Изобретение относится к летательным аппаратам тяжелее воздуха с вертикальным взлетом и посадкой и может быть использовано в тех же целях, что и вертолет, но главным образом для осуществления технологических операций по переброске по воздуху более тяжелых и крупногабаритных грузов, особенно в условиях труднодоступной местности и бездорожья, а также при проведении спасательных работ и пожаротушении на высотных объектах, когда требуются большая грузоподъемность и маневренность летательного аппарата.
Известен летательный аппарат, содержащий кабину с посадочно-опорным механизмом, двигатель с взаимодействующими с воздушной средой лопастями и устройство управления (патент РФ 2033944, М.кл. В 64 С 39/00, 1995), который по своим характеристикам является прототипом предлагаемого изобретения.
В прототипе лопасти закреплены на осях, установленных с возможностью поворота в опорах на их краях. Опоры закреплены на радиальных стойках соединенного с двигателем центрального вала. Устройство управления выполнено в виде поворотного по углу и установленного соосно с центральным валом копира, на который опираются принудительно, например, с помощью пружин рычаги осей с лопастями. Центральный вал расположен симметрично относительно кабины по ее боковым сторонам и размещен горизонтально. Он выполнен единым для обеих боковых сторон и может быть установлен подвижно в горизонтальной плоскости вместе со своим двигателем.
Основными недостатками технического решения этого летательного аппарата являются: профиль копира устройства управления не обеспечивает существенную разность углов атаки лопастей и, следовательно, количеств отбрасываемого ими воздуха в противоположных половинах круга вращения центрального вала, что снижает КПД получения силы тяги лопастей; расположение лопастей в горизонтальной плоскости и необходимость поворота центрального вала вместе с двигателем внутри кабины, что увеличивает момент крена, а также взаимозависимость управляющих сил и моментов, усложняющая управление летательным аппаратом.
В основу предлагаемого изобретения поставлена задача: повысить КПД получения силы тяги лопастей, а также упростить управление летательным аппаратом путем изменения конструкции, условий и характера взаимодействия лопастей с воздушной средой.
Поставленная задача решается тем, что летательный аппарат, содержащий кабину с посадочно-опорным механизмом, двигатель, лопасти, установленные на осях, для взаимодействия с воздушной средой и устройство управления в отличие от прототипа снабжен дифференциалом с расположенными симметрично по бокам кабины полувалами. Каждая лопасть асимметрично закреплена на оси, на которой посажена коническая шестерня. На каждом полувалу свободно установлен передаточный элемент в виде втулки, имеющей на краях конические шестерни, входящие в зацепление с конической шестерней, закрепленной на оси лопасти. Каждый полувал имеет втулки, в которых установлены оси лопастей в два ряда симметрично по бокам кабины так, что каждая ось расположена радиально к полувалу. Устройство управления лопастями включает первую шестерню, соосно установленную на каждом полувалу, сдвоенную промежуточную шестерню, имеющую первую и вторую шестерни, установленные свободно на пальце первой шестерни, вторую шестерню, предназначенную для поворота направления вектора силы тяги лопастей, регулятор числа оборотов в виде тормоза для каждого полувала, синхронизирующий элемент в виде втулки, свободно установленной на полувалу и имеющей на одном краю шестерню, предназначенную для зацепления с конической шестерней на оси каждой из лопастей ближнего к кабине ряда, а на другом краю шестерню, предназначенную для зацепления со второй шестерней сдвоенной промежуточной шестерни, приводную шестерню, закрепленную жестко на полувалу с возможностью зацепления с первой шестерней сдвоенной промежуточной шестерни так, что передаточное отношение между приводной шестерней и конической шестерней на оси лопасти составляет 1:1.
Такое конструктивное решение по сравнению с прототипом позволяет: повысить КПД получения силы тяги лопастей за счет увеличения разности количеств отбрасываемого воздуха в противоположных половинах круга вращения полувала, упростить управление летательным аппаратом за счет уменьшения длины плеча момента крена и взаимозависимости управляющих сил и моментов путем размещения лопастей в вертикальной плоскости, устранения необходимости поворота центрального вала вместе со своим двигателем внутри кабины.
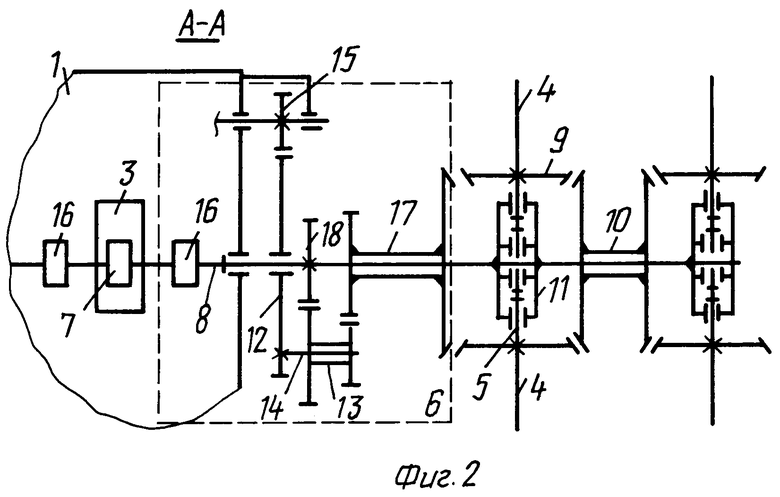
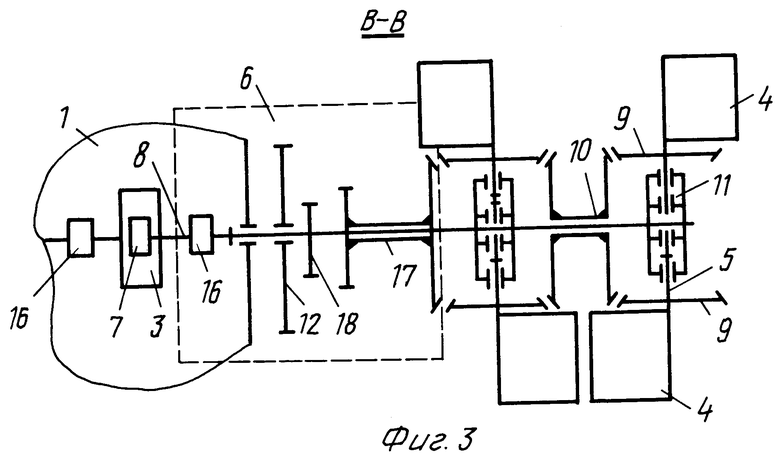
На фиг. 1 показан летательный аппарат с лопастями, размещенными на трех парах полувалов, расположенных по бокам кабины, вид сбоку; на фиг.2 - разрез по А-А на фиг.1; на фиг.3 - разрез по В-В на фиг.1.
Летательный аппарат содержит кабину 1 с опорно-посадочным механизмом 2 (показаны только выходы колес), двигатель 3, лопасти 4, установленные на осях 5 для взаимодействия с воздушной средой, и устройство 6 управления. Аппарат снабжен дифференциалом 7 с расположенными симметрично по бокам кабины 1 полувалами 8. Каждая лопасть 4 асимметрично закреплена на оси 5, на которой посажена коническая шестерня 9, на каждом полувалу 8 свободно установлен передаточный элемент 10 в виде втулки, имеющей на краях конические шестерни, входящие в зацепление с конической шестерней, закрепленной на оси 5 лопасти 4. Каждый полувал 8 имеет втулки 11, в которых установлены оси 5 лопастей 4 в два ряда симметрично по бокам кабины 1 так, что каждая ось 5 расположена радиально к полувалу 8. Устройство 6 управления лопастями 4 включает первую шестерню 12, соосно установленную на каждом полувалу 8, сдвоенную промежуточную шестерню 13, имеющую первую и вторую шестерни, установленные свободно на пальце 14 первой шестерни 12, вторую шестерню 15, предназначенную для поворота направления вектора силы тяги лопастей 4, регулятор числа оборотов в виде тормоза 16 для каждого полувала 8, синхронизирующий элемент 17 в виде втулки, свободно установленной на полувалу 8 и имеющей на одном краю шестерню, предназначенную для зацепления с конической шестерней 9 на оси 5 каждой из лопастей 4 ближнего к кабине ряда, на другом краю шестерню, предназначенную для зацепления со второй шестерней сдвоенной промежуточной шестерни 13, приводную шестерню 18, закрепленную жестко на полувалу 8 с возможностью зацепления с первой шестерней сдвоенной промежуточной шестерни 13 так, что передаточное отношение между приводной шестерней 18 и конической шестерней 9 на оси 5 лопасти 4 составляет 1:1.
Элементы 3, 7, 16 в разрезах на фиг.2 и 3 не показаны, т.к. они широко известны и не являются предметом изобретения, а соединения тормоза 16 и шестерни 15 с рычагами управления могут быть выполнены различными способами.
Работа летательного аппарата
После включения двигателя 3 вращение его вала передается через дифференциал 7 на полувал 8. Вместе с полувалом 8 лопасти 4 на своих осях 5 вращаются по кругу относительно продольной оси полувала 8. Пока шестерни 12 и 15 в процессе управления летательным аппаратом остаются неподвижными, приводная шестерня 18 вращает сдвоенную промежуточную шестерню 13 на ее оси 14. Вторая шестерня сдвоенной промежуточной шестерни 13 вращает синхронизирующий элемент 17 по ходу вращения полувала 8. Коническая шестерня синхронизирующего элемента 17 вращает коническую шестерню 9 оси 5 лопасти 4 ближнего к кабине 1 ряда. При этом коническая шестерня 9 дополнительно обегает по конической шестерне синхронизирующего элемента 17. Диаметры конической шестерни 9 и конической шестерни синхронизирующего элемента 17 различны. Поэтому передаточное отношение между приводной шестерней 18 и конической шестерней синхронизирующего элемента 17 выбрано таким, что результирующая угловая скорость вращения конической шестерни 9, а вместе с ней и оси 5 лопасти 4 во втулке 11 при совместном вращении с конической шестерней синхронизирующего элемента 17, равна угловой скорости вращения приводной шестерни 18. Т.е. передаточное отношение между приводной шестерней 18 и конической шестерней 9 оси 5 лопасти 4 составляет 1:1. Следовательно, их вращения синхронны. Передаточный элемент 10 одновременно вращает ось 5 с лопастью 4 другого ряда, но в противоположном направлении. В результате суммарный вектор скорости потока воздуха, отбрасываемого лопастями 4 двух смежных рядов, расположен в плоскости вращения полувала 8, проходящей через середину между рядами осей с лопастями.
Положение лопастей 4, размещенных на фиг.1 вертикально и горизонтально, показано соответственно на фиг.2 и 3. На фиг.2 вертикально расположенные лопасти 4 повернуты ребром к набегающему потоку воздуха (набегающий поток воздуха направлен против направления вращения полувала 8) и площадь их взаимодействия с воздушной средой равна нулю. В этом положении лопасти 4 воздух не отбрасывают. В ходе дальнейшего вращения полувала 8 устройство 6 управления синхронно поворачивает лопасти 4 плоскостями к набегающему потоку воздуха и в горизонтальном положении, как на фиг.3, площадь их взаимодействия с воздушной средой достигнет величины, равной удвоенной площади одной лопасти 4, а затем будет уменьшаться снова до нуля. Но в одной половине круга вращения полувала 8 лопасти 4 поворачиваются плоскостями навстречу набегающему потоку воздуха, а в противоположной половине - по ходу набегающего потока воздуха. Величина суммарного вектора угловой скорости вращения  лопастей 4 относительно воздушной среды в одной половине круга вращения полувала 8 (рабочей) составит сумму векторов угловых скоростей вращения полувала 8 (
лопастей 4 относительно воздушной среды в одной половине круга вращения полувала 8 (рабочей) составит сумму векторов угловых скоростей вращения полувала 8 ( ) и угловой скорости вращения лопастей 4 (
) и угловой скорости вращения лопастей 4 ( ), обусловленной вращением их осей 5 во втулках 11 на полувале 8, а в противоположной - их разность, т.е. соответственно можно записать:
), обусловленной вращением их осей 5 во втулках 11 на полувале 8, а в противоположной - их разность, т.е. соответственно можно записать:  но т.к.
но т.к.  то разность величин этих векторов составит:
то разность величин этих векторов составит:  Следовательно, в одной половине круга вращения полувала 8 лопасти 4 относительно воздуха вращаются в два раза быстрее, чем в противоположной, т.е. соотношение этих скоростей равно 1:2. Таким образом, количество воздуха, отбрасываемого лопастями в противоположных половинах круга вращения полувала 8, разное, что и создает силу тяги лопастей 4. Рычаг управления в кабине пилота необходимо поворачивает шестерню 15, которая соответственно смещает по углу шестерню 12. В это время первая шестерня сдвоенной промежуточной шестерни 13 на своей оси 14 обегает по приводной шестерне 18 и получает дополнительное вращение, которое, суммируясь с вращением приводной шестерни 18, дополнительно поворачивает синхронизирующий элемент 17 и соответственно через него коническую шестерню 9 оси 5 каждой лопасти 4 ближнего к кабине 1 ряда. Передаточный элемент 10 также поворачивает каждую шестерню 9 оси 5 каждой лопасти 4 смежного ряда, но в противоположном направлении. При этом "рабочая" половина круга вращения полувала 8 получает дополнительный поворот на необходимый угол и вектор силы тяги лопастей 4 занимает необходимое при взлете, в ходе полета и при посадке положение. Попеременное включение в работу тормозов 16, соединенных с рычагом управления в кабине пилота, вызовет соответствующее перераспределение числа оборотов полувалов 8 по бокам кабины 1 и, следовательно, требуемое перераспределение сил тяги лопастей 4, необходимое для управления креном летательного аппарата. Причем расположение осей 5 лопастей 4 в вертикальной плоскости сокращает длину плеча момента крена, что способствует повышению поперечной устойчивости летательного аппарата при внезапных и резких изменениях интенсивности вертикальных и боковых потоков воздушных масс. Лопасти 4 могут быть выполнены, например, в виде плоских пластин прямоугольной формы.
Следовательно, в одной половине круга вращения полувала 8 лопасти 4 относительно воздуха вращаются в два раза быстрее, чем в противоположной, т.е. соотношение этих скоростей равно 1:2. Таким образом, количество воздуха, отбрасываемого лопастями в противоположных половинах круга вращения полувала 8, разное, что и создает силу тяги лопастей 4. Рычаг управления в кабине пилота необходимо поворачивает шестерню 15, которая соответственно смещает по углу шестерню 12. В это время первая шестерня сдвоенной промежуточной шестерни 13 на своей оси 14 обегает по приводной шестерне 18 и получает дополнительное вращение, которое, суммируясь с вращением приводной шестерни 18, дополнительно поворачивает синхронизирующий элемент 17 и соответственно через него коническую шестерню 9 оси 5 каждой лопасти 4 ближнего к кабине 1 ряда. Передаточный элемент 10 также поворачивает каждую шестерню 9 оси 5 каждой лопасти 4 смежного ряда, но в противоположном направлении. При этом "рабочая" половина круга вращения полувала 8 получает дополнительный поворот на необходимый угол и вектор силы тяги лопастей 4 занимает необходимое при взлете, в ходе полета и при посадке положение. Попеременное включение в работу тормозов 16, соединенных с рычагом управления в кабине пилота, вызовет соответствующее перераспределение числа оборотов полувалов 8 по бокам кабины 1 и, следовательно, требуемое перераспределение сил тяги лопастей 4, необходимое для управления креном летательного аппарата. Причем расположение осей 5 лопастей 4 в вертикальной плоскости сокращает длину плеча момента крена, что способствует повышению поперечной устойчивости летательного аппарата при внезапных и резких изменениях интенсивности вертикальных и боковых потоков воздушных масс. Лопасти 4 могут быть выполнены, например, в виде плоских пластин прямоугольной формы.
При оснащении летательного аппарата лопастями 4, установленными на трех парах полувалов, как показано на фиг.1 (вариант), можно обеспечить снижение взаимозависимости управляющих сил и моментов по курсу, тангажу и крену, что упрощает управление летательным аппаратом в полете. Наращивание грузоподъемности аппарата, в частности, может быть достигнуто увеличением числа пар полувалов с лопастями, устанавливаемых по бокам вдоль кабины 1.
Величина силы тяги (Т) ориентировочно может быть определена по формуле:
T = NmVη, (1)
где N - число полувалов;
m - масса отбрасываемого воздуха лопастями полувала в единицу времени;
V - средняя скорость отбрасываемого воздуха в направлении центробежной силы;
η - КПД получения силы тяги лопастей.
Лопасти 4 наибольшим образом будут повернуты своими плоскостями к набегающему потоку воздуха в секторе круга вращения полувала 8, равном примерно 90o, т.е. в его четверти. Фиксируя эти положения лопастей, можно написать:
где ρ - плотность воздуха;
R и b - длина и ширина лопасти;
n - число оборотов полувала в единицу времени;
z - число лопастей в одном ряду.
Среднюю скорость воздуха в направлении центробежной силы выразим в соответствии с известной из механики зависимостью для скорости при равноускоренном движении:
С учетом (2) и (3), будем иметь: T = Nzρπ2R3bn2η, (4)
Из этого выражения видно, что сила тяги (Т) прямо пропорциональна квадрату числа оборотов полувала 8 в единицу времени. Учитывая, что числа оборотов в единицу времени соответствуют угловым скоростям вращения лопастей 4 относительно воздушной среды, которые в противоположных половинах круга вращения относятся как 1:2, силы тяги в них будут относиться как 1:4. Следовательно, величина КПД получения силы тяги лопастей будет равна 0,75. Но, учитывая сложность аэродинамических процессов, для каждого варианта конструкции летательного аппарата эту величину можно определить только экспериментально.
В качестве примера, умышленно занижая значение КПД и принимая для летательного аппарата на фиг.1:
N= 6, z=4, ρ = 1,2 кг/м3, R=2 м, b=0,2 м, n=20 1/сек, η=0,3, по формуле (4), получим: T≈55296 кгс.
Этот результат и вышеизложенное подтверждают выполнение задачи, поставленной в основу изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОР С РАЗДЕЛЕНИЕМ КРУТЯЩЕГО МОМЕНТА ДЛЯ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С СИСТЕМОЙ ПОСТУПАТЕЛЬНОЙ ТЯГИ | 2006 |
|
RU2359875C1 |
| Трансмиссия мотоблока | 2023 |
|
RU2821990C1 |
| Трансмиссия мотокультиватора | 2023 |
|
RU2814601C1 |
| Трансмиссия мотокультиватора | 2023 |
|
RU2821040C1 |
| Трансмиссия мотокультиватора | 2023 |
|
RU2816216C1 |
| Трансмиссия мотокультиватора | 2023 |
|
RU2816217C1 |
| Трансмиссия мотоблока | 2023 |
|
RU2816218C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2159726C1 |
| Силовая передача мотокультиватора | 2023 |
|
RU2814605C1 |
| Трансмиссия мотокультиватора | 2023 |
|
RU2814606C1 |
Изобретение относится к авиационной технике, а именно к летательным аппаратам тяжелее воздуха с вертикальным взлетом и посадкой. Аппарат содержит кабину с опорно-посадочным механизмом, двигатель, лопасти, установленные на осях для взаимодействия с воздушной средой, и устройство управления. Новым является то, что аппарат снабжен дифференциалом с расположенными симметрично по бокам кабины полувалами, а каждая лопасть асимметрично закреплена на оси, на которой посажена коническая шестерня. На каждом полувалу свободно установлен передаточный элемент в виде втулки, имеющей на краях конические шестерни, входящие в зацепление с конической шестерней, закрепленной на оси лопасти. Каждый полувал имеет втулки, в которых установлены оси лопастей в два ряда симметрично по бокам кабины так, что каждая ось расположена радиально к полувалу. Устройство управления лопастями расположено на каждом полувалу и включает шестерню, установленную на полувалу соосно с ним и входящую в зацепление с шестерней, предназначенной для поворота направления вектора силы тяги лопастей, сдвоенную промежуточную шестерню, установленную свободно на пальце первой шестерни, регулятор числа оборотов в виде тормоза для каждого полувала, синхронизирующий элемент в виде втулки, свободно установленной на полувалу и имеющей на одном краю шестерню, предназначенную для зацепления с конической шестерней на оси каждой из лопастей ближнего к кабине ряда, а на другом краю - шестерню, предназначенную для зацепления со второй шестерней сдвоенной промежуточной шестерни, приводную шестерню, закрепленную жестко на полувалу с возможностью зацепления с первой шестерней сдвоенной промежуточной шестерни так, что передаточное отношение между приводной шестерней и конической шестерней на оси лопасти составляет 1:1. Изобретение направлено на уменьшение взаимозависимости управляющих сил и моментов, что облегчает управление летательным аппаратом. 3 ил.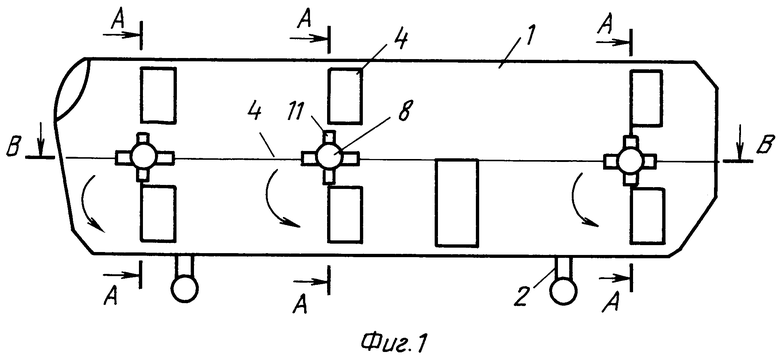
Летательный аппарат, содержащий кабину с опорно-посадочным механизмом, двигатель, лопасти, установленные на осях для взаимодействия с воздушной средой, и устройство управления, отличающийся тем, что он снабжен дифференциалом с расположенными симметрично по бокам кабины полувалами, каждая лопасть асимметрично закреплена на оси, на которой посажена коническая шестерня, на каждом полувалу свободно установлен передаточный элемент в виде втулки, имеющей на краях конические шестерни, входящие в зацепление с конической шестерней, закрепленной на оси лопасти, каждый полувал имеет втулки, в которых установлены оси лопастей в два ряда симметрично по бокам кабины так, что каждая ось расположена радиально к полувалу, устройство управления лопастями включает первую шестерню, соосно установленную на каждом полувалу, сдвоенную промежуточную шестерню, имеющую первую и вторую шестерни, установленные свободно на пальце первой шестерни, вторую шестерню, предназначенную для поворота направления вектора силы тяги лопастей, регулятор числа оборотов в виде тормоза для каждого полувала, синхронизирующий элемент в виде втулки, свободно установленной на полувалу и имеющей на одном краю шестерню, предназначенную для зацепления с конической шестерней на оси каждой из лопастей ближнего к кабине ряда, а на другом краю шестерню, предназначенную для зацепления со второй шестерней сдвоенной промежуточной шестерни, приводную шестерню, закрепленную жестко на полувалу с возможностью зацепления с первой шестерней сдвоенной промежуточной шестерни так, что передаточное отношение между приводной шестерней и конической шестерней на оси лопасти составляет 1:1.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1992 |
|
RU2033944C1 |
| СПОСОБ ДВИЖЕНИЯ НЕСУЩЕЙ ПОВЕРХНОСТИ В ТЕКУЧЕЙ СРЕДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ "МУХА" И "ВЕЕР") | 1998 |
|
RU2147545C1 |
| US 5265827 А, 30.11.1993 | |||
| СПОСОБ ПЕРЕРАБОТКИ ОРГАНИЧЕСКИХ ОТХОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2408649C2 |

