Изобретение относится к гидроакустике и может быть использовано для навигационных целей аквалангистами, водолазами и различными легкими автономными подводными плавсредствами.
Известно устройство аналогичного назначения, выполненное в виде двух волоконных катушек, оптически согласованных в интерферометр с источником когерентного света и фотоприемником [1]. Особенностью известного устройства является то, что витки волоконных катушек в интерферометре намотаны по синусоидальному закону с периодом Λ. Причем витки одной катушки сдвинуты по отношению к виткам другой на половину периода. Гидроакустический маяк направляет во все стороны акустические волны с периодом Λ. Волоконный интерферометр принимает эти волны, поворачивая с помощью поворотной системы волоконные катушки в направлении прихода волн. При этом одновременно отслеживается искомый азимутальный угол.
Недостатком известного устройства [1] является невозможность его применения в условиях сильнопересеченного морского дна, например, скальными породами.
Известна портативная гидроакустическая навигационная система для самодвижущегося подводного объекта, реализованная в одном из вариантов волоконного оптического шумопеленгатора [2], содержащая гидроакустический излучатель и установленные на объекте оптически согласованные в интерферометр источник когерентного света, две волоконные катушки, в одной из которых расположено фазосдвигающее устройство, и фотоприемник, выход которого через усилитель фототока подключен к параллельно соединенным визуальному индикаторному прибору и головному телефону, при этом одна из волоконных катушек выполнена в виде двух последовательно соединенных частей.
Данная система принята за прототип. Особенностью работы прототипа является то, что его волоконно-оптический интерферометр формирует шумопеленгатор, работающий сначала в режиме широкой диаграммы направленности для грубого нахождения азимутального угла, а затем в режиме узкой диаграммы направленности для точного определения азимута.
Недостатком прототипа как и аналога является невозможность его использования в сложных условиях пересечения морского дна, например, при прохождении подводного объекта через подводные пещеры, тоннели и т.п.
Техническим результатом, получаемым от внедрения изобретения, является устранение указанного недостатка, т.е. получение возможности навигации подводного объекта в сложных условиях пересечения морского дна при плохой видимости.
Данный технический результат достигают за счет того, что в известной портативной гидроакустической навигационной системе для самодвижущегося подводного объекта, содержащей гидроакустический излучатель и установленные на объекте оптически согласованные в интерферометр источник когерентного света, две волоконные катушки, в одной из которых расположено фазосдвигающее устройство, и фотоприемник, выход которого через усилитель фототока подключен к параллельно соединенным визуальному индикаторному прибору и головному телефону, при этом одна из волоконных катушек выполнена в виде двух последовательно соединенных частей, вторая волоконная катушка также выполнена в виде двух последовательно соединенных частей, причем части различных волоконных катушек симметрично установлены относительно осевой линии самодвижущегося подводного объекта по ортогональной системе координат, а гидроакустический излучатель закреплен на этой осевой линии объекта на одинаковом расстоянии от частей волоконных катушек и выполнен в виде излучателя гидроакустических импульсов.
При этом гидроакустический излучатель может быть выполнен с равномерной характеристикой направленности, а последовательно соединенные части волоконных катушек снабжены рупорами, попарно ориентированными в противоположные стороны по ортогональной системе координат.
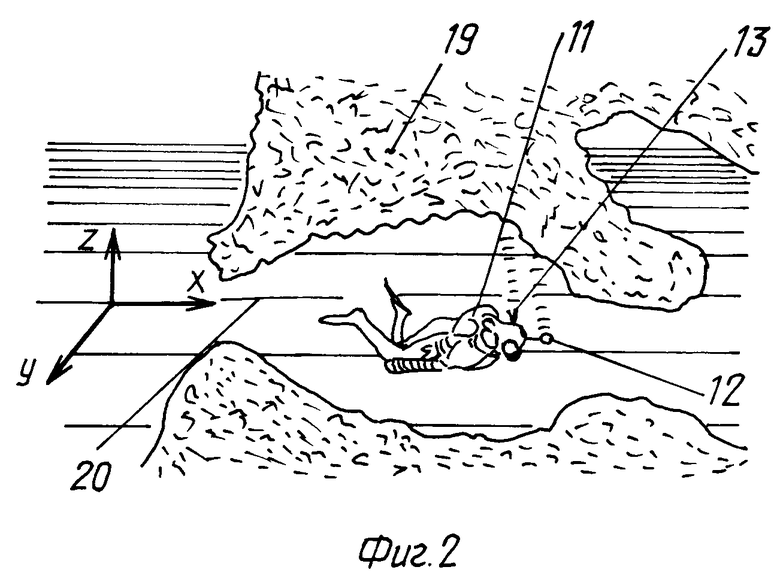
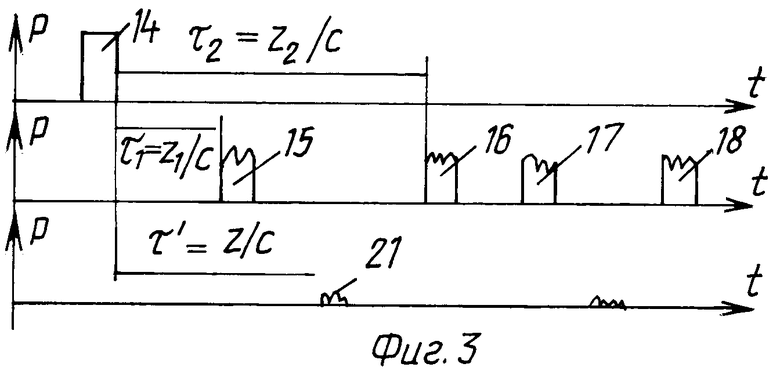
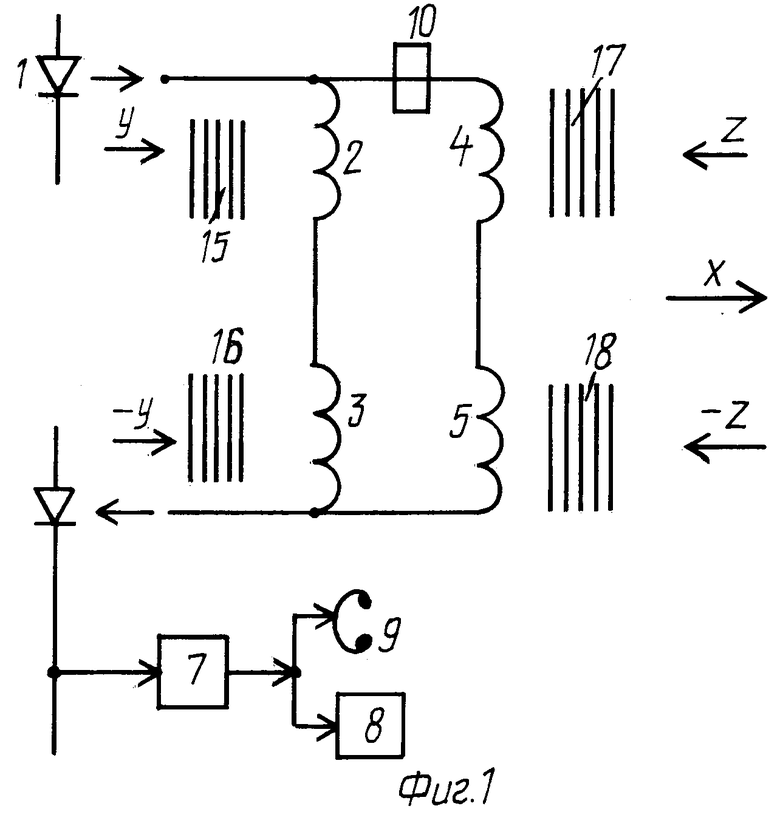
Изобретение поясняется чертежом, на фиг.1 представлена оптическая навигационная схема системы; на фиг.2 - схема работы навигационной системы в условиях морского тоннеля; на фиг.3 - временные диаграммы, показывающие работу навигационной системы.
Портативная гидроакустическая навигационная система содержит оптически согласованные в интерферометр источник 1 когерентного света, две волоконные катушки, выполненные из последовательно соединенных частей, соответственно 2, 3 и 4, 5, а также фотоприемник 6, подключенный выходом к усилителю 7 фототока, выход которого соединен с визуальным индикатором 8 и головным телефоном 9 (фиг.1).
В одной из волоконных катушек, например 4, 5, установлено фазосдвигающее устройство 10.
Последовательно соединенные части волоконных катушек 2, 3 и 4, 5 симметрично установлены относительно осевой линии самодвижущегося подводного объекта 11 (например, аквалангиста).
На фиг.2 осевая линия объекта 11 проходит в направлении оси x, вдоль направления движения аквалангиста. Осевая линия подводного объекта 11 проводится условно так, чтобы ориентированные в направлении координатных осей y, z подводные части аквалангистского снаряжения выступали на одинаковом расстоянии от нее.
На осевой линии объекта 11, например, впереди по направлению движения на самом подводном объекте закрепляется гидроакустический излучатель 12 с равномерной характеристикой направленности. При этом части волоконных катушек 2, 3 и 4, 5 (фиг.1) расположены на одинаковом расстоянии от гидроакустического излучателя 12 (фиг.2), соответственно по координатным осям y и z.
Гидроакустический излучатель 12 выполнен в виде излучателя гидроакустических импульсов.
На фиг.2 координатные оси x, y, z представлены в естественном виде, а на фиг.1 представлены условно только направления координатных осей в плоскости чертежа.
В частном случае последовательно соединенные части 2, 3 и 4, 5 волоконных катушек снабжены гидроакустическими рупорами 13 для обострения характеристик направленности гидроакустических приемников, которыми являются эти части волоконных катушек. (На фиг.2 показаны только рупоры, ориентированные в направлении оси z.)
Портативная гидроакустическая навигационная система работает следующим образом.
Перед началом эксплуатации системы с помощью фазосдвигающего устройства 10 рабочая точка интерферометра направляется на начальную разность фаз интерферирующих лучей, равную π/2.
При подходе к опасной зоне аквалангист включает блоки питания (на чертеже не показаны) оптоэлектронных приборов 1, 6, 7, а также гидроакустического излучателя 12 гидроакустических импульсов 14 (фиг.3).
Гидроакустический импульс 14, распространяясь вдоль координат y, z, отражается от опасных зон подводного объекта 11 препятствий (на фиг.2 скальные породы) и возвращается через времена  ,
,  ,
,  ,
,  к частям 2, 3 и 4, 5 волоконных катушек интерферометра.
к частям 2, 3 и 4, 5 волоконных катушек интерферометра.
Импульсы 15, 16, 17, 18, отраженные от скальных пород 19, условно представленные на фиг.1 и 3, будут вызывать на выходе интерферометра изменения разных фаз и изменение фототока на выходе фотоприемника 6.
При этом на визуальном индикаторе 8, снабженном соответствующим интегратором (на чертеже не показан), появится сигнал, а в головных телефонах - характерный треск, указывающие на то, что аквалангист плывет не в середине прохода 20 в скальных породах 19 (фиг.2).
При соответствующем навигационном маневре, когда аквалангист 11 начинает плыть в середине прохода 20 по координатам x и y, отраженные сигналы 15, 17 и 16, 18 достигают частей 2, 4 и 3, 5 волоконных катушек одновременно соответственно через времена  и
и  .
.
Это приводит к тому, что в идеальном случае выходной сигнал с фотоприемника 6 будет отсутствовать, поскольку изменения разности фаз интерферирующих лучей в интерферометре не произойдет.
В реальных условиях аквалангист 11 в этом случае будет регистрировать в головных телефонах незначительный шум (в виде сигнала 21), обусловленный неровностями звукоотражающих поверхностей, но значительно меньший по сравнению с сигналами 15...18.
Любое отклонение аквалангиста в ту или иную сторону по координатам y, z будет приводить к появлению характерного сигнала, указывающего на необходимость проведения соответствующего пространственного маневра.
Таким образом, данная портативная гидроакустическая навигационная система позволяет подводному самодвижущемуся объекту осуществить навигацию в сложных условиях пересеченного морского дна, чем достигается поставленный технический результат.
Источники информации
1. Патент РФ №2105990, кл. G 01 S 3/80, 1998.
2. Патент РФ №2176091, кл. G 01 S 3/82, 2001 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВОДНОГО САМОДВИЖУЩЕГОСЯ ОБЪЕКТА | 2002 |
|
RU2226702C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2236690C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПЕЛЕНГАТОР ГИДРОАКУСТИЧЕСКОГО МАЯКА | 2002 |
|
RU2223513C1 |
| ДАТЧИК КОНТРОЛЯ ОТКЛОНЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ ПЛАВСРЕДСТВА ОТ ЗАДАННЫХ ЗНАЧЕНИЙ | 2003 |
|
RU2249792C1 |
| ГИДРООПТИЧЕСКАЯ АППАРАТУРА ДЛЯ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2193213C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ МОРСКОЙ СРЕДЫ | 2004 |
|
RU2271617C1 |
| ГОЛОГРАФИЧЕСКАЯ АКУСТООПТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ В НАТУРНОМ ВОДОЕМЕ | 2003 |
|
RU2236691C1 |
| АДДИМЕТР | 2005 |
|
RU2287828C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА ДЛЯ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМУЮ МОРСКУЮ АКВАТОРИЮ | 2000 |
|
RU2172000C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ОКЕАНЕ | 1995 |
|
RU2105955C1 |
Изобретение относится к гидроакустике и может быть использовано для навигационных целей аквалангистами, водолазами и различными легкими автономными подводными плавсредствами. Технический результат заключается в возможности навигации подводного объекта в сложных условиях пересечения морского дна при плохой видимости. Портативная гидроакустическая навигационная система для самодвижущегося подводного объекта содержит гидроакустический излучатель и установленные на объекте оптически согласованные в интерферометр источник когерентного света, две волоконные катушки, в одной из которых расположено фазосдвигающее устройство, и фотоприемник, выход которого через усилитель фототока подключен к параллельно соединенным визуальному индикаторному прибору и головному телефону, при этом одна из волоконных катушек выполнена в виде двух последовательно соединенных частей, вторая волоконная катушка также выполнена в виде двух последовательно соединенных частей, причем части различных волоконных катушек симметрично установлены относительно осевой линии самодвижущегося подводного объекта по ортогональной системе координат, а гидроакустический излучатель закреплен на этой осевой линии объекта на одинаковом расстоянии от частей волоконных катушек и выполнен в виде излучателя гидроакустических импульсов. 1 з.п.ф-лы, 3 ил.
| ПОРТАТИВНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2000 |
|
RU2176091C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК | 1996 |
|
RU2105990C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ АНТЕННА | 1995 |
|
RU2112248C1 |
| US 4115753, 19.09.1978 | |||
| US 4279027, 14.07.1981 | |||
| WO 0225303, 28.03.2002. | |||

