Изобретение относится к вычислительной технике и может быть использовано в оптико-электронных системах автоматического сопровождения подвижных наземных и воздушных объектов для их селекции на фоне Земли.
К настоящему времени наибольшее распространение получили способы и реализующие их устройства, основанные на различных модификациях корреляционного метода определения координат местоположения летательного аппарата (ЛА) - объекта, на котором размещена измерительная аппаратура. Этот метод заключается в привязке двух изображений, одно из которых (эталонное) получено предварительно в виде электронной карты геофизического поля участков земной поверхности, а второе (текущее) получают от соответствующего датчика поля. Сравнивая изображения между собой, измеряют меру их сходства, в качестве которой используют коэффициент корреляции, экстремум корреляционной функции и др. При несовпадении изображений вычисляют ошибку в определении координат местоположения ЛА, которую используют для коррекции показаний навигационной системы и для внесения поправки в курс ЛА (см., например, Белоглазов И.Н. и др. Основы навигации по геофизическим полям - М.: Наука, 1985, с. 14-29).
С помощью корреляционного метода, используя вычисленные координаты местоположения ЛА, можно определить координаты наземных объектов, в том числе подвижных и малоразмерных, или низколетящих ЛА на фоне Земли. В случае селекции подвижных объектов изображения помимо самого объекта будут содержать участки местности (далее - фона), примыкающие к ней. Поэтому в области поиска при перемещении объекта по фону отличия эталонного и текущего изображений могут быть весьма существенны, что размывает экстремум корреляционной функции и снижает точность привязки. Кроме того, реализация корреляционно-экстремальных систем требует значительных затрат на создание эталонных карт, а также вычислительных ресурсов и затрат, которые растут пропорционально площади окна поиска объекта.
Наиболее близкой к заявленному изобретению является байесовская интеллектуальная система слежения по многим признакам MFBIT (Multifeature Bayesian Intellegent Tracker), разработанная Лабораторией передовой технологии штата Нью-Джерси, США.
В системе реализован способ селекции наземных объектов (целей), который заключается в следующем. Видеосигналы от оптико-электронного датчика физического поля наблюдаемого участка земной поверхности преобразуют в цифровую форму, формируют и запоминают цифровое изображение, выбирают на нем подлежащую селекции цель, формируют пространственный строб цели (ПСЦ) и рамку, охватывающую окно ПСЦ. Размеры рамки и окна ПСЦ адаптивно подстраивают под статистические характеристики цели таким образом, чтобы окно ПСЦ охватывало все изображение цели. Внутри окна ПСЦ и рамки проводят байесовскую классификацию сигналов, заключающуюся в том, что выделяют локальные признаки изображения цели (например, средний уровень яркости восьми ближайших соседей каждого элемента изображения, текстура, псевдочастота, градиент изображения и т.д.), по которым строят совместные гистограммы - одну для окна ПСЦ, другую для рамки - и используют их для оценки совместных функций распределения вероятностей всех локальных признаков. При этом каждому элементу изображения приписывается одно из двух состояний: элемент изображения цели или элемент изображения фона. Классификацию точек изображения в текущем кадре выполняют по статистикам предыдущих кадров, и вычисленные текущие гистограммы усредняют с гистограммами предыдущих кадров. В окне ПСЦ формируют бинарное изображение, на котором единицами помечают элементы изображения цели, а нулями - элементы изображения фона. Затем в районе фона стирают все единицы, у которых меньше восьми ближайших единичных соседей, а всем расположенным в районе цели изолированным нулевым элементам изображения, окруженным восемью единицами, присваивают единичные значения. Из очищенного таким образом бинарного изображения выделяют район цели, которую запоминают в качестве эталонной, определяют ее координаты и используют их в автономном режиме для селекции и сопровождения выделенной цели. В случае временного пропадания цели из поля зрения, в течение заданного фиксированного времени формируют ее прогнозируемые координаты (Бакут П. А., Лабунец В.Г. Телевизионная следящая система с байесовским дискриминатором цели. Зарубежная радиоэлектроника, 1987, N 10, с. 81-93).
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа селекции наземных объектов, является недостаточная точность и надежность селекции малоразмерных объектов на сложных фонах. Это обусловлено тем, что использование байесовской классификации, основанной на статистическом анализе входного изображения в пределах окна анализа, дает устойчивые результаты при минимальном габаритном размере изображения объекта не менее ~ 5 пикc, а его координаты определяются по результатам выбора более надежного признака: яркости или градиентной яркости, и при переключении с режима на режим возможны скачки в управлении, ухудшающие динамику процесса слежения.
Устройство для осуществления описанного способа включает блок оптико-электронного датчика, первый и второй процессорные блоки. Блок оптико-электронного датчика содержит установленную на гиростабилизированной платформе телевизионную камеру, сигнальный выход которой соединен с входом аналого-цифрового преобразователя (АЦП). С гиростабилизированной платформой связан исполнительный двигатель следящей системы устройства.
Первый процессорный блок содержит подключенный первым входом к выходу АЦП блока телекамеры блок кадровой памяти, выход которого связан с входами детекторов признаков, выходы которых соединены с соответствующими входами устройства построения гистограмм, выход которого соединен с входом устройства оценки достоверности слежения, входом фильтра гистограмм и первым входом байесовского классификатора, ко второму и третьему входам которого подключены соответственно выход предсказателя площади цели и первый выход устройства оценки достоверности слежения, который также соединен с первым входом второго процессорного блока. К соответствующим входам устройства построения гистограмм подключены второй выход устройства оценки достоверности слежения и выход фильтра гистограмм. Ко второму входу блока кадровой памяти подключен выход блока управления рамкой и пространственным стробом цели, вход которого, а также вход предсказателя площади цели соединены с первым выходом второго процессорного блока.
Второй процессорный блок содержит соединенный своим входом с выходом байесовского классификатора первого процессорного блока оператор порождения и уничтожения элементов изображения цели, к выходу которого последовательно подключены вычислитель вектора формы районов цели, селектор цели, координатор цели, экстраполятор положения цели, выход которого является вторым выходом второго процессорного блока и соединен с входом исполнительного двигателя блока телекамеры. К выходу оператора порождения и уничтожения элементов изображения цели своим вторым входом подключено устройство перезаписи эталона цели, первый вход которого соединен с первым выходом устройства оценки достоверности слежения первого процессорного блока, а первый и второй выходы подключены соответственно ко второму входу вычислителя вектора формы районов цели и второму входу селектора цели, выход которого также соединен с входом предсказателя размеров следящих окон, выход которого является первым выходом второго процессорного блока и соединен с входом предсказателя площади цели и входом блока управления рамкой и пространственным стробом цели первого процессорного блока (Бакут П.А., Лабунец В.Г. Телевизионная следящая система с байесовским дискриминатором цели. Зарубежная радиоэлектроника, 1987, N 10, с. 81-93).
Характерной особенностью описанного устройства является наличие блока детекторов признаков (БДП). Для повышения надежности выделения изображения объекта (цели) на сложном зашумленном изображении сцены в БДП проводится обработка сигналов для выделения двух признаков: яркостей исходного и градиентного изображений. В блоке построения гистограмм формируются гистограммы яркостей исходного и градиентного изображений, которые после сглаживания фильтром гистограмм используются в байесовском классификаторе для сегментации объекта. Окончательная селекция объекта осуществляется в селекторе цели с использованием дизъюнктивной свертки горизонтальной и вертикальной проекций текущего изображения объекта с соответствующими проекциями эталона. Центральные элементы проекций выделенного изображения используются в качестве координат объекта. Перезапись эталонного изображения объекта выполняется при высоком качестве слежения, в противном случае (например, при малом контрасте, при кратковременном исчезновении, при частичном закрытии объекта) эталон не перезаписывается, а его положение предсказывается экстраполятором положения объекта. Если более надежным признаком является яркость исходного изображения, то устройство работает как контрастная система. Если же более надежным признаком является яркость градиентного изображения, то устройство работает как система совмещения контуров.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного устройства селекции наземных объектов, являются недостаточная точность и надежность селекции малоразмерных объектов на сложных фонах, а также ограниченные функциональные возможности системы. Это обусловлено использованием классификатора только одного типа, а также тем, что наличие только одного информационного (телевизионного) канала позволяет применять данную систему только в дневных условиях.
Основной задачей, на решение которой направлены заявленные варианты способа селекции наземных и воздушных объектов и варианты устройства селекции наземных и воздушных объектов, является расширение их функциональных возможностей путем обеспечения захвата и автосопровождения малоразмерных (при минимальном габаритном размере изображения цели менее 5 пикс) или размерных объектов на сложных фонах и в любое время суток.
Единым техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является повышение точности и надежности селекции наземных, в том числе малоразмерных подвижных, или воздушных объектов на фоне Земли.
Указанный технический результат достигается тем, что в известном способе селекции наземных и воздушных объектов, включающем преобразование в цифровую форму видеосигналов от оптико-электронного датчика физического поля наблюдаемого участка земной поверхности, формирование цифрового изображения этого участка земной поверхности, запоминание цифрового изображения, формирование рамки с окном анализа, байесовскую классификацию цифрового изображения, определение координат объекта и использование их в автономном режиме для селекции и сопровождения выделенного объекта, а в случае временного пропадания объекта из поля зрения формирование в течение заданного фиксированного времени его прогнозируемых координат, согласно изобретению перед преобразованием видеосигналов в цифровую форму осуществляют настройку усиления и смещения видеосигналов, запомненное цифровое изображение в пределах рамки подвергают масштабированию и фильтрации и осуществляют режим захвата, в котором в процессе байесовской классификации изображения формируют структурный образ объекта, гистограммы распределения яркостей изображения, выполняют сегментацию окна анализа, формируют бинарный образ объекта, определяют показатель качества селекции и сравнивают его величину с пороговым значением, при величине показателя качества селекции, меньшей порогового значения, запоминают горизонтальные и вертикальные проекции изображения объекта в качестве эталона и структурный образ объекта в качестве его структурного эталона и переходят в режим автономного сопровождения объекта, в котором одновременно производят байесовскую, структурную и корреляционную классификации изображения, при этом в процессе байесовской классификации по бинарному образу объекта определяют текущие горизонтальные и вертикальные проекции изображения объекта, по которым определяют размеры и координаты объекта, а координаты центра изображения объекта корректируют по результатам свертки текущих и эталонных проекций, в процессе структурной классификации входное цифровое изображение подвергают дифференциальной предварительной обработке, после чего выполняют пороговую сегментацию градиентного изображения, и бинарное изображение кодируют цепным кодом, по значениям кодов выделяют раздельно горизонтальные и вертикальные линии и множество их пересечений, формируют текущую композицию примитивов, в качестве которых берут линии и пересечения, определяют расстояния между линиями и расстояния между пересечениями, положение и расстояние линий и пересечений относительно центра окна анализа, выполняют грамматический разбор текущей композиции примитивов, в результате которого определяют ее принадлежность объекту или его частям, которые проектируют на горизонтальную и вертикальную оси и по проекциям определяют координаты и размеры объекта, а лингвистические переменные, характеризующие степень принадлежности объекту выделенного сочетания примитивов, используют в качестве количественной характеристики качества селекции, в процессе корреляционной классификации выполняют структурную предварительную обработку входного цифрового изображения, в результате которой формируют текущий структурный образ объекта, производят корреляционную классификацию текущего структурного образа объекта, выполняют оценку координат объекта и оценку качества классификации, после чего комплексируют размеры и комплексируют координаты объекта, полученные каждым способом классификации, и получают текущие координаты объекта.
Указанный технический результат достигается тем, что в известном способе селекции наземных и воздушных объектов, включающем преобразование в цифровую форму видеосигналов от оптико-электронного датчика физического поля наблюдаемого участка земной поверхности, формирование цифрового изображения этого участка земной поверхности, запоминание цифрового изображения, формирование рамки с окном анализа, определение координат объекта и использование их в автономном режиме для селекции и сопровождения выделенного объекта, а в случае временного пропадания объекта из поля зрения формирование в течение заданного фиксированного времени его прогнозируемых координат, согласно изобретению перед преобразованием видеосигнала в цифровую форму осуществляют настройку усиления и смещения видеосигнала, запомненное цифровое изображение в пределах рамки подвергают масштабированию и фильтрации и осуществляют режим захвата малоразмерного объекта, в котором производят кластерный анализ, при котором входное цифровое изображение кластеризуют на примерно однородные по яркости области, производят сегментацию изображения в окне анализа, определяют размеры и контрастную яркость объекта и переходят в режим автономного сопровождения малоразмерного объекта, в котором производят морфологическую классификацию изображения, при которой определяют наличие границ фона в окне анализа, по размеру и форме изображения формируют структурирующий элемент множества яркостей, посредством которого исходное множество яркостей в окне анализа замыкают, либо размыкают, затем формируют бинарный образ объекта, по которому оценивают качество селекции и получают текущие координаты объекта.
Указанный технический результат достигается тем, что в известном способе селекции наземных и воздушных объектов, включающем преобразование в цифровую форму видеосигналов от оптико-электронного датчика физического поля наблюдаемого участка земной поверхности, формирование цифрового изображения этого участка земной поверхности, запоминание цифрового изображения, формирование рамки с окном анализа, байесовскую классификацию цифрового изображения, определение координат объекта и использование их в автономном режиме для селекции и сопровождения выделенного объекта, а в случае временного пропадания объекта из поля зрения формирование в течение заданного фиксированного времени его прогнозируемых координат, согласно изобретению преобразование в цифровую форму видеосигналов осуществляют от n оптико-электронных датчиков, работающих в различных спектральных диапазонах излучения, одновременно в n каналах обработки, в каждом из которых перед преобразованием видеосигналов в цифровую форму осуществляют настройку усиления и смещения видеосигналов, запомненное цифровое изображение в пределах рамки подвергают масштабированию и фильтрации и осуществляют режим захвата, в котором в процессе байесовской классификации изображения формируют структурный образ объекта, гистограммы распределения яркостей изображения, выполняют сегментацию окна анализа, формируют бинарный образ объекта, определяют показатель качества селекции и сравнивают его величину с пороговым значением, при величине показателя качества селекции, меньшей порогового значения, запоминают горизонтальные и вертикальные проекции изображения объекта в качестве эталона и структурный образ объекта в качестве его структурного эталона и переходят в режим автономного сопровождения объекта, в котором одновременно производят байесовскую, структурную и корреляционную классификации изображения, при этом в процессе байесовской классификации по бинарному образу объекта определяют текущие горизонтальные и вертикальные проекции изображения объекта, по которым определяют размеры и координаты объекта, а координаты центра изображения объекта корректируют по результатам свертки текущих и эталонных проекций, в процессе структурной классификации входное цифровое изображение подвергают дифференциальной предварительной обработке, после чего выполняют пороговую сегментацию градиентного изображения и бинарное изображение кодируют цепным кодом, по значениям кодов выделяют раздельно горизонтальные и вертикальные линии и множество их пересечений, формируют текущую композицию примитивов, в качестве которых берут линии и пересечения, определяют расстояния между линиями, расстояния между пересечениями, положение и расстояние линий и пересечений относительно центра окна анализа, выполняют грамматический разбор текущей композиции примитивов, в результате которого определяют ее принадлежность объекту или его частям, которые проектируют на горизонтальную и вертикальную оси и по проекциям определяют координаты и размеры объекта, а лингвистические переменные, характеризующие степень принадлежности объекту выделенного сочетания примитивов, используют в качестве количественной характеристики качества селекции, в процессе корреляционной классификации выполняют структурную предварительную обработку входного цифрового изображения, в результате которой формируют текущий структурный образ цели, производят корреляционную классификацию текущего структурного образа объекта, выполняют оценку координат объекта и оценку качества классификации, комплексируют размеры и комплексируют координаты объекта, полученные каждым способом классификации и получают текущие координаты объекта, после чего производят комплексирование координат объекта, полученных в каждом из n каналов обработки, и получают текущие координаты объекта.
Указанный технический результат достигается тем, что в известное устройство селекции наземных и воздушных объектов, содержащее оптико-электронный датчик, аналого-цифровой преобразователь, блок кадровой памяти, устройство управления рамкой, байесовский классификатор, согласно изобретению введены блок предварительной обработки видеосигнала, блок настройки усиления и смещения, блок масштабирования и фильтрации, блок оценки сепарабельности изображения, блок настройки структуры и параметров селектора, блок захвата, морфологический классификатор, структурный классификатор, корреляционный классификатор, блок комплексирования размеров, блок оценки значимости классификации, блок комплексирования координат, блок принятия решения, при этом оптико-электронный датчик, блок предварительной обработки видеосигнала, аналого-цифровой преобразователь, блок кадровой памяти, блок масштабирования и фильтрации, блок настройки структуры и параметров селектора включены последовательно, второй вход блока кадровой памяти соединен с выходом блока управления рамкой, выход блока масштабирования и фильтрации соединен также с входом блока настройки усиления и смещения и входом блока оценки сепарабельности изображения, выход первого из которых подключен ко второму входу блока предварительной обработки видеосигнала, а выход второго - ко второму входу блока настройки структуры и параметров селектора, первый выход которого соединен в режиме захвата размерного объекта с первым входом байесовского классификатора, второй выход соединен в режиме автономного сопровождения размерного объекта со вторым входом байесовского, входом структурного и первым входом корреляционного классификаторов, третий выход соединен в режиме прогнозирования координат объекта со вторым входом корреляционного классификатора, первый выход байесовского классификатора подключен к третьему входу блока настройки структуры и параметров селектора, второй выход - к третьему входу корреляционного классификатора, третий выход - к первому входу блока комплексирования размеров, четвертый выход - к первому входу блока оценки значимости классификации, пятый выход - к первому входу блока комплексирования координат, первый выход структурного классификатора подключен ко второму входу блока комплексирования размеров, второй выход - ко второму входу блока оценки значимости классификации, третий выход - ко второму входу блока комплексирования координат, первый выход корреляционного классификатора подключен к третьему входу блока оценки значимости классификации, второй выход - к третьему входу блока комплексирования координат, третий выход - к четвертому входу блока настройки структуры и параметров селектора, выход блока комплексирования размеров подключен к первому входу блока управления рамкой, через второй и третий входы которого вводится цифровая информация о типе объекта и код дальности, первый выход блока оценки значимости классификации подключен к первому входу блока принятия решения, второй выход - к третьему входу блока комплексирования размеров, третий выход - к четвертому входу корреляционного классификатора, четвертый выход - к четвертому входу блока комплексирования координат, выход которого подключен ко второму входу блока принятия решения, третий вход которого соединен с третьим выходом блока настройки структуры и параметров селектора, четвертый выход которого соединен в режиме захвата малоразмерного объекта с входом блока захвата, выход которого подключен к пятому входу блока настройки структуры и параметров селектора, пятый выход которого соединен в режиме автономного сопровождения малоразмерного объекта с входом морфологического классификатора, первый выход которого подключен к шестому входу блока настройки структуры и параметров селектора, а второй и третий выходы подключены к четвертому и пятому входам блока принятия решения, первый и второй выходы которого являются выходами устройства.
Байесовский классификатор содержит первый блок структурной предварительной обработки, блок записи структурного эталона, последовательно включенные блок формирования гистограмм, блок локальной сегментации, блок формирования бинарного образа, первый блок оценки координат и размеров, блок свертки проекций, последовательно включенные первый блок оценки качества, блок смены эталонных проекций, при этом первый и второй входы блока формирования гистограмм являются входами байесовского классификатора, причем с первым входом соединен вход первого блока структурной предварительной обработки, выход которого подключен ко второму входу блока записи структурного эталона, к выходу блока формирования бинарного образа также подключен вход первого блока оценки качества, к выходу которого также подключены первый вход блока записи структурного эталона и вход блока смены эталонных проекций, к выходу которого подключен второй вход блока свертки проекций, при этом выход первого блока оценки качества является также первым и четвертым выходами байесовского классификатора, выход блока записи структурного эталона является его вторым выходом, а выходы блока свертки проекций - его третьим и пятым выходами.
Структурный классификатор содержит второй блок оценки координат и размеров и последовательно включенные блок дифференциальной предварительной обработки, блок сегментации, блок оценки структурных примитивов, блок оценки композиции примитивов, блок грамматического разбора и второй блок оценки качества, при этом к выходу блока грамматического разбора подключен также вход второго блока оценки координат и размеров, вход блока дифференциальной предварительной обработки является входом структурного классификатора, выходы второго блока оценки координат и размеров являются его первым и третьим выходами, а выход второго блока оценки качества - его вторым выходом.
Корреляционный классификатор содержит последовательно включенные второй блок структурной предварительной обработки, блок корреляционной привязки, блок оценки координат, третий блока оценки качества, блок смены эталона, при этом выход блока смены эталона подключен ко второму входу блока корреляционной привязки, входы второго блока структурной предварительной обработки являются первым и вторым входами корреляционного классификатора, второй и третий входы блока смены эталона являются соответственно его третьим и четвертым входами, выходы третьего блока оценки качества являются первым и третьим выходами корреляционного классификатора, а выход блока оценки координат является также его вторым выходом.
Блок захвата содержит последовательно включенные блок кластерного анализа, блок сегментации изображения, блок формирования данных, при этом вход блока кластерного анализа является входом блока захвата, а выход блока формирования данных - его выходом.
Морфологический классификатор содержит блок идентификации границ, блок оценки координат, последовательно включенные блок структуризации множества яркостей, блок выделения пиков или долин, блок выделения объекта, четвертый блок оценки качества, блок уточнения параметров объекта, при этом вход блока структуризации множества яркостей является входом морфологического классификатора и с ним соединен вход блока идентификации границ, выход которого подключен ко второму входу блока выделения объекта, к выходу которого также подключен вход блока оценки координат, выход которого является вторым выходом морфологического классификатора, выход четвертого блока оценки качества является также его третьим, а выход блока уточнения параметров объекта - его первым выходом.
Указанный технический результат достигается тем, что в известное устройство селекции наземных и воздушных объектов, содержащее оптико-электронный датчик, аналого-цифровой преобразователь, блок кадровой памяти, устройство управления рамкой, байесовский классификатор, согласно изобретению введены объединенные в n идентичных каналов (n-1) оптико-электронных датчиков, (n-1) аналого-цифровых преобразователей, (n-1) блоков кадровой памяти, (n-1) устройств управления рамкой, (n-1) байесовских классификаторов, n блоков предварительной обработки видеосигналов, n блоков настройки усиления и смещения, n блоков масштабирования и фильтрации, n блоков оценки сепарабельности изображения, n блоков настройки структуры и параметров селектора, n блоков захвата, n морфологических классификаторов, n структурных классификаторов, n корреляционных классификаторов, n блоков комплексирования размеров, n блоков оценки значимости классификации, n блоков комплексирования координат, блок межканального комплексирования координат, блок принятия решения, причем в каждом из n каналов оптико-электронный датчик, блок предварительной обработки видеосигнала, аналого-цифровой преобразователь, блок кадровой памяти, блок масштабирования и фильтрации, блок настройки структуры и параметров селектора включены последовательно, второй вход блока кадровой памяти соединен с выходом блока управления рамкой, выход блока масштабирования и фильтрации соединен также с входом блока настройки усиления и смещения и входом блока оценки сепарабельности изображения, выход первого из которых подключен ко второму входу блока предварительной обработки видеосигнала, а выход второго - ко второму входу блока настройки структуры и параметров селектора, первый выход которого соединен в режиме захвата размерного объекта с первым входом байесовского классификатора, второй выход соединен в режиме автономного сопровождения размерного объекта со вторым входом байесовского, входом структурного и первым входом корреляционного классификаторов, третий выход соединен в режиме прогнозирования координат со вторым входом корреляционного классификатора, первый выход байесовского классификатора подключен к третьему входу блока настройки структуры и параметров селектора, второй выход - к третьему входу корреляционного классификатора, третий выход - к первому входу блока комплексирования размеров, четвертый выход - к первому входу блока оценки значимости классификации, пятый выход - к первому входу блока комплексирования координат, первый выход структурного классификатора подключен ко второму входу блока комплексирования размеров, второй выход - ко второму входу блока оценки значимости классификации, третий выход - ко второму входу блока комплексирования координат, первый выход корреляционного классификатора подключен к третьему входу блока оценки значимости классификации, второй выход - к третьему входу блока комплексирования координат, третий выход - к четвертому входу блока настройки структуры и параметров селектора, выход блока комплексирования размеров подключен к первому входу блока управления рамкой, через второй и третий входы которого вводится цифровая информация о типе объекта и код дальности, второй выход блока оценки значимости классификации подключен к третьему входу блока комплексирования размеров, третий выход - к четвертому входу корреляционного классификатора, четвертый выход - к четвертому входу блока комплексирования координат, четвертый выход блока настройки структуры и параметров селектора соединен в режиме захвата малоразмерного объекта с входом блока захвата, выход которого подключен к пятому входу блока настройки структуры и параметров селектора, пятый выход которого соединен в режиме автономного сопровождения малоразмерного объекта с входом морфологического классификатора, первый выход которого подключен к шестому входу блока настройки структуры и параметров селектора, при этом первый выход блока оценки значимости классификации, выход блока комплексирования координат, второй и третий выходы морфологического классификатора являются первым, вторым, третьим и четвертым выходами i-гo канала (где i = 1.2.3...n), которые подключены к входам блока межканального комплексирования координат, выход которого соединен с первым входом блока принятия решения, к (i + 1)-му входу которого подключен третий выход блока настройки структуры и параметров селектора, являющийся пятым выходом i-гo канала, а первый и второй выходы блока принятия решения являются выходами устройства.
Заявленные варианты способа селекции наземных и воздушных объектов и варианты реализующего их устройства обеспечивают повышение надежности и точности селекции за счет настройки усиления и смещения видеосигнала в каждом текущем кадре, одновременного (параллельного) проведения байесовской, структурной и корреляционной классификаций размерного объекта и взвешенного комплексирования их результатов с учетом качества классификаций. Введение кластерного анализа и морфологической классификации обеспечивает надежную селекцию за счет использования пространственных и яркостных признаков малоразмерных объектов. Вариант способа селекции наземных и воздушных объектов и соответствующее устройство с несколькими одновременно работающими спектрозональными оптико-электронными датчиками обеспечивают всепогодность и всесуточность его применения.
Проведенный заявителем анализ уровня техники показал, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленных вариантов способа селекции наземных и воздушных объектов и вариантов устройства селекции наземных и воздушных объектов, отсутствуют. Следовательно, каждое из заявленных изобретений соответствует условию патентоспособности "новизна". Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками каждого изобретения на достижение указанного технического результата. Следовательно, каждый из заявленных вариантов изобретений соответствует условию патентоспособности "изобретательский уровень", т.к. технические решения не следуют явным образом из уровня техники.
В настоящей заявке на выдачу патента соблюдено требование единства изобретения, поскольку одно изобретение группы (способ) предназначено для использования в другом (устройстве). При этом варианты изобретений относятся к объектам одного вида, одинакового назначения и обеспечивают получение одного и того же технического результата.
Изобретения поясняются чертежами, на которых представлены: фиг. 1 - структурная схема 1-го варианта устройства селекции наземных и воздушных объектов; на фиг. 2 - структурная схема байесовского классификатора; на фиг. 3 - структурная схема структурного классификатора; на фиг. 4 - структурная схема корреляционного классификатора; на фиг. 5 - структурная схема блока захвата; на фиг. 6 - структурная схема морфологического классификатора; на фиг. 7 - структурная схема 2-го варианта устройства селекции наземных и воздушных объектов.
Способ селекции наземных и воздушных объектов заключается в следующем.
Видеосигналы от оптико-электронного датчика физического поля наблюдаемого участка земной поверхности подвергают предварительной обработке - дискретизации по пространственным координатам, усилению и смещению, настройка которых производится в каждом кадре с целью оптимального использования динамического диапазона яркостей точек изображения для селекции объекта. Основная проблема, возникающая при настройке усиления и смещения, заключается в том, что отдельные точки изображения при направленной подсветке могут бликовать, в результате чего динамический диапазон яркости в поле анализа оценивается неадекватно по отношению к множеству всех остальных точек, непосредственно определяющих тональность всего изображения. Наличие бликов неоправданно расширяет динамический диапазон яркостей точек изображения, что приводит к заниженным установкам коэффициентов усиления и смещения в усилительном тракте при предварительной обработке видеосигнала и к снижению общей контрастной заметности объекта. Влияние бликов уменьшится, если определять динамический диапазон яркостей не по всему полю анализа, а в локальных зонах, совпадающих, например, с левой (л), верхней (в), правой (п) и нижней (н) половинами окна анализа. Пусть ΔLi = Li max - Li min, где i∈{л,в,п,н}. Определим  и используем ее в качестве оценки динамического диапазона яркости точек изображения для настройки видеоканалов, которую выполняют следующим образом.
и используем ее в качестве оценки динамического диапазона яркости точек изображения для настройки видеоканалов, которую выполняют следующим образом.
Сначала регистрируют изображение в полукадре при некоторых номинальных значениях коэффициентов усиления и смещения тракта предварительной обработки видеосигнала. По этому изображению определяют величину ΔLk. Если ΔLk < 256, то новый коэффициент усиления kн у выражается через старый kст у зависимостью
kн у = kст у + bу (ΔLk) (1)
где bу (ΔLk) - шаг изменения усиления.
Новый коэффициент смещения kн с выражается через старый kст с зависимостью
где  - шаг изменения смещения.
- шаг изменения смещения.
Величина  характеризует отклонение средней яркости изображения в полукадре от середины полного динамического диапазона в 256 уровней. Очередной полукадр регистрируют с новыми установками усиления и смещения, и процесс настройки тракта повторяется. Настройка заканчивается, если
характеризует отклонение средней яркости изображения в полукадре от середины полного динамического диапазона в 256 уровней. Очередной полукадр регистрируют с новыми установками усиления и смещения, и процесс настройки тракта повторяется. Настройка заканчивается, если
por1 ≅ 255 - ΔLk ≅ por2, (3)
где por1, por2 - принятые пороговые значения.
Затем видеосигнал преобразуют в цифровую форму. При этом каждый кадр цифрового изображения представляет собой множество { i, j} точек пространственного разложения поля зрения с квантованным по уровню значением яркости L(i, j) в каждой точке. По внешней информации (вводимой оператором) о типе объекта, дальности до него или текущей информации о размерах изображения объекта формируют рамку с окном анализа. В каждом кадре изображение позиционируется относительно прогнозируемого положения объекта.
Информацию в пределах этого окна запоминают, хранят в течение кадра и производят масштабирование и фильтрацию шума изображения. При этом оценивается сепарабельность входного изображения, под которой понимается совокупность необходимых (но недостаточных) условий для последующей локализации объекта как компактного образования, частично или полностью отделенного границами от окружающего фона. Определим сепарабельность сцены SE как
где Kr = 1-exp(-β1•(ν/ν0)2) - структурная различимость;
β1 = 0,7 - масштабный коэффициент, сдвигающий рабочую точку по оси ν;
ν - число строк растра, соответствующих размеру цели;
ν0 - число линий разрешения, обеспечивающих 50%-ную вероятность различения (распознавания) цели (по Джонсону);
Kzi = ρiexp(-2•ksi) - локальная (в краевых окнах) контрастная заметность;
ρi - отношение "полезный сигнал/шум" в краевых окнах;
ksi - сложность фона в краевых окнах.
Величину ρi на пестром фоне определяют по следующему алгоритму:
где Ps - мощность полезного сигнала;
σsh - среднеквадратичное отклонение шума аппаратуры.

где  - средние яркости точек, принадлежащих объекту и фону соответственно;
- средние яркости точек, принадлежащих объекту и фону соответственно;
Do, DF - дисперсии яркостей точек, принадлежащих объекту и фону соответственно;
Dsh - дисперсия шумов аппаратуры.
Величину ksi определяют по следующему алгоритму:
1. Фильтрованное изображение дифференцируют для выделения границ (например, обрабатывают маской Собела). В результате такого преобразования каждая точка изображения с яркостью Lij отображается в точку градиентного изображения с яркостью Gij и точку бинарного изображения Bij со значением "0" или "1" в зависимости от того, обнаружен в данной точке перепад яркостей или нет.
2. Для каждой точки матриц Bij и Gij в окне 3х3 элемента строят функцию Розенфельда:

3. Определяют функционал Ф(Tij Qij) в виде произведения величин Tij и Qij:
Ф(TijQij) = TijlgQij. (9)
4. Определяют среднюю мощность функционала Ф(Tij Qij):
5. За показатель сложности изображения ksi, в i-м краевом окне принимают величину
Величина SE количественно характеризует совокупность необходимых условий для локализации искомого объекта. Достаточные условия формируются алгоритмом селеции. Чем более сепарабельным является входное изображение, тем более простыми средствами может быть локализован искомый объект.
Далее настраивают структуру и параметры селекции объекта. По величине сепарабельности SE определяют параметр сглаживания рекурсивных фильтров w = exp(-3 SE) и настраивают порог сегментации байесовской классификации fm = f(2 - SEm), {m}= {л, п, в, н}.
В зависимости от режима работы классификацию изображения осуществляют по-разному. В режиме захвата размерного объекта производят только байесовскую классификацию. В режиме автосопровождения размерного объекта производят параллельно байесовскую, структурную и корреляционную классификации, а при нарушении режима автосопровождения (при плохом качестве селекции объекта) - только корреляционную.
В режиме захвата объекта байесовскую классификацию производят следующим образом. В процессе структурной предварительной обработки изображения формируют структурный образ объекта для корреляционной привязки, для чего изображение фильтруют и преобразуют по алгоритму:
1. Каждую точку входного изображения с яркостью Lij отображают в точку градиентного изображения с яркостью Gij и точку бинарного изображения Bij со значением 0 или 1 в зависимости от того, обнаружен в данной точке перепад яркостей или нет.
2. Для каждой точки матриц Bij и Gij в окне 3х3 элемента строят функцию Розенфельда по формулам (7, 8).
3. Определяют структурную характеристику точки
kuj=TijlgQij. (12)
Формируют гистограммы распределения яркостей раздельно по пространственным областям: центральной области окна анализа, содержащей преимущественно точки изображения объекта, и гистограммы в краевых окнах раздельно слева, сверху, справа и снизу от центральной области. При построении гистограмм для каждой области i назначают свою группу счетчиков gi n(k) общим числом n, совпадающим с числом градаций яркостей на изображении. При просмотре изображения в каждом кадре k счетчику с номером, совпадающим со значением яркости, добавляют единицу. Полученные гистограммы сглаживают по номеру n внутри кадра и по номеру кадра k при межкадровом сглаживании:

Производят сегментацию окна анализа независимо по отношению к каждому краевому окну. Обозначим через ОА множество точек в окне анализа, через OO - множество точек в области объекта (центральной части окна анализа), через Fi - множество точек в i-м краевом окне. Классификацию точек изображения в области анализа ОА выполняют следующим образом:
где no, nF - количество точек, принадлежащих соответственно объекту и фону.
Значение A = 2 соответствует классификации по максимуму апостериорной вероятности. При A > 2 увеличивается число точек объекта, ошибочно принятых за точки фона (пропуск точек объекта), при A < 2 возрастает число точек фона, ошибочно принятых за точки объекта (ложные тревоги). Полагая, что в центре окна анализа расположены точки, преимущественно принадлежащие объекту, можно принять A = 1,5, что уменьшит вероятность пропуска точек объекта в области, где они заведомо должны присутствовать. В области, где объект может быть или не быть, параметр A целесообразно принять равным 2. В той части окна анализа, где преимущественно расположены точки фона, этот параметр можно принять равным 2,5 (штраф за ложные тревоги увеличивается). Множитель (2-SEi) отражает адаптивный характер байесовской классификации со стороны каждого краевого окна.
Бинарный образ объекта формируют путем объединения и пересечения частных результатов классификации. По бинарному образу определяют текущие проекции плоского изображения по горизонтали  и вертикали
и вертикали 
По результатам сегментации окна анализа формируют показатель качества:
где m - число точек в области объекта, выделенных как точки, принадлежащие объекту;
Rх, Rу - оценки размеров объекта;
Sоо - площадь области объекта.
Переход от режима захвата к режиму автосопровождения производят при условии, что величина G < por. При этом в момент перехода запоминают горизонтальную и вертикальную проекции изображения объекта в качестве эталона и структурный эталон объекта. Для большей устойчивости проекции предварительно сглаживают в пределах одного кадра по переменным i и j
P'х(j) = 0,5 • P'х(j-1)+0,5•Pх(j), (17)
P'y(i) = 0,5 • P'у(i-1)+0,5•Pу(i), (18)
и между соседними кадрами
P''хn(j)=(1-W)•P''хn-1(j)+W•P'xn(j). (19)
P''yn(i)=(1-W)•P''yn-1(i)+W•P'yn(i) (20)
Координаты центра изображения объекта определяют из соотношений:


Размеры изображения объекта определяют также по проекциям. Алгоритм оценки проекций состоит в следующем:
- каждую нормированную проекцию делят на восемь равных частей с координатами (i1, i2,...,i8):
- определяют интервальную величину Roj = j7 - j1, Roi = i7 - i1;
- определяют размер объекта Rх =1,25Roj, Rу = 1,25Roi;
- определяют сглаженные размеры объекта

Координаты центра изображения объекта корректируют по результатам свертки текущих и эталонных проекций. Эталонные проекции обозначим через  Свертку текущей и эталонной проекции выполняют по правилу:
Свертку текущей и эталонной проекции выполняют по правилу:
Если положение центра эталонной проекции не совпадает с центром текущей проекции, то координаты центра изображения объекта корректируют на величину этого расхождения. Эталонные проекции в процессе работы селектора обновляют. Разрешение на обновление эталонных проекций формируют по оценкам качества селекции. При хорошем качестве селекции запоминают эталонные проекции и запоминают структурный эталон. В режиме захвата свертку проекций не выполняют.
В режиме автосопровождения одновременно с байесовской осуществляют структурную и корреляционную классификации.
Структурная классификация заключается в следующем. Входное изображение подвергают дифференциальной предварительной обработке. Яркость в точке с координатами (i, j) градиентного изображения определяют по правилу
Gij = 8Lij - (Li-1,j-1 + Li-1,j + Li-1,j+1 + Li,j+1 + Li,j-1 + Li+1,j-1 + Li+1,j + Li+1,j+1). (28)
Краевые эффекты устраняют путем расширения окна анализа на два элемента в каждом направлении с последующим выбрасыванием краевых точек.
Выполняют пороговую сегментацию градиентного изображения
Бинарное изображение кодируют цепным кодом. По значениям кодов выделяют раздельно горизонтальные и вертикальные линии и множество точек пересечения горизонтальных и вертикальных линий. В качестве примитивов рассматриваются линии и точки пересечения. По текущей композиции примитивов определяют расстояния между линиями, расстояния между точками пересечений, положение и расстояние линий и точек пересечений относительно центра окна анализа. Затем выполняют грамматический разбор текущей композиции примитивов в виде логических высказываний, определяющих объект и его составные части через выделенные примитивы. В результате разбора делают вывод о принадлежности текущей композиции примитивов объекту или его частям. Выделенную композицию примитивов проектируют на оси X и Y и по проекциям определяют координаты и размеры объекта с учетом взаимного положения его составных частей (аналогично обработке по формулам 17-25 байесовской классификации), а лингвистические переменные, характеризующие степень принадлежности выделенного сочетания примитивов объекту, отображают в количественные характеристики результатов селекции.
Корреляционную классификацию выполняют в следующей последовательности. Производят структурную предварительную обработку входного изображения (по вышеприведенному алгоритму, см. (7)-(11)). Выполняют привязку эталона и текущего структурного образа:
где  - значение структурной характеристики в точке эталонного образа.
- значение структурной характеристики в точке эталонного образа.
Далее выполняют оценку координат точки привязки, для чего корреляционную поверхность секут на уровне Kmin + 0,1(Kmax - Kmin). Всем точкам поверхности выше этого уровня присваивают значение 1. В сечении выделяют связные области и определяют число точек в каждой из них. За точку привязки принимается центр области, расположенной ближе всех к центру окна анализа.
Производят оценку качества привязки:
где n - общее число точек в сечении корреляционной поверхности;
m - число точек в области, выделенной как искомый объект.
Размеры и координаты объекта, полученные в результате байесовской, структурной и корреляционной классификаций, комплексируют:
Rx = λ1• Rx1+ λ2• Rx2, (32)
Ry = λ1• Ry1+ λ2• Ry2; (33)
xz = γ1• xz1+ γ2• xz2+ γ3• xz3, (34)
yz = γ1• yz1+ γ2• yz2+ γ3• yz3. (35)
Весовые коэффициенты λ1,λ2,γ1,γ2,γ3 определяются по оценкам качества селекции в каждой классификации.
Информативность каналов обработки оценивают по частным оценкам "правильности" классификации изображения в данном канале. Обозначим через δ характеристику "значимости" канала обработки и выразим ее через оценку качества классификации различными параллельно работающими классификаторами в форме  Аналогично примем
Аналогично примем  Тогда
Тогда  i = 1, 2, 3.
i = 1, 2, 3.
Здесь предполагается, что значения δ∈[0,1]. Квадратичная зависимость наибольший вес придает наиболее правильному результату классификации. По результату оценки значимости канала формируют управляющий сигнал для смены эталона в канале корреляционной классификации. На основе оценки значимости каналов классификации и комплексированных координат вычисляют текущие координаты объекта при его устойчивой селекции. При нарушении режима слежения (плохом качестве селекции цели) решение принимают по корреляционной привязке текущего изображения объекта в расширенном поле анализа и вычисляют его прогнозируемые координаты.
Второй вариант способа селекции наземных и воздушных объектов отличается от первого тем, что в случае селекции малоразмерных объектов (минимальный габаритный размер изображения объекта меньше 5 пикс) после настройки структуры и параметров селекции объекта вместо байесовской, структурной и корреляционной классификаций изображения осуществляют его кластерный анализ и морфологическую классификацию.
Кластерный анализ изображения объекта выполняют следующим образом. Входное изображение кластеризуют на области, примерно однородные по яркости. Каждая точка (i,j) изображения в окне анализа ОА, i,j∈OA рассматривается как выборочный образ Lij∈L. Пусть Zn, n∈N, dim N = 10 - множество центров кластеров,  - расстояние точки Lij от n-го центра кластера. За центр первого кластера принимают яркостную точку в центре i0,j0 окна анализа,
- расстояние точки Lij от n-го центра кластера. За центр первого кластера принимают яркостную точку в центре i0,j0 окна анализа,  . В первом цикле в пространстве яркостей определяют наиболее удаленную точку Lk1 от выбранного центра кластеризации
. В первом цикле в пространстве яркостей определяют наиболее удаленную точку Lk1 от выбранного центра кластеризации  Если это расстояние больше некоторого порога, то такая точка берется за второй центр кластеризации Z2 = Lk1. В следующем цикле определяют расстояние каждого яркостного образа от этих центров и выбирают минимальное из них max(min(r1,r2)), характеризующее наиболее удаленную точку среди тех, что были отнесены к определенному кластеру. Если это расстояние больше определенной величины, выраженной в долях расстояния между кластерами Z1, Z2 то такая точка назначается центром третьего кластера Z3, и процесс кластеризации повторяется уже для трех кластеров и т.д. Заканчивается он тогда, когда максимальное расстояние среди всех кластеров окажется ниже порога
Если это расстояние больше некоторого порога, то такая точка берется за второй центр кластеризации Z2 = Lk1. В следующем цикле определяют расстояние каждого яркостного образа от этих центров и выбирают минимальное из них max(min(r1,r2)), характеризующее наиболее удаленную точку среди тех, что были отнесены к определенному кластеру. Если это расстояние больше определенной величины, выраженной в долях расстояния между кластерами Z1, Z2 то такая точка назначается центром третьего кластера Z3, и процесс кластеризации повторяется уже для трех кластеров и т.д. Заканчивается он тогда, когда максимальное расстояние среди всех кластеров окажется ниже порога  В результате получают множество из n центров кластеризации { Zn}. Для этих центров выполняют первый цикл кластеризации и определяют групповые средние в каждом кластере. Если Sn - множество точек n-го кластера, то групповые средние
В результате получают множество из n центров кластеризации { Zn}. Для этих центров выполняют первый цикл кластеризации и определяют групповые средние в каждом кластере. Если Sn - множество точек n-го кластера, то групповые средние  Эти групповые средние сравнивают с текущими центрами. Если расстояние между любым из центров и групповым средним больше порога
Эти групповые средние сравнивают с текущими центрами. Если расстояние между любым из центров и групповым средним больше порога  , то старые центры заменяют групповыми средними
, то старые центры заменяют групповыми средними  и процесс кластеризации повторяют. Итерации заканчивают, когда расстояние между всеми новыми и старыми центрами будет меньше порога
и процесс кластеризации повторяют. Итерации заканчивают, когда расстояние между всеми новыми и старыми центрами будет меньше порога  Относительно центров кластеризации {Zn} строят кластер-карту изображения K, у которой яркости точек замещаются номерами кластеров
Относительно центров кластеризации {Zn} строят кластер-карту изображения K, у которой яркости точек замещаются номерами кластеров  : если Lij∈Sn, то Kij = n.
: если Lij∈Sn, то Kij = n.
Затем производят сегментацию изображения в окне анализа: для каждого кластера n∈N нумеруются связные области путем построчного просмотра кластер-карты и отображения ее в карту номеров четырехсвязных областей К ---> R. После этого формируют исходные данные для морфологической классификации: определяют размеры и контрастную яркость объекта со знаком. Для каждой области с номером k:U(k) = 0 определяют размеры описывающего прямоугольника Rxk, Ryk и координаты его центра xzk, yzk. Если минимальный размер какой-либо области min(Rxk, Ryk) на два пикселя больше или меньше, чем минимальный размер, заданный в результате обрамления объекта, то такие области выбрасываются. Для оставшихся областей определяют расстояние от центра окна анализа  За искомую область принимают ближайшую к центру окна анализа
За искомую область принимают ближайшую к центру окна анализа  Если расстояние rl > por, то операцию захвата объекта повторяют.
Если расстояние rl > por, то операцию захвата объекта повторяют.
Размеры ближайшей к центру области отождествляются с размерами Rx, Ry описывающего прямоугольника Ml = Rx • Ry. Для установления знака контрастной яркости относительно центра области Ml выделяют прямоугольную область  Для всех точек этих областей подсчитывают сумму яркостей
Для всех точек этих областей подсчитывают сумму яркостей
Контрастную яркость выделенной области определяют как
Морфологическую классификацию производят в следующей последовательности.
Определяют наличие границ в окне анализа. Обозначим через  перепады яркостей справа-слева и сверху-снизу соответственно.
перепады яркостей справа-слева и сверху-снизу соответственно.
Если |ΔL1|>por и signΔL1 = signVxthen Pgx = 1;
Если |ΔL2|>por и signΔL2 = signVythen Pgy = 1.
По размеру и форме изображения объекта формируют структурирующий элемент множества яркостей. В зависимости от знака контрастной яркости изображения объекта исходное множество яркостей в окне анализа либо замыкается посредством структурирующего элемента, либо размыкается. Обозначим через Rx, Ry размеры объекта в пикселях соответственно в вертикальном и горизонтальном направлениях. По этим размерам определяются два структурирующих множества B1(k), В2(l) в форме вертикально и горизонтально ориентированных линеек, содержащих в центре опорные элементы B1(0), В2(0). Переменные (k, l) указывают на величину смещения элементов структурирующего множества относительно опорного элемента. Диапазон изменения индексов (k, l) принимается равным  Наращение и эрозия многоуровневого множества яркостей на изображении выполняются последовательно сначала по строкам изображения, а затем по столбцам. Опорный элемент структурирующего множества последовательно помещают в каждую точку (i,j) изображения. При наращении яркость в точке (i,j) замещается наибольшей яркостью среди тех точек изображения, которые покрывают элементы структурирующих множеств B1(k), В2(l).
Наращение и эрозия многоуровневого множества яркостей на изображении выполняются последовательно сначала по строкам изображения, а затем по столбцам. Опорный элемент структурирующего множества последовательно помещают в каждую точку (i,j) изображения. При наращении яркость в точке (i,j) замещается наибольшей яркостью среди тех точек изображения, которые покрывают элементы структурирующих множеств B1(k), В2(l).


В результате наращения все темные пятна, которые покрывают структурирующие множества B1(k), B2(l), затираются, а само изображение становится более светлым.
При эрозии яркость в точке (i,j) замещается наименьшей яркостью среди тех точек изображения, которые покрывают элементы структурирующих множеств B1(k), В2(l).


Эрозия затирает светлые пятна на изображении, если их размер меньше, чем размер структурирующих множеств. Эрозия наращения замыкает многоуровневое множество, устраняя все малоразмерные темные пятна в пределах окна анализа. Наращение эрозии размыкает это множество, подавляя локальные светлые пятна и перешейки между ними. Локальные светлые пятна на изображении образуют пики многоуровневого множества, а темные пятна - его долины.
Пики или долины многоуровневого множества выделяют так. Если цель светлее фона, то при ее селекции следует искать пики, а если темнее - долины. При выделении долин (темных локальных пятен) из замыкания вычитают исходное изображение.


В результате этой операции выделяются малоразмерные темные пятна (долины изображения), яркости которых инвертируются.
При выделении пиков (светлых локальных пятен) из исходного изображения вычитают его размыкание.


После такого вычитания на изображении сохранятся лишь светлые малоразмерные пятна.
Далее производят выделение объекта, для чего полученные изображения в пределах окна анализа ОА бинаризируют по правилу:
В результате этой операции все малоразмерные фрагменты с яркостью ниже пороговой устраняются, а среди оставшихся нумеруются все связные образования. Размеры пронумерованных областей отождествляются с размерами описанных прямоугольников, а координаты центров - с положением центра тяжести каждой из них. Если таких связных областей несколько, то за искомый объект принимают область, ближайшую к центру окна анализа, и для нее определяют знак контрастной яркости. В очередном кадре будут выделяться либо пики на многоуровневом множестве яркостей, если объект ярче фона, либо долины, если объект темнее фона.
Далее оценивают качество селекции по величине измеренного отклонения малоразмерного объекта от центра окна анализа. По сглаженным координатам центра

определяют разности  Если одна из этих разностей изменяется скачком, то это свидетельствует о плохом качестве селекции. За показатель качества селекции принимается величина
Если одна из этих разностей изменяется скачком, то это свидетельствует о плохом качестве селекции. За показатель качества селекции принимается величина
При хорошем качестве селекции уточняют параметры объекта (размеры и знак контраста), и эту информацию используют при настройке структуры и параметров селекции объекта. Окончательно координаты объекта оценивают как центр тяжести выделенной области Мо
Третий вариант способа селекции наземных и воздушных объектов заключается в том, что изображение объекта получают в различных участках спектрального диапазона излучения (видимом, инфракрасном, радиолокационном и т.д. ), и обработку сигналов осуществляют параллельно в n идентичных каналах селекции описанными выше способами, после чего производят комплексирование координат объекта с учетом значимости каждого канала:
где 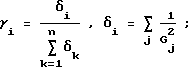
n - количество каналов селекции;
δi- характеристика значимости канала селекции;
Gj - показатель качества селекции j-го классификатора в i-м канале селекции.
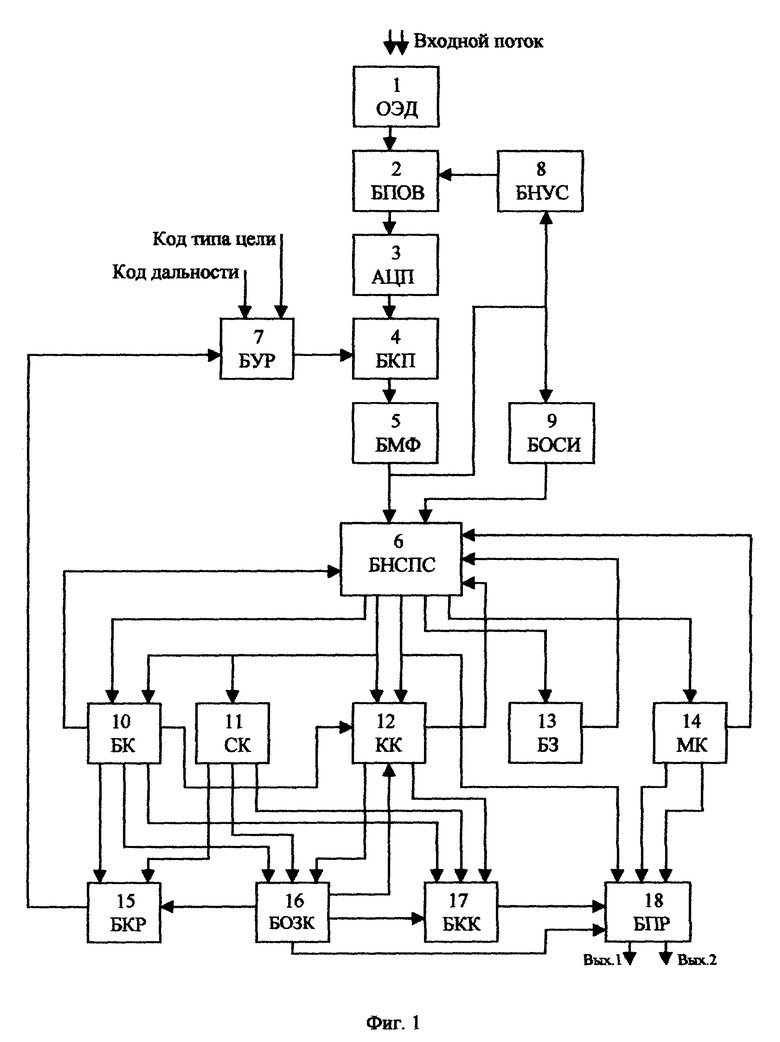
Устройство для селекции наземных и воздушных объектов (реализующее описанные выше первый и второй варианты способа селекции наземных и воздушных объектов) содержит (фиг. 1) последовательно включенные оптико-электронный датчик (ОЭД) 1, блок предварительной обработки видеосигнала (БПОВ) 2, аналого-цифровой преобразователь (АЦП) 3, блок кадровой памяти (БКП) 4, блок масштабирования и фильтрации (БМФ) 5, блок настройки структуры и параметров селектора (БНСПС) 6. Второй вход БКП 4 соединен с выходом блока управления рамкой (БУР) 7, выход БМФ 5 соединен также с входом блока настройки усиления и смещения (БНУС) 8 и входом блока оценки сепарабельности изображения (БОСИ) 9. Выход БНУС 8 подключен ко второму входу БПОВ 2, а выход БОСИ 9 - ко второму входу БНСПС 6. Его первый выход соединен с первым входом байесовского классификатора (БК) 10, второй выход - со вторым входом БК 10, входом структурного классификатора (СК) 11, первым входом корреляционного классификатора (КК) 12, третий выход - со вторым входом КК 12 и третьим входом блока принятия решения БПР 18, четвертый выход - с входом блока захвата (БЗ) 13, пятый выход - с входом морфологического классификатора (МК) 14. Первый выход байесовского классификатора БК 10 подключен к третьему входу блока настройки структуры и параметров селектора БНСПС 6, второй выход - к третьему входу корреляционного классификатора КК 12, третий выход - к первому входу блока комплексирования размеров (БКР) 15, четвертый выход - к первому входу блока оценки значимости классификации (БОЗК) 16, пятый выход - к первому входу блока комплексирования координат (БКК) 17. Первый выход структурного классификатора СК 11 подключен ко второму входу блока комплексирования размеров БКР 15, второй выход - ко второму входу блока оценки значимости классификации БОЗК 16, третий выход - ко второму входу блока комплексирования координат БКК 17. Первый выход корреляционного классификатора КК 12 подключен к третьему входу блока оценки значимости классификации БОЗК 16, второй выход - к третьему входу блока комплексирования координат БКК 17, третий выход - к четвертому входу блока настройки структуры и параметров селектора БНСПС 6. Выход блока комплексирования размеров БКР 15 подключен к первому входу блока управления рамкой БУР 7, через второй и третий входы которого вводится цифровая информация о типе объекта-цели и код дальности. Первый выход блока оценки значимости классификации БОЗК 16 подключен к первому входу блока принятия решения (БПР) 18, второй выход - к третьему входу блока комплексирования размеров БКР 15, третий выход - к четвертому входу корреляционного классификатора КК 12, четвертый выход - к четвертому входу блока комплексирования координат БКК 17, выход которого подключен ко второму входу блока принятия решения БПР 18, четвертый и пятый входы которого соединены соответственно с первым и вторым выходами морфологического классификатора МК 14. Третий выход последнего соединен с пятым входом БНСПС 6, к шестому входу которого подключен выход блока захвата БЗ 13. Первый и второй выходы блока принятия решения БПР 18 являются выходами устройства.
Байесовский классификатор (фиг. 2) содержит первый блок структурной предобработки (БСП-1) 24, блок записи структурного эталона (БЗСЭ) 27, последовательно включенные блок формирования гистограмм (БФГ) 19, блок локальной сегментации (БЛС) 20, блок формирования бинарного образа (БФБО) 21, первый блок оценки координат и размеров (БОКР-1) 22, блок свертки проекций (БСПр) 23, а также последовательно включенные первый блок оценки качества (БОК-1) 25, блок смены эталонных проекций (БСЭП) 26. Первый и второй входы блока формирования гистограмм БФГ 19 являются входами байесовского классификатора БК 10 (фиг. 1) и соединены соответственно с первым и вторым выходами блока настройки структуры и параметров селектора БНСПС 6. С первым входом БФГ 19 соединен вход первого блока структурной предобработки БСП-1 24, выход которого подключен ко второму входу блока записи структурного эталона БЗСЭ 27. К выходу блока формирования бинарного образа БФБО 21 также подключен вход первого блока оценки качества БОК-1 25, к выходу которого также подключен первый вход блока записи структурного эталона БЗСЭ 27. Выход блока смены эталонных проекций БСЭП 26 соединен со вторым входом блока свертки проекций БСПр 23. Выход первого блока оценки качества БОК-1 25 является также первым и четвертым выходами байесовского классификатора БК 10 (фиг. 1), которые соединены соответственно с третьим входом блока настройки структуры и параметров селектора БНСПС 6 и первым входом блока оценки значимости классификации (БОЗК) 16; выход блока записи структурного эталона БЗСЭ 27 является вторым выходом БК 10, который соединен с третьим входом корреляционного классификатора КК 12; выходы блока свертки проекций БСПр 23 являются третьим и пятым выходами БК 10, которые соединены соответственно с первым входом блока комплексирования размеров БКР 15 и первым входом блока комплексирования координат БКК 17.
Структурный классификатор (фиг. 3) содержит второй блок оценки координат и размеров (БОКР-2) 34, последовательно включенные блок дифференциальной предобработки (БДП) 28, блок сегментации (БС) 29, блок оценки структурных примитивов (БОСП) 30, блок оценки композиции примитивов (БОКП) 31, блок грамматического разбора (БГР) 32 и второй блок оценки качества (БОК-2) 33. К выходу блока грамматического разбора БГР 32 подключен также вход второго блока оценки координат и размеров БОКР-2 34. Вход блока дифференциальной предобработки БДП 28 является входом структурного классификатора СК 11 (фиг. 1). Выходы второго блока оценки координат и размеров БОКР-2 34 являются его первым и третьим выходами, которые соединены соответственно со вторым входом блока комплексирования размеров БКР 15 и вторым входом блока комплексирования координат БКК 17. Выход второго блока оценки качества БОК-2 33 является вторым выходом СК 11, который подключен ко второму входу блока оценки значимости классификации БОЗК 16.
Корреляционный классификатор (фиг. 4) содержит последовательно включенные второй блок структурной предобработки (БСП-2) 35, блок корреляционной привязки (БКПр) 36, первый блок оценки координат (БОКрд-1) 37, третий блок оценки качества (БОК-3) 38, блок смены эталона (БСЭ) 39. Выход последнего подключен ко второму входу блока корреляционной привязки БКПр 36. Входы второго блока структурной предобработки БСП-2 35 являются первым и вторым входами корреляционного классификатора КК 12 (фиг. 1), которые подключены соответственно ко второму и третьему выходам блока настройки структуры и параметров селектора БНСПС 6; второй и третий входы блока смены эталона БСЭ 39 являются третьим и четвертым входами корреляционного классификатора КК 12 и подключены соответственно ко второму выходу байесовского классификатора БК 10 и третьему выходу блока оценки значимости классификации БОЗК 16. Выходы третьего блока оценки качества БОК-3 38 являются первым и третьим выходами корреляционного классификатора КК 12, которые соединены соответственно с третьим входом блока оценки значимости классификации БОЗК 15 и с четвертым входом блока настройки структуры и параметров селектора БНСПС 6; выход первого блока оценки координат БОКрд-1 является вторым выходом КК 12, который подключен к третьему входу блока комплексирования координат БКК 17.
Блок захвата БЗ 13 (фиг. 5) содержит последовательно включенные блок кластерного анализа (БКА) 40, блок сегментации изображения (БСИ) 41 и блок формирования данных (БФД) 42. Вход блока кластерного анализа БКА 40 является входом блока захвата БЗ 13 (фиг. 1), который соединен с четвертым выходом блока настройки структуры и параметров селектора БНСПС 6. Выход блока формирования данных БФД 42 является выходом БЗ 13, который подключен к шестому входу БНСПС 6.
Морфологический классификатор (фиг. 6) содержит блок идентификации границ (БИГ) 48, второй блок оценки координат (БОКрд-2) 49, последовательно включенные блок структуризации множества яркостей (БСМЯ) 43, блок выделения пиков или долин (БВПД) 44, блок выделения цели (БВЦ) 45, четвертый блок оценки качества (БОК-4) 46, блок уточнения параметров цели (БУПЦ) 47. Вход блока структуризации множества яркостей БСМЯ 43 является входом морфологического классификатора МК 14 (фиг. 1), который соединен с пятым выходом блока настройки структуры и параметров селектора БНСПС 6, и с ним соединен вход блока идентификации границ БИТ 48, выход которого подключен ко второму входу блока выделения цели БВЦ 45. К выходу последнего также подключен вход второго блока оценки координат БОКрд-2 49, выход которого является вторым выходом МК 14, который подключен к пятому входу блока принятия решения БПР 18. Выход четвертого блока оценки качества БОК-4 46 является также первым выходом МК 14, который соединен с четвертым входом БПР 18, а выход блока уточнения параметров цели БУПЦ 47 является третьим выходом, который соединен с пятым входом БНСПС 6.
Второй вариант устройства для осуществления третьего варианта способа (фиг. 7) содержит n идентичных каналов селекции, каждый из которых состоит из описанных выше блоков без блока принятия решения БПР 18, который в данном варианте является общим для всех каналов, а также блок межканального комплексирования (БМКК) 50. При этом каналы отличаются тем, что в них использованы оптико-электронные датчики ОЭД 1, работающие в различных участках спектрального диапазона излучения. В качестве ОЭД 1 могут быть применены, например, телевизионная камера (ТВ), чувствительная в видимом спектральном диапазоне; низкоуровневая телекамера (НТВ), чувствительная к отраженному излучению подсветки, ближнего инфракрасного (ИК) диапазона; тепловизионная камера (ТПВ), чувствительная в среднем (3...5 мкм) или дальнем (8...12 мкм) ИК диапазонах; миллиметровый активно-пассивный радиолокатор и т.п. Первый выход блока оценки значимости классификации БОЗК 16, выход блока комплексирования координат БКК 17, второй и первый выходы морфологического классификатора МК 14 являются первым, вторым, третьим и четвертым выходами i-го канала (где i = 1.2.3. ..n), которые подключены к входам блока межканального комплексирования координат БМКК 50. Его выход соединен с первым входом блока принятия решения БПР 18, к (i+ 1)-му входу которого подключен третий выход блока настройки структуры и параметров селектора БНСПС 6, являющийся пятым выходом i-го канала, а первый и второй выходы блока принятия решения БПР 18 являются выходами устройства.
Все названные блоки устройства структурно построены по известным правилам и выполнены на известной элементной базе вычислительной техники (операционные усилители, компараторы, регистры, сигнальные процессоры, постоянные и оперативные запоминающие устройства, умножители, микросхемы комбинационной логики и т.п.) с соблюдением требований по быстродействию. Так, например, блок предварительной обработки видеосигнала БПОВ 2 реализован на 3-х операционных усилителях, 2-х восьмиразрядных регистрах и 2-х умножающих цифроаналоговых преобразователях. Блок кадровой памяти БКП 4 выполнен на микросхемах ОЗУ и 16-разрядных регистрах. Блок масштабирования и фильтрации БМФ 5 содержит 7 сдвигающих регистров, 9 цифровых компараторов и дешифратор. Блок настройки структуры и параметров селектора БНСПС 6 и блок захвата БЗ 13 выполнены на микропроцессорах типа TMS 320С20. Байесовский БК 10 и структурный СК 11 классификаторы реализованы на арифметико-логических устройствах, управляющих постоянными запоминающими устройствами, счетчиках и регистрах. Корреляционный КК12 и морфологический МК 14 классификаторы выполнены на 4-х 16- и 2-х 32-разрядных параллельных регистрах, 2-х блоках матричного умножения и сумматорах-накопителях. Блок комплексирования размеров БКР 15, блок оценки значимости классификации БОЗК 16, блок комплексирования координат БКК 17, блок принятия решения БПР 18 выполнены на микропроцессорах типа TMS 320С25.
Описанное устройство для селекции наземных и воздушных объектов (фиг. 1) работает следующим образом. Видеосигнал с выхода ОЭД 1 поступает в блок предварительной обработки видеосигнала БПОВ 2, где в каждом кадре производится настройка усиления и смещения (формулы 1-3), в результате которых оптимизируется использование динамического диапазона для селекции объекта. Настройка БПОВ 2 выполняется по командам из блока настройки усиления и смещения БНУС 8 (который выдает значения kн у и kн с согласно формулам 1, 2). Далее в АЦП 3 видеосигнал преобразуется в цифровой код с квантованием по уровням яркости в каждой точке, множество которых образует кадр цифрового изображения. По вводимой оператором информации о типе объекта, дальности до него или текущей информации о размерах изображения объекта в блоке управления рамкой БУР 7 формируется окно анализа. Сигналы с выхода АЦП 3 и БУР 7 поступают в блок кадровой памяти БКП 4, где окно анализа в каждом кадре позиционируется относительно прогнозируемого положения объекта, и информация в пределах этого окна хранится в течение длительности кадра. Эта информация поступает в блок масштабирования и фильтрации БМФ 5, где производится масштабирование и фильтрация шума изображения медианным фильтром с окном 3х3 элемента. С выхода БМФ 5 сигналы поступают через первый вход в блок настройки структуры и параметров селектора БНСПС 6 в БНУС 8 (для вычисления коэффициентов усиления и смещения) и в блок оценки сепарабельности входного изображения БОСИ 9. В этом блоке сигнал подвергается обработке по формулам 4-11 и сигнал, пропорциональный величине сепарабельности изображения, подается на второй вход БНСПС 6. Здесь по величине сепарабельности определяется параметр сглаживания рекурсивных фильтров и настраивается порог сегментации в байесовском классификаторе.
В зависимости от характера и параметров объекта блок настройки структуры и параметров селектора БНСПС 6 определяет режим работы и состояние устройства в целом. В режиме захвата размерной цели сигналы БНСПС 6 (первый выход) подаются только на первый вход байесовского классификатора БК 10. В режиме автосопровождения сигналы БНСПС 6 (второй выход) подаются параллельно на второй вход БК 10, вход структурного классификатора СК 11 и первый вход корреляционного классификатора КК 12. При нарушении режима автосопровождения (при плохом качестве селекции объекта) сигналы БНСПС 6 (третий выход) подаются параллельно на второй вход КК 12 и третий вход блока принятия решения БПР 18 (при этом БК 10 и СК 11 отключаются). В режиме селекции малоразмерного объекта сигналы БНСПС 6 (четвертый и пятый выходы) подаются только на входы соответственно блока захвата БЗ 13 и морфологического классификатора МК 14 (при этом БК 10, СК 11 и КК 12 отключены).
В режиме захвата размерного объекта БНСПС 6 подключает в работу только БК 10, который функционирует следующим образом (фиг. 2). Входное изображение с первого выхода БНСПС 6 поступает на вход первого блока структурной предварительной обработки БСП-1 24 и первый вход блока формирования гистограмм БФГ 19. В БСП-1 24 формируется структурный образ изображения для последующей корреляционной привязки, для чего входное изображение предварительно фильтруется, а затем преобразуется в соответствии с формулами 7-8, 12. Сигналы с выхода БСП-1 24 подаются на второй вход блока записи структурного эталона БЗСЭ 27 для запоминания. В БФГ 19 по входному изображению формируются гистограммы распределения яркостей (формулы 13, 14). С выхода этого блока сигналы подаются в блок локальной сегментации БЛС 20, где выполняется сегментация окна анализа независимо по отношению к каждому краевому окну (формула 15). Далее в БФБО 21 формируется бинарный образ объекта путем объединения и пересечения частных результатов классификации. Сигналы с выхода этого блока поступают в первый блок оценки качества БОК-1 25 и в первый блок оценки координат и размеров БОКР-1 22. В БОК-1 25 формируется показатель качества селекции по результатам сегментации окна анализа (формула 16). Сигналы, пропорциональные величине показателя качества селекции, с выхода БОК-1 25 подаются на первый вход блока записи структурного эталона БЗСЭ 27, на вход блока смены эталонных проекций БСЭП 26, а также (фиг. 1) на третий вход блока настройки структуры и параметров селектора БНСПС 6 и первый вход блока оценки значимости классификации БОЗК 16. В первом блоке оценки координат и размеров БОКР-1 22 по бинарному образу, поступающему из БФБО 21, определяются текущие проекции плоского изображения по горизонтали и вертикали (формулы 17-25). Сигналы, пропорциональные величинам этих проекций, подаются на первый вход блока свертки проекций БСПр 23, где координаты центра изображения объекта корректируются по результатам свертки текущих и эталонных проекций (формулы 26, 27). Эталонные проекции в процессе работы селектора обновляются. Разрешение на их обновление формируется по оценкам качества селекции. При хорошем качестве селекции в БСЭП 26 запоминаются эталонные проекции, а в БЗСЭ 27 запоминается структурный эталон объекта. В режиме захвата свертка проекций не выполняется. В режиме автосопровождения сигналы, пропорциональные значениям эталонных проекций, с выхода БСЭП 26 подаются на второй вход БСПр 23.
Переход от режима захвата к режиму автосопровождения размерного объекта выполняется при условии, что величина показателя качества селекции меньше порогового значения. При этом в работу включаются одновременно байесовский (БК 10), структурный (СК 11) и корреляционный (КК 12) классификаторы.
Полученные в результате описанной выше байесовской классификации коды размеров изображения объекта и коды координат объекта с первого и второго выходов блока свертки проекций БСПр 23 подаются на первые входы соответственно блока комплексирования размеров БКР 15 и блока комплексирования координат БКК 17. С выхода первого блока оценки качества БОК-1 25 на первый вход блока оценки значимости классификации БОЗК 16 подается сигнал, пропорциональный величине показателя качества селекции объекта байесовским классификатором БК 10.
В структурном классификаторе СК 11 входное изображение, поступающее со второго выхода БНСПС 6, последовательно подвергается дифференциальной предобработке (формула 28) в БДП 28, пороговой сегментации (формула 29) в БС 29. Затем бинарное изображение кодируется цепным кодом в блоке оценки структурных примитивов БОСП 30. По значениям кодов в качестве примитивов выделяются раздельно горизонтальные и вертикальные линии и точки их пересечения. В следующем блоке оценки композиции примитивов БОКП 31 формируется текущая композиция примитивов и определяются расстояния между линиями, расстояния между точками пересечений, положение линий и точек пересечений относительно центра окна анализа. В БГР 32 для данного типа объекта (код типа объекта вводится в блок управления рамкой БУР 7 оператором) выполняется грамматический разбор текущей композиции примитивов путем определения вида объекта и его составных частей через выделенные примитивы. В результате разбора определяется принадлежность текущей композиции примитивов искомому объекту или его частям. С выхода БГР 32 информация о композиции примитивов, выделенной как объект или его составная часть, поступает во второй блок оценки качества БОК-2 33 и во второй блок оценки координат и размеров БОКР-2 34. В БОК-2 33 лингвистические переменные, характеризующие степень принадлежности выделенного сочетания примитивов объекту, шкалируются в количественные характеристики результата селекции. Сигналы, пропорциональные этим характеристикам, с выхода БОК-2 33 подаются на второй вход блока оценки значимости классификации БОЗК 16. В БОКР-2 34 композиция примитивов проектируется на оси X и Y, по проекциям определяются координаты и размеры объекта с учетом взаимного положения его составных частей (аналогично работе блока БОКР-1 22 байесовского классификатора БК 10). Сигналы, пропорциональные размерам объекта, с первого выхода БОКР-2 34 поступают на второй вход блока комплексирования размеров БКР 15, а сигналы, пропорциональные координатам объекта, со второго выхода БОКР-2 34 поступают на второй вход блока комплексирования координат БКК 17.
В корреляционном классификаторе КК 12 (фиг. 4) селекция объекта выполняется в следующей последовательности. Исходное изображение, поступающее со второго выхода БНСПС 6 на первый вход второго блока структурной предварительной обработки БСП-2 35, подвергается структурной предварительной обработке, аналогичной той, что выполняется в БСП-1 24 байесовского классификатора в соответствии с формулами 7-8, 12, т.е. формируется структурный образ изображения. Информация о нем передается в блок корреляционной привязки БКП 36, в котором выполняется привязка эталона и структурного образа (формула 30). Далее в первом блоке оценки координат БОКрд-1 37 выполняется оценка координат точки корреляционной привязки. Корреляционная поверхность сечется на уровне Кmin + 0,1(Kmax - Kmin). Всем точкам поверхности выше этого уровня присваивается значение "1". В сечении выделяются связные области и определяется число точек в каждой из них. За точку привязки принимается центр области, расположенной ближе всех к центру окна анализа. Сигналы с выхода БОКрд-1 37 поступают на третий вход блока комплексирования координат 17 и вход третьего блока оценки качества БОК-3 38, в котором производится оценка качества корреляционной привязки (формула 31). Сигналы с выхода этого блока поступают на третий вход блока оценки значимости классификации БОЗК 16 и четвертый вход БНСПС 6. Перезаписью эталона в блоке смены эталона БСЭ 39 управляет блок оценки значимости классификации БОЗК 16, если качество селекции высокое (все классификаторы работают надежно). В свою очередь БСЭ 39 получает первый эталон от блока записи структурного эталона БЗСЭ 27 байесовского классификатора БК 10. В блоках БКР 15 и БКК 17 выполняется комплексирование соответственно размеров и координат объекта, полученных в результате работы всех трех классификаторов (формулы 32-35), а в блоке БОЗК 16 оценивается значимость (информативность) классификации по частным оценкам "правильности" классификации каждого классификатора. Сигналы, пропорциональные величине значимости классификации, с третьего выхода БОЗК 16 подаются на четвертый вход КК 12 (третий вход БСЭ 39) для управления сменой эталона.
Информация о значимости классификации с первого выхода блока оценки значимости классификации БОЗК 16 и информация о координатах объекта с выхода блока комплексирования координат БКК 17 подается соответственно на первый и второй входы блока принятия решения БПР 18, с первого выхода которого выдаются текущие координаты объекта (при устойчивой селекции объекта), а со второго выхода - прогнозируемые координаты объекта (при отсутствии селекции объекта). При нарушении режима автосопровождения информация об исходном изображении с третьего выхода блока настройки структуры и параметров селектора БНСПС 6 параллельно поступает на третий вход БПР 18 и второй вход корреляционного классификатора КК 12 (второй вход второго блока структурной предобработки БСП-2 35). В этом случае производится корреляционная привязка объекта в расширенном поле анализа с выдачей прогнозируемых координат объекта. Байесовский БК 10 и структурный СК 11 классификаторы в этом режиме отключаются (в БНСПС 6 подключен только один из 5 выходов в зависимости от режима работы).
Для селекции малоразмерных объектов, минимальный габаритный размер изображения которых меньше 5 пикс (второй вариант способа), используется селектор малоразмерных объектов, содержащий блок захвата БЗ 13 и морфологический классификатор МК 14. Блоки 10-12, 15-17 устройства (фиг. 1) в этом режиме отключены. Селектор малоразмерных объектов работает следующим образом.
В режиме захвата входное изображение с четвертого выхода блока настройки структуры и параметров селектора БНСПС 6 поступает на вход блока кластерного анализа БКА 40 (фиг. 5) блока захвата БЗ 13 (фиг. 1). Здесь входное изображение кластеризуется на области, примерно однородные по яркости, с выделением центров кластеризации, относительно которых строится кластер-карта изображения, у которой яркости точек замещаются номерами кластеров. В следующем блоке сегментации изображения БСИ 41 выполняется сегментация изображения в окне анализа, в результате чего для каждого кластера нумеруются связные области путем построчного просмотра кластер-карты и отображения ее в карту номеров четырехсвязных областей. Затем в блоке формирования данных БФД 42 формируются исходные данные (определяются размеры и контрастная яркость объекта согласно формулам 36, 37) для морфологической классификации. Информация об этих данных с выхода БЗ 13 поступает на пятый вход БНСПС 6, после чего выполняется переход на автосопровождение, и с пятого выхода БНСПС 6 она вместе с входным изображением в режиме слежения подается параллельно на вход блока идентификации границ БИГ 48 и на вход блока структуризации множества яркостей БСМЯ 43 морфорлогического классификатора МК 14 (фиг. 6), который работает следующим образом.
В БИГ 48 определяется наличие границ фона в окне анализа. В БСМЯ 43 по размеру и форме изображения объекта формируется структурирующий элемент множества яркостей. В зависимости от знака контрастной яркости изображения объекта исходное множество яркостей в окне анализа либо замыкается посредством структурирующего элемента, либо размыкается. Наращение и эрозия многоуровневого множества яркостей на изображении выполняются последовательно сначала по строкам изображения, а затем по столбцам (формулы 38-41). В результате наращения все темные пятна затираются, а само изображение становится более светлым. Эрозия затирает светлые пятна на изображении, если их размер меньше, чем размер структурирующих множеств. Эрозия наращения замыкает многоуровневое множество яркостей, устраняя все малоразмерные темные пятна в пределах окна анализа, а наращение эрозии размыкает это множество, подавляя локальные светлые пятна и перешейки между ними. Локальные светлые пятна на изображении образуют пики многоуровневого множества яркостей, темные пятна - его долины, которые выделяются (формулы 42-45) в следующем блоке выделения пиков или долин БВПД 45. Затем в блоке выделения цели БВЦ 45 с учетом информации о границах фона в окне анализа, поступающей на второй вход этого блока с выхода БИГ 48, изображения в окне анализа бинаризуются (формула 46), в результате чего все малоразмерные фрагменты с яркостью ниже пороговой устраняются, а среди оставшихся нумеруются все связные образования. Размеры пронумерованных областей отождествляются с размерами описанных прямоугольников, а координаты центров - с положением центра тяжести каждой из них. Если связных областей несколько, то за селектируемый объект принимается область, ближайшая к центру окна анализа, и для нее определяется знак контрастной яркости. В очередном кадре будут выделяться либо пики на многоуровневом множестве яркостей, если объект ярче фона, либо долины, если объект темнее фона. Сигналы с выхода БВЦ 45 поступают на вход четвертого блока оценки качества БОК-4 46 и вход второго блока оценки координат БОКрд-2 49. В БОК-4 46 оценивается качество селекции по величине измеренного отклонения центра малоразмерного объекта от центра окна анализа (формулы 47-49). Сигналы с выхода БОК-4 46 подаются на четвертый вход блока принятия решения БПР 18 и на вход блока уточнения параметров объекта БУПЦ 47, в котором при хорошем качестве селекции уточняются размеры и знак контраста изображения объекта. Информация о них с выхода БУПЦ 47 подается на шестой вход БНСПС 6. В БОКрд-2 49 оцениваются координаты объекта как центр тяжести выделенной области по формулам 50, 51 и сигналы, пропорциональные их значениям, подаются на пятый вход БПР 18. При устойчивой селекции с его первого выхода выдаются текущие координаты объекта, а при отсутствии селекции со второго выхода выдаются прогнозируемые координаты.
Второй вариант устройства для селекции наземных и воздушных объектов (фиг. 7), реализующего третий вариант способа, работает следующим образом. Каждый i-й из n каналов селекции работает так, как описано выше. Сигналы, пропорциональные величинам оценок значимости классификации, с первых выходов БОЗК 16; сигналы, пропорциональные значениям комплексированных координат размерного объекта, с выходов БКК 17; сигналы, пропорциональные величинам оценок качества селекции и значениям координат малоразмерного объекта, со второго и третьего выходов МК 14 каждого канала селекции подаются в БМКК 50, в котором выполняется комплексирование координат объекта согласно формулам 52, 53. Сигналы, пропорциональные значениям этих координат, с выхода БМКК 50, а также информация об отсутствии селекции с третьего выхода БНСПС 6 поступают в блок принятия решения БПР 18. При устойчивой селекции объекта с его первого выхода выдаются сигналы, пропорциональные текущим координатам объекта, а при отсутствии селекции со второго выхода выдаются прогнозируемые координаты объекта.
Приведенные сведения показывают, что при осуществлении заявленной группы изобретений выполняются следующие условия: средства, реализующие изобретения, предназначены для использования в промышленности, а именно в системах распознавания и селекции объектов различного назначения; для заявленных изобретений в том виде, как они охарактеризованы в формуле изобретения, подтверждена возможность их осуществления с помощью описанных выше или других известных до даты подачи заявки средств и методов; средства, воплощающие изобретения при их осуществлении, способны обеспечить получение указанного технического результата. Следовательно, заявленные изобретения каждое в отдельности и группа в целом соответствуют условию патентоспособности "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ПРИЦЕЛИВАНИЯ И ВЫСТРЕЛА ИЗ СТРЕЛКОВОГО ОРУЖИЯ (ЕГО ВАРИАНТЫ) | 2002 |
|
RU2240485C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИИ ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ НА ОСНОВЕ КОМПЛЕКСИРОВАНИЯ БАЗОВЫХ АЛГОРИТМОВ | 2014 |
|
RU2575401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СКОРОСТНЫХ ЛЕТЯЩИХ ЦЕЛЕЙ И ГОЛОВКА САМОНАВЕДЕНИЯ, ЕГО РЕАЛИЗУЮЩАЯ | 2015 |
|
RU2603235C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 1997 |
|
RU2123166C1 |
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ (ЕГО ВАРИАНТЫ) | 1993 |
|
RU2088967C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРИБОР | 2000 |
|
RU2166167C1 |
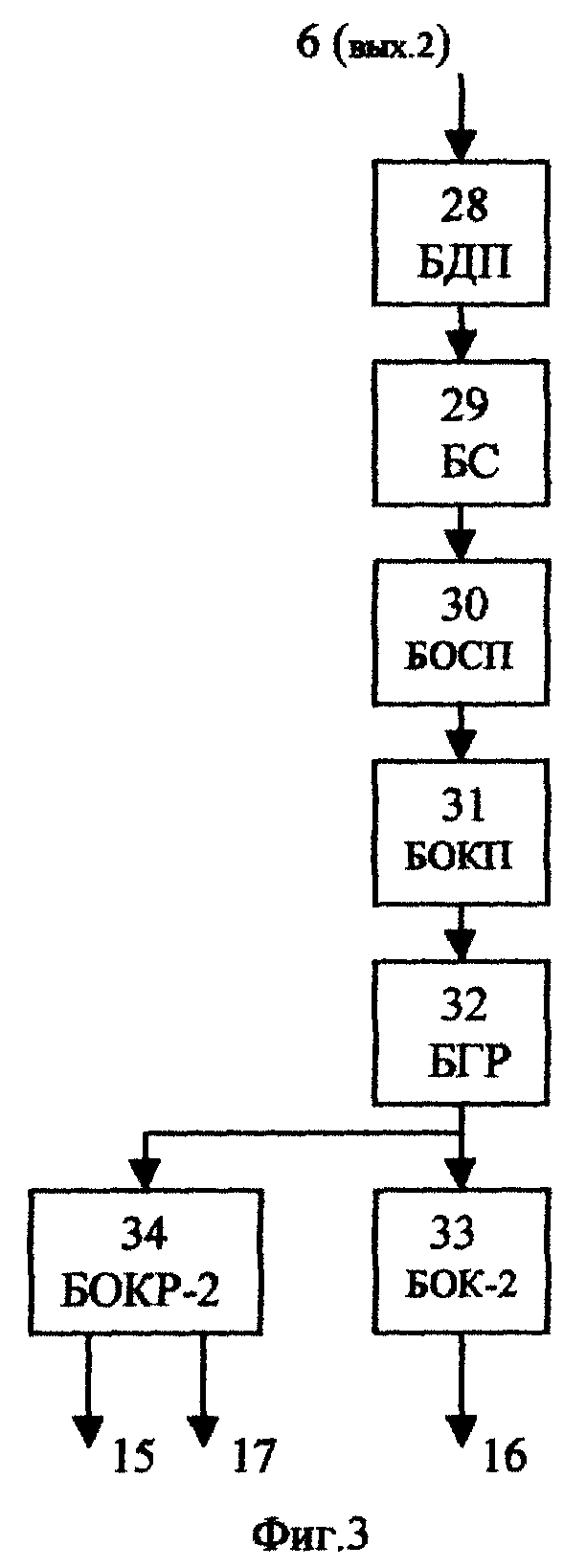
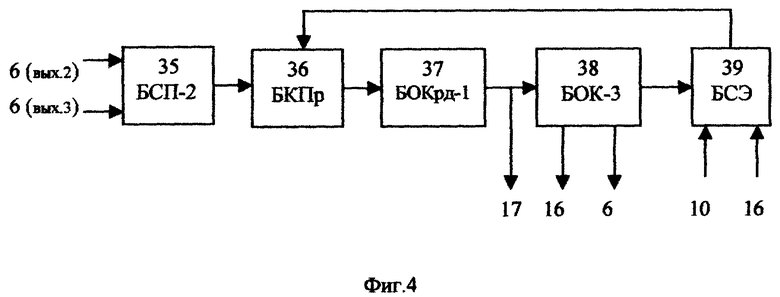
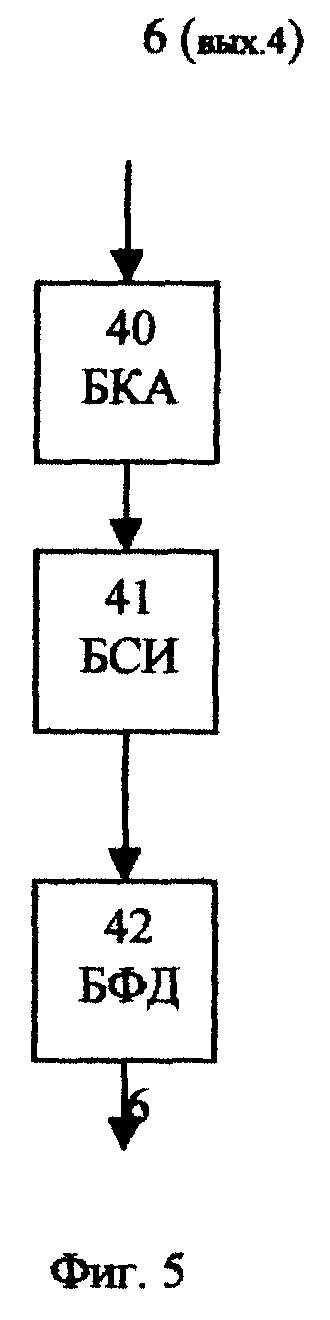
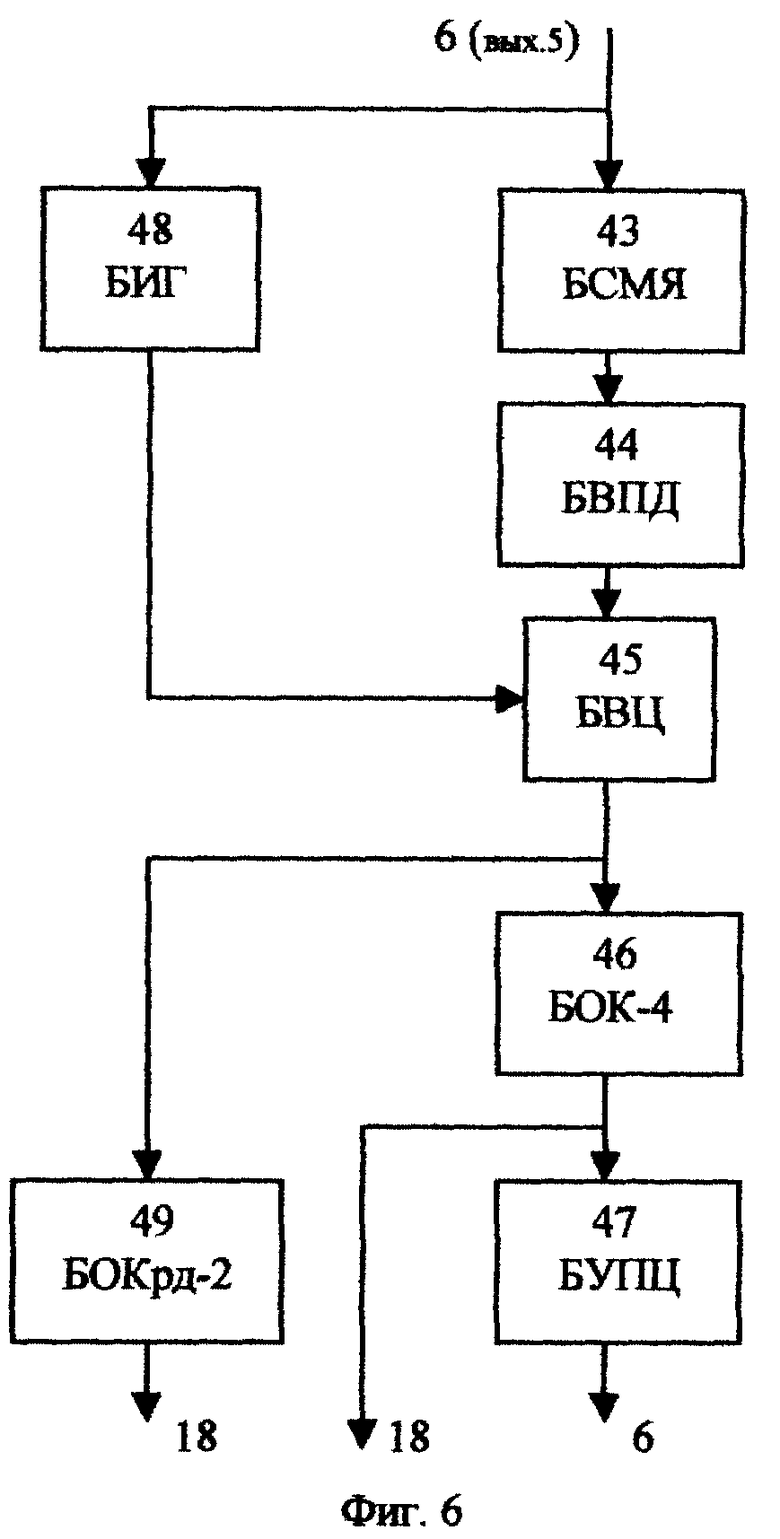
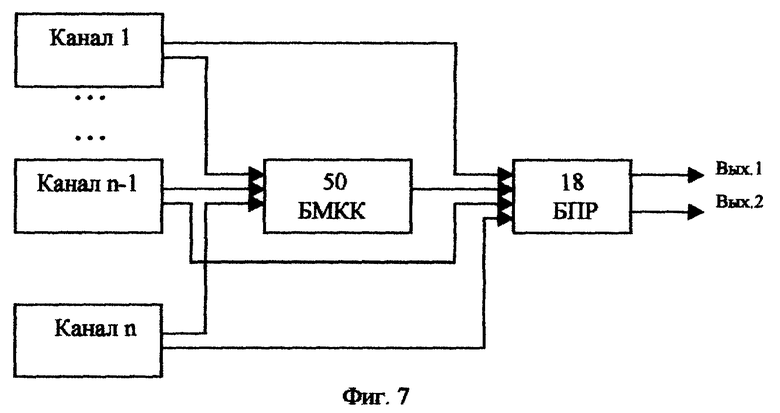
Способ селекции наземных и воздушных объектов включает формирование видеоизображения участка земной поверхности, его дискретизацию по пространственным координатам, настройку усиления и смещения видеосигнала, его преобразование в цифровую форму, запоминание цифрового изображения, формирование рамки с окном анализа, масштабирование и фильтрацию запомненного цифрового изображения в пределах рамки, оценку сепарабельности изображения, настройку структуры и параметров селектора объекта (цели), байесовскую и структурную классификации изображения, формирование структурного текущего образа и эталона цели, их корреляционную классификацию (привязку), оценку значимости каждого способа классификации и их совокупности, комплексирование размеров и координат цели с учетом значимости способа классификации, определение текущих или прогнозируемых координат цели и использование их в автономном режиме для селекции и сопровождения размерной цели. Для селекции и сопровождения малоразмерной цели во втором варианте способа вместо байесовской, структурной и корреляционной классификаций изображения производится кластерный анализ, сегментация и морфологическая классификация изображения. В третьем варианте способа осуществляется одновременно аналогичная обработка изображений, полученных в различных спектральных диапазонах излучения. Первый и второй варианты способа реализованы в устройстве, содержащем оптико-электронный датчик, блоки предварительной обработки видеосигнала и обработки цифрового изображения, селектор размерных целей (байесовский, структурный и корреляционный классификаторы) и селектор малоразмерных целей (морфологический классификатор), блоки оценки значимости классификации, комплексирования координат и размеров цели, блоки принятия решения. Благодаря перестраиваемой структуре устройство обеспечивает захват и автосопровождение как размерных, так и малоразмерных целей. Второй вариант устройства содержит n идентичных каналов, аналогичных вышеописанному, но работающих от различных спектрозональных оптико-электронных датчиков. Результаты селекции в каналах комплексируются в блоке межканального комплексирования координат с учетом значимости каждого канала селекции. Достигаемым техническим результатом является повышение точности и надежности селекции наземных и воздушных объектов. 5 с. и 10 з.п. ф-лы, 7 ил.