Изобретение относится к области гидроакустики и может быть использовано аквалангистами для определения пеленга на гидроакустический маяк в морской среде.
Известно устройство того же назначения, содержащее волоконно-оптический интерферометр, выполненный в виде оптически согласованных источника когерентного света, двух волоконных катушек и фотоприемника, а также усилитель, подключенный входом к выходу фотоприемника, а выходом - к полосовому фильтру [1]. Данное устройство принято за прототип.
Волоконные катушки в прототипе расположены соосно и выполнены с шагом намотки витков, подчиняющемуся синусоидальному закону, при этом витки обеих катушек пространственно сдвинуты относительно друг друга на половину шага намотки в направлении оси катушек.
Недостатком прототипа является сложность его изготовления, связанная с синусоидальным законом намотки волоконных катушек. А также ограниченность его применения случаем только одной определенной частоты работы гидроакустического маяка.
Техническим результатом, получаемым от внедрения изобретения, является устранение данных недостатков прототипа, т.е. упрощение конструкции и расширение области применения прототипа на случай любых излучаемых гидроакустическим маяком сигналов.
Данный технический результат достигают за счет того, что в известном волоконно-оптическом пеленгаторе гидроакустического маяка, содержащем волоконно-оптический интерферометр, выполненный в виде оптически согласованных источника когерентного света, двух волоконных катушек и фотоприемника, а также усилитель, подключенный входом к выходу фотоприемника, а выходом - к полосовому фильтру, волоконные катушки равномерно намотаны на две одинаковые полусферы, расположенные на определенном расстоянии друг от друга, при этом интерферометр пеленгатора снабжен фазосдвигающим устройством, расположенным в одной из волоконных катушек, а сам пеленгатор снабжен нуль-индикаторами, подключенными к выходу полосового фильтра.
Расстояние между центрами полусфер превышает не менее чем в пять раз диаметр полусфер.
Источник когерентного света может быть выполнен импульсным с возможностью регулировки длительности и скважности генерируемых импульсов.
А нуль-индикаторы могут быть выполнены в виде стрелочного прибора и головного телефона.
На фиг. 1 представлена оптико-электронная схема пеленгатора; на фиг.2, а-в, 3 - диаграммы, поясняющие принцип работы пеленгатора.
Волоконно-оптический пеленгатор гидроакустического маяка (не показан) содержит волоконно-оптический интерферометр, выполненный в виде оптически согласованных источника 1 когерентного света, двух аналогичных волоконных катушек 2, 3 и фотоприемника 4, а также фазосдвигающего устройства 5, установленного, например, в катушке 3 (фиг.1).
Источник 1 когерентного света, выполненный, например, в виде светодиода, подключен к источнику 6 питания, который позволяет задавать различные режимы излучения светодиода: непрерывный или импульсный с различной длительностью и частотой следования импульсов.
Электронная схема пеленгатора включает в себя усилитель 7 фототока, подключенный входом к выходу фотоприемника 4, выполненного, например, в виде фотодиода. Имеются также полосовой фильтр 8, настроенный на частоту работы маяка (не показан), и индикаторы 9, 10, выполненные соответственно в виде стрелочного прибора 9 с подсветкой шкалы и головных телефонов 10 (наушников).
Стрелочный индикаторный прибор 9 может одеваться на руку аквалангиста.
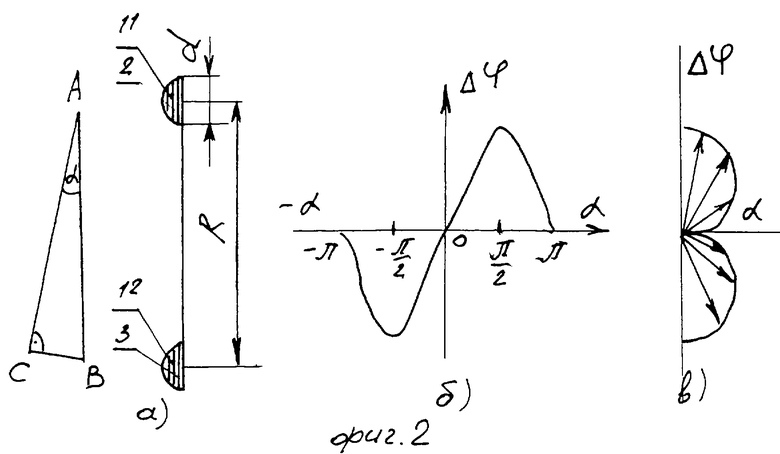
Полусферы 11, 12 (фиг. 2, а) разнесены на расстояние R друг от друга (между центрами полусфер), которое превышает диаметр d полусфер не менее чем в пять раз. Это позволяет избавиться от самовлияния волоконных катушек 2, 3, намотанных равномерно на полусферы 11, 12, при приеме плоских фронтов акустических волн маяка. Расстояние R условно названо базой пеленгатора.
Максимальное расстояние R ограничивается практическими возможностями транспортировки пеленгатора подводным носителем, а также удобствами эксплуатации прибора.
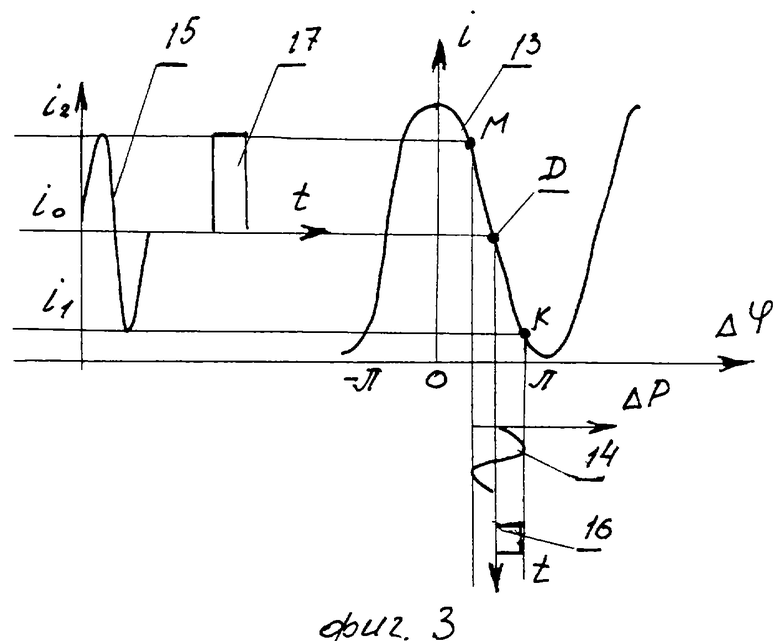
Пеленгатор работает следующим образом. Перед эксплуатацией волоконно-оптический интерферометр пеленгатора настраивают с помощью фазосдвигающего устройства 5 на разность фаз интерферирующих лучей, равной π/2. При этом рабочая точка D на выходной кривой 13 интерферометра располагается в середине квазилинейного участка МК (фиг.3).
Поскольку в процессе эксплуатации пеленгатора обе волоконные катушки находятся практически в одинаковых условиях (температура, гидростатическое давление), то рабочая точка D не смещается от своего первоначального положения под действием гидрофизических факторов (фототок на выходе интерферометра в отсутствии гидроакустического сигнала будет равен i0).
Амплитуда ΔР поступающего на вход интерферометра гидроакустического сигнала 14 (например, гармонической формы зависит от величины азимутального угла α (фиг.2).
Если фронт АВ плоской волны параллелен отрезку R, соединяющему центры полусфер 11, 12 (фиг.2,а), угол α будет равен нулю. При этом сигнал 15 на выходе интерферометра также будет равен нулю, поскольку разность фаз Δϕ равна нулю.
При отклонении базы пеленгатора R вправо или влево фронт АС плоской волны будет достигать волоконных катушек 2, 3 в разное время, при этом на выходе интерферометра будет зафиксирована разность фаз:
Δϕ = кRsinα,
где к - волновое число падающей плоской волны.
Данное соотношение вытекает из прямоугольного треугольника АВС (фиг.2,а) и представлено графически в декартовых (фиг.2,б) и полярных координатах (фиг.2,в).
Разность фаз Δϕ будет преобразоваться интерферометром в гармоническую составляющую фототока 15 с амплитудой (i2-i1)/2 (фиг.3) и частотой f, на которой работает гидроакустический маяк.
Полосовой фильтр 8 (фиг.1) в этом случае целесообразно предварительно настроить на частоту f работы маяка (не показан). Тогда полезный сигнал 15 будет уверенно выделяться на фоне помех.
Сигнал 15 после усиления усилителем 7 и выделения его полосовым фильтром 8 поступает на индикаторы 9,10. При этом, если оператор-гидроакустик или аквалангист услышит в наушниках 10 тональный звук соответствующей частоты f или увидит отклонение стрелки индикатора 9 от нулевого положения, то производится операция рыскания прибором (поворот базы в пеленгаторе вправо-влево) до момента нахождения направления, при котором угол ϕ=0. Таким образом, выбор направления движения подводного объекта (не показан) ведется по нулевому сигналу. Поскольку в области нулевого значения α зависимость Δϕ(α) имеет максимальную производную, то настройка на пеленг с помощью данного прибора будет достаточно точной.
С другой стороны, направления α = ±π невозможно спутать с направлением на пеленг, поскольку из-за экранировки одной волоконной катушки другой в этих положениях наблюдается характерный сбой в работе интерферометра.
Ухо человека более чувствительно к появлению прерывистого, а не тонального сигнала. Поэтому в ряде случаев гидроакустический маяк заставляют работать в режиме генерации последовательности импульсов 16 (фиг.3). При этом на выходе интерферометра появляется последовательность импульсов 17.
Работа пеленгатора в данном режиме повторяет описанный выше. Однако с целью экономии электропитания (прибор работает в автономном режиме) целесообразно источник 1 когерентного света перевести в режим генерации последовательности когерентных импульсов с длительностью и частотой следования, равной длительности и частоте следования генерируемых гидроакустическим маяком импульсов.
Данная операция осуществляется перед эксплуатацией прибора ручкой настройки длительности и скважности импульсов на источнике 6 питания светодиода.
Таким образом, в отличие от прототипа заявленный пеленгатор работает на любых сигналах гидроакустического маяка и значительно более прост по конструкции, за счет этого и достигается поставленный технический результат.
Источники информации.
1. Патент 2105990 РФ, кл. G 01 S 3/80, 1998 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВОДНОГО САМОДВИЖУЩЕГОСЯ ОБЪЕКТА | 2002 |
|
RU2226702C1 |
| ПОРТАТИВНАЯ ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2002 |
|
RU2233458C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2236690C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТОЯНСТВА ТЕМПЕРАТУРЫ ЖИДКОЙ СРЕДЫ | 2005 |
|
RU2290615C1 |
| УКАЗАТЕЛЬ ОТКЛОНЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ПЛАВСРЕДСТВА ОТ ЗАДАННОГО ЗНАЧЕНИЯ | 2005 |
|
RU2287831C1 |
| АДДИМЕТР | 2005 |
|
RU2287828C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК | 1996 |
|
RU2105990C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ОКЕАНЕ | 1995 |
|
RU2105955C1 |
| ПОДВОДНОЕ РАЗВЕРТЫВАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2214656C2 |
| ГИДРООПТИЧЕСКАЯ АППАРАТУРА ДЛЯ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2193213C1 |
Изобретение относится к области гидроакустики и может быть использовано аквалангистами для определения пеленга на гидроакустический маяк в морской среде. Существо изобретения заключается в том, что на определенном расстоянии друг от друга располагают две волоконно-оптические катушки, оптически согласованные с источником когерентного света и фотоприемником в интерферометр. Плоская звуковая волна от гидроакустического маяка приходит одновременно на обе катушки только в случае, если ее фронт будет параллелен базе измерения. В этом случае на выходе интерферометра наблюдается нулевая разность фаз, а значит, и нулевой выходной сигнал, регистрируемый стрелочным нуль-органом и головными телефонами аквалангиста. При отклонении аквалангиста от направления заданного пеленга на выходе прибора появляется сигнал тем больший, чем больше величина данного отклонения. Достигаемым техническим результатом изобретения является упрощение конструкции и расширение области применения устройства на случай любых излучаемых гидроакустическим маяком сигналов. 3 ил.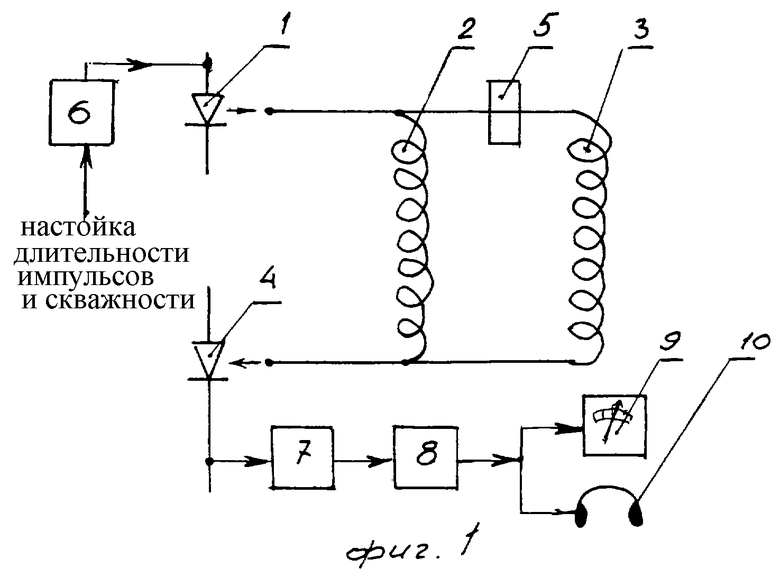
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК | 1996 |
|
RU2105990C1 |
| ПОРТАТИВНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2000 |
|
RU2176091C1 |
| Способ регистрации акустической волны | 1991 |
|
SU1818604A1 |
| US 4115753, 19.09.1978 | |||
| US 4648082, 03.03.1987. | |||

