Предлагаемое изобретение относится к метрологии, автоматике и технической кибернетике и может быть использовано при разработке систем автоматического анализа и классификации изображений.
Известен способ формирования признаков для распознавания изображений однородных структур, заключающийся в построчном сканировании изображений объектов или структур, формировании сигналов пересечения сканирующим лучом контура объекта и последующем анализе получаемых при этом видеоимпульсов, соответствующих хордам сканируемых объектов /1/.
Данный способ обладает низкой надежностью распознавания, т.к. может успешно применяться только для распознавания и анализа структур, которые образованы элементами с четко выраженными границами, формирование признаков полутоновых изображений данным способом невозможно.
Данный способ можно реализовать с помощью устройства для распознавания образов, содержащего первый блок памяти, соединенный через блок коммутации, подключенный к регистру сдвига, с первым блоком счетчиков, второй блок памяти, соединенный через регистр сдвига с блоком управления, блок классификации спектров распознаваемых образов, соединенный с первым блоком счетчиков и блоком управления, второй блок счетчиков, подключенный к первому блоку памяти и к блоку управления, и третий блок счетчиков, соединенный со вторым блоком памяти и управления /2/.
Недостатками такого устройства являются его конструктивная сложность, возможность работы только с черно-белыми изображениями.
Наиболее близким к предлагаемому по технической сущности является способ выделения признаков для распознавания объектов, заключающийся в разбиении проекции изображения объектов на дискретные элементы путем многократного одновременного проецирования не менее двух растров, дискретным деформированием изображений растров, выделении и подсчете в качестве дискретных элементов изображений зон пересечения растров /3/.
Однако данным способом невозможно выделить изображения объектов при знакопеременном контрасте, который наиболее часто встречается в естественных структурах.
Данный способ можно реализовать с помощью устройства для предварительной обработки подлежащего распознаванию изображения, содержащего фотоэлектрический преобразователь для сканирования исходного изображения, формирования сигналов по второму выходу и последовательных во времени электрических видеосигналов по первому выходу, с которым соединены последовательно соединенные схема для дискретизации видеосигналов, логическая схема по первому входу и набор счетчиков; со вторым выходом фотоэлектрического преобразователя соединены вход схемы для формирования позиционных сигналов, определяющих положение каждого двоичного видеосигнала на плоскости изображения, и вход памяти, использующей позиционные сигналы в качестве адресных, выход которой соединен со вторым входом логической схемы, а выход схемы для формирования позиционных сигналов соединен с одним из входов набора счетчиков /4/.
Недостатком данного устройства является ограниченное число реализуемых операций для обработки изображений.
Задачей предлагаемого изобретения является повышение надежности выделения многоцветного изображения объекта со знакопеременным контрастом без предварительного улучшения качества изображения (фильтрации сигналов) в условиях сложного фона за счет выделения в поле обзора объекта определенных габаритов, у которого цветовая (полутоновая) гамма изображения отличается от цветовой (полутоновой) гаммы окружающего фона.
Поставленная задача достигается тем, что в предлагаемом изобретении в способе, заключающемся в преобразовании оптических сигналов в электрические видеосигналы, дискретизации видеосигналов, разбиении изображения объектов на дискретные элементы, сканировании изображения, выделении и подсчете дискретных элементов, сканирование по всем дискретным элементам изображения производят электронным окном в виде рамки фона, внутри которой в центре находится электронное окно изображения объекта (ОИО), причем размеры ОИО соизмеримы с размерами изображения объекта, при выделении и подсчете в качестве дискретных элементов изображения объекта принимаются дискретные элементы ОИО с такими значениями электрических сигналов, которые отсутствуют среди сигналов дискретных элементов рамки фона;
в устройство для предварительной обработки подлежащего распознаванию изображения, содержащее фотоэлектрический преобразователь, формирователь позиционных сигналов, схему дискретизации видеосигналов, память, логическую схему "И", счетчик, причем выход памяти соединен с первым входом логической схемы "И", выход которой соединен со вторым входом счетчика, дополнительно введены временное устройство, первый коммутатор, второй формирователь позиционных сигналов, второй коммутатор, третий коммутатор, причем выход второго формирователя позиционных сигналов соединен со вторым входом второго коммутатора, первый вход которого соединен с выходом первого формирователя позиционных сигналов, третий вход - с первым выходом временного устройства и входом первого коммутатора, а выход соединен со вторым входом третьего коммутатора, первый вход которого соединен с выходом фотоэлектрического преобразователя матричного типа, выход третьего коммутатора соединен со входом схемы дискретизации видеосигналов, выход которой соединен со вторым входом памяти, первый вход которой соединен с выходом первого коммутатора, третий вход - со вторым выходом временного устройства, четвертый вход - с третьим выходом временного устройства и первым входом счетчика, четвертый выход временного устройства соединен со вторым входом логической схемы "И", выход счетчика является выходом устройства.
Положительный эффект обеспечивается за счет выделения и подсчета дискретных элементов участка матрицы фотоэлектрического преобразователя, соизмеримого с размерами искомого объекта, со значениями электрических сигналов, которые отсутствуют среди сигналов дискретных элементов рамки фона, окружающей изображение объекта, причем не требуется предварительное улучшение качества изображения (фильтрация сигналов фотоэлектрического преобразователя), т. к. в результате произведенных операций из сюжета исключается (стирается) изображение фона с любым шумом.
Предлагаемый способ заключается в следующем.
Фотоэлектрический преобразователь матричного типа принимает оптические сигналы с поля зрения, содержащего искомый объект, осуществляет преобразование оптических сигналов в электрические видеосигналы и разбиение изображения сюжета на дискретные элементы. Производят дискретизацию видеосигналов и последовательный просмотр сигналов с элементов матрицы фотоэлектрического преобразователя электронным окном в виде рамки фона, внутри которой в центре находится электронное окно изображения объекта, причем размеры окна изображения объекта соизмеримы с размерами изображения объекта. Из дискретных элементов окна изображения объекта исключают элементы со значениями сигналов, которые присутствуют среди сигналов с дискретных элементов рамки фона. Этой операцией выделяют изображение объекта, имеющего знакопеременный контраст относительно окружающего фона и размеры, соответствующие размерам искомого объекта. В качестве признака изображения объекта, например площади, подсчитывают оставшиеся после исключения дискретные элементы участка объекта.
Данное техническое решение поясняется графическими материалами.
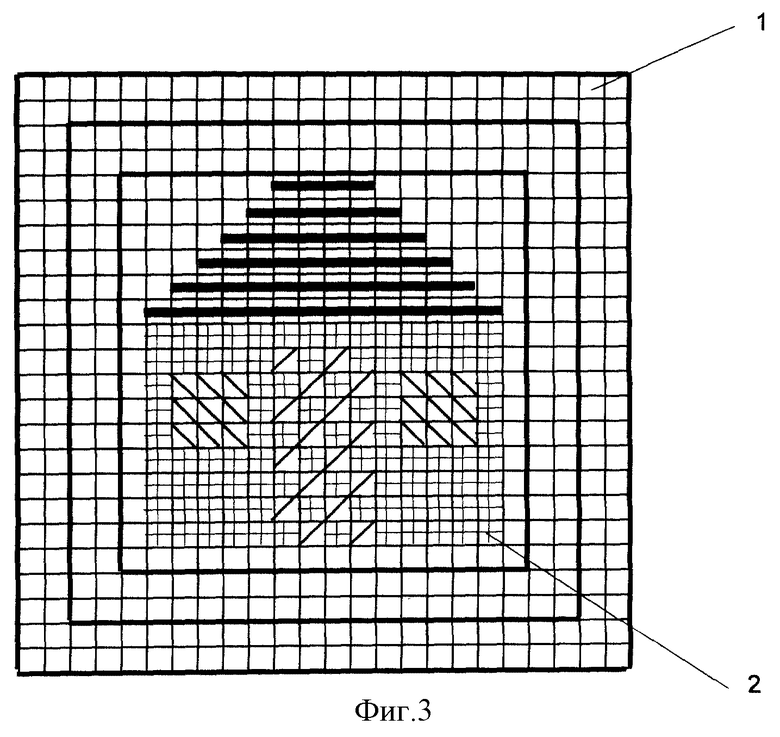
На фиг. 1 изображено расположение областей электронного окна на фрагменте изображения сюжета, сформированного фотоэлектрическим преобразователем, где 1 - участок фона (рамка фона), 2 - окно изображения объекта (ОИО). На данном фрагменте, содержащем изображения искомого объекта и фона, для распознавания необходимо выделить изображение объекта. Определяют значения сигналов рамки фона. Рамка фона содержит сигналы с амплитудами, условно представленными на фиг. 2. Исключают (стирают) из изображения ОИО элементы матрицы фотоэлектрического преобразователя с данными значениями сигналов. В результате в ОИО остается изображение искомого объекта (фиг. 3).
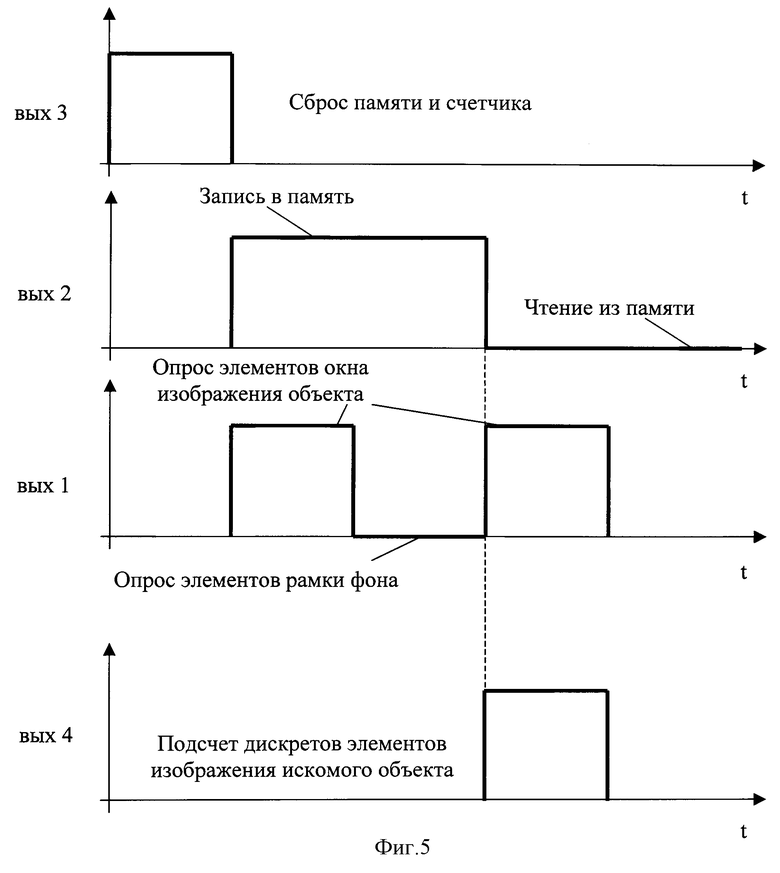
На фиг. 4 изображена блок-схема устройства, с помощью которого можно реализовать предлагаемый способ, на фиг. 5 - циклограмма работы временного устройства.
Предлагаемое устройство работает следующим образом. При подаче питания сигнал с первого выхода временного устройства поступает на вход 3 коммутатора 2 (4) и устанавливает его в положение, когда на второй вход коммутатора 3 (6) через второй вход и выход коммутатора 2 поступают адреса ОИО, определенные во втором формирователе позиционных сигналов ОИО (2) в соответствии с законом сканирования, а коммутатор 1 (3) устанавливается в состояние "1", при котором с его выхода на первый вход памяти поступает сигнал "1".
На втором выходе блока 9 формируется сигнал записи памяти, поступающий на третий вход памяти (8), разрешающий запись информации. На третьем выходе временного устройства (9) возникает импульс, устанавливающий устройство в начальное состояние: сброс (запись "0" во все элементы) по четвертому входу памяти и счетчика по входу 1. Сигнал "0" с четвертого выхода блока 9 поступает на второй вход логической схемы (10), являющейся схемой "И", и блокирует работу счетчика (11).
На матрицу фотоэлектрического преобразователя проецируется анализируемое изображение. По адресам, поступающим из блока 2 через коммутатор 2 на второй вход коммутатора 3, блок 6 подключает элементы матрицы фотоэлектрического преобразователя, принадлежащие ОИО, к схеме дискретизации видеосигналов (7), в котором осуществляется преобразование аналогового сигнала с фотоэлектрического преобразователя в цифровой код. В блоке 8 происходит запись уровня "1", действующего на входе 1 с выхода коммутатора 1, по адресам, поступающим в память с выхода схемы дискретизации видеосигналов. В результате опроса элементов ОИО в памяти по адресам, равным амплитудам сигналов с элементов матрицы фотоэлектрического преобразователя, соответствующих ОИО, записаны "1", т. е. через значения адресов памяти определены значения амплитуд сигналов ОИО.
По окончании опроса элементов ОИО на первом выходе временного устройства появляется импульс опроса элементов рамки фона, который поступает на третий вход блока 4 и переключает состояние коммутатора 2 в режим соединения первого формирователя позиционных сигналов рамки фона (1) со вторым входом коммутатора 3, а коммутатор 1 в состояние "0".
Теперь по адресам, поступающим на второй вход блока 6 из блока 1, коммутатор 3 подключает к схеме дискретизации видеосигналов элементы матрицы фотоэлектрического преобразователя, принадлежащие рамке фона. После схемы дискретизации видеосигналов на втором входе памяти появляются значения адресов рамки фона, по которым действующий на первом входе уровень "0" записывается в память. При этом меняется состояние только тех ячеек памяти, в которые на предыдущем этапе (опросе элементов ОИО) была записана "1", т.е. из памяти стирается информация по адресам, выраженным амплитудами сигналов, одинаковыми для ОИО и рамки фона.
По окончании опроса элементов рамки фона в память записана "1" только по тем адресам, значения которых равны значению амплитуд сигналов с элементов ОИО и отсутствуют среди амплитуд с элементов рамки фона.
Одновременно на третьем входе памяти появляется сигнал чтения со второго выхода временного устройства, на четвертом выходе временного устройства формируется сигнал "1", поступающий на второй вход блока 10 и разрешающий счетчику счет единичных импульсов, приходящих на его второй вход. Импульс первого выхода временного устройства переключает коммутатор 2 в исходное состояние, когда на второй вход коммутатора 3 поступают адреса ОИО. Если на втором входе памяти возникает импульс с амплитудой, равной адресу ячейки памяти, в которой хранится "1", с выхода памяти положительный импульс поступает на первый вход логической схемы "И", и с выхода блока 10 на второй вход блока 11, где производится подсчет единичных импульсов.
Счетчик может быть выполнен, например, на микросхеме К155ИЕ2, логическая схема "И" - К155ЛА1, коммутаторы - К176КТ1, память - К155РУ5, схема дискретизации - аналогово-цифровой преобразователь К1107 ПВ1, фотоэлектрический преобразователь может быть выполнен, например, на ПЗС матрице /5/, временное устройство - как таймер 555 /6/, а формирователь позиционных сигналов - аналогично прототипу /4/.
Таким образом, использование предлагаемых способа и устройства позволяет выделять изображение объекта с размерами, соответствующими размерам искомого объекта, имеющего контраст относительно близлежащего окружающего фона.
Предлагаемые способ и устройство повышают надежность распознавания объекта, обеспечивают без фильтрации сигналов возможность распознавания полутоновых объектов при знакопеременном контрасте на сложном фоне в условиях помех.
Заявляемые способ выделения признаков для распознавания изображений объектов и устройство для его осуществления проверены с большой эффективностью в комплексе "Гермес".
Источники информации
1. А.с. СССР N 748454, кл. G 06 К 9/00, 1980 - аналог.
2. А.с. СССР N 650087, кл. G 06 К 9/00, 1970 - аналог.
3. А.с. СССР N 987643, кл. G 06 К 9/30, 7.01.83 - прототип.
4. A. з. Япония N 64-6508, кл. G 06 F 15/64, 15/66, G 06 К 9/20, 9/36 - прототип.
5. Л.И.Хромов, Н.В.Лебедев, А.К.Цыцулин, А.Н.Куликов. Твердотельное телевидение. М.: Радио и связь, 1986.
6. М.Тули. Справочное пособие по цифровой электронике/ М.: Энергоиздат, 1990, стр. 36-40.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ПРИ РАСПОЗНАВАНИИ ОБЪЕКТОВ | 2001 |
|
RU2209466C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2219564C2 |
| СПОСОБ ВЫДЕЛЕНИЯ ВЕКТОРА ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616575C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБЗОРА И СОПРОВОЖДЕНИЯ | 2003 |
|
RU2237979C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2000 |
|
RU2197070C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2169378C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2197003C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| ПАССИВНАЯ ИНФРАКРАСНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2001 |
|
RU2197709C2 |
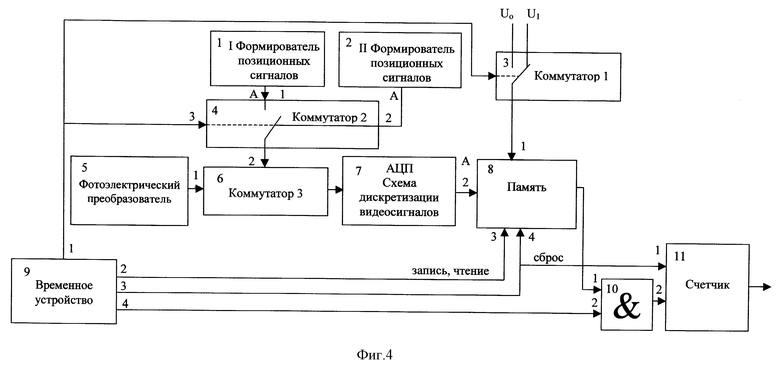
Изобретение относится к распознаванию изображений. Его использование позволяет обеспечить технический результат в виде повышения надежности выделения многоцветного изображения объекта без предварительной фильтрации. Способ заключается в преобразовании оптических сигналов в электрические видеосигналы, дискретизации видеосигналов, разбиении изображения объектов на дискретные элементы, сканировании изображения, выделении и подсчете дискретных элементов. Технический результат достигается благодаря тому, что сканирование по всем дискретным элементам изображения производят электронным окном в виде рамки фона, внутри которой в центре находится электронное окно изображения объекта, причем размеры окна изображения объекта соизмеримы с размерами изображения объекта, при выделении и подсчете в качестве дискретных элементов изображения объекта принимаются дискретные элементы окна изображения объекта с такими значениями электрических сигналов, которые отсутствуют среди сигналов дискретных элементов рамки фона. Устройство для осуществления способа содержит формирователи 1 и 2 позиционных сигналов, коммутаторы 3, 4 и 6, фотоэлектрический преобразователь 5 матричного типа, схему 7 дискретизации видеосигналов, память 8, временное устройство 9, логическую схему 10 И и счетчик 11. 2 с.п. ф-лы, 5 ил.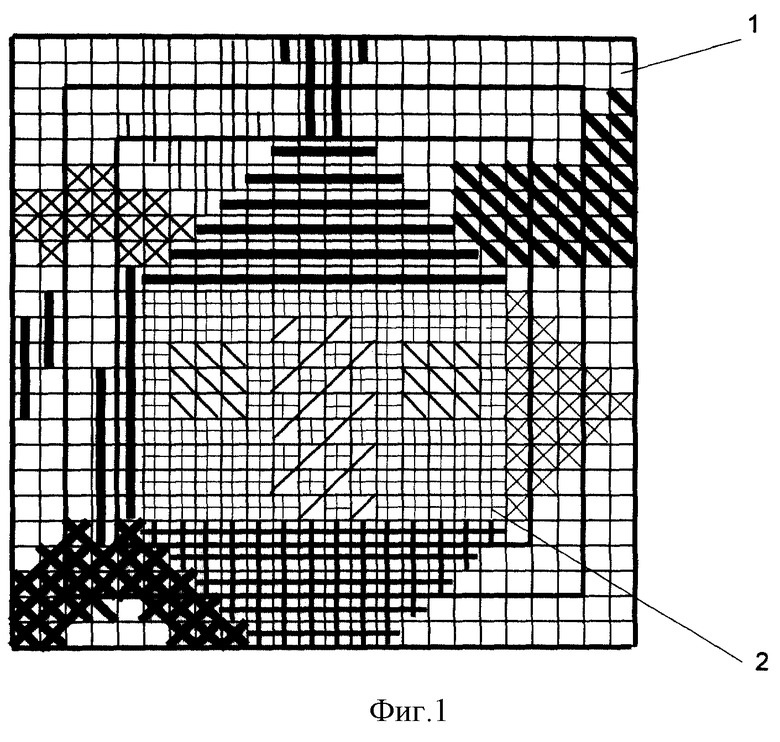
| Устройство для определения положения объекта на изображении | 1988 |
|
SU1569853A2 |
| Устройство для селекции изображений точечных объектов | 1989 |
|
SU1737470A1 |
| Способ выделения признаков для распознавания объектов | 1980 |
|
SU987643A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| US 4481666 A, 06.11.1984 | |||
| US 5133020 A, 21.07.1992 | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

