Изобретение относится к области подводной техники и, в частности, к технике для выполнения различных подводно-технических работ (поисковых, водолазных, спасательных).
В настоящее время в России и в других странах имеется большое количество типов эксплуатируемых и находящихся в разработке неавтономных (получающих энергоснабжение и управляемых по кабелю с судна-носителя) подводно-технических комплексов, в том числе:
- Необитаемые подводные телеуправляемые аппараты, имеющие движительно-рулевой комплекс, телевизионную, гидроакустическую и навигационную аппаратуру, системы, манипуляторные и другие устройства. Эти аппараты, называемые необитаемыми подводными аппаратами (НПА) или ROV, предназначены для выполнения поисковых и обследовательских работ, а также для выполнения различных подводно-технических работ с помощью манипуляторов без применения водолазного труда.
- Обитаемые самоходные водолазные колоколы, предназначенные для доставки водолазов на грунт, обеспечения выполнения работ водолазами на грунте, с подачей с колокола водолазам по шлангам газовых дыхательных смесей, горячей воды для обогрева водолазов и т.д. и обеспечения возвращения водолазов в декомпрессионный комплекс судна-носителя. Эти водолазные колоколы оснащены движительными комплексами, что обеспечивает возможность работы водолазам не только непосредственно под судном-носителем, но и в определенной зоне, удаленной от него.
- Спасательные самоходные колоколы, предназначенные для спасения экипажей затонувших подводных лодок "сухим" и "мокрым" способами. Эти колоколы оборудуются движительными комплексами, стыковочными шахтами для обеспечения стыковки с комингс-площадками аварийных ПЛ, приема подводников в колокол "сухим" способом и доставки их на судно-носитель.
- Обитаемые самоходные наблюдательные камеры, оснащенные движительными комплексами, средствами визуального наблюдения (иллюминаторы, подводные перископы, телевизионные камеры), предназначенные для поиска и обследования подводных объектов.
При выполнении конкретных подводно-технических работ на одном и том же подводном объекте иногда требуется использовать несколько типов привязных самоходных технических средств, что увеличивает стоимость выполнения операций.
Целью данного изобретения является создание конструкции многофункционального привязного (получающего электроэнергию с судна-носителя) комплекса для выполнения различных подводно-технических работ (МКПТР) (водолазных, спасательных, поисково-обследовательских и т.д.).
Указанная цель достигается тем, что конструкция погружаемого модуля МКПТР состоит из нескольких разъемных блоков, первый из которых является самоходной погружной платформой типа ROV, а другие - функциональными блоками, устанавливаемыми на платформу. При этом тип функционального блока, устанавливаемого на платформу, зависит от вида предстоящих подводно-технических работ (водолазных, спасательных, поисково-обследовательских и т.д.).
Наиболее близким аналогом данного изобретения можно считать конструкцию привязного самоходного водолазного колокола фирмы Bruker Meerestehnik, ФРГ (см. реферативные сборники "Судостроение. Военно-морская техника", 1985, 2, стр.115, 116; 9, стр.103; 12, стр.126, 127).
Недостатком этого колокола следует считать невозможность замены в погружаемом модуле водолазного колокола на другой функциональный блок (спасательный, поисково-обследовательский и т.д.), что снижает возможности колокола и требует при необходимости выполнения спасательных и поисково-обследовательских работ использования других аппаратов, что в свою очередь увеличивает стоимость проведения комплексных подводно-технических работ.
На фиг. 1 показана схема первого блока погружаемого модуля МКПТР. Блок состоит из платформы 1 с установленными на ней движителями продольного и поперечного перемещений 2 и вертикального перемещения 3, дифферентными цистернами 4, уравнительными цистернами 5, манипуляторами 6, телевизионными камерами 7, подводными светильниками 8, антеннами навигационной и гидроакустической аппаратуры 9, кабелем для приема электроэнергии 10, преобразователями электроэнергии 11, герметичными электроразъемами 12, штоком для крепления грузового троса 13. Этот блок может использоваться самостоятельно, так как представляет собой необитаемый подводный аппарат (НПА) типа ROV.
При установке и закреплении на первом блоке погружаемого модуля функциональных блоков (водолазного колокола, водолазно-спасательного колокола, наблюдательной камеры и т.д.) и подсоединения энергосистем функциональных блоков посредством герметичных электроразъемов 12 к энергосистеме платформы МКПТР может использоваться (соответственно) для выполнения водолазных и спасательных работ по эвакуации личного состава аварийной ПЛ "мокрым" способом (при установке водолазного колокола), или спасательных работ по эвакуации личного состава аварийной ПЛ "сухим" и "мокрым" способами (при установке водолазно-спасательного колокола), или поисково-обследовательских работ (при установке наблюдательной камеры).
На фиг. 2 представлена схема погружаемого модуля МКПТР, где в качестве второго блока погружаемого модуля установлен водолазно-спасательный колокол 14, имеющий прочный корпус 15 для размещения водолазов и спасенных подводников, люк 16 с крышкой для входа (выхода) водолазов, приема спасенных подводников и стыковки с декомпрессионными камерами судна-носителя для проведения декомпрессии водолазов и спасенных подводников (если они находились под давлением в аварийной ПЛ), съемной стыковочной шахты ("камеры присоса") 17 для стыковки колокола с комингс-площадками аварийных ПЛ, баллонами с запасами сжатого газа 18 для водолазов, герморазъемов 19 для приема электропитания в колокол и ограждения 20, предназначенного для крепления оборудования снаружи корпуса и защиты его от механических повреждений.
МКПТР в такой комплектации может, кроме работ, возлагаемых на ROV (гидроакустический и телевизионный поиск, обследование подводных объектов и выполнение подводных работ с помощью манипуляторов), выполнять водолазные и спасательные ("сухим" и "мокрым" способами) работы. При этом эксплуатационные характеристики МКПТР и гидрометеорологические условия, при которых он может эксплуатироваться (состояние моря, скорость подводных течений), будут не хуже, чем у аналогичных технических средств, имеющих погружаемый модуль "неразъемной" конструкции.
Однако при снятии с МКПТР функционального модуля и использования его в режиме ROV, имеющем значительно меньшее водоизмещение, его эксплуатационные характеристики и гидрометеорологические условия, при которых он может использоваться, будут значительно выше аналогов.
Возможны и другие комплектации второго блока погружаемого модуля МКПТР. Так стыковочная шахта ("камера присоса") 17 выполнена съемной и при ее съеме работы по спасению экипажей затонувших ПЛ "сухим" способом с помощью МКПТР производиться не могут. При замене водолазно-спасательного колокола на наблюдательную камеру (на чертежах не показано), представляющую собой прочную капсулу с верхним входным люком и установленными зрительными устройствами (иллюминаторы, зрительные трубы, подводные наблюдательные перископы) МКПТР будет предназначен для производства поисковых и обследовательских работ, а также выполнения подводно-технических работ с помощью манипуляторов.
В целом МКПТР способен выполнять все функции, присущие вышеперечисленным неавтономным подводно-техническим средствам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАСАТЕЛЬНАЯ ПОДВОДНАЯ ЛОДКА | 2022 |
|
RU2789096C1 |
| Самоходный телеуправляемый спасательный колокол | 2017 |
|
RU2679381C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| БЫСТРОХОДНОЕ СПАСАТЕЛЬНОЕ СУДНО | 2023 |
|
RU2798921C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
| Устройство для осуществления глубоководного контроля за подводной средой и подводно-техническими работами | 2019 |
|
RU2728888C1 |
| Способ эвакуации экипажа аварийной подводной лодки из всплывшей спасательной камеры и устройство для его осуществления | 2020 |
|
RU2756949C1 |
| Мобильная спасательная система | 2017 |
|
RU2679382C1 |
| СПОСОБ СПАСАНИЯ ПОДВОДНИКОВ ИЗ ОТСЕКОВ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2022 |
|
RU2797933C1 |
| МНОГОЦЕЛЕВАЯ ПОДВОДНАЯ СТАНЦИЯ (МПС) | 2010 |
|
RU2436705C1 |

Изобретение относится к области подводной техники, в частности к технике для выполнения различных подводно-технических работ. Многофункциональный комплекс для выполнения подводно-технических работ включает в себя самоходную платформу, постоянно используемую в работе, и съемные функциональные блоки, например водолазный колокол, водолазно-спасательный колокол, наблюдательная камера. Тип устанавливаемого функционального блока зависит от вида предстоящих подводно-технических работ. Достигается возможность производства различных подводно-технических работ с использованием единой самоходной платформы, что снижает время производства работ и их стоимость. 2 з.п. ф-лы, 2 ил.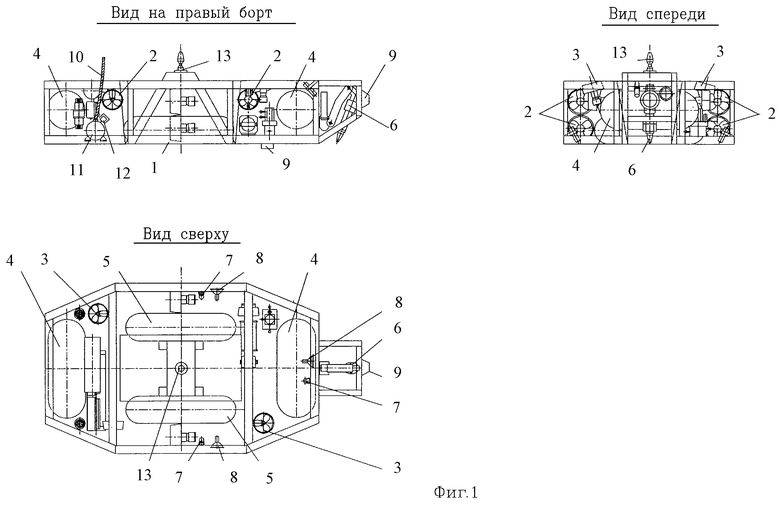
| Реферативный сборник "Судостроение | |||
| Военно-морская техника", 1985, №2, с.115, 116 | |||
| SU 336205 А, 27.11.1999 | |||
| US 4185580 А, 29.01.1980 | |||
| GB 1345683 A, 30.01.1974. |

