ОБЛАСТЬ ТЕХНИКИ
[0001] Заявленное техническое решение в общем относится к области вычислительной техники, а в частности к автоматизированному способу и системе классификации повреждений транспортного средства (ТС) с помощью алгоритмов машинного обучения.
УРОВЕНЬ ТЕХНИКИ
[0002] Из уровня техники известен патент US 20200111170 А1 "System and method for vehicle crash event data analysis and cost/loss estimation", патентообладатель: OLDHAM RUSS, опубликовано: 09.04.2020. В данном решении описывается транспортное средство, содержащее специальное устройство с акселерометром для обнаружения аварии.
[0003] При обнаружении аварии специальное устройство с акселерометром отправляет сигнал тревоги вместе со специальным массивом данных на сервер. Сервер принимает данные об аварии и затем обрабатывает с помощью моделей машинного обучения: вначале выявляются аномалии в массиве данных, а затем эти аномалии классифицируются. В случае если хотя бы один удар, а в следствие и авария, классифицирован как убыток, сервер дополнительно с помощью моделей машинного обучения прогнозирует вероятные повреждения транспортного средства по конфигурации вероятных ударов.
[0004] Собранная и подготовленная информация об убытке предоставляется пользователю в веб-интерфейс. Дополнительно, пользователь может с помощью интерактивных форм внести дополнительные данные об убытке, а также провести разметку по предсказанным целевым признакам, указывая проверенные фактические.
[0005] Недостатком известного решения в данной области техники является отсутствие возможности автоматизированной точной классификации повреждений транспортного средства в результате дорожно-транспортного происшествия с учетом анализа скрытых повреждений, на основании данных телеметрии, собираемых с ТС, попавшего в ДТП, с их последующей обработкой массивом моделей машинного обучения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] В заявленном техническом решении предлагается новый подход к классификации повреждений транспортного средства в результате дорожно-транспортного происшествия (ДТП). В данном решении используются алгоритмы машинного обучения, которые позволяют усовершенствовать процесс классификации повреждений ТС в результате ДТП и повысить точность определения конкретных повреждений ТС.
[0007] Техническим результатом, достигающимся при реализации заявленного решения, является повышение точности определения повреждения ТС, за счет анализа сопутствующих повреждений с помощью модели машинного обучения, включая скрытые повреждение ТС при ДТП, на основании обработки телеметрической информации, получаемой от ТС.
[0008] Указанный технический результат достигается благодаря осуществлению компьютерно-реализуемого способа автоматизированной классификации повреждений транспортного средства (ТС) в результате дорожно-транспортного происшествия (ДТП), содержащего этапы, на которых:
- получают данные телеметрии с телематического устройства, установленного на ТС;
- формируют на основании полученных данных массив данных;
- определяют по меньшей мере один удар ТС с помощью первой модели машинного обучения, обрабатывающей массив телематических данных, осуществляющей выявление аномалий в показаниях телематического устройства;
- определяют конфигурацию удара ТС и тип убытка на основании полученного массива данных с помощью второй модели машинного обучения, обученной на выборке данных о конфигурациях ударов ТС, состоянии движения ТС и параметрах ТС;
- определяют перечень поврежденных деталей с учетом скрытых повреждений по конфигурации детектированных ударов с помощью третьей модели машинного обучения, обученной на выборке данных об убытках с учетом телематической информации при ДТП; и
- классифицируют повреждения ТС на основании определенного перечня поврежденных деталей.
[0009] В одном из частных вариантов реализации способа конфигурация ударов включает по меньшей мере одно из: силу удара, направление удара относительно центра масс ТС, скорость ТС во время удара, направление движения ТС, параметры ТС.
[0010] В другом частном варианте реализации способа параметры ТС определяются по VIN-коду ТС.
[0011] В другом частном варианте реализации способа телематическое устройство содержит акселерометр, антенну ГНСС и средство беспроводной связи.
[0012] В другом частном варианте реализации способа телематическое устройство дополнительно содержит одно из: датчик температуры, датчик дыма, датчик давления, гироскоп.
[0013] В другом частном варианте реализации способа средство беспроводной связи выбирается из группы: модем или Wi-Fi модуль.
[0014] В другом частном варианте реализации способа при определении перечня поврежденных деталей дополнительно определяется степень повреждения деталей.
[0015] В другом частном варианте реализации способа степень повреждения деталей определяется на основании геометрии повреждения вследствие удара.
[0016] В другом частном варианте реализации способа телематическое устройство представляет собой группу устройств интернета вещей (IoT).
[0017] Кроме того, заявленный технический результат достигается за счет системы автоматизированной классификации повреждений ТС в результате ДТП, содержащей, связанные между собой средствами беспроводной связи телематическое устройство, установленное на ТС, и сервер обработки данных, выполненный с возможностью:
- получать массив телематических данных с телематического устройства, установленного на ТС;
- определять по меньшей мере один удар ТС с помощью первой модели машинного обучения, обрабатывающей массив телематических данных, осуществляющей выявление аномалий в показаниях телематического устройства;
- определять конфигурацию удара ТС на основании полученного массива данных с помощью второй модели машинного обучения, обученной на выборке данных о конфигурациях ударов ТС;
- определять перечень поврежденных деталей с учетом скрытых повреждений по конфигурации детектированных ударов с помощью третьей модели машинного обучения, обученной на выборке данных об убытках с учетом телематической информации при ДТП; и
- классифицировать повреждения ТС на основании определенного перечня поврежденных деталей.
[0018] В одном из частных вариантов реализации системы конфигурация ударов включает по меньшей мере одно из: силу удара, направление удара относительно центра масс ТС, скорость ТС во время удара, направление движения ТС, параметры ТС.
[0019] В другом частном варианте реализации системы параметры ТС определяются по VIN-коду ТС.
[0020] В другом частном варианте реализации системы телематическое устройство содержит акселерометр, антенну ГНСС и средство беспроводной связи.
[0021] В другом частном варианте реализации системы телематическое устройство дополнительно содержит одно из: датчик температуры, датчик дыма, датчик давления, гироскоп.
[0022] В другом частном варианте реализации системы средство беспроводной связи выбирается из группы: модем или Wi-Fi модуль.
[0023] В другом частном варианте реализации системы при определении перечня поврежденных деталей дополнительно определяется степень повреждения деталей.
[0024] В другом частном варианте реализации системы степень повреждения деталей определяется на основании геометрии повреждения вследствие удара.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0025] Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей.
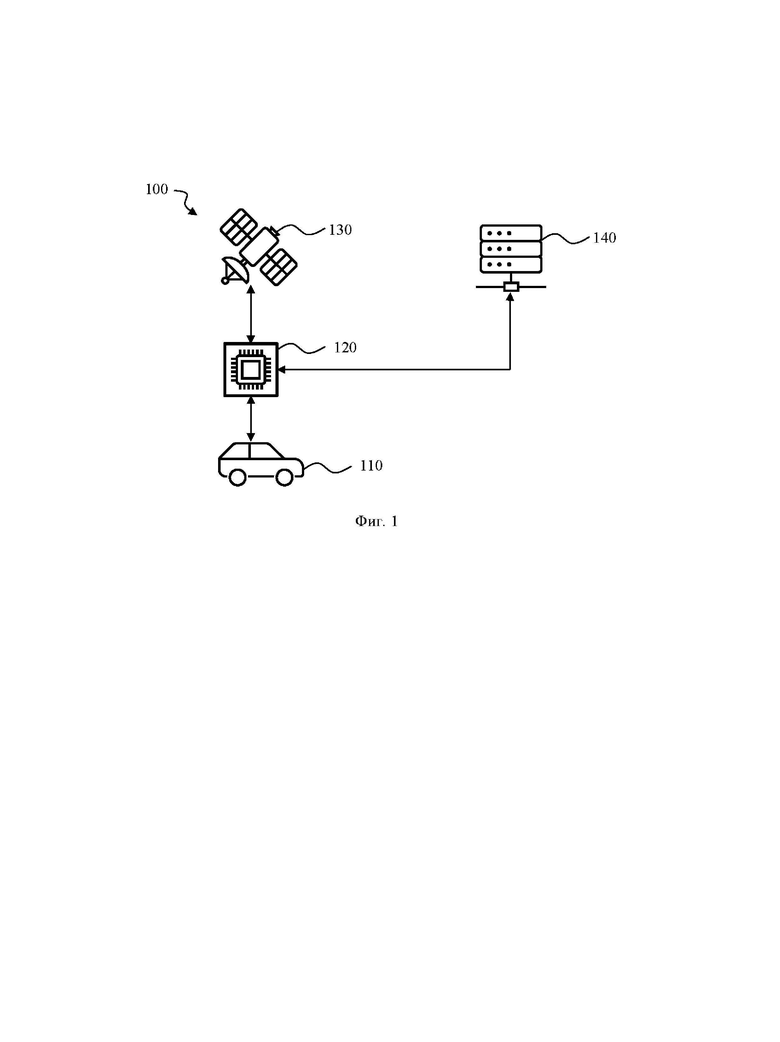
[0026] Фиг. 1 иллюстрирует пример реализации системы автоматизированной классификации повреждений транспортного средства (ТС) в результате ДТП.
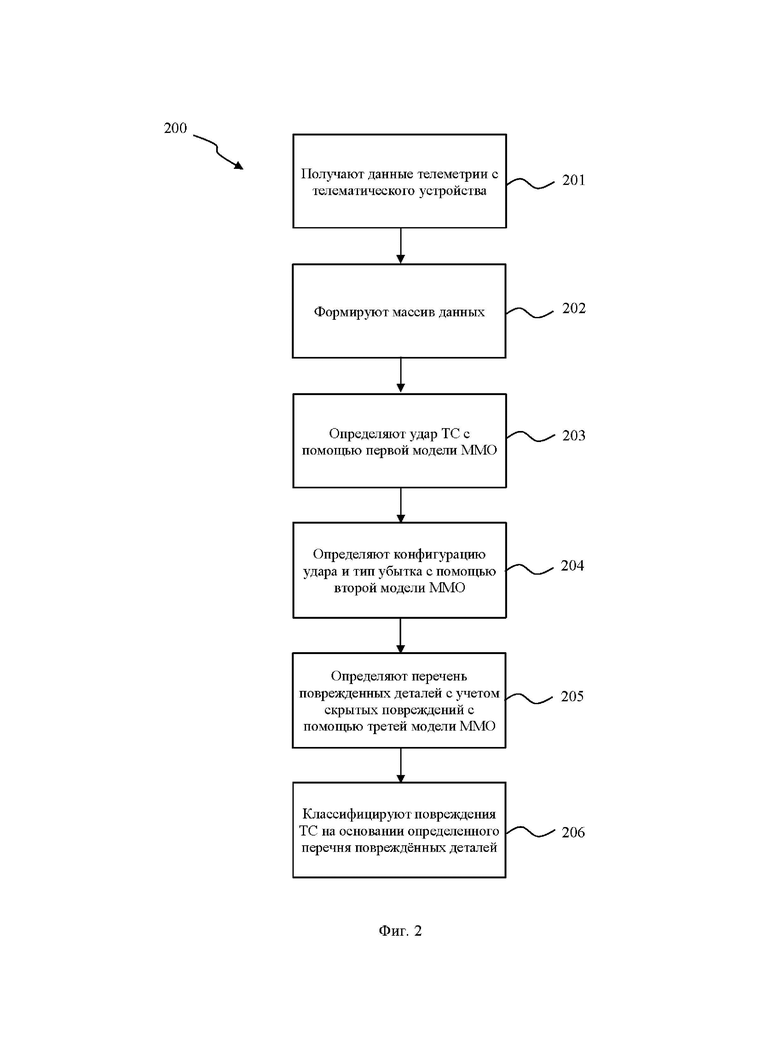
[0027] Фиг. 2 иллюстрирует блок-схему заявленного способа.
[0028] Фиг. 3 иллюстрирует пример определения перечня поврежденных деталей с учетом скрытых повреждений по конфигурации детектированных ударов.
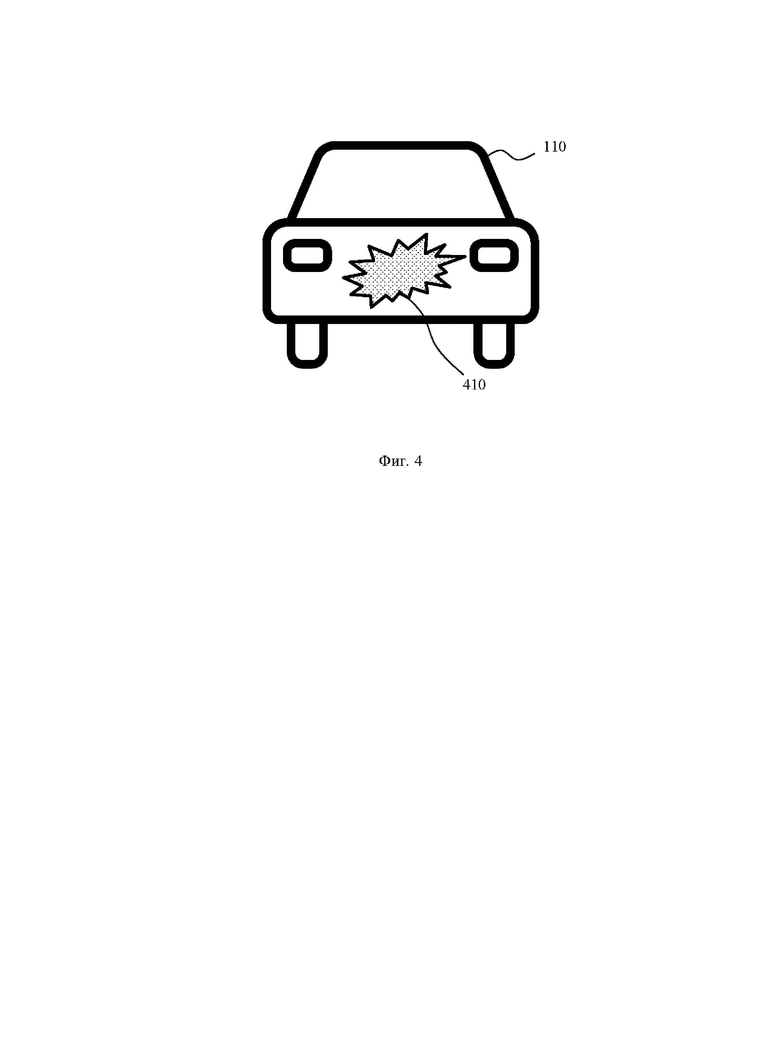
[0029] Фиг. 4 иллюстрирует пример определения степени повреждения деталей на основании геометрии повреждения вследствие удара.
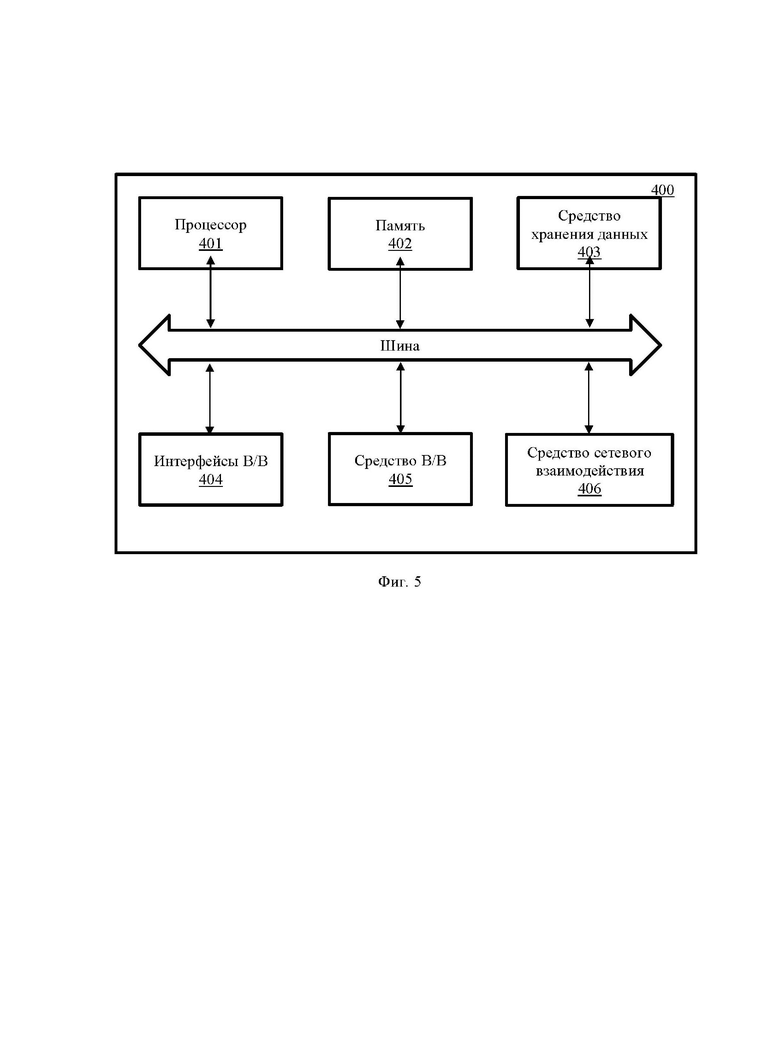
[0030] Фиг. 5 иллюстрирует пример вычислительного устройства.
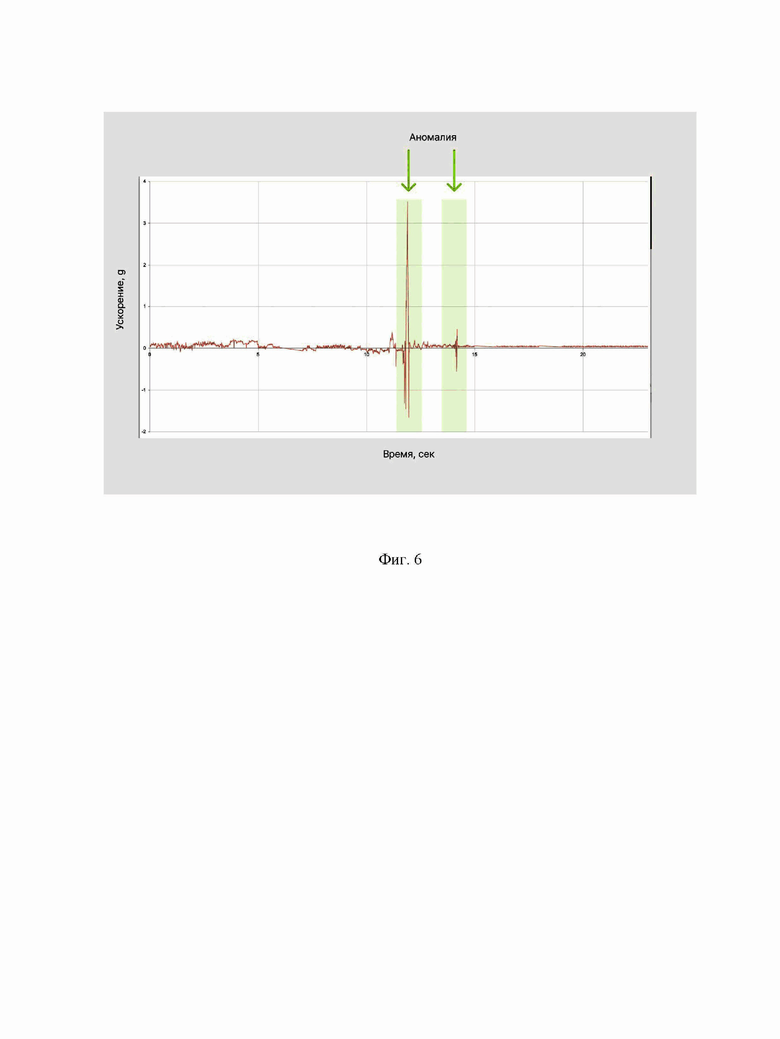
[0031] Фиг. 6 иллюстрирует пример выявления аномалий (вероятных ударов) с помощью первой модели машинного обучения.
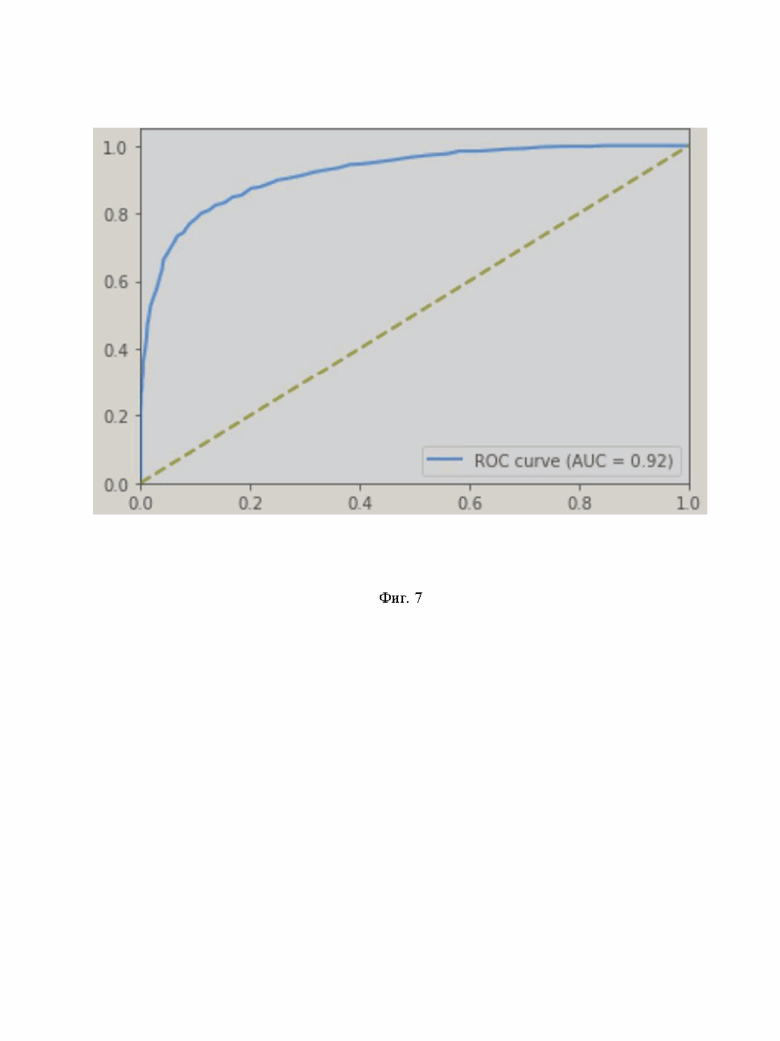
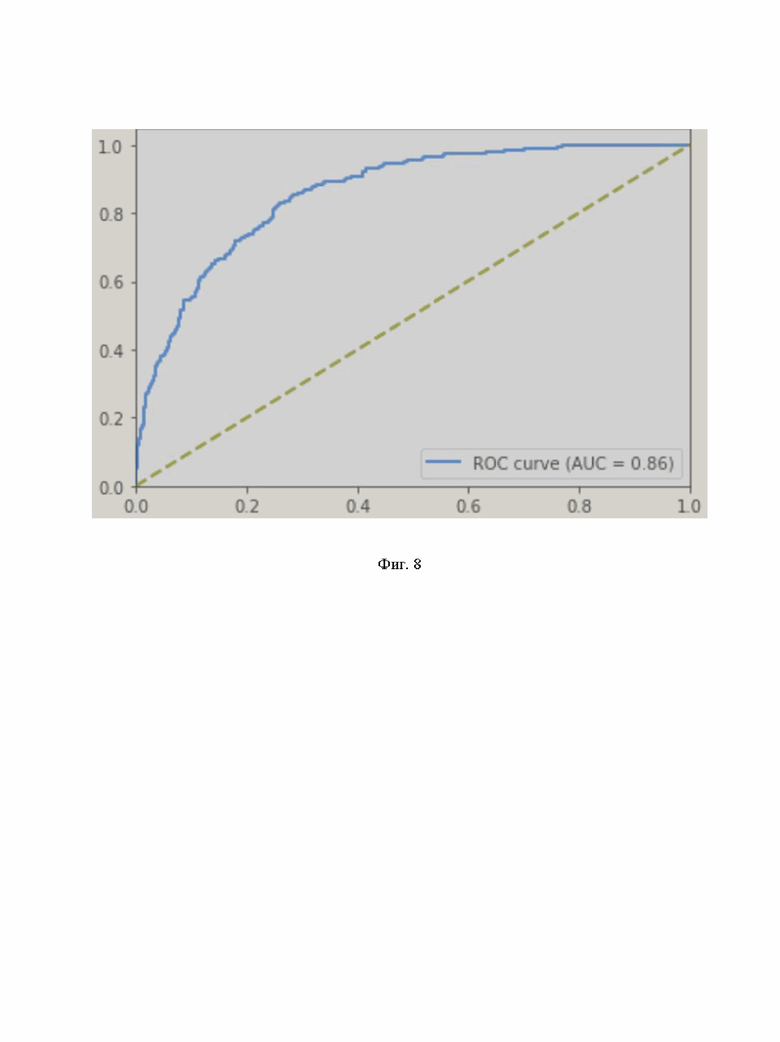
[0032] Фиг. 7 - Фиг. 8 иллюстрируют пример метрики качества второй модели машинного обучения для классификации убытков
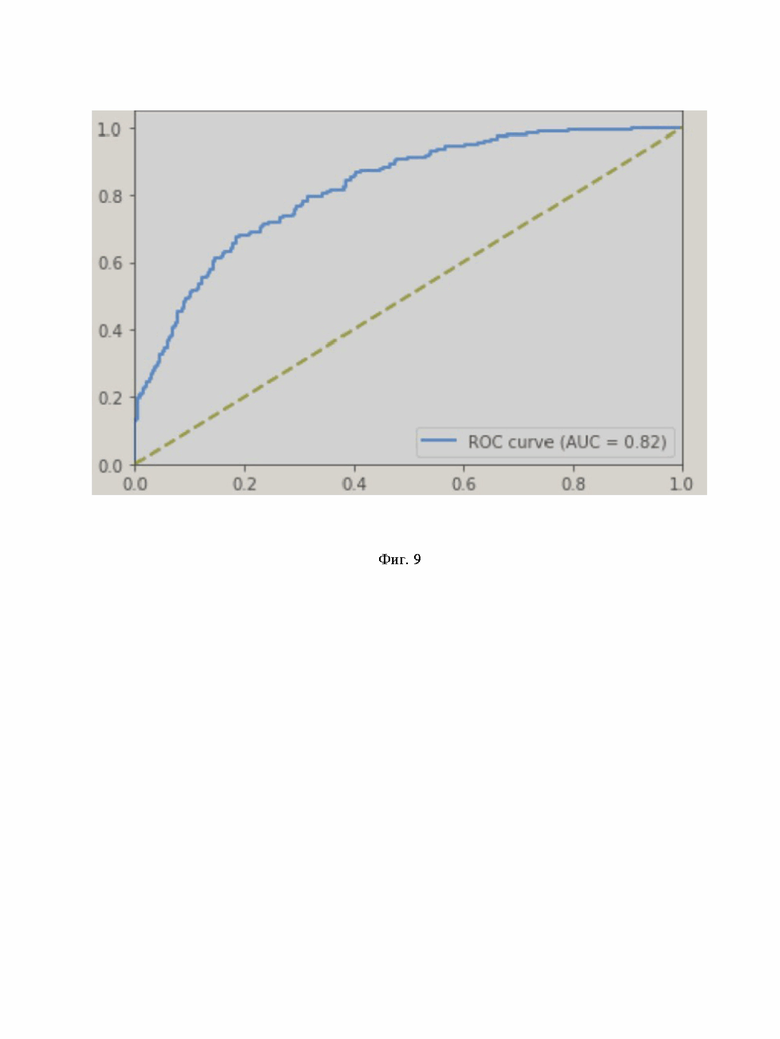
[0033] Фиг. 9 иллюстрирует пример метрики качества третьей модели машинного обучения для классификации степени повреждения деталей.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0034] Ниже будут описаны понятия и термины, необходимые для понимания данного технического решения.
[0035] Модель машинного обучения (ММО) - совокупность методов искусственного интеллекта, характерной чертой которых является не прямое решение задачи, а обучение в процессе применения решений множества сходных задач.
[0036] Данное техническое решение может быть реализовано на компьютере, в виде автоматизированной информационной системы (АИС), распределенной компьютерной системы, или машиночитаемого носителя, содержащего инструкции для выполнения вышеупомянутого способа с помощью вычислительных средств (например, процессора).
[0037] На Фиг. 1 представлена общая схема системы (100) автоматизированной классификации повреждений ТС (110), на котором установлено телематической устройство (120), обеспечивающее сбор данных о ТС (110) для их передачи на сервер (140) по беспроводному каналу передачи данных, который осуществляет последующую обработка данных получаемых с телематического устройства (120).
[0038] Телематическое устройство (120) в общем случае содержит акселерометр, антенну ГНСС (Глобальная навигационная спутниковая система), обеспечивающую связь со спутником (130), и средства беспроводной связи. Телематическое устройство (120) выполняет сбор телеметрических данных с ТС (110), например, скорость, ускорение, траекторию перемещения, гео-координаты, параметры ТС и т.п.
[0039] Дополнительно телематическое устройство (120) может содержать различного рода датчики и сенсоры, например: датчик температуры, датчик дыма, датчик давления, гироскоп и др. Телематическое устройство (120) может выполняться в виде единого блока, содержащего необходимые компоненты для реализации заданного назначения, или быть реализовано в виде группы устройств интернет вещей (IoT), связанных между собой пригодным протоколом обмена данных. Средство беспроводной связи телематического блока (120) может быть реализовано в виде модема (GSM/3G/4G/5G, спутниковая связь и т.п.) или Wi-Fi модуля.
[0040] На Фиг. 2 представлена блок-схема выполнения заявленного способа (200) классификации повреждений ТС (110) при ДТП. На первом этапе (201) телематическое устройство (120), установленное на ТС (110), выполняет сбор телеметрических данных, которые предшествовали моменту попадания в ДТП. Телематическое устройство (120), установленное на транспортное средство, может собирать различную информацию во время ДТП, которая может быть полезной для страховой компании, ГИБДД и водителя. Например, изменение скорости автомобиля перед аварией, координаты и время совершения ДТП. Кроме того, устройство (120) может собирать данные о пройденном расстоянии, времени движения, геолокации автомобиля, ускорениях, торможениях, поворотах, а также информацию о состоянии двигателя, тормозной системы, трансмиссии в момент ДТП, а также данные о силе удара, тип и количество активированных подушек безопасности и другие параметры в зависимости от конкретного оснащения и реализации телематического устройства (120).
[0041] Телеметрические данные, поступающие с устройства (120), агрегируются в пакеты данных для последующей передачи на сервер (140), который в последующем будет выполнять их анализ. Получение пакетов данных от телематического устройства (120) может быть осуществлено в любом порядке (FIFO/LIFO), в том числе с пробелами в данных, в случае если по какой-либо причине телематическое устройство (120) не в состоянии отправить на сервер (140) отдельный пакет данных.
[0042] На этапе (202) сервер (140) формирует на основании полученных данных массив данных, который далее на этапе (203) обрабатывается с помощью первой ММО для целей определения одного или нескольких ударов ТС (110). Определение удара осуществляется, как правило, на выявление аномалий (вероятных ударов) в показаниях акселерометра. Из данных выделяется, в частности, массив ускорений, массив гео-координат, массив скоростей и других параметров. На данном этапе используется модель детектирования аномалий, например такая как Spike Detection (см. https://learn.microsoft.com/en- us/dotnet/machine-learning/tutorials/sales-anomaly-detection). Данная модель не требует обучения. На Фиг. 6 показан пример выявления аномалий (вероятных ударов).
[0043] На этапе (204) выполняется определение конфигурации каждого удара ТС, выявленного в ходе выполнения этапа (203), а также типа убытка на основании полученного массива данных с телематического устройства (120). Выполнение этапа (204) реализовано с помощью второй ММО, обученной на выборке данных о конфигурациях ударов ТС, состоянии движения ТС и параметрах ТС.
[0044] В ходе работы второй ММО на этапе (204) производится бинарная классификация выявленных на этапе (203) аномалий в качестве ударов, либо ложных определений удара с заданным порогом достоверности. Конфигурация ударов включает по меньшей мере одно из: силу удара, направление удара относительно центра масс ТС, скорость ТС во время удара, направление движения ТС, параметры ТС. Параметр ТС (110), попавшего в ДТП, определяется по VIN-коду ТС (110), позволяющему точно установить марку и модель ТС, технические характеристики, комплектацию, массу и т.п.Эти параметры необходимы для четкого определения повреждений на основании получаемых телеметрических данных от телематического устройства (120).
[0045] На данном этапе используется ММО мульти-классовой классификации с градиентным бустингом, например такая как LightGBM. Для контроля качества модели используется метрика micro-average ROC-AUC. Модель производит классификацию убытка по классам (0 - предсказание не проводилось, 1 - не является убытком, не содержит удары, 2 - не является убытком, содержит удары, 3 - убыток при движении на малой скорости, 4 - убыток при движении через препятствие, 5 - убыток в движении, 6 - убыток на стоянке). Для осуществления данного этапа способа использовалась модель с метрикой больше 0.85. На Фиг. 7 и Фиг. 8 показана метрика качества второй ММО для классификации убытков.
[0046] На этапе (205) выполняется определение перечня поврежденных деталей с учетом скрытых повреждений по конфигурации детектированных ударов с помощью третьей ММО, обученной на выборке данных об убытках с учетом телематической информации при ДТП.
[0047] На Фиг. 3 представлен пример работы третьей ММО при обработке данных при ДТП ТС (110). На основании данных, обработанных на этапах (203)-(204), анализируется информация о повреждении (310), учитывая сопутствующие телеметрические параметры, на основании которых происходит определение конфигурации удара, а также повреждениях, свойственных типу конкретного ТС (110). Применяемая в рамках работы данного этапа ММО обучается в том числе на информации о конфигурации ТС, используя, например, информацию из каталогов и баз данных (AutoData, Cat-Car и др.). Это позволяет учитывать скрытые повреждения, на основании информации об узлах и деталях, установленных на конкретном ТС (110), для чего также применяется информация о VIN-номере ТС для точного и достоверного прогнозирования повреждений.
[0048] Как показано на Фиг. 3, при анализе поврежденных деталей (320) на основании обработки телеметрических данных, ММО определяется перечень деталей (321-324), которые были повреждены, а также степень их повреждения с учетом, например, силы и направления удара на основании параметров движения ТС (110). С учетом характера удара можно достаточно точно определить скрытые повреждения, на основании связанных узлов и элементов конструкции ТС (110) при ДТП, характерных для определенного типа повреждения конкретного ТС (110). Как показано на Фиг. 3, при фронтальном ударе ТС (110) с учетом характера движения ТС (110), повреждения (320) могут включать в себя связанные узлы, такие как: фары (321), радиатор (322), стабилизатор (323), рычаг (324) и другие связанные детали в зависимости от характера повреждения. Для каждой детали (320) также может определяться степень ее повреждения и необходимость ремонта или замены в зависимости от конкретного типа удара ТС (110).
[0049] Применяемая на этапе (205) ММО также обучается на датасете, формируемом из параметров повреждения конкретного типа ТС в различного рода ДТП, а также характеристиках движения ТС до момента ДТП, в частности, марка и модель ТС, VIN-номер ТС, скорость и направление ТС, сила удара, области повреждений, сопутствующий ущерб элементов кузова, внутренние повреждения и т.п. На данном этапе используется ММО классификации с градиентным бустингом например - LightGBM. ММО классифицирует степень повреждения деталей по классам (0 - предсказание не проводилось, 1 - повреждения нет, 2 - слабое повреждение, ремонт, 3 - умеренное повреждение, ремонт, 4 - сильное повреждение, замена). Для контроля качества модели используется метрика micro-average ROC-AUC. Для осуществления данного этапа способа использовалась модель с метрикой больше 0.8. На Фиг. 9 показана метрика качества третей ММО для классификации степени повреждения деталей.
[0050] В случае лобового удара, как правило, внешние повреждения достаточно просто подлежат идентификации, поскольку представляют внешние элементы кузова, которые явно испытали деформацию, однако, с учетом конкретного типа ТС ММО также может классифицировать степень повреждения как это показано на Фиг. 4. Конкретное повреждение (410) ТС (110 ) может анализироваться на предмет геометрии повреждения (410), в частности, параметров площади повреждения, глубины повреждения. Эти данные могут собираться с помощью датчиков, установленных на ТС (110) и связанных с телематическим устройством (120).
[0051] На этапе (206) по итогу обработки телеметрических данных группой ММО выполняется автоматическая классификация повреждения ТС (110) на основании определенного перечня поврежденных деталей (320). На данном этапе производится классификация повреждений ТС (110), выявление списка поврежденных деталей и ремонтных воздействий, формирующих номенклатурный перечень ремонтных воздействий для данного ТС. Данная информация может автоматически передаваться на сервер страховой компании для формирования выплат по причиненному ущербу.
[0052] Дополнительно, водитель ТС (110) или иной пользователь может производить фото или видеофиксацию ТС (110) при ДТП, которая также может передаваться на сервер (140) и дополнительно учитываться для классификации повреждений наряду с телеметрическими данными. По данным полученных изображений может производится их обработка для дополнительного определения характера повреждений, например, также с помощью модели машинного обучения.
[0053] Также, телематическое устройство (120) при его оснащении дополнительными датчиками и сенсорами, например, датчиком давления, может фиксировать критические события при ДТП, в частности, повреждение лобового стекла водителем и/или пассажиром. В таком случае может дополнительно происходить экстренное оповещение соответствующих служб, в частности спасения и скорой помощи. Информация, передаваемая на сервер или пульт таких служб содержит гео-координаты ТС и время фиксации события (ДТП). При наличии датчика дыма может фиксироваться задымление салона и передача экстренной информации пожарным службам.
[0054] На Фиг. 5 представлен общий пример вычислительного устройства (400), которое может представлять собой, например, компьютер, сервер, ноутбук, смартфон, SoC (System-on-a-Chip/Система на кристалле) и т.п. Устройство (400) может применяться для полной или частичной реализации заявленного решения, в частности, для частичной или полной реализации телематического устройства (120) и сервера (140), а также полностью или частично исполнять заявленный способ (200).
[0055] В общем случае устройство (400) содержит такие компоненты, как: один или более процессоров (401), по меньшей мере одну оперативную память (402), средство постоянного хранения данных (403), интерфейсы ввода/вывода (404) включая релейные выходы для соединения с контроллерами управления движения ленточного конвейера, средство В/В (405), средства сетевого взаимодействия (406).
[0056] Процессор (401) устройства выполняет основные вычислительные операции, необходимые для функционирования устройства (400) или функционала одного или более его компонентов. Процессор (401) исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти (402).
[0057] Память (402), как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал. Средство хранения данных (403) может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средство (403) позволяет выполнять долгосрочное хранение различного вида информации, например, запись магнитограмм, истории обработки запросов (логов), идентификаторов пользователей, данные камер, изображения и т.п.
[0058] Интерфейсы (404) представляют собой стандартные средства для подключения и работы с вычислительными устройствами. Интерфейсы (404) могут представлять, например, релейные соединения, USB, RS232/422/485 или другие, RJ45, LPT, UART, СОМ, HDMI, PS/2, Lightning, Fire Wire и т.п. для работы, в том числе, по протоколам Modbus и сетям Probfibus, Profinet или сетям иного типа. Выбор интерфейсов (404) зависит от конкретного исполнения устройства (400), которое может представлять собой, вычислительный блок (вычислительный модуль), например на базе ЦПУ (одного или нескольких процессоров), микроконтроллера и т.п., персональный компьютер, мейнфрейм, серверный кластер, тонкий клиент, смартфон, ноутбук и т.п., а также подключаемых сторонних устройств.
[0059] В качестве средств В/В данных (405) может использоваться: клавиатура, джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор мышь, трекбол, световое перо, динамики, микрофон и т.п.
[0060] Средства сетевого взаимодействия (406) выбираются из устройства, обеспечивающего сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем, и т.п. С помощью средства (406) обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM, квантовый (оптоволоконный) канал передачи данных, спутниковая связь и т.п. Компоненты устройства (400), как правило, сопряжены посредством общей шины передачи данных.
[0061] В настоящих материалах заявки было представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО ПОСТРОЕНИЯ МАРШРУТА НА ОСНОВАНИИ ТЕЛЕМАТИЧЕСКОГО СКОРИНГА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2023 |
|
RU2814789C1 |
| Система и способ создания правил | 2018 |
|
RU2725033C2 |
| СПОСОБ И СИСТЕМА ДЕТЕКТИРОВАНИЯ ТРЕВОЖНЫХ СОБЫТИЙ, ПРОИСХОДЯЩИХ НА ТРАНСПОРТНОМ СРЕДСТВЕ ВО ВРЕМЯ ПЕРЕВОЗКИ ГРУЗОВ, В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2748780C1 |
| Система и способ блокирования компьютерной атаки на транспортное средство | 2018 |
|
RU2706887C2 |
| СПОСОБ И КОГНИТИВНАЯ СИСТЕМА ВИДЕОАНАЛИЗА, МОНИТОРИНГА, КОНТРОЛЯ СОСТОЯНИЯ ВОДИТЕЛЯ И ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2018 |
|
RU2684484C1 |
| Система и способ защиты устройств пользователя | 2020 |
|
RU2770146C2 |
| Способ диагностики и мониторинга аномалий в кибер-физической системе | 2021 |
|
RU2784981C1 |
| Способ автоматизированного предрейсового технического осмотра транспортных средств | 2024 |
|
RU2838349C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТА С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2019 |
|
RU2700246C1 |
| Система и способ классификации писем электронной почты | 2024 |
|
RU2828611C1 |

Изобретение относится к способу и системе классификации повреждений транспортного средства с помощью алгоритмов машинного обучения. Технический результат заключается в повышении точности определения повреждения ТС. В решении получают данные телеметрии с телематического устройства, установленного на ТС; формируют на основании полученных данных массив данных; определяют по меньшей мере один удар ТС с помощью первой модели машинного обучения, обрабатывающей массив телематических данных, осуществляющей выявление аномалий в показаниях телематического устройства; определяют конфигурацию удара ТС и тип убытка на основании полученного массива данных с помощью второй модели машинного обучения, обученной на выборке данных о конфигурациях ударов ТС, состоянии движения ТС и параметрах ТС; определяют перечень поврежденных деталей с учетом скрытых повреждений по конфигурации детектированных ударов с помощью третьей модели машинного обучения, обученной на выборке данных об убытках с учетом телематической информации при ДТП; и классифицируют повреждения ТС на основании определенного перечня поврежденных деталей. 2 н. и 11 з.п. ф-лы, 9 ил.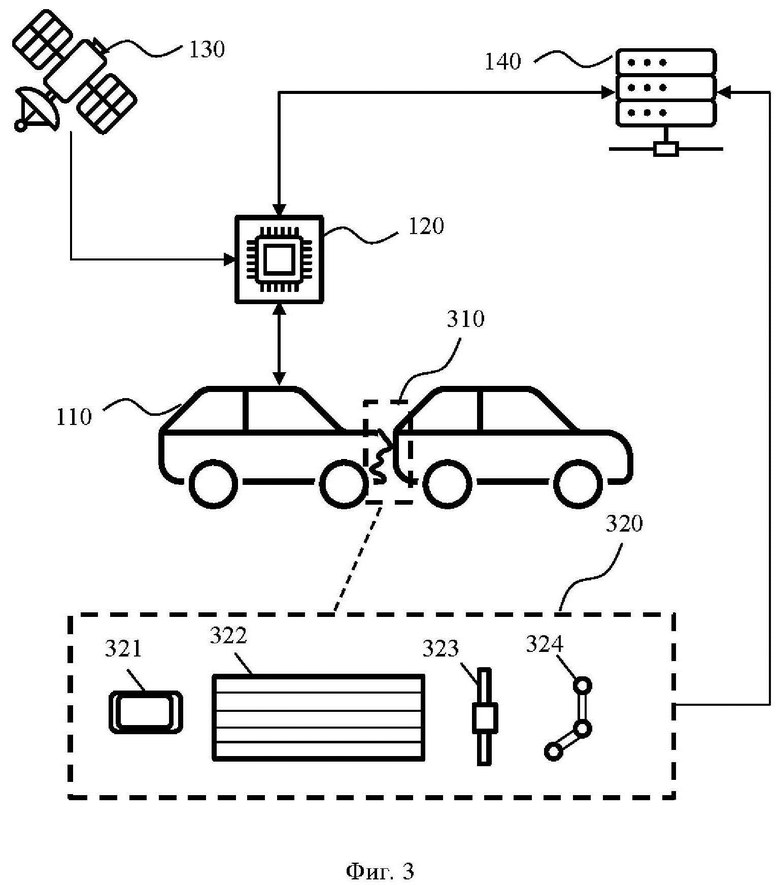
1. Компьютерно-реализуемый способ автоматизированной классификации повреждений транспортного средства (ТС) в результате дорожно-транспортного происшествия (ДТП), содержащий этапы, на которых:
получают данные телеметрии с телематического устройства, установленного на ТС;
формируют на основании полученных данных массив данных;
определяют по меньшей мере один удар ТС с помощью первой модели машинного обучения, обрабатывающей массив телематических данных, осуществляющей выявление аномалий в показаниях телематического устройства;
определяют конфигурацию удара ТС и тип убытка на основании полученного массива данных с помощью второй модели машинного обучения, обученной на выборке данных о конфигурациях ударов ТС, состоянии движения ТС и параметрах ТС;
определяют перечень поврежденных деталей с учетом скрытых повреждений по конфигурации детектированных ударов с помощью третьей модели машинного обучения, обученной на выборке данных об убытках с учетом телематической информации при ДТП, при этом определяется степень повреждения деталей на основании геометрии повреждения вследствие удара, включающей в себя параметры площади повреждения и глубину повреждения; и
классифицируют повреждения ТС на основании определенного перечня поврежденных деталей.
2. Способ по п. 1, характеризующийся тем, что конфигурация ударов включает по меньшей мере одно из: сила удара, направление удара относительно центра масс ТС, скорость ТС во время удара, направление движения ТС, параметры ТС.
3. Способ по п. 2, характеризующийся тем, что параметры ТС определяются по VIN-коду ТС.
4. Способ по п. 1, характеризующийся тем, что телематическое устройство содержит акселерометр, антенну ГНСС и средство беспроводной связи.
5. Способ по п. 4, характеризующийся тем, что телематическое устройство дополнительно содержит одно из: датчик температуры, датчик дыма, датчик давления, гироскоп.
6. Способ по п. 4, характеризующийся тем, что средство беспроводной связи выбирается из группы: модем или Wi-Fi модуль.
7. Способ по п. 1, характеризующийся тем, что телематическое устройство представляет собой группу устройств интернета вещей (IoT).
8. Система автоматизированной классификации повреждений ТС в результате ДТП, содержащая связанные между собой средствами беспроводной связи телематическое устройство, установленное на ТС, и сервер обработки данных, выполненный с возможностью:
получать массив телематических данных с телематического устройства, установленного на ТС;
определять по меньшей мере один удар ТС с помощью первой модели машинного обучения, обрабатывающей массив телематических данных, осуществляющей выявление аномалий в показаниях телематического устройства;
определять конфигурацию удара ТС на основании полученного массива данных с помощью второй модели машинного обучения, обученной на выборке данных о конфигурациях ударов ТС;
определять перечень поврежденных деталей с учетом скрытых повреждений по конфигурации детектированных ударов с помощью третьей модели машинного обучения, обученной на выборке данных об убытках с учетом телематической информации при ДТП, при этом определяется степень повреждения деталей на основании геометрии повреждения вследствие удара, включающей в себя параметры площади повреждения и глубину повреждения; и
классифицировать повреждения ТС на основании определенного перечня поврежденных деталей.
9. Система по п. 10, характеризующаяся тем, что конфигурация ударов включает по меньшей мере одно из: сила удара, направление удара относительно центра масс ТС, скорость ТС во время удара, направление движения ТС, параметры ТС.
10. Система по п. 11, характеризующаяся тем, что параметры ТС определяются по VIN-коду ТС.
11. Система по п. 10, характеризующаяся тем, что телематическое устройство содержит акселерометр, антенну ГНСС и средство беспроводной связи.
12. Система по п. 12, характеризующаяся тем, что телематическое устройство дополнительно содержит одно из: датчик температуры, датчик дыма, датчик давления, гироскоп.
13. Система по п. 13, характеризующаяся тем, что средство беспроводной связи выбирается из группы: модем или Wi-Fi модуль.
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 11367356 B1, 21.06.2022 | |||
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
