Изобретение относится к области точного приборостроения, а именно к гироскопическим измерителям (инклинометрам) параметров траекторий нефтяных, газовых, геотермальных, железорудных и других скважин. Предназначено для использования в навигационных системах комплексов наклонно-горизонтального бурения.
В настоящее время для решения практических задач определения пространственной ориентации скважин различного назначения к инклинометру предъявляются жесткие требования по массогабаритным показателям (особенно по наружному диаметру - (38…42 мм), по минимизации электропотребления, по условиям работы при высоких окружающих температурах 100…150°С, при большом окружающем давлении 60 МПа.
Известны устройства [1, 2, 3, 4] гироскопического типа, гироскопы в которых, как правило, работают в режимах датчиков угловых скоростей (ДУС), измеряющих составляющие проекции угловой скорости вращения Земли. Акселерометры измеряют проекции ускорения силы тяжести. Результаты измерений обрабатываются, после чего определяется зенитный угол и азимутальное направление ствола скважины.
Недостатками известных устройств и способов, в них реализуемых, является недостаточная точность и ограниченные условия использования.
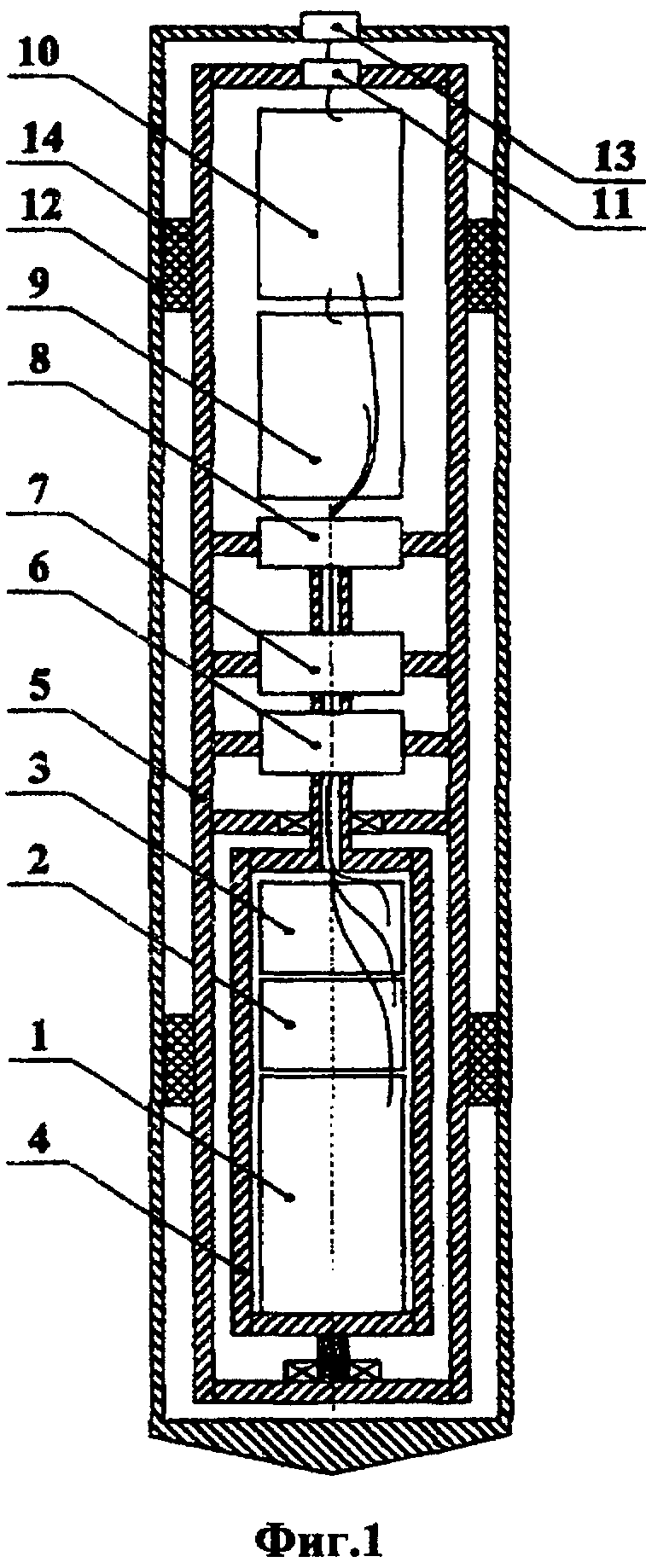
Известен гироскопический инклинометр Фиг.1, содержащий гироскопический измеритель угловой скорости и акселерометр, размещенные на поворотной платформе, установленной в корпусе с возможностью неограниченного вращения относительно его продольной оси, привод и датчик углового положения поворотной платформы, а также блок сервисных электронных устройств и блок обработки информации. Гироскопическим измерителем угловой скорости в данном приборе является волоконно-оптический гироскоп, на поворотной платформе дополнительно размещен двухкомпонентный датчик горизонта, а в блоке обработки информации реализован алгоритм определения параметров идеальных синусоид, максимально приближенных к измеренным значениям сигналов с акселерометра и волоконно-оптического гироскопа.
Известные способы, реализуемые в устройствах [3, 5], включают измерение в нескольких ориентациях проекций угловой скорости вращения Земли и проекций ускорения силы тяжести на оси, связанные с корпусом инклинометра, а вычисление азимута и зенитного угла скважины производится по фазам и амплитудам сигналов с гироскопов и акселерометров с выделением систематического дрейфа чувствительных элементов.
Целью предлагаемого изобретения является дальнейшее развитие способа, осуществляемого малогабаритным гироскопическим инклинометром, в части повышения точности и расширения условий использования.
Поставленная цель достигается тем, что в известном способе определения угловой ориентации скважин гироскопическим инклинометром, включающем измерение в нескольких ориентациях проекций угловой скорости вращения Земли и проекций ускорения силы тяжести на оси, связанные с корпусом инклинометра, и вычисление азимута и зенитного угла скважины с учетом выделенного дрейфа гироскопа, в котором в качестве измерителя угловой скорости используют гироскопический чувствительный элемент, при измерениях совершают поворот платформы на 360 угл.град., измерения проводят в ориентациях  (рад), где i - номер текущей ориентации, N - число ориентации, по полученным измерениям определяют нулевые отклонения, вычисляя средние значения измеренных сигналов, корректируют измеренные значения на величины нулевых отклонений и, используя метод последовательных приближений, определяют амплитуды и начальные фазы идеальных синусоид, максимально приближенных к скорректированным величинам сигналов, а вычисление азимута и зенитного угла скважины производят по полученным амплитудам и начальным фазам идеальных синусоид, дополнительно, перед эксплуатацией, проводят эталонирование инклинометра с определением амплитудных и фазовых искажений выходных характеристик прибора, по которым, исходя из требуемой точности, формируют «допустимые» области использования фазового метода, а в эксплуатации в «допустимых» областях азимут вычисляют, используя фазовый метод, а в «недопустимых» - амплитудный.
(рад), где i - номер текущей ориентации, N - число ориентации, по полученным измерениям определяют нулевые отклонения, вычисляя средние значения измеренных сигналов, корректируют измеренные значения на величины нулевых отклонений и, используя метод последовательных приближений, определяют амплитуды и начальные фазы идеальных синусоид, максимально приближенных к скорректированным величинам сигналов, а вычисление азимута и зенитного угла скважины производят по полученным амплитудам и начальным фазам идеальных синусоид, дополнительно, перед эксплуатацией, проводят эталонирование инклинометра с определением амплитудных и фазовых искажений выходных характеристик прибора, по которым, исходя из требуемой точности, формируют «допустимые» области использования фазового метода, а в эксплуатации в «допустимых» областях азимут вычисляют, используя фазовый метод, а в «недопустимых» - амплитудный.
Кроме того, число ориентации N выбирают из условия N≥8+2m, где m=0, 1, 2, 3,….
Вычисление азимута и зенитного угла скважины производится после выделения систематической составляющей дрейфа гироскопа.
Предложенный способ базируется на том, что при совершении полного оборота (на 360 угл.град.) вокруг продольной оси корпуса инклинометра сигналы с акселерометра и ВОГ должны представлять собой идеальные синусоиды. Причем по амплитуде идеальной синусоиды сигнала с акселерометра определяется зенитный угол, по положению максимального значения амплитуды определяют апсидальный угол и положение апсидальной плоскости. По начальной фазе идеальной синусоиды сигнала с гироскопа(ов) относительно апсидальной плоскости определяют азимут инклинометра в системе координат, связанной с апсидальной плоскостью. Инклинометр лежит в апсидальной плоскости. Апсидальная плоскость перпендикулярна плоскости горизонта.
Задачей способа является измерение значений выходных сигналов с чувствительных элементов в N ориентациях и построение идеальных синусоид, максимально приближенных к измеренным значениям, выделение систематических погрешностей чувствительных элементов, определение начальных фаз и амплитуд сигналов с гироскопа. При определении параметров идеальных синусоид использован метод последовательных приближений.
Проиллюстрируем вышеизложенное на примере обработки сигнала с акселерометра.
Сигналы измеряются в N ориентациях, при этом оси чувствительности ЧЭ занимают положения (рад), где i - номер текущей ориентации.
В случае идеальных ЧЭ зависимость выходного сигнала ЧЭ от текущей ориентации является функцией синуса и описывается выражением:

Сигнал с акселерометра в общем случае имеет вид:
UG=U0(t)+k(t)-Gi+ξ(t),
где:
UG - выходной сигнал ЧЭ;
U0(t) - нулевое смещение сигнала в зависимости от времени;
k(t) - коэффициент передачи в зависимости от времени;
Gi - входное воздействие;
ξ(t) - случайная погрешность.
Производим следующие операции:
1. Определяем вектор, содержащий сигналы акселерометра в каждой ориентации:
2. Определяем нулевое отклонение  :
:
3. Корректируем значения компонент вектора UG на величину нулевого отклонения:
4. Определяем параметры идеального синусоидального сигнала:
а) Определяем начальную амплитуду идеальной синусоиды  :
:
б) Задаем начальную фазу идеальной синусоиды φИД=0.
в) Вычисляем компоненты вектора идеального синусоидального сигнала:

г) Варьируя фазу идеального синусоидального сигнала φИД (используя один из методов поиска экстремума, например метод последовательных приближений) минимизируем функционал:

д) Фиксируем значение φИД, при котором функционал F(φИД} минимален.
е) Варьируя амплитуду идеального синусоидального сигнала (используя метод последовательных приближений), минимизируем функционал:

ж) Фиксируем значение , при котором функционал  минимален.
минимален.
Получаем:  - начальная фаза идеального синусоидального сигнала;
- начальная фаза идеального синусоидального сигнала;
 - амплитуда идеального синусоидального сигнала.
- амплитуда идеального синусоидального сигнала.
Начальная фаза  в данном случае соответствует апсидальному углу ϕ, значение
в данном случае соответствует апсидальному углу ϕ, значение  используется при определении зенитного угла.
используется при определении зенитного угла.
Конечные формулы вычисления зенитного и азимутального углов имеют вид:
Знак «+» или «-» в формуле зенитного угла определяется логическим сигналом, формируемым по сигналам датчика горизонта.
Аналогичным образом способ применяется и для восстановления идеального синусоидального сигнала гироскопа, в результате получаем амплитуду  и начальную фазу идеальной синусоиды
и начальную фазу идеальной синусоиды  .
.
В связи с тем, что амплитудная и фазовая характеристики в некоторых областях диапазона зенитных и азимутальных углов имеют существенные нелинейные искажения и вышеописанным способом не удается восстановление идеального синусоидального сигнала, в заявленном способе предложено проведение ряда дополнительных процедур.
Инклинометр подвергается эталонированию в нормальных условиях на специальном стационарном оборудовании. Эталонирование проводится в следующих диапазонах углов:
- азимутальные углы в диапазоне 0…360 град, с дискретностью 30 град;
- зенитные углы в диапазоне 0…90 град, с дискретностью 10 град.
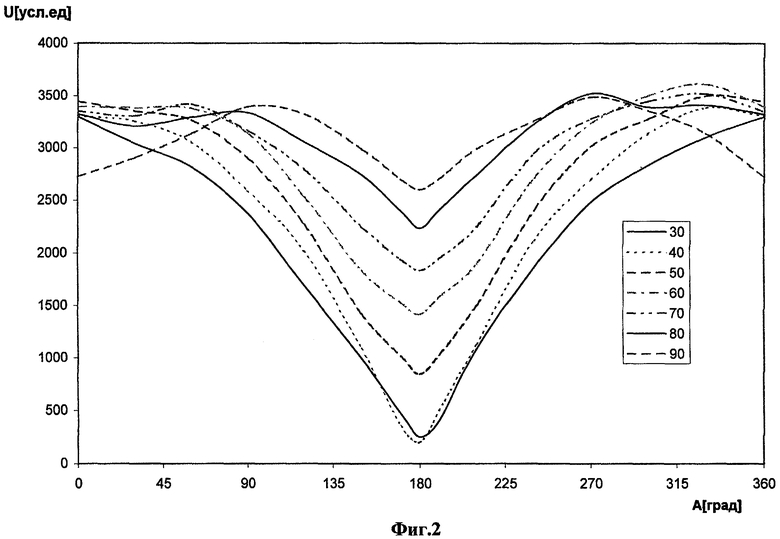
По данным, полученным на этапе эталонирования, после обработки первичной информации определяются амплитудная и фазовая характеристики выходных параметров прибора.
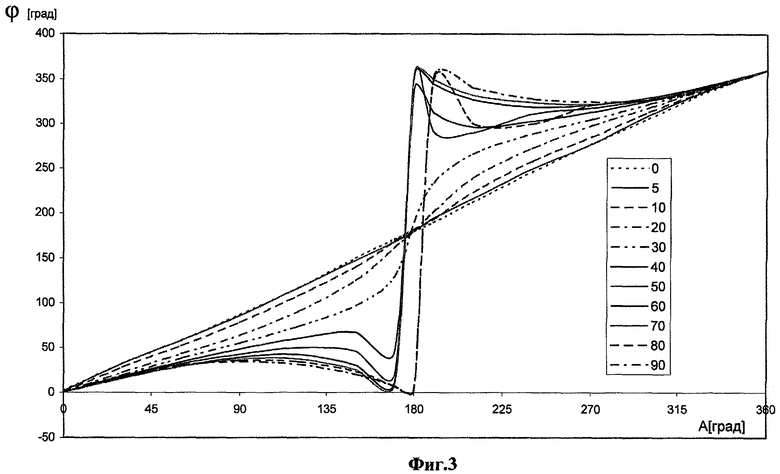
Примерный вид амплитудной характеристики для различных зенитных и азимутальных углов представлен на Фиг.2. Примерный вид фазовой характеристики для различных зенитных и азимутальных углов представлен на Фиг.3.
Из анализа амплитудных и фазовых характеристик следует, что при заданных погрешностях:
- допустимые фазовые искажения по фазовой характеристике находятся в зоне зенитных углов до 35 град, во всем диапазоне азимутальных углов;
- допустимые фазовые искажения по фазовой характеристике находятся в зоне зенитных углов до 90 град, в диапазоне азимутальных углов 0…30 град и 270…360 град;
- допустимые амплитудные искажения по амплитудной характеристике находятся в зоне зенитных углов от 35 до 90 град, в диапазоне азимутальных углов 120…240 град.
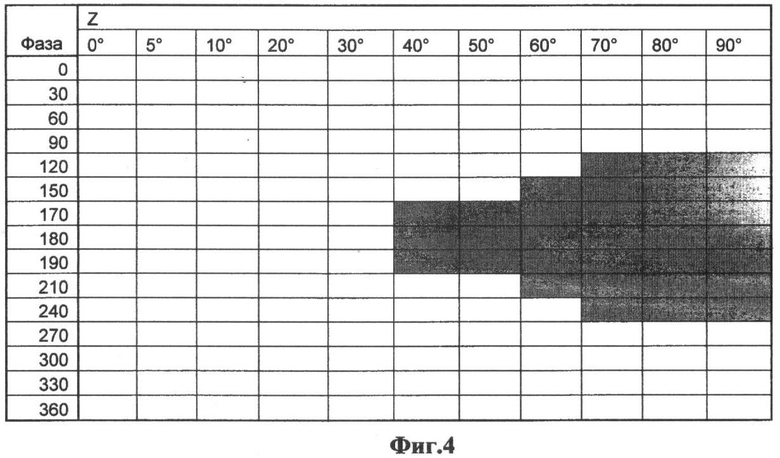
Используя полученные результаты, формируем «допустимые» области применения фазового метода определения азимута Фиг.4 (затемнена «недопустимая» область).
В эксплуатации в «допустимых» областях азимут вычисляют фазовым методом согласно ранее приведенным формулам, а в «недопустимых» - амплитудным методом, используя результаты эталонирования.
Гироскопический инклинометр, реализующий предложенный способ, включает в себя (Фиг.1) волоконно-оптический гироскоп 1, например, ВГ-941 разработки НПФ «Физоптика», микромеханический акселерометр 2 маятникового типа, например, разработки фирмы «РСВ» США, двухкомпонентный датчик горизонта 3, например, выполненный на основе датчиков АДХL-210 (США). Указанные чувствительные элементы размещены на поворотной платформе 4, установленной на подшипниках в корпусе 5 с возможностью неограниченного вращения относительно его продольной оси. Оси чувствительности ВОГ и акселерометра коллинеарны и ортогональны продольной оси корпуса. Оси чувствительности датчика горизонта ортогональны между собой и также ортогональны продольной оси корпуса. Поворотная платформа имеет привод 6, например шаговый двигатель, и датчик углового положения (ДУЛ) 7 платформы относительно корпуса, например, многополюсный поворотный трансформатор. Для электрической связи чувствительных элементов с сервисной электроникой по оси поворотной платформы установлено устройство электрической связи между поворотной платформой и корпусом (например, щеточный коллектор) 8. Поворотная платформа выполнена в виде пустотелого цилиндра с установочными базами на его внутренней поверхности (на Фиг.1 не показаны), а фланец имеет цапфы под подшипники и установочные поверхности для датчика углового положения и устройства электрической связи между поворотной платформой и корпусом, внутри цапф выполнено сквозное отверстие для электрических проводов. В отсеке электронных устройств размещены блок сервисных электронных устройств 9 и блок обработки информации 10 (микропроцессор). На корпусе имеется электроразъем 11. Блок сервисных электронных устройств имеет в своем составе блок питания, блок управления, усилители и аналого-цифровые преобразователи сигналов с чувствительных элементов и с датчика углового положения. Корпус инклинометра может иметь защитный герметичный кожух 12, выполненный, например, из титана, с герморазъемом 13. Кожух фиксируется относительно корпуса с помощью кольцевых шайб 14 из материала с малой теплопроводностью. Полость между корпусом и кожухом может быть вакуумирована для улучшения теплового режима прибора.
Проведенные на предприятии «Тренд» теоретические и экспериментальные исследования показали, что при использовании предложенного способа обработки сигналов первичной информации и задании N=8 погрешности в определении азимута и зенитного угла уменьшаются в ~ (4-6) раз. Точность можно повысить, увеличив число ориентации и количество точек в каждой ориентации, но при этом возрастает время измерения.
Гироскопический инклинометр работает следующим образом. Инклинометр в составе буровой колонны или отдельно опускают в скважину на нужную глубину. По кабелю, связывающему инклинометр с наземным оборудованием, подают питание. При подаче питания в блоке управления запускается циклограмма измерений, по исполнении которой поворотная платформа разворачивается в заданные ориентации  и в каждой из них осуществляется съем информации с гироскопа, акселерометра и датчика горизонта. Время измерения в каждой ориентации ≈6 секунд, время измерительного цикла ≈1 минута. Усиленные и преобразованные в цифровую форму сигналы поступают в блок обработки информации, где они предварительно обрабатываются и запоминаются. По завершении полного оборота блок обработки информации начинает вычислительные операции, реализуя алгоритм определения параметров идеальных синусоид, и определения азимутального и зенитного углов с учетом допустимой зоны использования фазового метода. Результаты вычислений могут накапливаться в запоминающем устройстве или в режиме реального времени или по запросу передаваться в наземное оборудование заказчика (PC). Для повышения точности определения угловой ориентации скважины измерительные циклы могут быть повторены. После автоматического снятия питания инклинометр опускают в следующую точку скважины и т.д.
и в каждой из них осуществляется съем информации с гироскопа, акселерометра и датчика горизонта. Время измерения в каждой ориентации ≈6 секунд, время измерительного цикла ≈1 минута. Усиленные и преобразованные в цифровую форму сигналы поступают в блок обработки информации, где они предварительно обрабатываются и запоминаются. По завершении полного оборота блок обработки информации начинает вычислительные операции, реализуя алгоритм определения параметров идеальных синусоид, и определения азимутального и зенитного углов с учетом допустимой зоны использования фазового метода. Результаты вычислений могут накапливаться в запоминающем устройстве или в режиме реального времени или по запросу передаваться в наземное оборудование заказчика (PC). Для повышения точности определения угловой ориентации скважины измерительные циклы могут быть повторены. После автоматического снятия питания инклинометр опускают в следующую точку скважины и т.д.
При реализации технических решений по заявке получены следующие результаты:
Создан гироскопический инклинометр с минимальными массогабаритными характеристиками (диаметр 33 мм, длина 1000 мм, вес 3 кг), что позволяет его использовать в глубинных геолого-разведочных скважинах диаметром до 40 мм и т.п.
Определение амплитудной и фазовой выходных характеристик инклинометра на этапе эталонирования и формирование допустимых областей использования фазового метода позволило обеспечить высокую точность и работоспособность инклинометра во всем диапазоне зенитных и азимутальных углов. Аналоги прибора имеют ограничения как по точности, так и по диапазону использования.
Приоритетное использование фазового метода перед амплитудным позволяет на порядок повысить точность измерения, т.к. фаза практически не изменяется при изменении температуры окружающей среды и при колебаниях питающего напряжения. Известно, что температура нефтяной скважины с каждым километром глубины увеличивается на 30°С. Так, на глубине 4 км температура составляет 120°С. Амплитудный же метод используется лишь в ограниченной зоне телесного угла, где использование фазового метода невозможно из-за существенных нелинейных искажений фазовой характеристики.
Изготовлены опытные образцы инклинометра по предложенному изобретению. Отработано алгоритмическое и программное обеспечение. Экспериментальная проверка подтвердила в лабораторных и натурных условиях высокую эффективность заявленных технических решений.
Источники информации
1. RU 2030574 С1, 1995.
2. RU 2095563 C1, 1997.
3. RU 2104490 C1, 1998.
4. RU 2178523 C2, 2002.
5. RU 2282717 C1, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 2005 |
|
RU2282717C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ НЕПРЕРЫВНОГО ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2504651C2 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
Изобретение относится к определению параметров траекторий нефтяных, газовых, геотермальных, железорудных и др. скважин, преимущественно в составе навигационных систем комплексов наклонно-горизонтального бурения. Техническим результатом изобретения является повышение точности и расширение эксплуатационных возможностей способа. Для этого измерения угловой скорости проводятся гироскопом и акселерометром, установленными на поворотной платформе не менее чем в 8 ориентациях. При этом по измеренным сигналам, используя метод последовательных приближений, определяются параметры идеальных синусоид: амплитуды и начальные фазы, по которым и вычисляются азимутальный и зенитный углы. В процессе обработки сигналов систематические составляющие погрешностей чувствительных элементов компенсируются. Причем перед эксплуатацией проводят эталонирование инклинометра с определением амплитудных и фазовых выходных характеристик прибора, по которым, исходя из требуемой точности, формируют «допустимые» области использования фазового метода, а в эксплуатации в «допустимых» областях азимут вычисляют, используя фазовый метод, а в «недопустимых» - амплитудный. 1 з.п. ф-лы, 4 ил.
1. Способ определения угловой ориентации скважин гироскопическим инклинометром, включающий измерение в нескольких ориентациях проекций угловой скорости вращения Земли и проекций ускорения силы тяжести на оси, связанные с корпусом инклинометра, и вычисление азимута и зенитного угла скважины с учетом выделенного дрейфа гироскопа, при этом в качестве измерителя угловой скорости используют гироскопический чувствительный элемент, при измерениях совершают поворот платформы на 360°, измерения проводят в ориентациях  (рад), где i - номер текущей ориентации, N - число ориентации, по полученным измерениям определяют нулевые отклонения, вычисляя средние значения измеренных сигналов, корректируют измеренные значения на величины нулевых отклонений и, используя метод последовательных приближений, определяют амплитуды и начальные фазы идеальных синусоид, максимально приближенных к скорректированным величинам сигналов, а вычисление азимута и зенитного угла скважины производят по полученным амплитудам и начальным фазам идеальных синусоид, отличающийся тем, что перед эксплуатацией дополнительно проводят эталонирование инклинометра с определением амплитудных и фазовых искажений выходных характеристик прибора, по которым, исходя из требуемой точности, формируют «допустимые» области использования фазового метода определения азимута, а в эксплуатации в «допустимых» областях азимут вычисляют, используя фазовый метод, а в «недопустимых» - используя амплитудный метод.
(рад), где i - номер текущей ориентации, N - число ориентации, по полученным измерениям определяют нулевые отклонения, вычисляя средние значения измеренных сигналов, корректируют измеренные значения на величины нулевых отклонений и, используя метод последовательных приближений, определяют амплитуды и начальные фазы идеальных синусоид, максимально приближенных к скорректированным величинам сигналов, а вычисление азимута и зенитного угла скважины производят по полученным амплитудам и начальным фазам идеальных синусоид, отличающийся тем, что перед эксплуатацией дополнительно проводят эталонирование инклинометра с определением амплитудных и фазовых искажений выходных характеристик прибора, по которым, исходя из требуемой точности, формируют «допустимые» области использования фазового метода определения азимута, а в эксплуатации в «допустимых» областях азимут вычисляют, используя фазовый метод, а в «недопустимых» - используя амплитудный метод.
2. Способ по п.1, отличающийся тем, что число ориентации N выбирают из условия N≥8+2m, где m=0, 1, 2, 3, …
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 2005 |
|
RU2282717C1 |
| Способ определения направления движения бурового снаряда | 1980 |
|
SU973808A1 |
| Способ определения азимута искривления траектории скважины | 1988 |
|
SU1555470A1 |
| RU 2004786 C1, 15.12.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2204490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ОРИЕНТАЦИИ СКВАЖИНЫ И ИНКЛИНОМЕТР | 2003 |
|
RU2253838C2 |
| ВАЛОПОВОРОТНОЕ УСТРОЙСТВО | 1997 |
|
RU2135783C1 |

