Текст описания в факсимильном виде (см. графическую часть)в
| название |
год |
авторы |
номер документа |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС |
2003 |
- Акулов А.И.
- Дудко Л.А.
- Козлов В.В.
- Коновченко А.А.
- Мезенцев А.П.
|
RU2239159C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС |
2003 |
- Акулов А.И.
- Дудко Л.А.
- Козлов В.В.
- Коновченко А.А.
- Мезенцев А.П.
|
RU2241957C1 |
| ГИРОКОМПАС |
2013 |
- Горбачев Александр Евгеньевич
- Громов Владимир Вячеславович
- Егоров Виктор Юрьевич
- Мосалёв Сергей Михайлович
- Рыбкин Игорь Семенович
- Хитров Владимир Анатольевич
|
RU2526477C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ |
2015 |
- Короп Василий Яковлевич
- Лебедев Владимир Вячеславович
- Орленко Владимир Васильевич
- Хорхорин Владимир Валерьевич
- Леонов Николай Александрович
- Уточкин Максим Николаевич
- Жуков Павел Евгеньевич
- Панков Алексей Владиславович
|
RU2610389C1 |
| ГИРОКОМПАС |
2015 |
- Цветков Виктор Иванович
- Рютин Сергей Алексеевич
- Ленский Юрий Владимирович
- Межирицкий Ефим Леонидович
- Червяков Юрий Иванович
- Паркачев Сергей Дмитриевич
- Царьков Валерий Петрович
|
RU2611575C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ |
2017 |
- Межирицкий Ефим Леонидович
- Ленский Юрий Владимирович
- Цветков Виктор Иванович
- Царьков Валерий Петрович
- Червяков Юрий Иванович
- Паркачев Сергей Дмитриевич
- Введенский Максим Дмитриевич
- Хомич Евгений Андреевич
|
RU2650425C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ |
2017 |
- Межирицкий Ефим Леонидович
- Ленский Юрий Владимирович
- Цветков Виктор Иванович
- Царьков Валерий Петрович
- Червяков Юрий Иванович
- Паркачев Сергей Дмитриевич
- Введенский Максим Дмитриевич
- Хомич Евгений Андреевич
- Мерецков Илья Владимирович
|
RU2656263C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН |
2005 |
- Белов Евгений Федорович
- Белов Максим Евгеньевич
- Носиков Максим Владимирович
- Саган Илья Анатольевич
|
RU2282717C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ДАТЧИКА УГЛОВОЙ СКОРОСТИ |
2023 |
- Вовченко Наталья Геннадьевна
- Соколов Сергей Викторович
- Чуб Елена Григорьевна
- Тищенко Евгений Николаевич
- Макаренко Елена Николаевна
|
RU2823435C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ |
2008 |
- Белов Евгений Федорович
- Белов Максим Евгеньевич
|
RU2387828C1 |
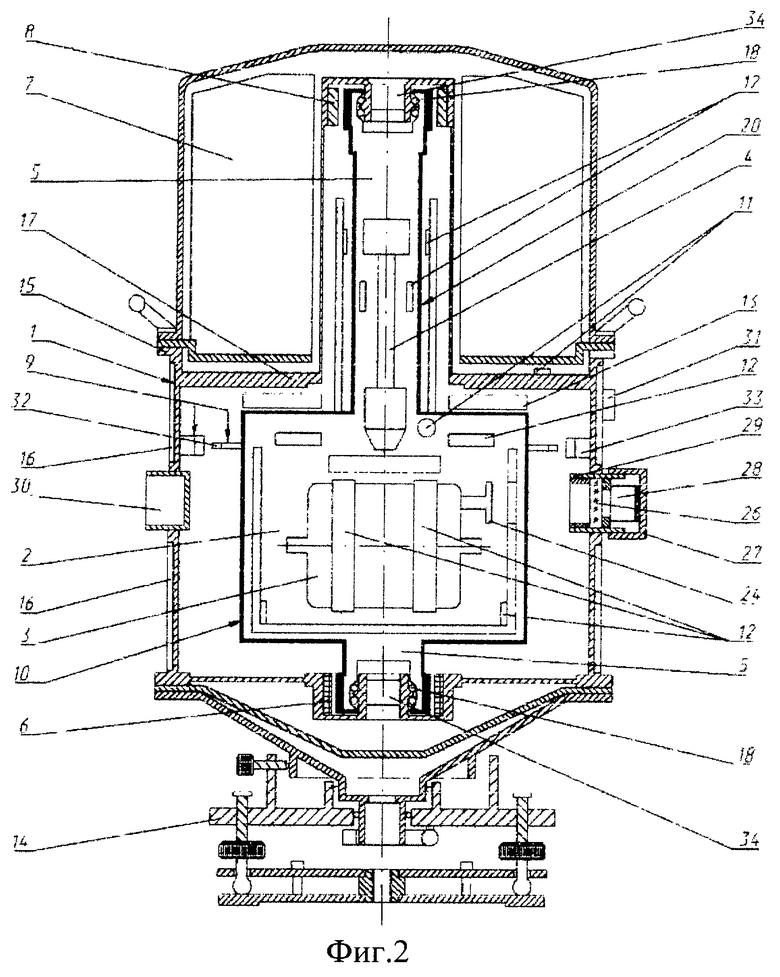
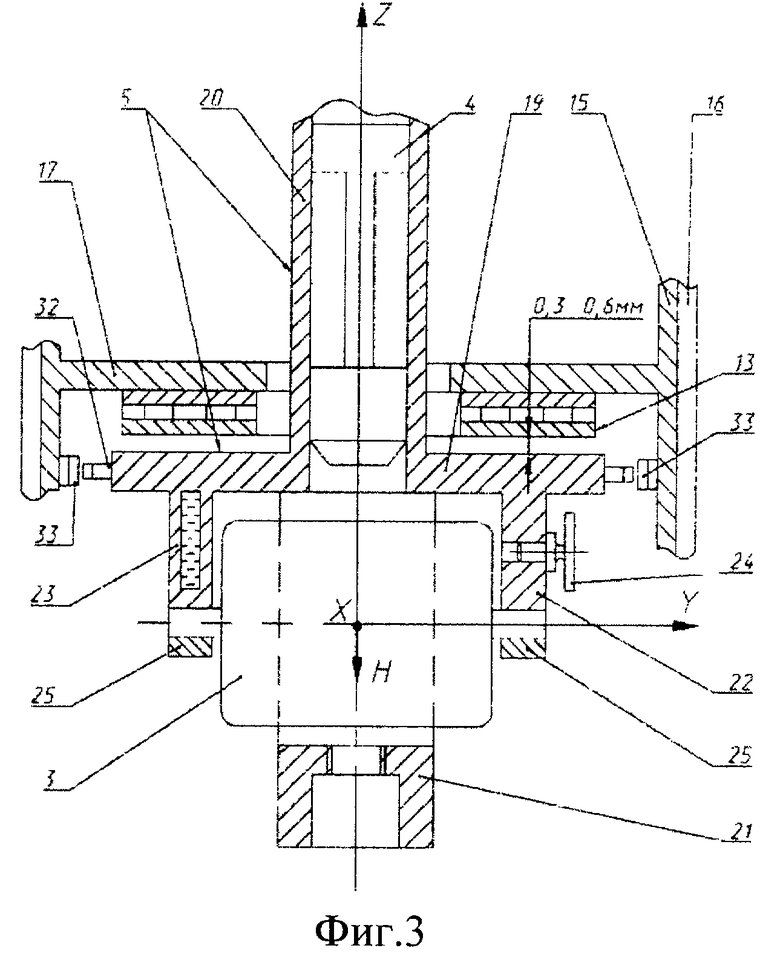
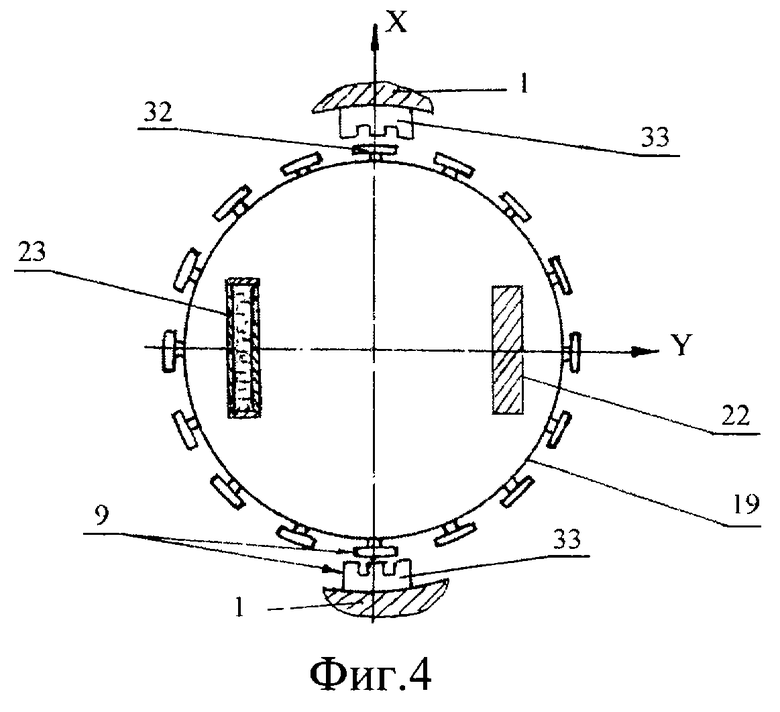
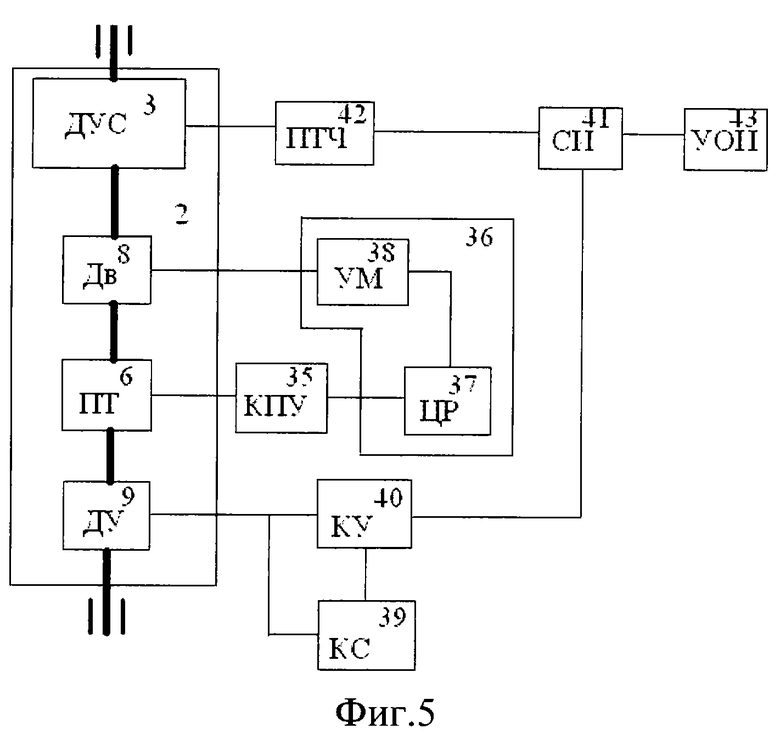
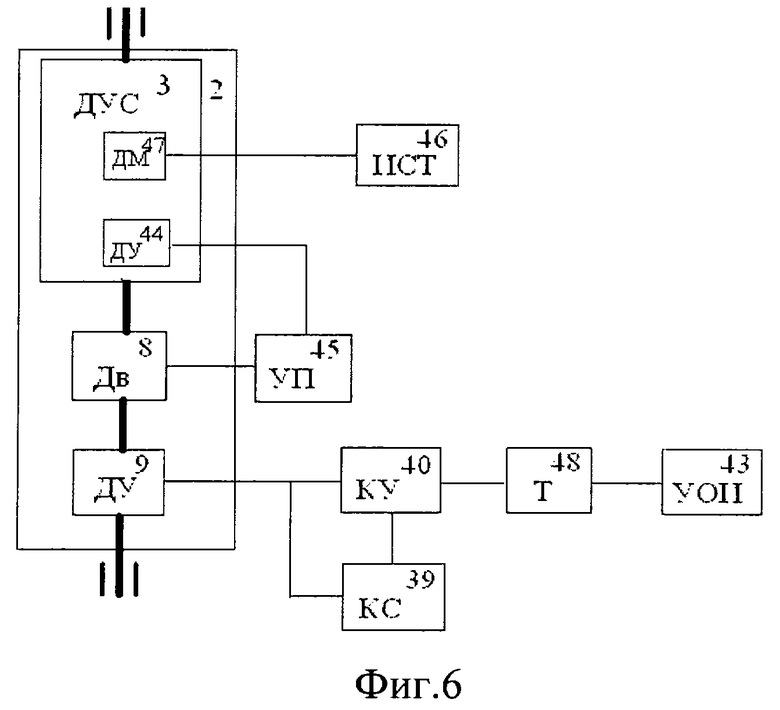
Использование: навигация, геодезия, измерение азимута на земной поверхности, прицеливание объектов различного назначения. Сущность изобретения: корпус гирокомпаса с размещенными в нем блоком чувствительных элементов (БЧЭ) в составе датчика угловой скорости и датчиков горизонта, системой разворота БЧЭ вокруг вертикальной оси, включающей задатчик разворота и привод, блоком сервисной электроники и вычислительным устройством, размещен на наклонно-поворотном столе. На корпусе расположены индикаторы негоризонтальности БЧЭ, электрически связанные через блок сервисной электроники с выходами датчиков горизонта. В систему разворота дополнительно введен многополосный датчик угла с паспортизуемыми значениями углов между полюсами датчика. 3 с. и 3 з.п.ф-лы, 6 ил.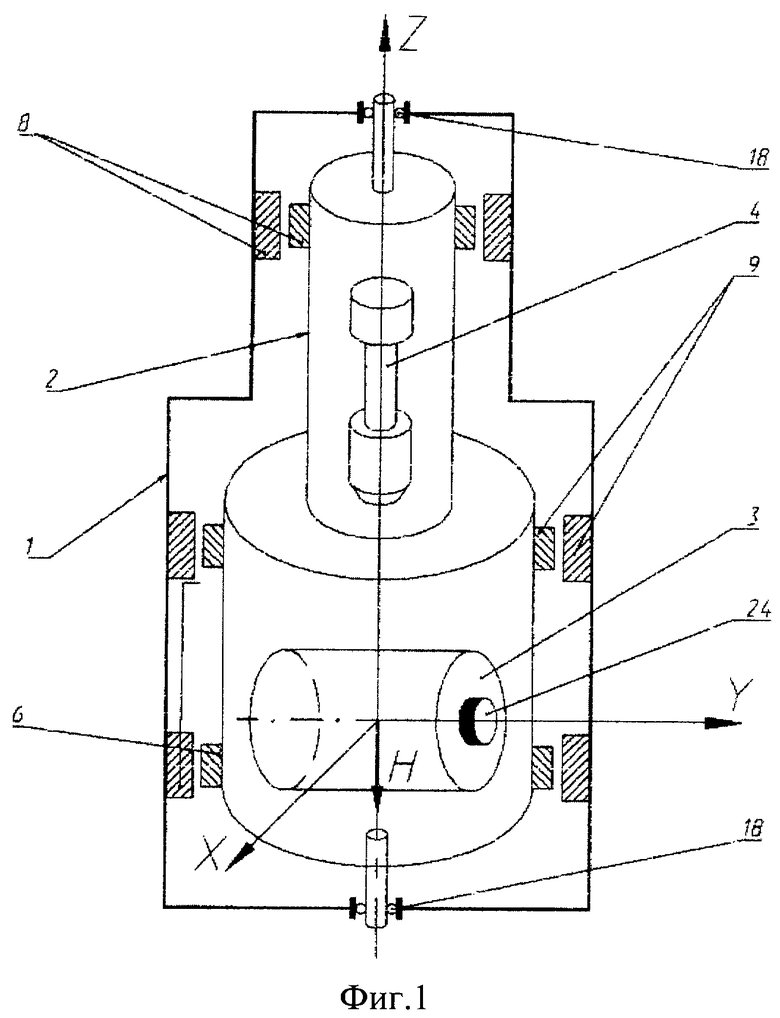
1. Автоматический гирокомпас, содержащий корпус, установленный на наклонно-поворотном столе, размещенный в корпусе блок чувствительных элементов (БЧЭ), имеющий в своем составе датчик угловой скорости и датчики горизонта, систему разворота БЧЭ вокруг вертикальной оси, включающую задатчик разворота и привод, блок сервисной электроники и вычислительное устройство, отличающийся тем, что на корпусе расположены индикаторы негоризонтальности БЧЭ, электрически связанные через блок сервисной электроники с выходами датчиков горизонта, при этом датчик горизонта, ось чувствительности которого совпадает с осью чувствительности датчика угловой скорости, дополнительно соединен через дифференцирующее устройство, введенное в блок сервисной электроники, с вычислительным устройством.2. Устройство по п.1, отличающееся тем, что в систему разворота БЧЭ дополнительно введен многополюсный датчик угла с паспортизуемыми значениями углов между полюсами датчика, при этом многополюсный датчик угла является индукционным с двумя диаметрально расположенными статорами на корпусе и с 2n(n≥2) роторами, равномерно и попарно диаметрально расположенными по окружности БЧЭ, а датчик угловой скорости имеет возможность установки на БЧЭ осью чувствительности соосно оси вращения БЧЭ для измерения углов между полюсами датчика угла при паспортизации.3. Способ определения углов между полюсами многополюсного датчика угла в составе автоматического гирокомпаса, включающий последовательные развороты блока чувствительных элементов (БЧЭ) в “нули” полюсов датчика угла и определение углов разворота, отличающийся тем, что предварительно устанавливают датчик угловой скорости (ДУС), входящий в состав БЧЭ, осью чувствительности соосно оси разворотов БЧЭ, затем вращают БЧЭ с угловой скоростью из диапазона измерения ДУСа, измеряют угловую скорость в течение m(m≥1) оборотов, одновременно фиксируют моменты времени прохождения “нулей” полюсов датчика угла, и интегрируют угловую скорость на временных интервалах между “нулями”, после чего вычисляют углы между полюсами датчика угла.4. Способ по п.3, отличающийся тем, что по завершении m полных оборотов реверсируют вращение БЧЭ и повторяют операции измерения угловой скорости, фиксации “нулей” полюсов и интегрирования угловой скорости, после чего вычисляют углы между полюсами датчика угла.5. Способ определения углов между полюсами многополюсного датчика угла в составе автоматического гирокомпаса, включающий последовательные развороты блока чувствительных элементов (БЧЭ) в “нули” полюсов датчика угла и определение углов разворота, отличающийся тем, что предварительно устанавливают датчик угловой скорости, входящий в состав БЧЭ, осью чувствительности соосно оси разворотов БЧЭ, затем включают по оси разворотов режим гироскопической стабилизации, используя в качестве чувствительного элемента системы стабилизации ДУС, подачей фиксированного тока в датчик момента ДУСа задают прецессионное движение БЧЭ с постоянной угловой скоростью, фиксируют моменты времени прохождения “нулей” полюсов датчика угла в течение m(m≥1) оборотов, определяют интервалы времени между “нулями” полюсов и длительность полных оборотов, после чего вычисляют углы между “нулями” полюсов датчика угла.6. Способ по п.5, отличающийся тем, что по завершении m полных оборотов реверсируют вращение БЧЭ посредством изменения полярности подаваемого в датчик момента тока, повторяют операции по определению интервалов времени между “нулями” полюсов и длительности полных оборотов, после чего вычисляют углы между “нулями” полюсов датчика угла.