Изобретение относится к гидроакустике и может использоваться аквалангистами и легкими подводными автономными плавсредствами для целей навигации в морях и океанах.
Известна гидроакустическая навигационная система (ГНС), выполненная в виде двух волоконных катушек, оптически согласованных в интерферометр с источником когерентного света и фотоприемником [1]. Витки волоконных катушек в известной ГНС намотаны по синусоидальному закону. Причем витки одной катушки по отношению к виткам другой катушки сдвинуты на половину периода Λ/2.
Гидроакустический маяк направляет во все стороны акустические волны с периодом Λ. Это позволяет плавсредству с помощью известной ГНС точно следовать в направлении маяка.
Недостатком известной системы является невозможность обеспечения с ее помощью движения плавсредства в любом направлении относительно маяка.
Известна ГНС, содержащая гидроакустический маяк и оптически согласованные в интерферометр через первую и вторую волоконные катушки источник когерентного света и фотоприемник, подключенный выходом через усилитель к индикатору, а также фазосдвигающее устройство, установленное в одной из волоконных катушек, при этом первая из волоконных катушек намотана на полую цилиндрическую подложку постоянного радиуса R [2].
Данная система принята за прототип.
Недостатком прототипа, как и аналога, является невозможность с его помощью обеспечения навигации плавсредства в любом относительно маяка направлении.
Техническим результатом, получаемым от внедрения изобретения, является обеспечение навигации плавсредства в любом направлении относительно гидроакустического маяка.
Данный технический результат достигается за счет того, что в известной ГНС, содержащей гидроакустический маяк и оптически согласованные в интерферометр через первую и вторую волоконные катушки источник когерентного света и фотоприемник, подключенный выходом через усилитель к индикатору, а также фазосдвигающее устройство, установленное в одной из волоконных катушек, при этом первая из волоконных катушек намотана на полую цилиндрическую подложку постоянного радиуса R [м], вторая волоконная катушка намотана на вторую цилиндрическую подложку с изменяющимся по спирали Архимеда радиусом r (м) < R (м), соосную первой цилиндрической подложке, при этом расстояние (R-r) [м] между первой и второй цилиндрической подложками задано изменяющимся в функции азимутального угла ϕ [град] по закону

где m (м);  - постоянные размерные коэффициенты, причем цилиндрические подложки выполнены из звукопрозрачного материала, а гидроакустический маяк выполнен с возможностью его работы в импульсном режиме.
- постоянные размерные коэффициенты, причем цилиндрические подложки выполнены из звукопрозрачного материала, а гидроакустический маяк выполнен с возможностью его работы в импульсном режиме.
В частном случае полая первая цилиндрическая подложка ГНС закреплена на сплошной второй цилиндрической подложке с помощью крепежных створок из звукопрозрачного материала, а пространство между первой и второй цилиндрическими подложками заполняется морской водой.
В другом частном случае пространство между первой и второй цилиндрическими подложками заполняют твердым звукопрозрачным материалом.
В качестве звукопрозрачного материала в ГНС используют материал с акустическим сопротивлением, равным (или близким) акустическому сопротивлению морской воды, например сферопластик.
Блоки электронной аппаратуры ГНС могут дополнительно включать в себя цифроаналоговый преобразователь (ЦАП), установленный между усилителем и индикатором, а также бортовой процессор, подключенный входом к выходу усилителя.
В состав ГНС может также входить поворотное устройство, на оси вращения которого закреплены цилиндрические подложки и датчик угла его поворота, электрический выход которого подключен к входу процессора.
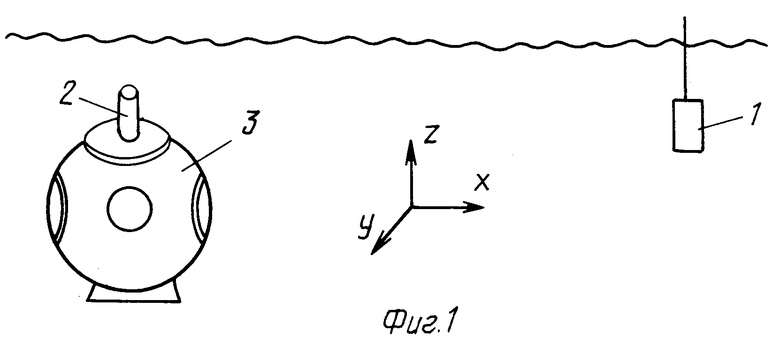
Изображение поясняется чертежами: на фиг.1 представлена общая схема ГНС; на фиг.2 - его оптико-электронная схема; на фиг.3 - сечение первой и второй цилиндрических подложек; на фиг.4 - градуировочные по азимутальному углу ϕ кривые ГНС.
ГНС содержит гидроакустический маяк 1 (фиг.1) и средство 2 определения азимутального угла ϕ по отношению к маяку 1, закрепленное на плавсредстве 3, в данном случае батискафе.
В состав ГНС входят оптически согласованные в интерферометр через первую и вторую волоконные катушки 4, 5 (фиг.2) источник 6 когерентного света и фотоприемник 7. В одной из волоконных катушек, например в катушке 5, установлено фазосдвигающее устройство 8.
Выход фотоприемника 7 подключен через усилитель 9 фототока к ЦАП 10 и бортовому процессору 11 с индикатором 12 (конструктивно входящий в состав процессора 11).
Выход ЦАП подключен к другому индикатору 13 аналогового сигнала.
Средство 2 определения азимутального угла ϕ по отношению к гидроакустическому маяку 1 (фиг.1) соосно закреплено на оси вращения поворотного устройства (не показано), снабженного датчиком 14 угла поворота (фиг.2), электрический выход которого также подключен к процессору 11.
Волоконная катушка 4 намотана на цилиндрическую подложку 15 (фиг.3) постоянного радиуса R. Волоконная катушка 5 намотана на цилиндрическую подложку 16 с изменяющимся по спирали Архимеда радиусом r<R.
Подложки 15, 16 соосны. Если азимутальный угол ϕ изменяется от 0 до 2π, то, исходя из свойства спирали Архимеда [3], расстояние между катушками 4, 5 будет изменяться линейно по закону (R-r) = m + kϕ, где m, k - постоянные размерные коэффициенты.
Полая подложка 15 может быть закреплена на сплошной подложке 16 с помощью крепежных створок (не показаны). В этом случае пространство между катушками 4 и 5 и подложками 15 и 16 заполняется рабочей средой (морской водой).
В другом варианте упомянутое пространство может быть заполнено звукопрозрачным материалом, например сферопластиком, имеющим акустическое сопротивление, приблизительно равное акустическому сопротивлению воды.
Подложка 16 и крепежные створки (не показаны) также изготовляют из звукопрозрачного материала.
Гидроакустический маяк 1 работает в режиме последовательности акустических импульсов. При этом частота f следования импульсов выбирается такой, чтобы выполнялось условие
где с - скорость звука в воде, для всех значений (R-r), включая минимальное для ϕ=0.
Неравенство (2) обеспечивает условие, при котором на катушки 4, 5 попадает одновременно два акустических импульса, следующих от гидроакустического маяка 1.
На фиг.4 показан ряд градуировочных кривых (а, б, в) ГНС для значений азимутальных углов ϕ=0÷2π. Они представляют собой прямые, пересекающие ось ординат на значении, задаваемом коэффициентом "m" градуировочного уравнения (1). Нетрудно заметить, что значение коэффициента "k", задающего наклон градуировочных прямых, зависит от формы спирали Архимеда (архимедовы спирали).
Значение же коэффициента "m" зависит от скорости звука "с" в воде и минимального расстояния (R-r)min, обозначенного на фиг.3.
Поскольку физические свойства рабочей среды (морской воды) не влияют на форму спирали Архимеда, а влияют только на скорость звука "с" в воде, то для определения рабочей градуировочной кривой "а", "б" или "в" (фиг.4) достаточно осуществить калибровку ГНС для одного из азимутальных направлений, условно принятого за нулевое (ϕ=0). Для этого непосредственно в рабочей среде поворачивают средство 2 (фиг.1) по азимутальному углу ϕ до тех пор, пока время пролета акустическим импульсом от гидроакустического маяка 1 расстояния (R-r) не будет минимальным. Данная операция, называемая калибровкой прибора, позволяет определить коэффициент "m" в уравнении (1) и точку пересечения прямой "а", "б" или "в" на фиг.4 с осью ординат, т.е. выбрать соответствующую для данных условий градуировочную кривую прибора.
После калибровки ГНС по азимутальному углу ϕ плавсредство 3 направляют в требуемом направлении относительно маяка 1.
Если с помощью поворотного устройства (не показано) подложки ГНС поворачивать с равномерной скоростью вокруг оси, а плавсредство 2 будет при этом двигаться с равномерной скоростью вдоль заданного направления, то в силу свойства спирали Архимеда [3] на выходе ГНС будет наблюдаться постоянство выходного сигнала.
Действительно, в этом случае спираль Архимеда будет повернута к маяку одной и той же "точкой", и расстояние (R-r), задающее "гидроакустическую базу" измерений, будет пониженным. А значит и время пролета  этой базы измерения акустическим импульсом маяка будет также постоянным. Любое отклонение τ от заданной величины фиксируется процессором, связанным выходом с авторулевым плавсредством 3 (не показано).
этой базы измерения акустическим импульсом маяка будет также постоянным. Любое отклонение τ от заданной величины фиксируется процессором, связанным выходом с авторулевым плавсредством 3 (не показано).
Навигацию плавсредства 3 можно осуществлять и в ручном режиме, пользуясь показаниями индикаторов 12, 13.
При неподвижном положении цилиндрических подложек 15, 16 движение плавсредства 3 относительно маяка 1 приводит к изменению азимутального угла ϕ, а значит и изменению времени пролета τ акустической базы гидроакустическими импульсами, поступающими от маяка 1.
Характер изменения τ во времени непрерывно фиксируется и обрабатывается процессором 11. А индикаторы 12, 13 фиксируют курс плавсредства в удобном для оператора виде.
Если ГНС используется в облегченном варианте (без процессора 11 и поворотного устройства), например аквалангистом, то последний может с помощью системы совершать следующие маневры относительно гидроакустического маяка 1.
Двигаться кругами относительно маяка 1, фиксируя постоянство сигнала по индикатору 13.
Двигаться равномерно в любом направлении, наблюдая линейное возрастание или убывание выходного сигнала.
Наконец, двигаться, как в прототипе, по направлению к гидроакустическому маяку 1, фиксируя заданный выходной сигнал на выходе ГНС.
Таким образом, по сравнению с прототипом навигационные возможности ГНС расширились за счет обеспечения возможности движения подводного плавсредства в любом направлении относительно гидроакустического маяка, чем и достигается поставленный в заявке технический результат.
Источники информации
1. Патент РФ №2105990, кл. G 01 S 3/80, 1998.
2. Патент РФ №2176091, кл. G 01 S 3/82, 2001 - прототип.
3. Политехнический словарь. - М.: Сов. энц., 1980, с. 33, 34, архимедова спираль.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАТИВНАЯ ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2002 |
|
RU2233458C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПЕЛЕНГАТОР ГИДРОАКУСТИЧЕСКОГО МАЯКА | 2002 |
|
RU2223513C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК | 1996 |
|
RU2105990C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВОДНОГО САМОДВИЖУЩЕГОСЯ ОБЪЕКТА | 2002 |
|
RU2226702C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ МОРСКОГО ТЕЧЕНИЯ | 2004 |
|
RU2297007C2 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ПАРУСНОЙ ЯХТЫ ПРОТИВ ВЕТРА | 2005 |
|
RU2295136C2 |
Изобретение относится к гидроакустике и может быть использовано для навигации легких подводных атомных плавсредств. Техническим результатом является обеспечение навигации плавсредства в любом направлении относительно гидроакустического маяка. Существо изобретения заключается в том, что две волоконные катушки волоконно-оптического интерферометра наматываются на цилиндрические подложки, причем одна из подложек выполнена полой и постоянного радиуса, а вторая - сплошной и с радиусом, изменяющим свою величину по архимедовой спирали, подложки выполнены соосными, гидроакустические импульсы от подводного маяка вызывают на выходе интерферометра появление двух импульсов фототока, временное расстояние между которыми дает информацию об азимутальном угле. 5 з.п. ф-лы, 4 ил.
 - постоянные размерные коэффициенты, причем цилиндрические подложки выполнены из звукопрозрачного материала, а гидроакустический маяк выполнен с возможностью его работы в импульсном режиме.
- постоянные размерные коэффициенты, причем цилиндрические подложки выполнены из звукопрозрачного материала, а гидроакустический маяк выполнен с возможностью его работы в импульсном режиме.
| ПОРТАТИВНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2000 |
|
RU2176091C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР САНЬЯКА ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 1994 |
|
RU2107282C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК СКОРОСТНОГО НАПОРА ПОТОКА ЖИДКОСТИ | 1993 |
|
RU2060505C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ МОРСКОЙ СРЕДЫ | 1993 |
|
RU2061226C1 |
| US 4279027 A, 14.07.1981 | |||
| US 4115753 A, 19.08.1978 | |||
| ШАРОВАЯ МЕЛЬНИЦА ДЛЯ ПОЛУЧЕНИЯ ВОДНОГО ШЛИКЕРА КВАРЦЕВОГО СТЕКЛА | 2011 |
|
RU2460582C1 |

