сигнал с введенным предыскажением с помощью фильтра перцептивного взвешивания, имеющего передаточную функцию с фиксированным знаменателем, в результате чего взвешивание широкополосного сигнала в формантной области по существу отделяют от изменения относительного уровня спектральных составляющих широкополосного сигнала.9. Способ получения перцептивно взвешенного сигнала по п.8, отличающийся тем, что при фильтрации широкополосного сигнала осуществляют фильтрацию с помощью передаточной функции следующего вида:Р(z)=1-μz-1,
где μ - множитель введения предыскажения, имеющий значение между 0 и 1.
10. Способ получения перцептивно взвешенного сигнала по п.9, отличающийся тем, что множитель μ введения предыскажения составляет 0,7.11. Способ получения перцептивно взвешенного сигнала по п.9, отличающийся тем, что фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=А(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
12. Способ получения перцептивно взвешенного сигнала по п.11, отличающийся тем, что γ2 устанавливают равным μ.13. Способ получения перцептивно взвешенного сигнала по п.8, отличающийся тем, что фильтр перцептивного взвешивания имеет некоторую передаточную функцию следующего вида:W(z)=A(z/γ1)/(1-γ2Z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
14. Способ получения перцептивно взвешенного сигнала по п.13, отличающийся тем, что γ2 устанавливают равным μ.15. Кодер для кодирования широкополосного сигнала, содержащий а) устройство перцептивного взвешивания по п.1, б) устройство поиска в кодовом словаре основного тона, реагирующее на перцептивно взвешенный сигнал, для получения параметров кодового словаря основного тона и получения целевого вектора инновационного поиска, в) устройство поиска в инновационном кодовом словаре, реагирующее на коэффициенты фильтра синтеза и на целевой вектор инновационного поиска, для получения параметров инновационного кодового словаря и г) устройство формирования сигнала для получения кодированного широкополосного сигнала, содержащего параметры кодового словаря основного тона, параметры инновационного кодового словаря и коэффициенты фильтра синтеза.16. Кодер по п.15, отличающийся тем, что указанный фильтр введения предыскажения сигнала имеет передаточную функцию следующего вида:P(z)=1-μz-1,
где μ - множитель введения предыскажения, имеющий значение между 0 и 1.
17. Кодер по п.16, отличающийся тем, что множитель μ введения предыскажения равен 0,7.18. Кодер по п.16, отличающийся тем, что фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=А(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, а γ2 и γ1 являются значениями управления взвешиванием.
19. Кодер по п.18, отличающийся тем, что γ2 установлено равным μ.20. Кодер по п.15, отличающийся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=A(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, а γ2 и γ1 являются значениями управления взвешиванием.
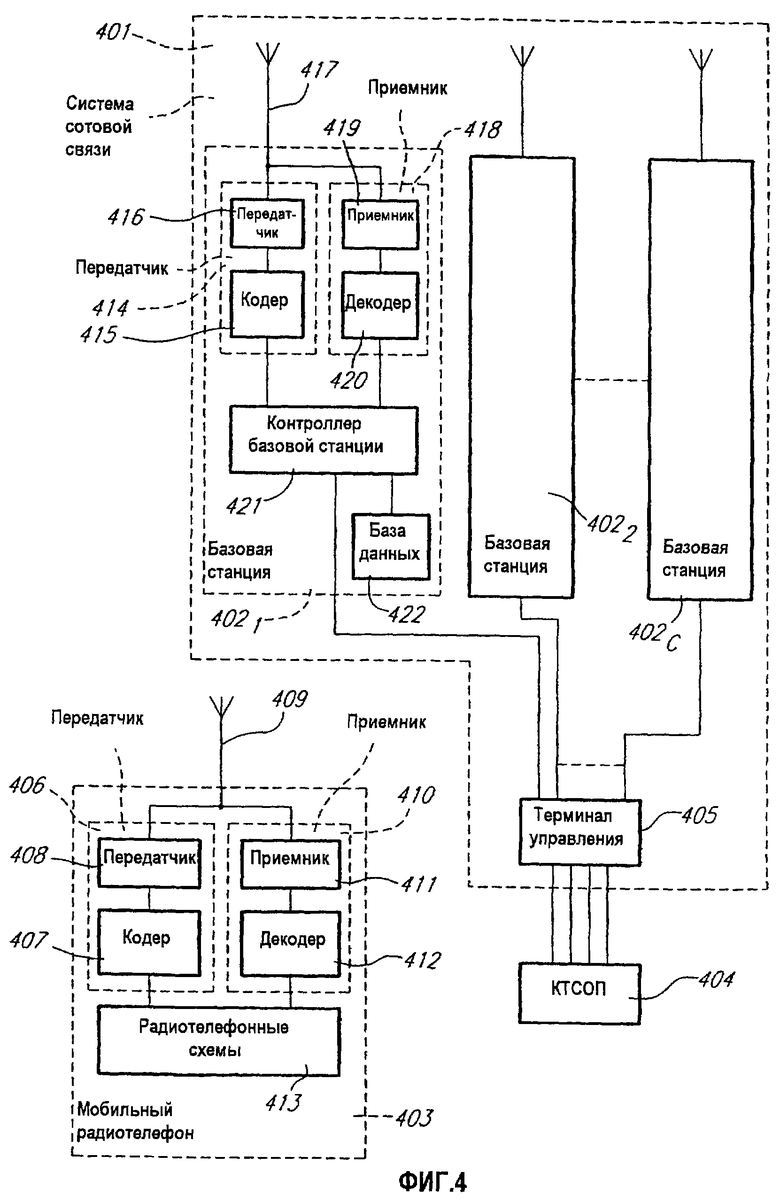
21. Кодер по п.20, отличающийся тем, что μ установлен равным γ2.22. Система сотовой связи для обслуживания крупного географического района, разделенного на совокупность сотовых ячеек, содержащая а) подвижные приемопередающие устройства, б) сотовые базовые станции, соответственно расположенные в сотовых ячейках, в) терминал управления для управления связью между сотовыми базовыми станциями, г) подсистему двухсторонней радиосвязи между каждым подвижным приемопередающим устройством, находящимся в одной сотовой ячейке, и сотовой базовой станцией указанной одной сотовой ячейки, причем подсистема двухсторонней радиосвязи содержит и в подвижном приемопередающем устройстве, и в сотовой базовой станции (i) передатчик, содержащий кодер для кодирования широкополосного сигнала по п.15 и передающую схему для передачи кодированного широкополосного сигнала, и (ii) приемник, содержащий приемную схему для приема передаваемого кодированного широкополосного сигнала и декодер для декодирования принимаемого кодированного широкополосного сигнала.23. Система сотовой связи по п.22, отличающаяся тем, что указанный фильтр введения предыскажения имеет передаточную функцию следующего вида:P(z)=1-μz-1,
где μ является множителем введения предыскажения, имеющим значение между 0 и 1.
24. Система сотовой связи по п.23, отличающаяся тем, что множитель введения предыскажения μ равен 0,7.25. Система сотовой связи по п.23, отличающаяся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=A(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
26. Система сотовой связи по п.25, отличающаяся тем, что μ установлен равным γ2.27. Система сотовой связи по п.22, отличающаяся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=A(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
28. Система сотовой связи по п.27, отличающаяся тем, что γ2 установлено равным μ.29. Подвижное приемопередающее устройство сотовой связи, содержащее а) передатчик, содержащий кодер для кодирования широкополосного сигнала по п.15 и передающую схему для передачи кодированного широкополосного сигнала, и б) приемник, содержащий приемную схему для приема передаваемого кодированного широкополосного сигнала и декодер для декодирования принимаемого кодированного широкополосного сигнала.30. Подвижное приемопередающее устройство сотовой связи по п.29, отличающееся тем, что указанный фильтр введения предыскажения сигнала имеет передаточную функцию следующего вида:P(z)=1-μz-1,
где μ является множителем введения предыскажения, имеющим значение между 0 и 1.
31. Подвижное приемопередающее устройство сотовой связи по п.30, отличающееся тем, что множитель введения предыскажения μ равен 0,7.32. Подвижное приемопередающее устройство сотовой связи по п.30, отличающееся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=A(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
33. Подвижное приемопередающее устройство сотовой связи по п.32, отличающееся тем, что γ2 установлено равным μ.34. Подвижное приемопередающее устройство сотовой связи по п.29, отличающееся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:N(z)=А(z/γ1)/(1-γ2z-1),
гдe A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
35. Подвижное приемопередающее устройство сотовой связи по п.34, отличающееся тем, что γ2 установлено равным μ.36. Сотовая базовая станция, содержащая а) передатчик, содержащий кодер для кодирования широкополосного сигнала по п.15 и передающую схему для передачи кодированного широкополосного сигнала, и б) приемник, содержащий приемную схему для приема передаваемого кодированного широкополосного сигнала и декодер для декодирования принимаемого кодированного широкополосного сигнала.37. Элемент сети сотовой связи по п.36, отличающийся тем, что указанный фильтр введения предыскажения сигнала имеет передаточную функцию следующего вида:P(z)=1-μz-1,
где μ является множителем введения предыскажения, имеющим значение между 0 и 1.
38. Элемент сети сотовой связи по п.37, отличающийся тем, что множитель введения предыскажения μ равен 0,7.39. Сотовая базовая станция по п.37, отличающаяся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=А(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
40. Сотовая базовая станция по п.39, отличающаяся тем, что γ2 установлено равным μ.41. Сотовая базовая станция по п.36, отличающаяся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=А(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
42. Сотовая базовая станция по п.41, отличающаяся тем, что μ установлен равным γ2.43. Подсистема двухсторонней радиосвязи между каждым подвижным приемопередающим устройством, находящимся в одной сотовой ячейке, и сотовой базовой станцией указанной одной сотовой ячейки в системе сотовой связи для обслуживания крупного географического района, разделенного на некоторую совокупность сотовых ячеек, содержащей подвижные приемопередающие устройства, сотовые базовые станции, соответственно находящиеся в сотовых ячейках, и терминал управления для управления связью между сотовыми базовыми станциями, содержащая и в подвижном приемопередающем устройстве, и в сотовой базовой станции а) передатчик, содержащий кодер для кодирования широкополосного сигнала по п.15 и передающую схему для передачи кодированного широкополосного сигнала, и б) приемник, содержащий приемную схему для приема передаваемого кодированного широкополосного сигнала и декодер для декодирования принимаемого кодированного широкополосного сигнала.44. Подсистема двухсторонней радиосвязи по п.43, отличающаяся тем, что указанный фильтр введения предыскажения сигнала имеет передаточную функцию следующего вида:Р(z)=1-μz-1,
где μ является множителем введения предыскажения, имеющим значение между 0 и 1.
45. Подсистема двухсторонней радиосвязи по п.44, отличающаяся тем, что множитель введения предыскажения μ равен 0,7.46. Подсистема двухсторонней радиосвязи по п.44, отличающаяся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=A(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
47. Подсистема двухсторонней радиосвязи по п.46, отличающаяся тем, что μ установлен равным γ2.48. Подсистема двухсторонней радиосвязи по п.43, отличающаяся тем, что указанный фильтр перцептивного взвешивания имеет передаточную функцию следующего вида:W(z)=A(z/γ1)/(1-γ2z-1),
где A(z) является передаточной функцией фильтра линейного предсказания и 0<γ2<γ1≤1, a γ2 и γ1 являются значениями управления взвешиванием.
49. Подсистема двухсторонней радиосвязи по п.48, отличающаяся тем, что γ2 установлено равным μ.