Изобретение относится к навигационным гироскопическим приборам, а именно к измерителям азимута на земной поверхности, и может быть использовано в геодезии, а также для прицеливания беспилотных летательных аппаратов, артиллерийских и ракетных систем или иных объектов военного и гражданского назначения.
Современный уровень развития техники предъявляет все более высокие требования к навигационным приборам, в частности к гирокомпасам. Основными из этих требований являются:
- высокая точность прибора (погрешность определения азимута - единицы угловых секунд);
- малое время готовности - 5-10 минут;
- полевые условия эксплуатации, т.е. температура окружающей среды от минус 40 до плюс 50 градусов С, относительная влажность до 98% при температуре +25° С;
- высокие надежность и ресурс работы (до 50000 часов);
- работа прибора в автоматическом режиме с использованием новейших вычислительных средств;
- малые габариты и вес, удобство при эксплуатации.
Выполнение вышеперечисленных, подчас противоречивых, требований представляет собой сложную научно-техническую задачу.
Анализ известных технических решений показал следующее.
Известен гирокомпас [1], в котором использован поплавковый интегрирующий гироскоп в качестве датчика угловой скорости Земли и два устройства для приведения гироскопа в исходное положение. Гироскоп располагается на основании (платформе), которая посредством двух кардановых колец с опорами и датчиками по осям соединяется с неподвижным корпусом. В этом гирокомпасе используется принцип позиционного гирокомпасирования, в котором ось чувствительности гироскопа, закрепленного на платформе, устанавливается в плоскости меридиана, а об азимуте судят по сигналам датчика угла (индикатора), который указывает относительное положение платформы относительно корпуса. Недостатком такого гирокомпаса является сложность конструкции, увеличенные габариты и масса из-за наличия кардановых колец с датчиками по осям и обслуживающих их электронных устройств. Недостатком является и ухудшение точности определения азимута из-за дополнительных угловых погрешностей, обусловленных большим количеством конструктивных стыков (кардановые кольца, опоры и т.д.) между осью чувствительности и корпусом, а также трудностью обеспечения стабильной температуры на всех элементах кинематически сложной конструкции, особенно в условиях эксплуатации, при колебаниях окружающей температуры.
В устройстве гироскопического прицеливания, построенном на основе изобретения [2], поплавковый интегрирующий гироскоп используется для измерения азимутальной ошибки предварительного прицеливания различных объектов связи по магнитному компасу и коррекции ошибки прицеливания. Для выставки оси чувствительности гироскопа в горизонт используются спиртовые уровни. При этом предусмотрены две системы разворота гироскопа: одна на угол 180° вокруг выходной оси гироскопа - для исключения дрейфа гироскопа от постоянного смещения и разбалансировки, а вторая - на угол 90° вокруг оси вращения ротора гироскопа - для обеспечения режимов измерения азимута и режима прицеливания объекта. Это усложняет конструкцию, увеличивает массу и габариты, кроме того, точность такого прибора ухудшается за счет длинной конструктивной цепи между пузырьковыми уровнями и осью чувствительности гироскопа, а также между фиксаторами положения, расположенными на корпусе устройства, и осью чувствительности гироскопа, особенно при температурных и механических воздействиях на прибор. Точность прицеливания ухудшается и за счет того, что привязка прицеливаемого объекта к оси чувствительности осуществляется по метке (это может быть упор, зеркальная поверхность и т.д.), расположенной на корпусе устройства, а ось чувствительности гироскопа расположена на подвижной части через цепь подвижных и неподвижных стыков и соединений, взаимное положение деталей которых меняется при температурных и механических воздействиях на устройство.
Известен автоматический гирокомпас [3], содержащий блок чувствительных элементов (БЧЭ) в составе датчика угловой скорости (ДУСа) и датчиков горизонта, установленный в корпусе гирокомпаса с возможностью разворота вокруг вертикальной оси, систему разворота БЧЭ, включающую задатчик разворота и привод, а также оптический элемент, блоки сервисной электроники и вычислительное устройство.
Данный гирокомпас не обеспечивает требуемой точности, поскольку в нем не предусмотрены средства, обеспечивающие геометрическую стабильность оптической связи между оптическим элементом и потребителем.
В основу настоящего изобретения поставлена задача создания автоматического гирокомпаса высокой точности на длительный период эксплуатации в широком диапазоне температуры окружающей среды.
Поставленная задача решается тем, что в автоматическом гирокомпасе, содержащем блок чувствительных элементов (БЧЭ) в составе датчика угловой скорости и датчиков горизонта, установленный в корпусе гирокомпаса с возможностью разворота вокруг вертикальной оси, а также оптический элемент, блоки сервисной электроники и вычислительное устройство, согласно изобретению на корпусе выполнен иллюминатор с крышкой, имеющей тепловой аккумулятор, и горловина с нагревателем и посадочным местом под крышку иллюминатора.
Для повышения точности оптической привязки базового направления гирокомпаса, задаваемого зеркалом, установленным на основании БЧЭ, а также уменьшения энергопотребления на обогрев прибора (в том числе и иллюминатора на корпусе, через который осуществляется привязка), чтобы корпус содержал нагреватель и иллюминатор с унифицированными горловинами, закрываемыми поочередно одной и той же крышкой, содержащей тепловой аккумулятор. Известно, что для того чтобы стекло иллюминатора не искажало ход проходящих лучей за счет ″ запотевания″ , оно должно иметь температуру выше температуры окружающей среды как снаружи, так и внутри прибора. При подключенном электропитании прибора это осуществляется за счет термодатчиков и нагревательных элементов, расположенных на корпусе иллюминатора. Однако при отключении прибора и его остывании, особенно при отрицательной температуре окружающей среды снаружи прибора, требуемый градиент температур между стеклом иллюминатора и окружающей средой поддерживать иначе как за счет дополнительного источника энергии, например, батарей (см. [4], [5]) не представляется возможным, а это, в свою очередь, усложняет конструкцию и увеличивает энергопотребление.
Указанное противоречие разрешается с помощью крышки с тепловым аккумулятором, которая во включенном приборе надета на горловину нагревателя, а перед отключением прибора надевается на горловину иллюминатора, и после отключения прибора тепловой аккумулятор, отдавая тепло иллюминатору, поддерживает его температуру выше температуры окружающей среды в процессе остывания.
Поясним принцип действия гироскопического компаса. Он основан на использовании свойства гироскопа, работающего в режиме датчика угловой скорости, реагировать на абсолютную угловую скорость поворота основания, на котором установлен ДУС, в проекции на его ось чувствительности.
Будучи установленным на неподвижное относительно Земли основание, ДУС будет чувствовать угловую скорость вращения Земли в той мере, в какой величина угловой скорости Земли будет проектироваться на ось чувствительности ДУСа, т.е. измеренная величина угловой скорости в данном случае будет зависеть от ориентации оси чувствительности ДУСа по отношению к вектору угловой скорости вращения Земли. Если, например, расположить ДУС на неподвижном относительно Земли основании так, что его ось чувствительности будет располагаться в горизонтальной плоскости, а главная ось - ось кинетического момента - вертикально, т.е. будет совпадать с направлением вертикальной составляющей угловой скорости вращения Земли в данном месте, то ДУС будет чувствовать только проекцию горизонтальной составляющей угловой скорости вращения Земли на ось чувствительности. Если, например, ось направлена на север, то измеренная величина угловой скорости ω и будет соответствовать горизонтальной составляющей угловой скорости вращения Земли Ω г, а если будет отклонена, например, к востоку на угол А, то измеренная величина угловой скорости ω и будет соответствовать проекции Ω г на ось чувствительности, т.е.
ω и=Ω г·cosA=Ω з·cosϕ · cosA,
где ϕ - географическая широта места расположения ДУСа.
Отсюда следует, что если ось чувствительности ДУСа направить по дирекционному направлению, азимут которого не известен и его требуется определить, то можно, произведя измерения показаний ДУСа ω и и зная географическую широту места испытаний ϕ , решить задачу определения азимута А выбранного направления в виде:
Таким образом можно определить азимутальный угол любого требуемого направления с точностью до знака.
Для устранения неопределенности в знаке желательно было бы иметь две оси чувствительности, ортогональных друг к другу и располагаемых при измерениях в горизонтальной плоскости, как, например, это имеет место при использовании ДНГ. Тогда по соотношению знаков cosA и sinA можно однозначно определить, в каком из квадрантов располагается дирекционное направление. Однако, как упоминалось выше, в качестве чувствительного элемента в гирокомпасе используется поплавковый гироблок, имеющий одну ось чувствительности. Поэтому по одной ориентации оси чувствительности гироскопа, совмещаемой перед измерениями ω и и с дирекционным направлением, определить квадрант, в котором находится это направление, не представляется возможным. Для получения однозначного ответа на этот вопрос в рассматриваемом автоматическом гирокомпасе предусмотрено производить предварительное, достаточно грубое, измерение проекции угловой скорости Земли не менее чем в четырех ориентациях оси чувствительности, развернутых в горизонтальной плоскости друг относительно друга на угол π /2 с приходом в исходное положение, т.е. предусмотрено пять измерений ω
Для обеспечения требуемой точности определения азимута необходимо принудительно ориентировать ось чувствительности ДУСа в оптимальное направление запад-восток, т.е. в зону углов 90 и 270° , и точные измерения проводить в оптимальной ориентации. Разворот из исходного положения в оптимальную ориентацию производится автоматически по результатам определения грубого значения исходного положения. Погрешность углов разворота не должна превышать 0,5-1,0 угл.сек, что обеспечивается предварительной паспортизацией углов многополюсного датчика угла при изготовлении прибора.
Для исключения погрешности, обусловленной наличием в измеренном сигнале проекции вертикальной составляющей угловой скорости Земли вследствие наклона оси чувствительности ДУСа относительно горизонтальной плоскости, а также проявлением в этом случае ухода гироскопа от разбалансировки, необходимо иметь в гирокомпасе измерители наклона основания (датчики горизонта), обеспечивающие непрерывное измерение углов негоризонтальности основания БЧЭ.
Сущность изобретения поясняется чертежами, на которых представлены:
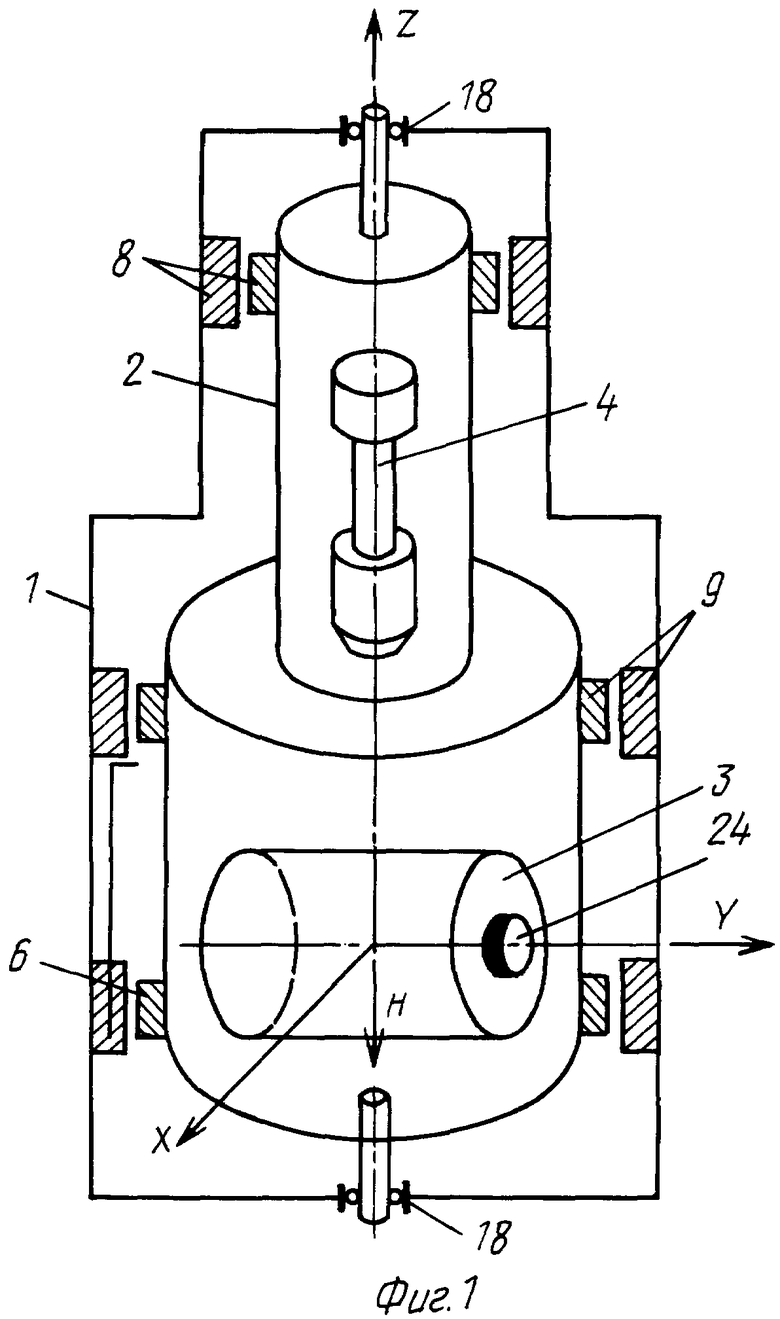
Фиг.1 - кинематическая схема гирокомпаса;
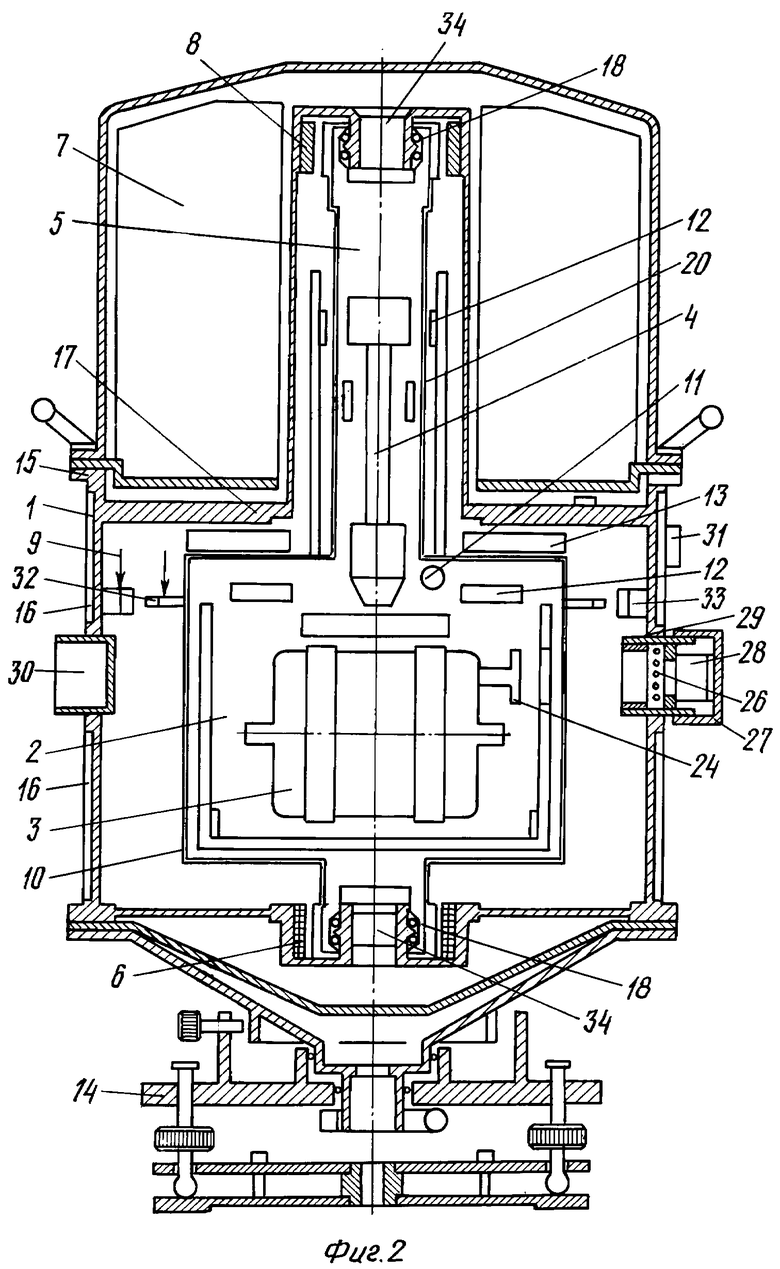
Фиг.2 - конструктивная схема гирокомпаса;
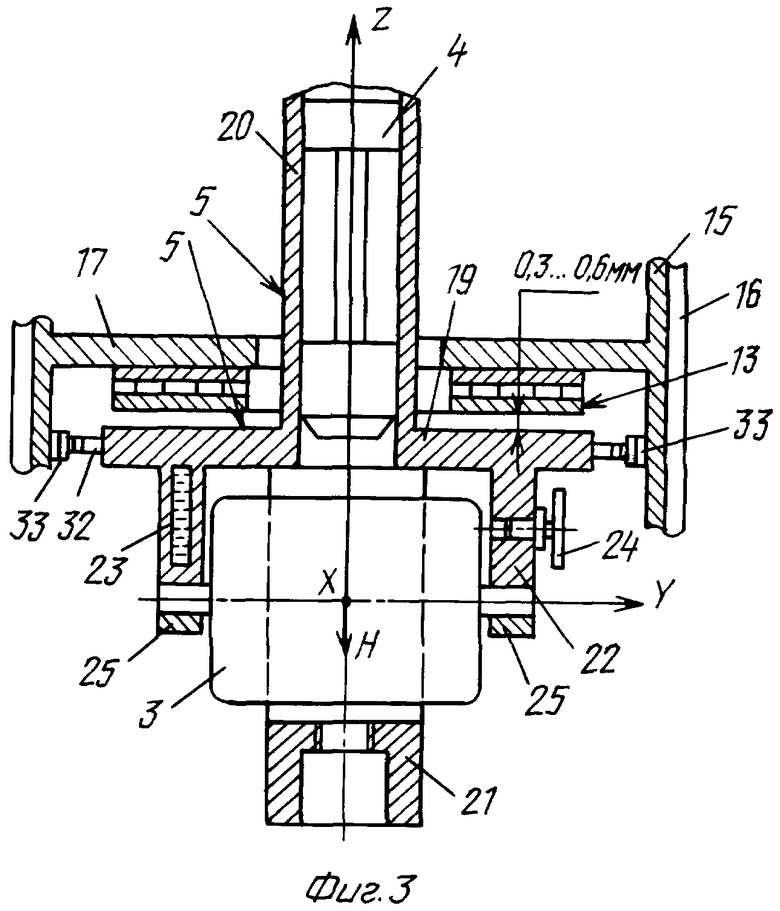
Фиг.3 - поперечный разрез гирокомпаса в зоне установки ДУСа.
Автоматический гирокомпас устроен, согласно изобретению, следующим образом.
В корпусе 1 установлен с возможностью разворота вокруг вертикальной оси блок чувствительных элементов (БЧЭ) 2 в составе датчика угловой скорости 3 и двухкоординатного датчика горизонта 4, размещенных на основании БЧЭ 5. Гирокомпас имеет систему разворота БЧЭ, в которую входят задатчик, содержащий поворотный трансформатор 6 и устройство управления (входит в блок сервисной электроники БСЭ 7), а также привод - безредукторный двигатель постоянного тока 8 и многополюсный индукционный датчик угла 9.
БЧЭ 2 выполнен в виде термостатированного модуля с замкнутой внешней оболочкой 10 и системой терморегулирования внутренней полости, имеющей термодатчики 11 и нагреватели 12. Тепловая связь между БЧЭ и корпусом осуществлена через термоэлектрические элементы (термоэлектрическую шайбу) 13.
Корпус 1 гирокомпаса установлен на наклонно-поворотном столе 14 и выполнен в виде обечайки 15 с вертикальными ребрами 16 и поперечной перегородкой 17 с центральным отверстием в ней. Посредством шарикоподшипниковых опор 18 корпус через переходные детали соединен с основанием БЧЭ 5.
Основание БЧЭ 5 выполнено в виде диска 19 с трубой 20 и аркой 21 по торцам диска. В зазоре между перегородкой корпуса 17 и плоскостью диска 19 размещена кольцевая термоэлектрическая шайба 13, при этом одной плоскостью шайба закреплена через теплопроводную пасту на перегородке корпуса 17, а между другой плоскостью шайбы 13 и основанием БЧЭ 5 образован зазор величиной 0,3-0,6 мм. В трубе 20 размещен двухкоординатный маятниковый датчик горизонта 4, а под аркой 21 на выступах 22, 23 диска закреплен гироскоп 3. На монолитном выступе 22 закреплено зеркало 24, выполненное из единого куска металла. Другой выступ 23 выполнен коробчатым и заполнен теплопроводной пастой.
Гироскоп 3 крепится на выступах 22 и 23 накладками 25 (фиг.3) к диску основания так, что ось его кинетического момента Н совпадает с осью вращения Z основания, выходная ось Y перпендикулярна оси Z и отражающей поверхности зеркала 24, а ось чувствительности Х перпендикулярна плоскости, образованной осями Н и Y. При этом, ослабив накладки 25 через технологические отверстия (не разбирая прибора), гироскоп можно разворачивать на 90° относительно оси Y от упора до упора (на фиг.3 упоры не показаны), т.е. до совмещения оси чувствительности гироскопа Х с осью Z при определении и паспортизации углов между полюсами датчика угла.
Двухкоординатный датчик горизонта представляет собой маятник, подвешенный на струне в жидкости и имеющий две взаимно перпендикулярные оси чувствительности Хм и Yм ( на фиг.3 не показаны), закреплен внутри трубы 20 основания 5 (элементы крепления не показаны) в положении, когда одна из осей чувствительности Хм параллельна оси чувствительности гироскопа X.
На корпусе напротив зеркала при исходном положении БЧЭ выполнен иллюминатор 26 с крышкой 27 (фиг.2), имеющей тепловой аккумулятор 28 из материала с высокой теплоемкостью, сопрягающийся с крышкой через теплоизолирующую прокладку. Крышка надета на горловину 29 с нагревателем (не показан). На корпусе 1 со стороны, диаметрально противоположной иллюминатору 26, расположена унифицированная горловина 30 с нагревателем (не показан) для установки крышки 27 при работе гирокомпаса.
В верхней части корпуса расположены индикаторы негоризонтальности БЧЭ 31, электрически связанные через блок сервисной электроники с двухкоординатным датчиком горизонта. Индикаторы могут быть выполнены в виде световых линеек на светодиодах.
Электрическая связь между БЧЭ и корпусом гирокомпаса осуществляется через коллекторные токоподводы 34.
Работа автоматического гирокомпаса осуществляется следующим образом.
При включении гирокомпаса подается питание на чувствительные элементы 3, 4 и блоки сервисной электроники 7, при этом включаются системы терморегулирования ЧЭ, модуля БЧЭ 11, 12, а также нагреватели иллюминатора 26 и горловины 30. Одновременно оператор снимает крышку иллюминатора 27 и надевает ее на горловину 30, а затем по показаниям индикаторов негоризонтальности 31 выставляет основание БЧЭ 5 в горизонт изменением наклонов корпуса гирокомпаса посредством регулировочных маховиков наклонно-поворотного стола 14.
В течение времени готовности гирокомпас выходит на тепловую и точностную готовности. При достижении тепловой готовности, о чем свидетельствуют индикаторы на пульте управления, включают режим приведения БЧЭ в исходное положение, после чего осуществляют оптическую привязку зеркала 24 к внешнему потребителю (например, теодолиту).
Далее включают режим автоматического определения азимута базового направления, задаваемого зеркалом. Данный режим имеет первоначальное грубое определение азимута посредством разворотов БЧЭ в “нули” полюсов ДУ 9, измерение проекций угловой скорости вращения Земли в этих ориентациях, грубое вычисление азимута по ранее указанным формулам. Для спроектированного гирокомпаса кратковременные (грубые) измерения проводятся в пяти ориентациях БЧЭ через 90° : 0, 90, 180, 270, 360° с учетом систематических паспортизованных погрешностей ориентации базового направления для указанных ориентации БЧЭ. По результатам этих измерений из условия минимума модуля получаемых значений определяют две наиболее информативных ориентации, отличающихся друг от друга на 180° (в этих ориентациях ось чувствительности ДУСа находится ближе к направлению запад-восток, чем во всех других, из имеющегося набора). В найденных ориентациях производятся точные (с требуемой временной базой осреднения) измерения, по которым и определяют азимут.
По окончании работы гирокомпаса и выключения питания оператор снимает крышку иллюминатора 27 с горловины 30 и надевает ее на горловину иллюминатора 29. Тепловой аккумулятор 28 отдает накопленную тепловую энергию иллюминатору, поддерживая его температуру выше температуры окружающей среды в процессе остывания. Тем самым предотвращается запотевание иллюминатора продуктами гажения элементов гирокомпаса и не допускается ухудшение прозрачности иллюминатора и искажение оптических связей между зеркалом и потребителем.
На гирокомпас выпущена конструкторская документация, изготовлены опытные образцы прибора, испытания которых подтвердили эффективность заложенных технических решений.
Источники информации
1. Патент США №2902772, НПК 33/321, 1959.
2. Патент США №4087919, НПК 33/301, 1978.
3. Патент ЕР №0250608, МПК G 01 С 19/38, 1990.
4. Патент США №3225173, НПК 219/202, 1968.
5. Патент США №4709134, НПК 219/201, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ | 2015 |
|
RU2610389C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС И СПОСОБЫ ЕГО РЕГУЛИРОВАНИЯ | 2002 |
|
RU2222779C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2020 |
|
RU2753900C1 |
| Способ гирокомпасирования с применением датчика угловой скорости | 2018 |
|
RU2698567C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2019 |
|
RU2737383C1 |
| ГИРОКОМПАС | 2013 |
|
RU2526477C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
Изобретение относится к гироскопическим приборам для навигации, геодезии, измерения азимута на земной поверхности. Сущность изобретения: в наземном гирокомпасе, имеющем оптический элемент на блоке чувствительных элементов, на корпусе выполнен иллюминатор с крышкой, имеющей тепловой аккумулятор, и горловина с нагревателем и посадочным местом под крышку иллюминатора. Достигаемый технический результат - обеспечение геометрической стабильности оптической связи между оптическим элементом и потребителем. 3 ил.
Автоматический гирокомпас, содержащий блок чувствительных элементов в составе датчика угловой скорости и датчиков горизонта, установленный в корпусе гирокомпаса с возможностью разворота вокруг вертикальной оси, а также оптический элемент, блоки сервисной электроники и вычислительное устройство, отличающийся тем, что на корпусе выполнены иллюминатор с крышкой, имеющей тепловой аккумулятор, и горловина с нагревателем и посадочным местом для крышки иллюминатора.
| ПАТЕНТНО- ..« ТЕХНИЧЕСКАЯ '^' | IБИБЛИОТЕКА^ЦЕНТРИФУГА | 0 |
|
SU250608A1 |
| US 2902772 А, 08.09.1959 | |||
| SU 864925 А, 10.02.2000 | |||
| ГРАВИМЕТР | 1997 |
|
RU2127439C1 |
| US 3225173 А, 21.12.1965 | |||
| US 4709134 A, 24.11.1987. | |||

