Изобретение относится к области воздухоплавания, а именно к конструкции летательного аппарата тяжелее воздуха, подъемная сила в котором обеспечивается за счет движения аэродинамических поверхностей. В частности, изобретение относится к летательным аппаратам вертикального взлета и посадки.
Известен летательный аппарат тяжелее воздуха, содержащий фюзеляж, приводной от силовой установки механизм, имеющий горизонтально расположенные поперек продольной оси фюзеляжа приводные валы, с которыми кинематически связаны лопасти, располагаемые при вращении в плоскости с постоянной угловой скоростью вокруг осей указанных валов с положительным углом атаки каждой лопасти навстречу движению (US, 5265827, B 64 C 29/00, 244-20, опубл. 30.11.93).
В данном летательном аппарате подъемная сила формируется за счет вращения лопастей с постоянной угловой скоростью вокруг горизонтальной оси.
Недостатками данного летательного аппарата являются то, что лопасти совершают вращение в одной плоскости и поэтому вращаются в спутной струе, отчего эффект создания подъемной силы ухудшается, а так же то, что управление положением лопастей по углу атаки осуществляется микропроцессором, что существенно усложняет конструкцию самого летательного аппарата.
Настоящее изобретение направлено на решение технической задачи по усовершенствованию механизма создания подъемной силы. Достигаемый при этом технический результат заключается в повышении эксплуатационной эффективности и надежности летательного аппарата.
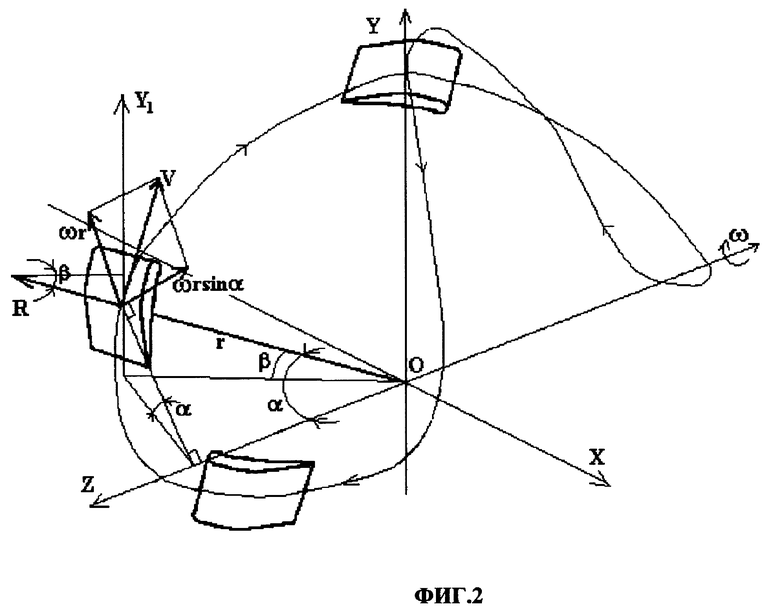
Указанный технический результат достигается тем, что в летательном аппарате тяжелее воздуха, содержащем фюзеляж, приводной от силовой установки механизм, имеющий по каждому борту горизонтально расположенный поперек продольной оси фюзеляжа приводной вал, с каждым из которых кинематически посредством тяг связаны лопасти, выполненные с возможностью вращения в плоскости с постоянной угловой скоростью вокруг оси приводного вала с положительным углом атаки каждой лопасти, отличающийся тем, что для обеспечения вращения каждой лопасти по схеме движения, представленной на фиг. 2, приводной механизм выполнен с функцией дополнительного вращения указанных лопастей с такой же угловой скоростью вокруг перпендикулярной к оси приводного вала неподвижной оси, расположенной в вышеуказанной плоскости вращения лопастей, при этом каждый приводной вал представляет собой крестовину, а приводной механизм представляет собой выполненный в корпусе конический редуктор.
При этом бочковые шестерни конического редуктора установлены с возможностью вращения на осях крестовины, при этом центральная шестерня зафиксирована неподвижно в опоре для корпуса, корпус установлен относительно указанной опоры с возможностью вращения, а боковые шестерни выполнены с возможностью вращения относительно корпуса, с каждой боковой шестерней связана по крайней мере одна тяга, ось которой перпендикулярна оси этой шестерни и на концах которой закреплены указанные лопасти таким образом, чтобы при вращении каждая лопасть занимала соответствующее положение по потоку навстречу движения.
При этом каждая тяга установлена с возможностью поворота вокруг своей оси на угол ±45o.
При этом в ступице каждой боковой шестерни выполнены боковые отверстия, через которые пропущена указанная тяга, несущая лопасти.
При этом возможность поворота каждой тяги вокруг своей оси обеспечивается снабжением тяги на участке ее расположения в ступице боковой шестерни копиром, контактная часть которого введена в контакт с рабочей профильной поверхностью кулачка, выполненной в торце крестовины, на которой расположена с возможностью вращения боковая шестерня.
При использовании такого способа создания подъемной силы, например, летательного аппарата, траектория перемещения лопасти такова, что каждый раз в момент создания максимальной подъемной силы лопасть находится в невозмущенном потоке. Скорость перемещения лопасти максимальна в момент создания максимальной подъемной силы (верхнее положение лопасти) и уменьшается в  раза, когда лопасть находится в плоскости XOZ, поэтому в эти моменты сила сопротивления движению уменьшается в
раза, когда лопасть находится в плоскости XOZ, поэтому в эти моменты сила сопротивления движению уменьшается в  раза. Таким образом, предложенный способ кроме того, что прост в изготовлении еще и эффективнее почти в 1,5 раза.
раза. Таким образом, предложенный способ кроме того, что прост в изготовлении еще и эффективнее почти в 1,5 раза.
Настоящее изобретение поясняется конкретным примером, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения приведенной совокупностью признаков требуемого технического результата.
На фиг. 1 представлен общий вид летательного аппарата, первый пример исполнения;
на фиг. 2 представлена схема движения лопасти;
на фиг. 3 - вид по оси ОХ на траекторию движения лопасти;
на фиг. 4 - вид по оси OZ на траекторию движения лопасти;
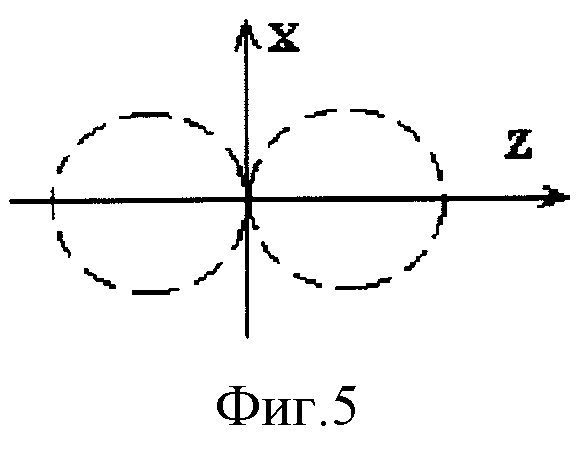
на фиг. 5 - вид по оси OY на траекторию движения лопасти;
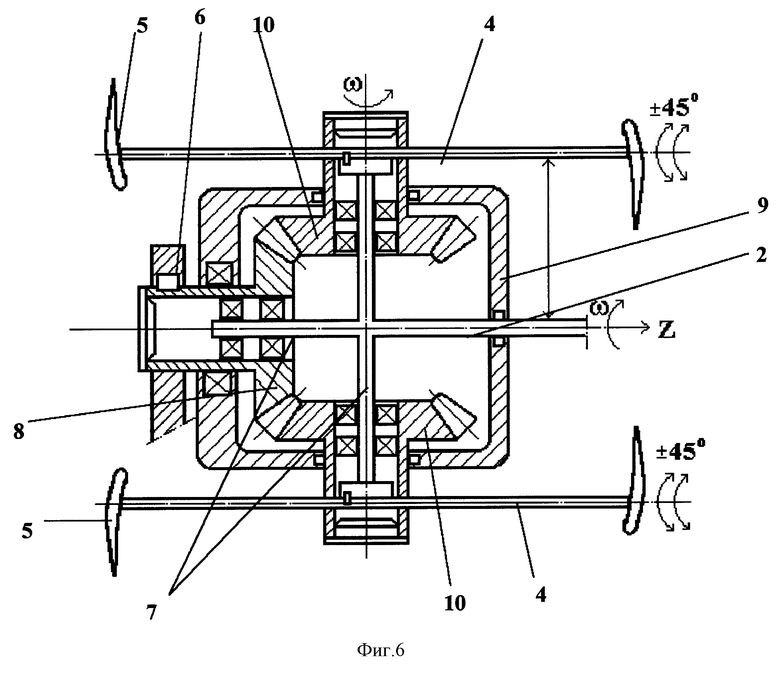
на фиг. 6 - продольный разрез приводного механизма;
на фиг. 7 - узел связи тяги с боковой шестерней и приводным валом для летательного аппарата, первый пример исполнения;
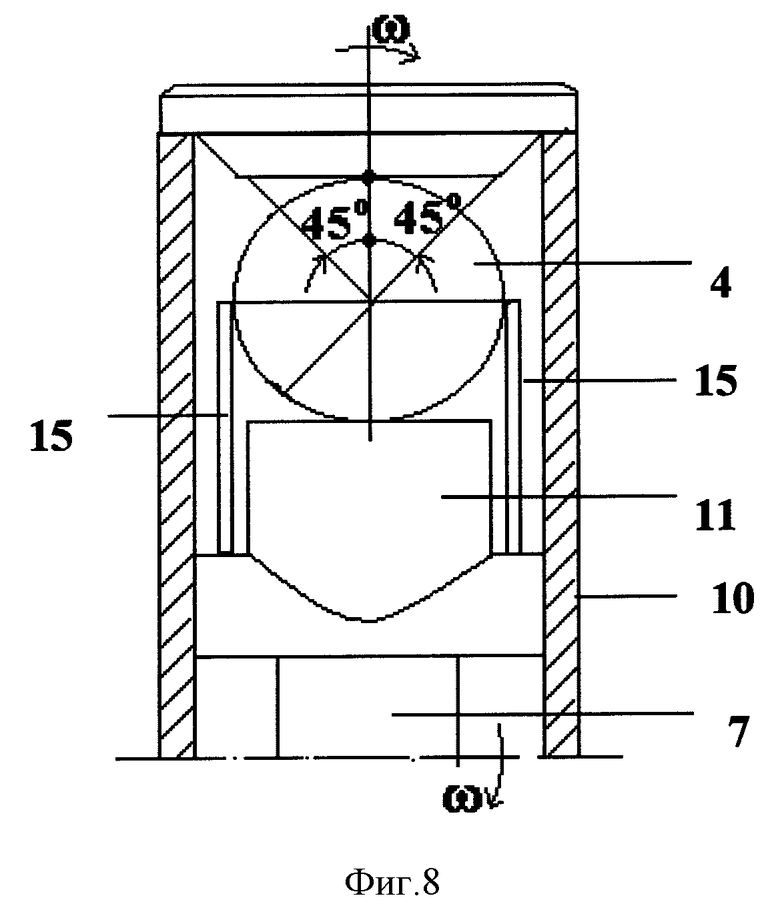
на фиг. 8 - узел связи тяги с боковой шестерней и приводным валом для летательного аппарата, второй пример исполнения;
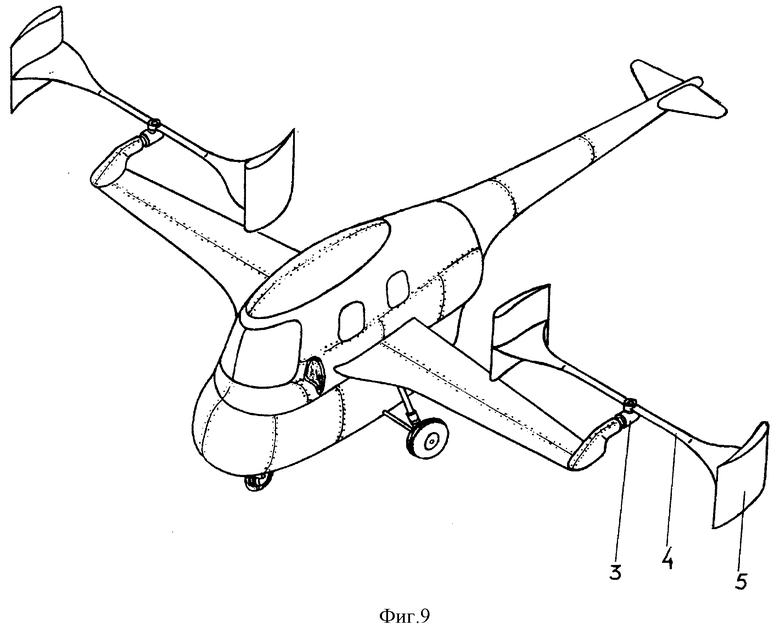
на фиг. 9 - общий вид летательного аппарата, второй пример исполнения;
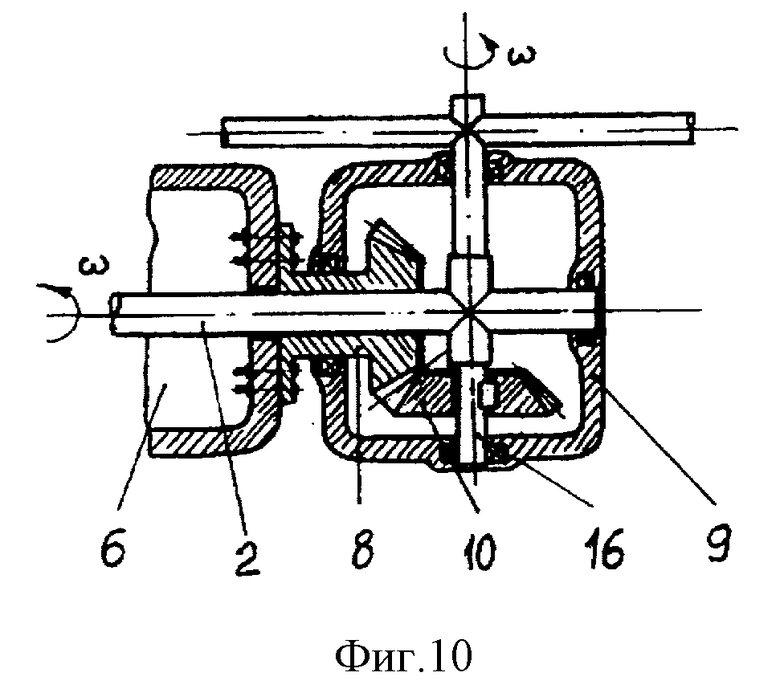
на фиг. 10 - узел связи тяги с боковой шестерней и приводным валом для летательного аппарата по второму примеру исполнения.
Летательный аппарат, например, вертикального взлета и посадки типа вертолета (фиг. 1) по первому примеру исполнения содержит фюзеляж 1 заданной конструкции, перпендикулярно продольной оси которого расположены приводные валы 2 по одному с каждого борта. Указанные приводные валы получают вращение от силовой установки (не показана), располагаемой либо внутри фюзеляжа, либо снаружи него в зависимости от типа и схемы построения летательного аппарата. На свободном конце каждого приводного вала 2 смонтирован в виде отдельного узла приводной механизм 3, посредством которого приводной вал связан с тягами 4, на концах которых закреплены лопасти 5. С каждого борта летательного аппарата с приводным валом связаны по две крестообразно расположенных тяги. Каждый приводной механизм закреплен соответствующим образом на опоре 6, фиксируемой на фюзеляже летательного аппарата. При этом лопасти, закрепленные на концах каждой тяги противоположно расположены по отношению друг к другу.
Для летательного аппарата с крестообразно расположенными тягами указанный приводной механизм, элементы которого получают вращение от приводного вала, обеспечивает вращение лопастей по траектории лемнискаты (траектория в виде объемной восьмерки), обеспечивающее получение подъемной силы. Согласно настоящего изобретения реализуется способ создания подъемной силы, заключающийся во вращении лопасти в плоскости с постоянной угловой скоростью вокруг оси и дополнительном вращении с такой же угловой скоростью вокруг перпендикулярной к ней неподвижной горизонтальной оси, расположенной в указанной плоскости. При этом обеспечивают при вращении лопасти положительный угол атаки лопасти навстречу движению.
На фиг. 2 представлена схема движения лопасти 5. Лопасть 5 вращается с угловой скоростью ω вокруг оси (относительное движение), которая сама вращается в плоскости YOZ с такой же угловой скоростью вокруг перпендикулярной к ней неподвижной горизонтальной оси, совпадающей с осью ОХ (переносное движение).
В результате этих вращений лопасть 5 движется по траектории, представляющей объемную восьмерку (лемнискату), и будет находиться постоянно над плоскостью XOZ. На фиг. 3-5 показаны проекции лемнискаты на координатные плоскости.
Одновременно с вращениями лопасти вокруг двух осей она будет проворачиваться вокруг оси, связывающей центр лопасти с центром вращения так, чтобы положительный угол атаки лопасти был направлен навстречу движению и возникающая аэродинамическая сила R была направлена от центра вращения к лопасти. При этом регулирующая составляющая аэродинамической силы проинтегрированная за один полный оборот вокруг оси ОХ будет направлена вертикально вверх.
Скорость перемещения лопасти максимальна в верхнем положении лопасти, когда складываются скорости относительного и переносного движений и создаваемая подъемная сила максимальна; при нахождении плоскости вращения лопасти в горизонтальном положении скорость переносного движения становится нулевой, соответственно скорость перемещения лопасти, подъемная сила и сила сопротивления уменьшаются в  раза.
раза.
Вычислим величину усредненной подъемной силы, возникающей при движении лопасти:
Y = Rsinβ, где sinβ = sin2α,
а R - аэродинамическая сила, зависящая от α: углы, приведенные на фиг. 1;
углы, приведенные на фиг. 1;
cy - коэффициент подъемной силы,
S - площадь несущей поверхности лопасти,
p - плотность воздуха,
v(α) - скорость движения лопасти
v2(α) = ω2r2+ω2r2sin2α = ω2r2(1+sin2α),
тогда Y(α) = cypω2r2(1+sin2α)Ssin2α/2,
усредним ее за один период обращения лопасти
Аналогично подъемной силе рассчитываем силу лобового сопротивления Q(α) = cxpω2r2(1+sin2α)S/2,
где cx - коэффициент лобового сопротивления, а усредненная сила сопротивления будет
Сравнение с аналогичными параметрами вертолета показывает, что использование принципа движения лопасти по лемнискате при создании такой же подъемной силы создает силу сопротивления в результате маховых движений примерно на 30% ниже.
Благодаря такому способу создания подъемной силы повышается эффективность и надежность создания подъемной силы, например, летательного аппарата типа вертолет.
Каждый приводной вал 2 (фиг. 6) выполнен со стороны конца, располагаемого вне фюзеляжа (то есть снаружи него), в виде крестовины с тремя взаимно перпендикулярными осями 7, на которых на подшипниках расположены конические шестерни приводного механизма. На центральной оси крестовины расположена центральная коническая шестерня 8, ступица которой, установленная на подшипниках в корпусе 9 приводного механизма, зафиксирована от проворота и осевого смещения в опоре 6. Таким образом, приводной вал может вращаться внутри этой шестерни, а корпус приводного механизма может вращаться относительно центральной шестерни. В корпусе 9 с возможностью свободного вращения относительно последнего расположены боковые конические шестерни 10, ступицы которых выведены за пределы корпуса наружу. Указанные боковые шестерни оппозитно расположены относительно друг друга и зацеплены с центральной шестерней 8 с обеспечением равного передаточного отношения в зацеплениях шестерен, величина которого определяется из условия, что угловая скорость вращения приводного вала равна угловой скорости вращения каждой боковой шестерни.
В ступицах боковых шестерен 10 выполнены сквозные отверстия, через которые пропущена по крайней мере одна тяга 4, несущая на своих концах лопасти 5. При этом лопасти расположены противоположно друг другу с тем, чтобы при вращении всякий раз каждая лопасть занимала соответствующее положение по потоку навстречу движения. При этом ось тяги перпендикулярна оси боковой шестерни.
Каждая тяга, кроме того, что она совершает вращательное движение с угловой скоростью вращения боковой шестерни, имеет возможность вращения на угол ±45o вокруг своей оси. Угловое перемещение от -45o до +45o тяги вокруг своей оси необходимо для того, чтобы при движении лопасти по траектории лемнискаты обеспечить положительный угол атаки лопасти навстречу движению (см. фиг. 2).
На фиг. 7 и 8 показаны два примера выполнения кинематической связи тяги с боковой шестерней и осью крестовины, обеспечивающей при вращении тяги в своей плоскости так же и поворот тяги на угол ±45o вокруг своей оси. В общем случае эта функция реализуется тем, что тяга оснащается копиром в виде штыря или выступа или поводка и т.д., контактная часть которого взаимодействует с профильной рабочей поверхностью кулачка, профиль которой и задает траекторию поворота тяги. Ниже приведены два конкретных примера реализации.
Ось 7 крестовины приводного вала 2 имеет на своем конце, введенном в полость ступицы боковой шестерни 10, кулачковый механизм, включающий в себя непосредственно кулачок 11 с профильной рабочей поверхностью в виде канавки 12 (фиг. 7). С тягой связан поводок 13, имеющий ролик 14, уложенный в канавку 12. Профиль канавки или ее траектория вокруг кулачка спроектированы так, что при относительном вращении боковой шестерни с угловой скоростью ω обеспечивается вращение тяги, при этом по отношению к боковой шестерне кулачок неподвижен. Следовательно, происходит перемещение ролика 14 по профильной канавке. А это приводит к тому, что тяга совершает угловые повороты в одну и другую сторону. В связи с тем, что траектория лемнискаты определяет необходимость поворота лопасти на угол ±45o, чтобы обеспечить правильное положение лопасти по углу атаки, то, естественно профиль канавки должен быть спроектирован в соответствии с итоговой задачей по перемещению точки "a" в именно этом угловом диапазоне.
На фиг. 8 показано другое решение по выполнению кулачка. Профильная рабочая поверхность этого кулачка выполнена в виде кольцевого выступа, на который опираются штыри 15. Штыри расположены по одному с каждой стороны тяги, как это показано на фиг. 8. При вращении боковой шестерни штыри скользят по выступу. При этом подъемы и впадины поверхности выступа выполнены так, что при подъеме одного штыря другой утопает во впадине. Такое исполнение позволяет при вращении тяги с боковой шестерней одновременно совершать угловые перемещения вокруг своей оси на заданный угол ±45o.
Приведенные на фиг. 7 и 8 примеры исполнения устройств, обеспечивающих поворот тяги при ее вращении на угол +45o, не являются единственными. Они приведены только для иллюстрации возможности решения этой задачи. Возможны и другие исполнения.
Летательный аппарат вертикального взлета и посадки типа вертолета (фиг. 9) по второму примеру исполнения принципиально повторяет конструкцию аппарата по первому примеру исполнения. Он также содержит фюзеляж 1 заданной конструкции, перпендикулярно продольной оси которого расположены приводные валы 2 по одному с каждого борта. Указанные приводные валы получают вращение от силовой установки (не показана), располагаемой либо внутри фюзеляжа, либо снаружи него в зависимости от типа и схемы построения летательного аппарата. На свободном конце каждого приводного вала 2 смонтирован в виде отдельного узла приводной механизм 3, посредством которого приводной вал связан по каждому борту аппарата с одной тягой 4, на концах которой закреплены лопасти 5. Каждый приводной механизм закреплен соответствующим образом на опоре 6, фиксируемой на фюзеляже летательного аппарата. При этом лопасти, закрепленные на концах каждой тяги? противоположно расположены по отношению друг к другу.
Конструкция приводного механизма 3 для летательного аппарата по второму примеру исполнения представлена на фиг. 10.
Приводной механизм представляет собой выполненный в корпусе конический редуктор, боковая шестерни которого, зацепленная с центральной шестерней, установлена с возможностью вращения на оси крестовины, при этом центральная шестерня зафиксирована неподвижно в опоре для корпуса, корпус установлен относительно указанной опоры с возможностью вращения, а боковая шестерня выполнены с возможностью вращения относительно корпуса, при этом с боковой шестерней связана тяга, ось которой перпендикулярна оси этой шестерни и на концах которой закреплены указанные лопасти, противоположно расположенные относительно друг друга.
Ниже приводится конкретная конструкция этого механизма.
Каждый приводной вал 2 (фиг. 10) выполнен со стороны конца, располагаемого вне фюзеляжа, в виде крестовины с тремя взаимно перпендикулярными осями 7. На центральной оси крестовины расположена центральная коническая шестерня 8, ступица которой, установленная на подшипниках в корпусе 9 приводного механизма, зафиксирована от проворота и осевого смещения в опоре 6. Таким образом, приводной вал может вращаться внутри этой шестерни, а корпус приводного механизма может вращаться относительно центральной шестерни. Внутри крестовины перпендикулярно оси приводного вала пропущен дополнительный вал 16, с которым жестко связана одна боковая коническая шестерня 10, зацепленная с центральной шестерней 8 с обеспечением равного передаточного отношения в зацеплениях шестерен, величина которого определяется из условия, что угловая скорость вращения приводного вала равна угловой скорости вращения каждой боковой шестерни.
С дополнительным валом 16 жестко связана тяга 4, несущая на своих концах лопасти 5. При этом лопасти расположены противоположно друг другу с тем, чтобы при вращении всякий раз каждая лопасть занимала соответствующее положение по потоку навстречу движения. При этом ось тяги перпендикулярна оси боковой шестерни.
Оснащенный приводными механизмами летательный аппарат с вертикальным взлетом и посадкой типа вертолета реализует новый принцип вращения лопастей. Лопасти перемещаются по траектории лемнискаты с расположением лопастей по положительному углу атаки навстречу движению, при этом в момент создания максимальной подъемной силы каждый раз лопасть находится в невозмущенном потоке.
При вращении от силовой установки горизонтально расположенных по бортам фюзеляжа приводных валов 2 происходит вращение корпуса 9 с угловой скоростью ω, равной угловой скорости вращения приводного вала 2. При вращении корпуса 9 происходит вращение вокруг оси Z (фиг. 6) боковых шестерен 10, которые при этом также обкатываются вокруг центральной шестерни 8, с которой они зацеплены. Выбором передаточного отношения (например, равного 1:1) обеспечивают вращение боковых шестерен вокруг своей оси с такой же угловой скоростью ω, равной угловой скорости вала 2.
Связанные с боковыми шестернями тяги 4 так же совершают вращение с угловой скоростью, равной угловой скорости боковых шестерен. А наличие кулачкового устройства в связи тяги с осью крестовины внутри ступицы боковой шестерни позволяет обеспечить при этом и угловой поворот тяги в диапазоне ±45o, величина которого однозначно определена видом траектории лемнискаты. Такое исполнение вращения лопастей позволяет получить существенное сокращение сил сопротивления. В связи с этим повышается эффективность и надежность создания подъемной силы.
Настоящее изобретение промышленно применимо, так как для его создания не требуется специально разработанных новых технологий и специального оборудования, кроме того, что используется при создании редукторов и изготовлении летательных аппаратов.

Изобретение относится к области воздухоплавания и касается конструкции летательного аппарата вертикального взлета и посадки. Летательный аппарат содержит фюзеляж, приводной от силовой установки механизм, имеющий по каждому борту фюзеляжа приводной вал. С каждым из приводных валов кинематически посредством тяг связаны лопасти. Лопасти выполнены с возможностью вращения в плоскости с постоянной угловой скоростью вокруг оси приводного вала с положительным углом атаки каждой лопасти. Приводной механизм выполнен с функцией дополнительного вращения указанных лопастей с такой же угловой скоростью вокруг перпендикулярной оси приводного вала неподвижной оси, расположенной в вышеуказанной плоскости вращения лопастей. Такое выполнение летательного аппарата позволяет повысить его эксплуатационную эффективность и надежность. 4 з.п. ф-лы, 10 ил.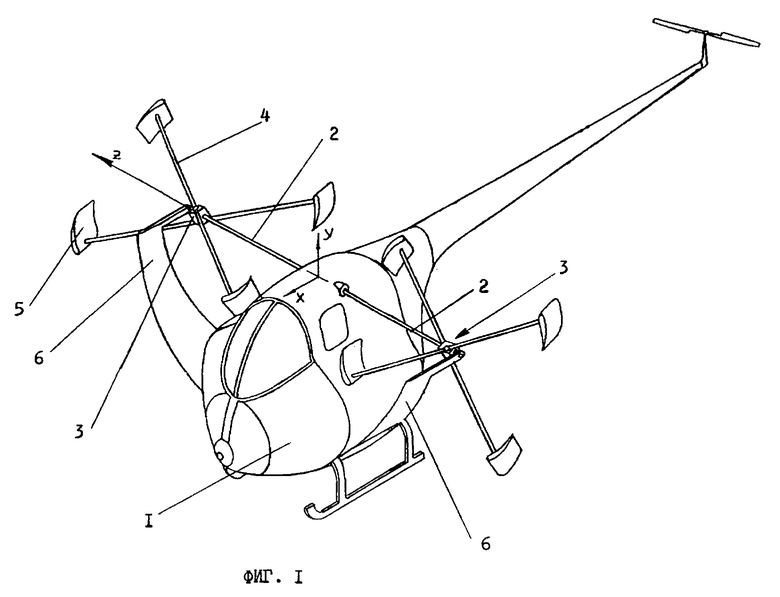
| US 5265827 A, 30.11.1993 | |||
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ, НАПРИМЕР, ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2117605C1 |
| US 3838835 A, 01.10.1974 | |||
| US 4208025 A, 17.06.1980. | |||

