Предлагаемое изобретение относится к автоматике и технической кибернетике и может быть использовано при разработке систем автоматического анализа и классификации изображений.
Существует метод обнаружения цели, основанный на методе предварительной компенсации фона и заключающийся в формировании гистограммы яркостей, обработке одномерного сигнала узкополосным фильтром низких частот, последующем вычитании его из исходного видеосигнала, усреднении результата, однопороговой сегментации, причем для выбора порога использованы гистограммы яркостей /1/.
Данный метод обладает невысокой вероятностью обнаружения на пестрой разнохарактерной поверхности, окружающей вероятные цели и наиболее часто встречающейся в естественных структурах.
Наиболее близким к предлагаемому по технической сущности является способ обнаружения цели, применяемый в способе наведения ракет /2/, в котором создаются кадры изображения в ИК-диапазоне, изображение преобразуется в совокупность сигналов, представляющую собой прямоугольную матрицу сигналов, при этом цель принимается за протяженную площадку, тепловая сигнатура которой определяется распределением точечных источников ИК энергии, которое существенно отличается от распределения энергии на площади, образующей фон для цели.
Недостатком данного способа является высокая вероятность ложной тревоги из-за неопределенности критерия обнаружения при выборе объекта в качестве цели.
Данный способ может быть реализован, например, устройством для выделения признаков для распознавания объектов, содержащим фотоэлектрический преобразователь, первый и второй формирователи позиционных сигналов, первый, второй и третий коммутаторы, схему дискретизации видеосигналов, временное устройство, память, логическую схему "И", счетчик, причем выход второго формирователя позиционных сигналов соединен со вторым входом второго коммутатора, первый вход которого соединен с выходом первого формирователя позиционных сигналов, третий вход - с первым выходом временного устройства и входом первого коммутатора, а выход соединен со вторым входом третьего коммутатора, первый вход которого соединен с выходом фотоэлектрического преобразователя матричного типа, выход третьего коммутатора соединен со входом схемы дискретизации видеосигналов, первый вход памяти соединен с выходом первого коммутатора, второй вход - с выходом схемы дискретизации видеосигналов, третий вход - со вторым выходом временного устройства, четвертый вход - с третьим выходом временного устройства и первым входом счетчика, а выход памяти соединен с первым входом логической схемы "И", выход которой соединен со вторым входом счетчика, четвертый выход временного устройства соединен со вторым входом логической схемы "И", выход счетчика является выходом устройства /3/.
Недостатком такого устройства является ограниченность реализуемых функций для принятия с высокой вероятностью решения об обнаружении цели.
Задачей предлагаемого изобретения является повышение вероятности правильного обнаружения цели за счет принятия в качестве цели объекта с наибольшей тепловой неоднородностью поверхности, характерной, в частности, для объектов транспортной техники в состоянии движения и вскоре после его прекращения в отличие от более равномерных тепловых полей, встречающихся в естественных структурах фоновых объектов, имеющих размеры цели.
Поставленная задача достигается тем, что в предлагаемом изобретении в способе обнаружения цели, включающем операции создания кадра изображения в ИК-диапазоне, преобразования изображения в совокупность сигналов, представляющую собой прямоугольную матрицу сигналов, дискретизации сигналов, выделения изображения цели как изображения протяженной площадки, тепловая сигнатура которой определяется распределением точечных источников ИК-энергии, которое существенно отличается от распределения энергии на площади, образующей фон для цели, в нем при выделении изображения цели производят сканирование изображения поля зрения окном сканирования с размерами, согласованными с размерами изображения цели, для каждого выделенного объекта по дискретным элементам матрицы сигналов, принадлежащим изображению объекта, определяют количество N сигналов с разными амплитудами, в качестве цели принимают объект с максимальной величиной N;
в устройство для выделения признаков при распознавании объектов, содержащее фотоэлектрический преобразователь матричного типа, первый и второй формирователи позиционных сигналов, первый, второй и третий коммутаторы, схему дискретизации видеосигналов, временное устройство, память, логическую схему "И", счетчик, причем выход второго формирователя позиционных сигналов соединен со вторым входом второго коммутатора, первый вход которого соединен с выходом первого формирователя позиционных сигналов, третий вход - с первым выходом временного устройства и входом первого коммутатора, переключаемого на выходе в состояния "1" и "0", а выход второго коммутатора соединен со вторым входом третьего коммутатора, первый вход которого соединен с выходом фотоэлектрического преобразователя матричного типа, выход третьего коммутатора соединен со входом схемы дискретизации видеосигналов, первый вход памяти соединен с выходом первого коммутатора, третий вход - со вторым выходом временного устройства, а выход памяти соединен с первым входом логической схемы "И", выход которой соединен со вторым входом счетчика, первый вход которого соединен с третьим выходом временного устройства, четвертый выход временного устройства соединен со вторым входом логической схемы "И", дополнительно введены третий формирователь позиционных сигналов, четвертый коммутатор, сканер, первое и второе устройства хранения, устройство сравнения, причем выход третьего формирователя позиционных сигналов соединен со вторым входом четвертого коммутатора, первый вход которого соединен с выходом схемы дискретизации видеосигналов, третий вход - с четвертым выходом временного устройства и вторым входом логической схемы "И", а выход - со вторым входом памяти, выход сканера подключен ко входу фотоэлектрического преобразователя матричного типа и второму входу второго устройства хранения, третий вход первого устройства хранения и второй вход устройства сравнения соединены с выходом счетчика, а второй вход первого устройства хранения - с выходом устройства сравнения и первым входом второго устройства хранения, выход первого устройства хранения соединен с первым входом устройства сравнения, выходом устройства является выход второго устройства хранения.
Положительный эффект обеспечивается за счет сканирования изображения поля зрения при выделении изображения цели окном сканирования с размерами, согласованными с размерами изображения цели, подсчета количества сигналов ИК-диапазона с разными амплитудами с поверхности каждого выделенного объекта по дискретным элементам матрицы сигналов, принадлежащим изображению объекта, и принятия за цель объекта с максимальной для данного кадра величиной N. Тем самым целью считается объект с соответствующими заданными габаритами, обладающий наибольшей неоднородностью тепловой поверхности, значительным локальным контрастом.
Предлагаемый способ заключается в следующем.
ИК-приемник (фотоэлектрический преобразователь) матричного типа принимает сигналы теплового излучения с поля зрения, содержащего цель, осуществляет преобразование тепловых сигналов в электрические, пропорциональные температуре с излучающей поверхности, разбиение изображения сюжета на дискретные элементы, тем самым формирует кадр изображения. Производят дискретизацию полученных сигналов по амплитуде в диапазоне 1...К и сканирование изображения кадра окном сканирования, размеры которого согласованы с размерами искомого объекта. В процессе сканирования выделяют изображения объектов, тепловая сигнатура которых отличается от распределения сигналов на площади, образующий фон для объекта, а размеры соответствуют габаритным размерам искомой цели.
Среди выделенных изображений находят цель как объект с наибольшей неоднородностью тепловой поверхности и, соответственно, неоднородностью электрических сигналов, разнообразием их амплитуд по дискретным элементам изображения объекта.
Для этого по дискретным элементам матрицы сигналов, принадлежащим изображению выделенного объекта, определяют количество сигналов N с разными амплитудами
К - диапазон дискретизации;
Аi - признак наличия или отсутствия сигнала с амплитудой величиной i на дискретных элементах матрицы, принадлежащих изображению объекта;
Аi= 0 при отсутствии амплитуды величиной i, Ai=1 при наличии амплитуды величиной i.
В качестве цели принимают объект с максимальной величиной N.
Данное техническое решение поясняется графическими материалами. На фиг.1 изображена блок-схема устройства, с помощью которого можно реализовать предлагаемый способ; на фиг.2 - циклограмма работы временного устройства.
Предлагаемое устройство работает следующим образом. При подаче питания происходит автоматическое обнуление данных в устройстве хранения 1 (15). На каждом шаге сканирования реализуются 4 такта (Т1-Т4) в соответствии с циклограммой работы временного устройства (11).
Первый такт работы устройства Т1 - сброс счетчика (14) и обнуление ячеек памяти (12).
Для этого сигнал низкого уровня (в дальнейшем - сигнал "0") с первого выхода временного устройства поступает на вход коммутатора 1 (3) и устанавливает его в состояние "0", при котором с его выхода на первый вход памяти (вход записи данных) поступает сигнал "0". На втором выходе временного устройства сформирован сигнал "0", поступающий на 3-й вход памяти (вход разрешения/запрета записи в выбранную ячейку, активный уровень - низкий), разрешающий запись информации. На третьем выходе временного устройства формируется сигнал высокого уровня (в дальнейшем сигнал "1") и поступает на первый вход счетчика (вход сброса) и обнуляет счетчик. Сигнал "1" с четвертого выхода временного устройства поступает на второй вход логической схемы (13), являющейся схемой "И", и на третий вход коммутатора 4 (10), при этом устанавливает его в состояние, при котором на второй вход памяти (вход адресов ) поступают сигналы с выхода третьего формирователя позиционных сигналов (5). При этом на второй вход памяти последовательно поступают адреса, соответствующие амплитудам сигналов в диапазоне разрядности схемы дискретизации видеосигналов, и во все адреса записывается сигнал "0", действующий на первом входе памяти.
Второй такт работы устройства Т2 - обработка сигналов с элементов фотоэлектрического преобразователя матричного типа (7), принадлежащих ОИО.
На первом, третьем и четвертом выходах временного устройства уровни сигналов меняются на противоположные. На первом выходе временного устройства появляется сигнал "1", на остальных - сигнал "0". Сигнал "1" с первого выхода временного устройства поступает на вход коммутатора 1, на выходе которого устанавливается состояние "1", при котором с его выхода на первый вход памяти поступает сигнал "1". Сигнал "1" с первого выхода временного устройства поступает на вход 3 коммутатора 2 (4) и устанавливает его в положение, когда на второй вход коммутатора 3 (8) через второй вход и выход коммутатора 2 поступают адреса ОИО, определенные во втором формирователе позиционных сигналов ОИО (2) в соответствии с законом сканирования. Сигнал "0" с третьего выхода временного устройства снимает с первого входа счетчика сигнал сброса. Сигнал "0" с четвертого выхода временного устройства поступает на третий вход коммутатора 4 и устанавливает его в состояние, при котором с его выхода на второй вход памяти поступают сигналы с выхода схемы дискретизации видеосигналов (9). Также сигнал "0" с четвертого выхода временного устройства поступает на второй вход схемы "И" (13) и с ее выхода на второй вход счетчика, блокируя прохождение сигналов с выхода памяти на второй вход счетчика. На матрицу фотоэлектрического преобразователя проецируется анализируемое изображение. По адресам, поступающим из второго формирователя позиционных сигналов через коммутатор 2 на второй вход коммутатора 3, последний подключает элементы матрицы фотоэлектрического преобразователя, принадлежащие ОИО, к схеме дискретизации видеосигналов, в которой осуществляется преобразование аналогового сигнала с фотоэлектрического преобразователя матричного типа в цифровой код. В памяти происходит запись сигнала "1", действующего на входе 1 с выхода коммутатора 1, по адресам, поступающим в память с выхода схемы дискретизации видеосигналов через коммутатор 4. В результате опроса элементов ОИО в памяти по адресам, равным амплитудам сигналов с элементов матрицы фотоэлектрического преобразователя, соответствующих ОИО, записаны "1", т.е. через значения адресов памяти определены значения амплитуд сигналов ОИО.
Третий такт Т3 - обработка сигналов с элементов фотоэлектрического преобразователя матричного типа, принадлежащих рамке фона, и выделение сигналов с изображения объекта, имеющего локальный контраст относительно окружающего фона и размеры, соответствующие размерам искомого объекта. Из амплитуд сигналов с дискретных элементов ОИО исключают амплитуды сигналов с дискретных элементов рамки фона.
На первом выходе временного устройства уровень сигнала изменяется на противоположный, появляется сигнал "0". Сигнал "0" с первого выхода временного устройства поступает на вход коммутатора 1, который устанавливается в состояние "0", при этом с его выхода на первый вход памяти поступает сигнал "0". Сигнал "0" с первого выхода временного устройства поступает на вход 3 коммутатора 2 и устанавливает его в положение, когда на второй вход коммутатора 3 через второй вход и выход коммутатора 2 поступают адреса элементов рамки фона, определенные в первом формирователе позиционных сигналов рамки фона (1) в соответствии с законом сканирования. Коммутатор 3 подключает к схеме дискретизации видеосигналов элементы матрицы фотоэлектрического преобразователя, принадлежащие рамке фона. С выхода схемы дискретизации видеосигналов через коммутатор 4 на второй вход памяти поступают значения амплитуд сигналов с элементов рамки фона. По адресам, равным данным амплитудам, в память записывается сигнал "0", действующий на первом входе памяти. При этом меняется состояние только тех ячеек памяти, в которых на предыдущем такте (опросе элементов ОИО) была записана "1", т.е. из памяти стирается информация по адресам, выраженным амплитудами сигналов, одинаковыми для ОИО и рамки фона. По окончании опроса элементов рамки фона в память записана "1" только по тем адресам, значения которых равны значению амплитуд сигналов с элементов ОИО и отсутствуют среди амплитуд с элементов рамки фона.
Четвертый такт Т4 - определение величины признака, степени неоднородности яркости поверхности объекта с локальным контрастом, и координат цели.
На втором и четвертом выходах временного устройства уровни сигналов меняются на противоположные, появляются сигналы "1". Со второго выхода временного устройства на третий вход памяти поступает сигнал "1", запрещающий запись данных в память и разрешающий чтение данных из памяти. С четвертого выхода временного устройства сигнал "1" поступает на второй вход логической схемы "И" и разрешает прохождение сигнала с выхода памяти на второй вход счетчика и счет единичных импульсов, действующих на его втором входе. Также сигнал " 1" с четвертого выхода временного устройства поступает на третий вход коммутатора 4, который соединяет выход третьего формирователя позиционных сигналов со вторым входом памяти. На второй вход памяти последовательно поступают адреса, соответствующие амплитудам сигналов в диапазоне разрядности схемы дискретизации видеосигналов. Если на втором входе памяти возникает импульс с амплитудой, равной адресу ячейки памяти, в которой хранится "1", с выхода памяти положительный импульс поступает на первый вход логической схемы "И", и с ее выхода на второй вход счетчика, где производится подсчет единичных импульсов. Подсчитанное в счетчике значение искомого признака объекта в текущем положении окна сканирования в устройстве сравнения (16) сопоставляется со значением, хранящимся устройстве хранения 1, и, если оно превышает значение последнего, устройство сравнения выдает сигнал разрешения записи на второй вход устройства хранения 1 нового значения выделенного признака, а в устройство хранения 2 (17) - соответствующего ему значения координат окна сканирования, поступающего со сканера (6). Для этого с выхода счетчика значение искомого признака объекта поступает на третий вход (вход данных) устройства хранения 1 (15). На его втором входе (входе разрешения загрузки), действует сигнал с выхода, отображающего неравенство входных данных, устройства сравнения (16). Если данные на втором входе устройства сравнения больше данных на его первом входе, на выходе устройства сравнения появляется сигнал "1", поступающий на второй вход устройства хранения 1. При этом данные с третьего входа устройства хранения 1 без изменения отображаются на его выходе. Сигнал "1" с выхода устройства сравнения также поступает на первый вход (вход разрешения загрузки), устройства хранения 2 (17), на втором входе (вход данных) которого сформированы координаты окна сканирования, соответствующие текущему значению признака. Данные с его второго входа без изменения отображаются на выходе.
В результате после завершения сканирования (просмотра) всего поля зрения в устройстве хранения 1 будет содержаться максимальное значение искомого признака объекта - степени неоднородности яркости поверхности объекта с локальным контрастом. Данный объект и является целью. В устройстве хранения 2, выходном блоке, содержится значение сигнала координат, определяющих соответствующее положение окна сканирования в поле зрения - координаты цели.
Логическая схема "И" может быть выполнена, например, на микросхеме - К155ЛИ1 /7/, счетчик - К155ИЕ2, коммутаторы - К176КТ1, память -К155РУ5, схема дискретизации - аналогово-цифровой преобразователь К1107 ПВ1 аналогично прототипу /3/, фотоэлектрический преобразователь матричного типа может быть выполнен, например, на ПЗС матрице /4/, формирователи позиционных сигналов - аналогично прототипу /3/. Сканер может быть выполнен в виде оптико-механического устройства на основе зеркала, приводимого в движение кулачками развертки, как это реализовано в тепловизоре фирмы "Баркс инжиниринг компани" (США) /6/. Устройство сравнения может быть выполнено на микросхеме 561ИП2 /7/, устройства хранения - на D-триггерах, например, 155ТМ8 /7/. Для обеспечения автоматического обнуления данных при подаче питания в устройстве хранения 1 входы синхронного сброса D-триггеров подключают к цепочке RC, как это показано на фиг.1, стр. 49-50, /8/ (элементы R4, С2). В момент включения питания эта цепочка в течение небольшого промежутка времени удерживает на входе синхронного сброса триггеров сигнал, имеющий значение логического "0", который и обеспечивает обнуление триггеров и устройства хранения. В устройстве хранения 2 нет необходимости обеспечения автоматического обнуления данных при подаче питания, поэтому на вход R триггера должен быть подан сигнал логической "1", для чего этот вход может быть подключен к выводу питания триггера.
Временное устройство может быть выполнено на микросхемах типа таймер серии 555 (российский аналог КР1006ВИ1). В /5/ на фиг.4.3 показано астабильное включение таймера 555 в качестве астабильного генератора импульсов. На фиг.4.4 /5/ приведена схема моностабильной конфигурации таймера, позволяющая при подаче на вход "Запуск" спадающего фронта сформировать на выходе одиночный импульс любой требуемой длительности.
Для формирования четырех временных интервалов на шаге сканирования во временном устройстве предлагаемого устройства соответственно используется четыре таких схемы. Схема астабильной конфигурации таймера (таймера 1), период выходного сигнала которой совпадает с периодом перехода на новый шаг сканирования блока 6, формирует сигнал, соответствующий третьему выходу временного устройства, и запускает два параллельно включенных таймера (таймеры 2 и 3), работающих в моностабильном режиме. Выход таймера 2 используется как первый выход временного устройства. Инвертированный сигнал (с помощью любого инвертора, например, микросхемы К155ЛН1 /7/) с выхода таймера 3 используется как сигнал четвертого выхода временного устройства. Сигнал, соответствующий второму выходу временного устройства, формируется схемой таймера 4 в моностабильной конфигурации, на вход запуска которой поступает неинвертированный сигнал с выхода таймера 3. Формулы, связывающие значения параметров времязадающих цепей с требуемыми временными параметрами сигналов, также приведены в /5/.
Временное устройство можно реализовать и на 4 ждущих мультивибраторах микросхем типа К564АГ1 /7/ с функциями, аналогичными таймеру 555, имеющих дополнительные инверсные выходы. На фиг.2.81, а /7/ показана схема построения автогенератора, выход которого (мультивибратора 1) можно использовать как третий выход временного устройства с периодом выходного сигнала, совпадающим с периодом перехода блока 6 на новый шаг сканирования. Также к выходу автогенератора параллельно подключают запускающие - TR входы двух мультивибраторов ( 2 и 3). Выход мультивибратора 2 используется как первый выход временного устройства, инверсный выход мультивибратора 3 - как четвертый выход временного устройства. Сигналы с прямого выхода мультивибратора 3 поступают на запускающий - TR вход мультивибратора 4, выход которого является вторым выходом временного устройства.
Таким образом, использование предлагаемых способа и устройства позволяет надежно обнаружить в поле зрения цель, обладающую такими отличительными признаками, как локальный контраст относительно близлежащего фона, высокая неоднородность тепловой поверхности, соответствие заданным габаритам.
Заявляемые способ обнаружения цели и устройство для его осуществления проверены с большой эффективностью в комплексе "Гермес", "Клевок-Д".
Источники информации
1. В.Л. Левшин. Биокибернетические оптико-электронные устройства автоматического распознавания изображений. М., "Машиностроение", 1987, стр.102.
2. США, патент 4898341, публикация 900206, кл. МКИ5 F 41 G 7/22, НКИ 244-3.14 - прототип.
3. Патент на изобретение РФ 2173880 от 20.09.2001 г., кл. G 06 К 9/46 - прототип.
4. Л.И. Хромов, Н.В. Лебедев, А.К. Цыцулин, А.Н. Куликов. Твердотельное телевидение. М., "Радио и связь", 1986.
5. М. Тули. Справочное пособие по цифровой электронике. М., "Энергоиздат", 1990, стр. 36-40.
6. М.М. Мирошников. Теоретические основы оптико-электронных приборов. Л. , "Машиностроение", 1983.
7. В. Л. Шило. Полупроводниковые цифровые микросхемы. М., "Радио и связь", 1987.
8. А. Медведев. Переключатель световых эффектов. М., "Радио", 3, 1986 г. , стр. 49-52.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ПРИ РАСПОЗНАВАНИИ ОБЪЕКТОВ | 2001 |
|
RU2209466C2 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2173880C2 |
| СПОСОБ ВЫДЕЛЕНИЯ ВЕКТОРА ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616575C2 |
| Способ обработки графической информации | 1987 |
|
SU1501111A1 |
| Способ считывания графической информации | 1982 |
|
SU1049935A1 |
| ЦИФРОВАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 1996 |
|
RU2128890C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006941C1 |
| Оптоэлектронный автосортировщик | 1983 |
|
SU1106554A1 |
| Способ считывания графической информации | 1983 |
|
SU1236520A1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2003 |
|
RU2246799C1 |

Изобретение относится к автоматике и технической кибернетике и может быть использовано при разработке систем автоматического анализа и классификации изображений. Достигаемым техническим результатом изобретения является повышение вероятности правильного обнаружения цели за счет принятия в качестве цели объекта с наибольшей тепловой неоднородностью поверхности, характерной, в частности, для объектов транспортной техники в состоянии движения и вскоре после его прекращения в отличие от более равномерных тепловых полей, встречающихся в естественных структурах фоновых объектов, имеющих размеры цели. Указанный технический результат обеспечивается за счет сканирования изображения поля зрения при выделении изображения цели окном сканирования с размерами, согласованными с размерами изображения цели, подсчета количества сигналов ИК-диапазона с разными амплитудами с поверхности каждого выделенного объекта по дискретным элементам матрицы сигналов, принадлежащим изображению объекта, и принятия за цель объекта с максимальной для данного кадра величиной N. Тем самым целью считается объект с соответствующими заданными габаритами, обладающий наибольшей неоднородностью тепловой поверхности, значительным локальным контрастом. 2 с.п. ф-лы, 1 ил.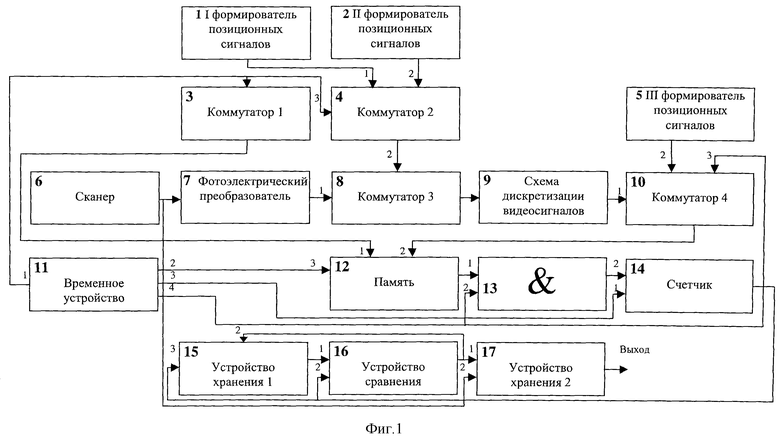
| US 4898341, 06.02.1990 | |||
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| US 5253823, 19.10.1993 | |||
| US 5132695, 21.07.1992. | |||
