Область техники, к которой относится изобретение
Изобретение относится к устройству, такому как телескоп или антенна, направлением которых требуется управлять для отслеживания объектов, причем сами эти устройства являются тяжелыми и монтируются на конструкции, установленной в космическом пространстве, на борту космического корабля или на земле, в месте, где возникновение сил реакции или сил инерции является нежелательным. В частности, в случае, когда телескоп, например, установлен на космической станции или на искусственном спутнике Земли, при его передвижении возникает значительная сила инерции, которая воздействует на космическую станцию, и при этом происходит существенное воздействие на стабилизацию положения в пространстве самой станции. В связи с этим предлагается такой телескоп, конструкция которого не создает таких сил инерции, и которая может точно работать в космическом пространстве, на борту космического корабля или на земле.
Уровень техники
Когда большой астрономический телескоп, такой как космический телескоп Хаббл (Hubble) известного уровня техники, необходимо направить на объект, за которым производится наблюдение, он передвигается полностью, что требует значительных затрат энергии. В частности, когда телескоп запускают для работы в космическом пространстве, хотя это и не показано на чертежах, телескоп-рефлектор устанавливают на модуле спутника Земли, и положение в пространстве самого этого спутника Земли должно быть стабилизировано для того, чтобы направлять телескоп на наблюдаемый объект. Такая стабилизация положения в пространстве телескопа выполняется путем стабилизации положения в пространстве модуля спутника, на котором установлен ГМУ (CMG) (гироскоп момента управления), или, управляя положением модуля спутника с помощью реактивной газовой струи. Таким образом, для перемещения космического телескопа необходимы значительные затраты энергии. Кроме того, при работе телескопа, установленного на космической станции, возникают значительные силы инерции, которые не допустимы на космической станции. В связи с этим, в течение длительного времени разрабатывалась такая структура, которая не вызывала бы возникновения таких сил инерции при движении телескопа во время его направления на объект. Кроме того, как и в случае телескопа, необходимо использовать силу реакции ГМУ или подобного устройства, когда на объект требуется направить другое устройство, такое как антенна, или подобное устройство.
В космическом телескопе известного уровня техники, как указано выше, телескоп собирается внутри спутника, и когда его необходимо направить на объект, производится управление положением в пространстве самого модуля спутника. Поэтому, для перемещения телескопа необходима конструкция большого размера, которая требует значительных затрат энергии. В связи с этим требуется разработать телескоп, имеющий простую конструкцию, положением в пространстве которого можно было бы точно управлять. Кроме того, при работе телескопа, установленного на космической станции, когда появляются значительные силы инерции, воздействующие на космическую станцию, возникают проблемы с управлением положением самой космической станции в пространстве. Но возникновение таких сил инерции на космической станции не допустимо, поэтому, кроме того, требуется разработать телескоп, который должен использоваться на космической станции, конструкция которого не создавала бы такие силы инерции.
На фиг. 20 представлен вид конструкции масштабного астрономического телескопа-рефлектора известного уровня техники. На фиг.20 номером 221 обозначен корпус телескопа. В нижней части корпуса 221 телескопа установлено вогнутое зеркало 222, и в его верхней части по центру установлен конденсор 223. В центральной части вогнутого зеркала 222 сформировано сквозное отверстие 225. Камера или окуляр 224 установлены непосредственно ниже отверстия 225.
В астрономическом телескопе представленной выше конструкции свет или луч 230, приходящий из космического пространства, входит в корпус телескопа 221 через его верхнюю часть так, что он отражается вогнутым зеркалом 222, как обозначено цифрой 230а, затем фокусируется конденсором 223, как обозначено номером 230b. Свет, фокусируемый конденсором 223, проходит через отверстие 225, выполненное в центральной части вогнутого зеркала 222, и фокусируется в камере 224, где он снимается как изображение. В телескопе-рефлекторе такой конструкции свет 230, входящий в верхнюю часть корпуса 221 телескопа, частично экранируется конденсором 223, установленным в центральной части корпуса 221 телескопа так, что количество света, приходящего на вогнутое зеркало 222, уменьшается и фокусирующая способность в целом снижается. В связи с этим, также необходимо усовершенствование для получения более точного изображения.
Сущность изобретения
Для решения проблем известного уровня техники настоящее изобретение направлено на решение следующих задач:
(a) разработать телескоп, имеющий такую конструкцию, в которой компенсировались бы силы инерции, возникающие при работе телескопа при направлении его на объект, так, чтобы его можно было бы использовать в космическом пространстве, где телескоп, установленный на космической станции, не создавал бы силы инерции,
(b) сконструировать устройство управления движением оборудования, имеющее простую конструкцию, с помощью которого оборудование, такое как телескоп или антенна, могло бы передвигаться для направления на объект, и это движение выполнялось бы точно в заданном направлении, и
(c) разработать астрономический телескоп-рефлектор, имеющий такую конструкцию конденсора, которая не экранировала бы входящий свет, благодаря чему можно было бы в целом увеличить фокусирующую способность.
Для достижения целей, указанных в пункте (а), приведенном выше, настоящее изобретение предусматривает средства, описанные в пунктах (1)-(10):
(1) Телескоп, содержащий корпус телескопа и отражающее зеркало, конденсор и камеру или окуляр, установленные в корпусе телескопа, отличающийся тем, что он дополнительно содержит противовес, который движется, совершая вращательное движение одновременно с вращательным движением корпуса телескопа, который направляется на объект наблюдения, так, что сила инерция, вызываемая вращательным движением корпуса телескопа, может быть компенсирована.
(2) Телескоп, содержащий корпус телескопа и отражающее зеркало, конденсор и камеру или окуляр, установленные в корпусе телескопа, отличающийся тем, что отражающее зеркало, конденсор и камера или окуляр взаимно соединены друг с другом так, что при направлении на наблюдаемый объект отражающее зеркало движется вместе с конденсором и камерой или окуляром.
(3) Телескоп, содержащий корпус телескопа и отражающее зеркало, конденсор и камеру или окуляр, установленные в корпусе телескопа, отличающийся тем, что отражающее зеркало и блок из конденсора и камеры или окуляра движутся независимо друг от друга.
(4) Телескоп по пунктам (2) или (3), приведенным выше, отличающийся тем, что множество противовесов установлены на внешней окружности нижней части отражающего зеркала.
(5) Телескоп по пунктам (2) или (3), приведенным выше, отличающийся тем, что множество противовесов установлены на внешней окружности части основания, на которой установлено отражающее зеркало.
(6) Телескоп по пунктам (2) или (3), приведенным выше, отличающийся тем, что противовес установлен между отражающим зеркалом и частью основания, на которой установлено отражающее зеркало так, что нижняя поверхность отражающего зеркала и часть основания соединены друг с другом, и противовес движется в направлении, противоположном движению отражающего зеркала.
(7) Телескоп по пунктам (4) или (5), приведенным выше, отличающийся тем, что каждый из противовесов установлен через силовой привод.
(8) Телескоп по пунктам (5) или (6), приведенным выше, отличающийся тем, что множество противовесов горизонтальной компоненты установлено на верхней поверхности части основания.
(9) Телескоп по пункту (1), приведенному выше, отличающийся тем, что противовес содержит противовес, предназначенный для компенсации силы инерции, создаваемой, когда один из краев корпуса телескопа наклоняется по направлению к объекту наблюдения, выполняя при этом вращательное движение вверх и вниз, и противовес, предназначенный для компенсации силы инерции, создаваемой, когда корпус телескопа, при таком наклоне, вращается вокруг оси, перпендикулярной к части основания, на которой установлен корпус телескопа.
(10) Телескоп по п.(9), приведенному выше, отличающийся тем, что противовес для компенсации силы инерции, создаваемой, когда один из краев корпуса телескопа выполняет вращательные движения вверх и вниз, установлен на одном из концов рычага и рычаг имеет такую конструкцию, которая позволяет ему вращаться.
Таким образом, когда телескоп вращается для направления на объект наблюдения, такой, как звезда, возникают значительные силы инерции. Когда такой телескоп установлен на космической станции, эта силы инерции воздействует на саму станцию, создавая серьезное воздействие на окружающую среду в условиях микрогравитации. В связи с этим, возникновение таких сил инерции является недопустимым. В изобретении (1), приведенном выше, такая сила инерции компенсируется противоположно направленной силой, создаваемой противовесом и, в связи с этим, телескоп в соответствии с настоящим изобретением может применяться на космической станции. Кроме того, как указано в изобретении (9), приведенном выше, используется противовес двух типов для компенсации сил инерции, вызываемых вращательным движением вверх и вниз края телескопа, и для компенсации сил инерции, вызываемых вращением корпуса телескопа вокруг оси, перпендикулярной части основания, что позволяет эффективно компенсировать возникающие силы инерции.
В изобретении (2), приведенном выше, отражающее зеркало, конденсор и камера или окуляр имеют такую конструкцию, что они передвигаются как единое целое для отслеживания звезд и т.д., кроме того, в изобретении (3), приведенном выше, отражающее зеркало и блок конденсора и камеры или окуляра имеют такую конструкцию, что они могут передвигаться независимо друг от друга, и при применении любой из этих конструкций не требуется перемещать весь корпус телескопа для отслеживания объекта наблюдения, и, следовательно, вес движущихся частей может быть уменьшен.
В изобретениях (4) и (5), приведенных выше, множество противовесов установлены так, что они компенсируют силу инерции, которая возникает при движении отражающего зеркала, и, кроме того, благодаря изобретениям (2) и (3), приведенным выше, которые позволяют снизить вес движущихся частей, сила инерции таких движущихся частей также может быть скомпенсирована. Кроме того, как указано в изобретениях (6) и (7), приведенных выше, техника крепления противовесов разработана настолько уникально, что она расширяет диапазон их применения, а также в соответствии с изобретением (8), приведенным выше, добавляются противовесы горизонтальной компоненты, благодаря которым сила инерции может быть надежно скомпенсирована.
Кроме того, для достижения цели, указанной в пункте (b), приведенном выше, в настоящем изобретении предусмотрены следующие средства (11)-(13):
(11) Устройство управления движением оборудования, предназначенное для перемещения корпуса оборудования, которое требуется направить на объект, отличающееся тем, что оно содержит корпус оборудования, имеющий нижнюю поверхность изогнутой формы; основание корпуса оборудования, на котором установлена нижняя часть корпуса оборудования, и которое имеет нижнюю поверхность, выполненную из магнитного материала, и имеет изогнутую форму, взаимодополняющую по форме изогнутую форму нижней поверхности корпуса оборудования; станину основания, имеющую верхнюю поверхность изогнутой формы, взаимодополняющую изогнутую форму нижней поверхности основания корпуса оборудования так, что нижняя поверхность основания корпуса оборудования может прилегать к верхней поверхности станины основания, будучи приподнятой над ней; множество катушек стационарной стороны, установленных на всей части верхней поверхности станины основания; множество катушек, предназначенных для передвижения, установленных в радиальных направлениях, проходящих от центра верхней поверхности станины основания; и средство управления, предназначенное для возбуждения катушек стационарной стороны и катушек, предназначенных для передвижения, чтобы приподнимать основание корпуса оборудования над станиной основания, и для управления движением основания корпуса оборудования.
(12) Устройство управления движения оборудованием, как указано в пункте (11), приведенном выше, отличающееся тем, что корпус оборудования представляет собой корпус телескопа, который содержит отражающее зеркало, которое имеет изогнутую форму на нижней поверхности корпуса телескопа, конденсор, установленный в верхней части корпуса телескопа и камеру или окуляр, установленные непосредственно ниже конденсора, или корпус оборудования представляет собой корпус антенны, который содержит антенну, установленную в центральной части корпуса антенны и, нижняя поверхность которой сформирована так, что имеет изогнутую форму.
(13) Устройство управления движением оборудования, как указано в пункте (11) или (12), приведенных выше, отличающееся тем, что станина основания имеет пространство, сформированное в ней, которое имеет изогнутую форму, взаимодополняющую изогнутую форму верхней поверхности станины основания, и это пространство имеет постоянную высоту; противовес, имеющий нижнюю поверхность, изготовленную из магнитного материала, установлен с возможностью движения в этом пространстве; множество катушек стационарной стороны установлены по всей части нижней поверхности пространства; множество катушек, предназначенных для движения, установлены в радиальных направлениях, проходящих из центра нижней поверхности пространства; и средство управления управляет возбуждением катушек стационарной стороны и катушек, предназначенных для движения, так, что оба набора этих катушек могут возбуждаться одновременно, приподнимая, таким образом, противовес над нижней поверхностью пространства и передвигая противовес в направлении, противоположном движению основания корпуса оборудования.
Таким образом, изобретение (11), приведенное выше, может применяться в устройстве управления движением оборудования, и изобретение (12), приведенное выше, может применяться в устройстве управления движением телескопа или антенны. В изобретениях (11) и (12), когда средство управления возбуждает катушки стационарной стороны, установленные на верхней поверхности станины основания, корпус оборудования приподнимается магнитным полем над верхней поверхностью станины основания благодаря силе отталкивания между магнитным материалом основания корпуса оборудования и катушками стационарной стороны. Затем, когда средство управления возбуждает катушки, предназначенные для передвижения, установленные в местоположении, в которое необходимо переместить корпус оборудования, среди множества катушек, предназначенных для передвижения, приподнятый корпус оборудования легко перемещается в требуемое местоположение благодаря силам притяжения между магнитным материалом нижней поверхности основания корпуса оборудования и соответственно возбужденными катушками, предназначенными для передвижения. Когда корпус оборудования передвигается в требуемое местоположение, средство управления прекращает возбуждение катушек стационарной стороны, и при этом основание корпуса оборудования упирается в верхнюю поверхность станины основания, фиксируясь на ней. При этом в установленном положении может производиться наблюдение за объектом наблюдения.
В изобретении (13), приведенном выше, одновременно с движением корпуса оборудования, как указано выше, противовес передвигается в направлении, противоположном направлению движения корпуса оборудования, благодаря чему сила инерции, вызванная движением корпуса оборудования, компенсируется. То есть, средство управления возбуждает катушки стационарной стороны нижней поверхности пространства станины основания, чтобы приподнять противовес над нижней поверхностью пространства с помощью силы отталкивания между магнитным материалом противовеса и катушками стационарной стороны. Одновременно, средство управления возбуждает катушки, предназначенные для передвижения, нижней поверхности пространства, установленные в местоположении, противоположном местоположению, в которое необходимо переместить корпус оборудования, благодаря чему противовес, под действием сил притяжения, передвигается в направлении, противоположном направлению движения корпуса оборудования. Таким образом, создаваемая сила инерции может быть скомпенсирована.
При вращательном движении телескопа во время направления его на объект наблюдения такой, как звезда, или при движении антенны возникают большие силы инерции. Если телескоп или антенна установлены на космической станции, эти силы инерции передаются на саму станцию, создавая серьезное воздействие на окружающее пространство в условиях микрогравитации и, по этой причине, возникновение таких сил инерции является недопустимым. В соответствии с изобретением (13) такая сила инерции компенсируется силой противовеса, воздействующей в противоположном направлении, при этом указанное устройство управления движением оборудования может также использоваться на космической станции.
Кроме того, для достижения цели, указанной в пункте (с), приведенном выше, настоящее изобретение предусматривает использование средства, соответствующего пунктам (14)-(16):
(14) Телескоп-рефлектор, содержащий корпус телескопа цилиндрической формы, вогнутое зеркало, установленное на нижней поверхности корпуса телескопа, конденсор, установленный над вогнутым зеркалом, и камеру или окуляр, установленные ниже конденсора, и имеет такую конструкцию, что свет, входящий в верхнюю часть корпуса телескопа отражается вогнутым зеркалом так, что он фокусируется на конденсоре и затем попадает в камеру или окуляр, отличающийся тем, что это вогнутое зеркало изготовлено таким образом, что оно имеет угол отражения света, регулируемый с помощью силового привода; в средней части боковой стенки корпуса телескопа сформирована часть отверстия; конденсор расположен за пределами этой части отверстия так, что весь свет, попадающий в верхнюю часть корпуса телескопа, может отражаться вогнутым зеркалом и может приниматься конденсором через эту часть отверстия; и камера или окуляр установлены вблизи к части отверстия так, что они принимают свет, поступающий от конденсора.
(15) Телескоп-рефлектор по пункту (14), приведенному выше, отличающийся тем, что угол отражения света таким вогнутым зеркалом, определяется заранее, и вогнутое зеркало неподвижно установлено на нижней поверхности корпуса телескопа так, что оно отражает свет под этим, заранее установленным углом.
(16) Телескоп-рефлектор по п.(14), приведенному выше, отличающийся тем, что форма поверхности вогнутого зеркала выбирается таким образом, чтобы разность оптических путей до конденсора была минимальной, а форма вогнутой поверхности конденсора выбирается произвольно.
В телескопе-рефлекторе в соответствии с изобретениями (14) и (16), приведенными выше, конденсор устанавливается за пределами части отверстия, которая сформирована в средней части боковой стенки корпуса телескопа. При этом свет, поступающий в верхнюю часть корпуса телескопа, не экранируется конденсором, и весь свет, входящий в телескоп, отражается вогнутым зеркалом. Угол отраженного света регулируется движением вогнутого зеркала, которое приводится механизмом привода, и этот угол устанавливается таким образом, что все количество отраженного света проходит через часть отверстия так, что оно отражается конденсором. При этом все количество света, поступающего в верхнюю часть корпуса телескопа, отражается вогнутым зеркалом и принимается конденсором для последующего приема камерой или окуляром, которые расположены непосредственно ниже конденсора, и при этом не происходит снижение фокусирующей способности света.
В изобретении (15), приведенном выше, угол отражения света вогнутым зеркалом, регулируется так, чтобы получилась заранее определенная величина с тем, чтобы все количество отраженного света могло проходить через часть отверстия в боковой стенке корпуса телескопа, и вогнутое зеркало неподвижно закреплено на нижней поверхности корпуса телескопа так, что оно отражает свет под этим, заранее определенным углом. При этом, когда телескоп правильно направлен на объект наблюдения, все количество света, входящего в верхнюю часть корпуса телескопа, может быть принято конденсором, и, таким образом, можно не использовать механизм привода и регулировку вогнутого зеркала.
Перечень фигур и чертежей
На фиг.1 представлен вид в перспективе конструкции космического телескопа по первому варианту воплощения в соответствии с настоящим изобретением.
На фиг.2 представлен вид в перспективе конструкции космического телескопа по второму варианту воплощения настоящего изобретения.
На фиг.3 представлен вид в перспективе конструкции космического телескопа по третьему варианту воплощения в соответствии с настоящим изобретением.
На фиг. 4 представлен вид конструкции космического телескопа по четвертому варианту воплощения в соответствии с настоящим изобретением, причем фиг. 4(а) представляет вид сбоку, и фиг.4(b) представляет вид со стороны, показанной стрелками А-А, изображенными на фиг.4(а).
На фиг. 5 представлен подробный вид части отражающего зеркала телескопа по фиг. 4, причем фиг.5 (а) представляет вид сбоку, и фиг.5(b) представляет вид в плане.
На фиг.6 изображен вид, представляющий один из примеров противовеса телескопа по фиг. 4, причем фиг.6(а) изображает вид сбоку, и фиг.6(b) представляет вид в плане.
На фиг. 7 изображен вид сбоку другого примера противовеса телескопа по фиг.4.
На фиг.8 представлен вид, поясняющий примеры работы противовеса по фиг. 5, причем на фиг.8(а) представлен пример с использованием шкива, и на фиг. 8(b) представлен пример с использованием силового привода.
На фиг. 9 представлен вид, поясняющий примеры применения противовеса по фиг. 8, к которым добавлен горизонтальный компонент противовеса, причем фиг. 9(а) представляет пример с использованием троса, и фиг.9(b) представляет пример с использованием силового привода.
На фиг. 10 представлен вид конструкции космического телескопа по пятому варианту воплощения в соответствии с настоящим изобретением, причем на фиг. 10(а) представлен вид сбоку и на фиг.10(b) представлен вид со стороны, обозначенной стрелками В-В по фиг.10(а).
На фиг.11 представлен вид в поперечном сечении примера, в котором на телескопе установлено устройство управления движением оборудования по шестому варианту воплощения телескопа в соответствии с настоящим изобретением.
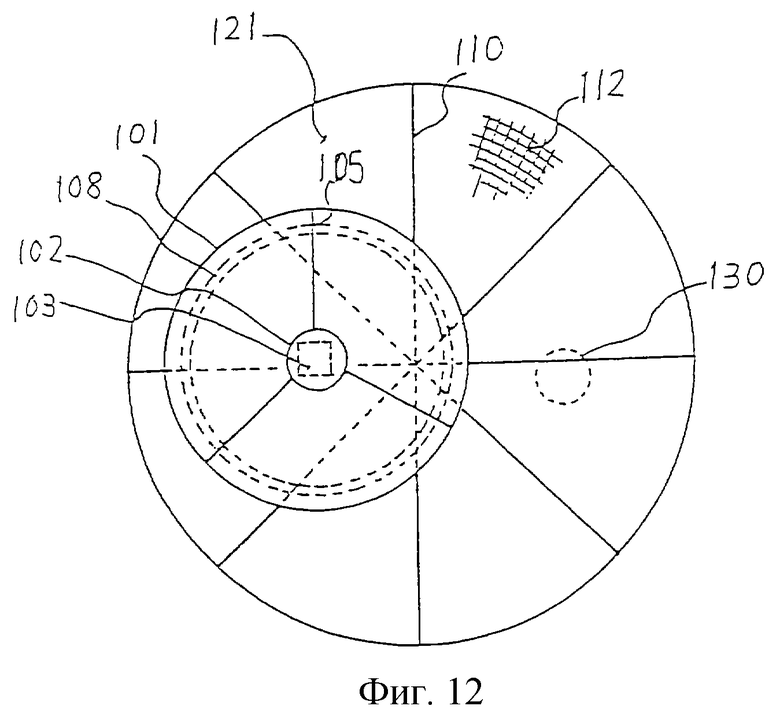
На фиг.12 представлен вид со стороны, обозначенной стрелками А-А по фиг. 11.
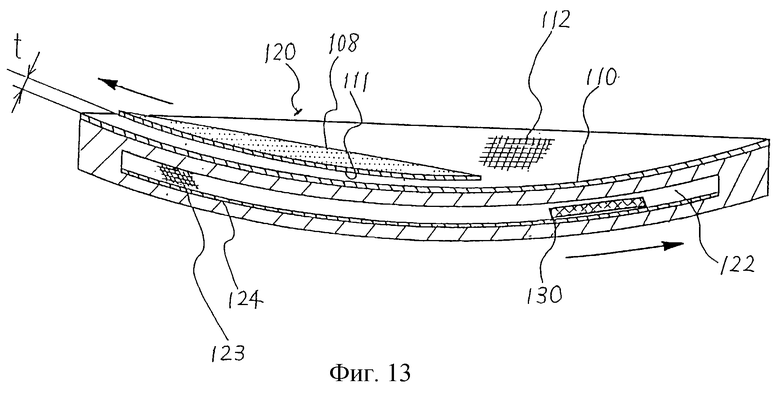
На фиг. 13 представлен подробный вид поперечного сечения станины основания по шестому варианту воплощения, который представлен на фиг.11.
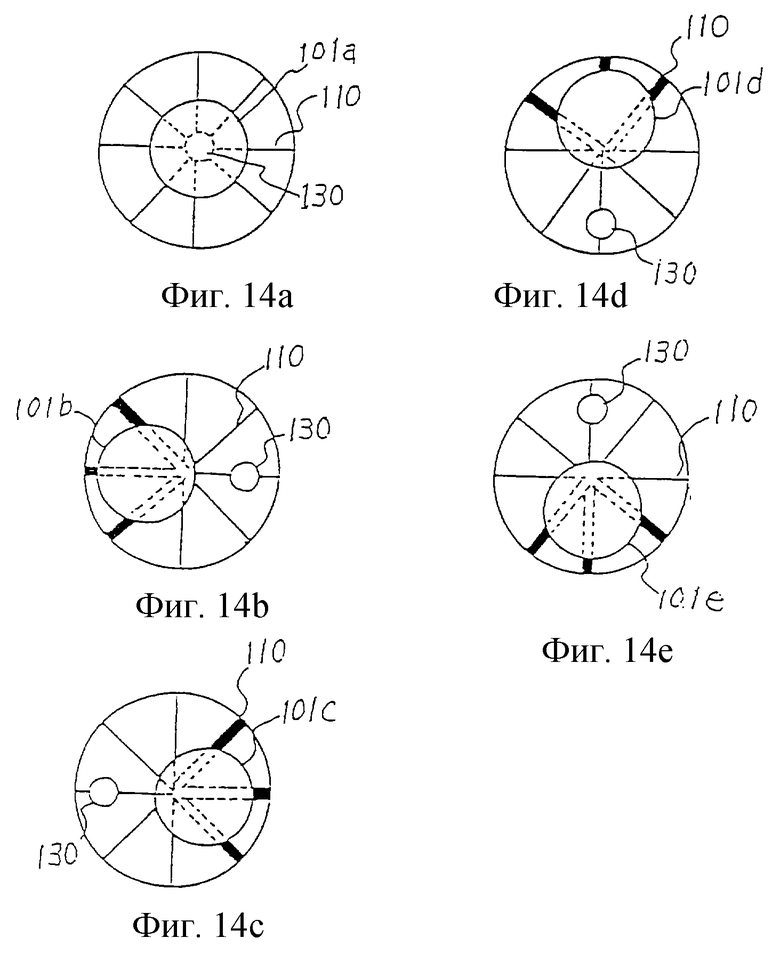
На фиг.14 представлен вид, поясняющий функции телескопа по шестому варианту воплощения, который представлен на фиг.11, причем на фиг.14(а) изображено состояние, когда телескоп находится в центральном положении, и на фигурах 14(b)-(е) изображены состояния, когда телескоп смещен в различные положения.
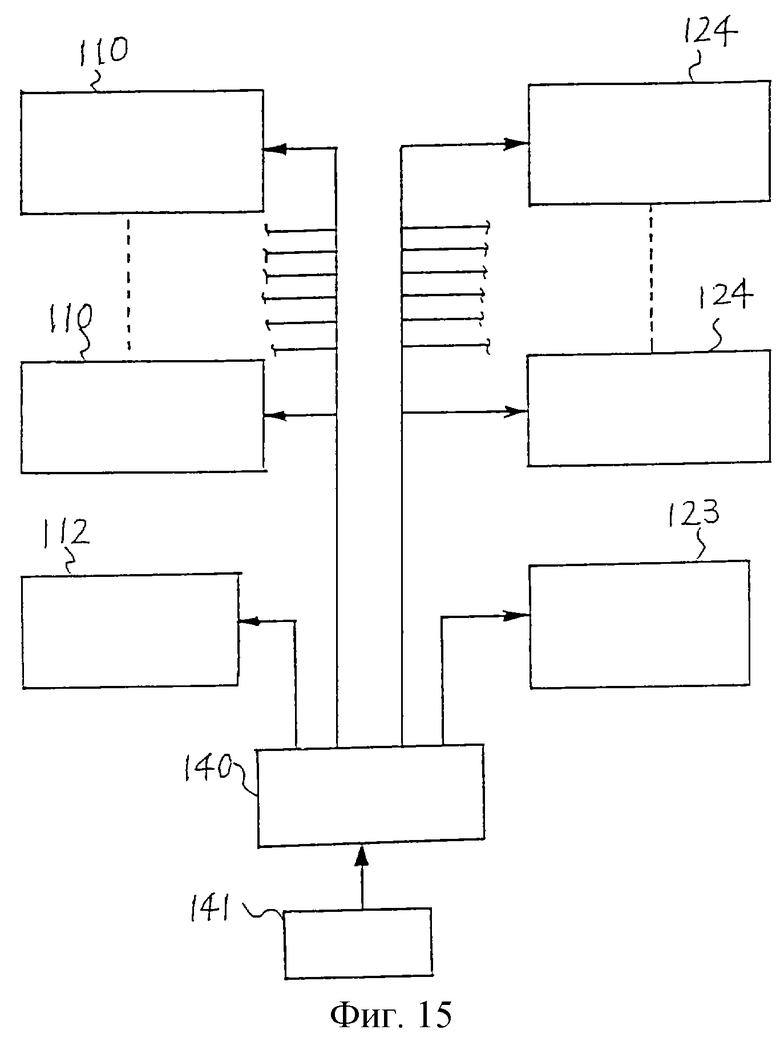
На фиг. 15 изображена схема управления телескопа по шестому варианту воплощения, изображенному на фиг.11.
На фиг.16 представлен вид в поперечном сечении, изображающий устройство управления движением оборудования по седьмому варианту воплощения в соответствии с настоящим изобретением, причем устройство управления движением оборудования используется для управления движением антенны.
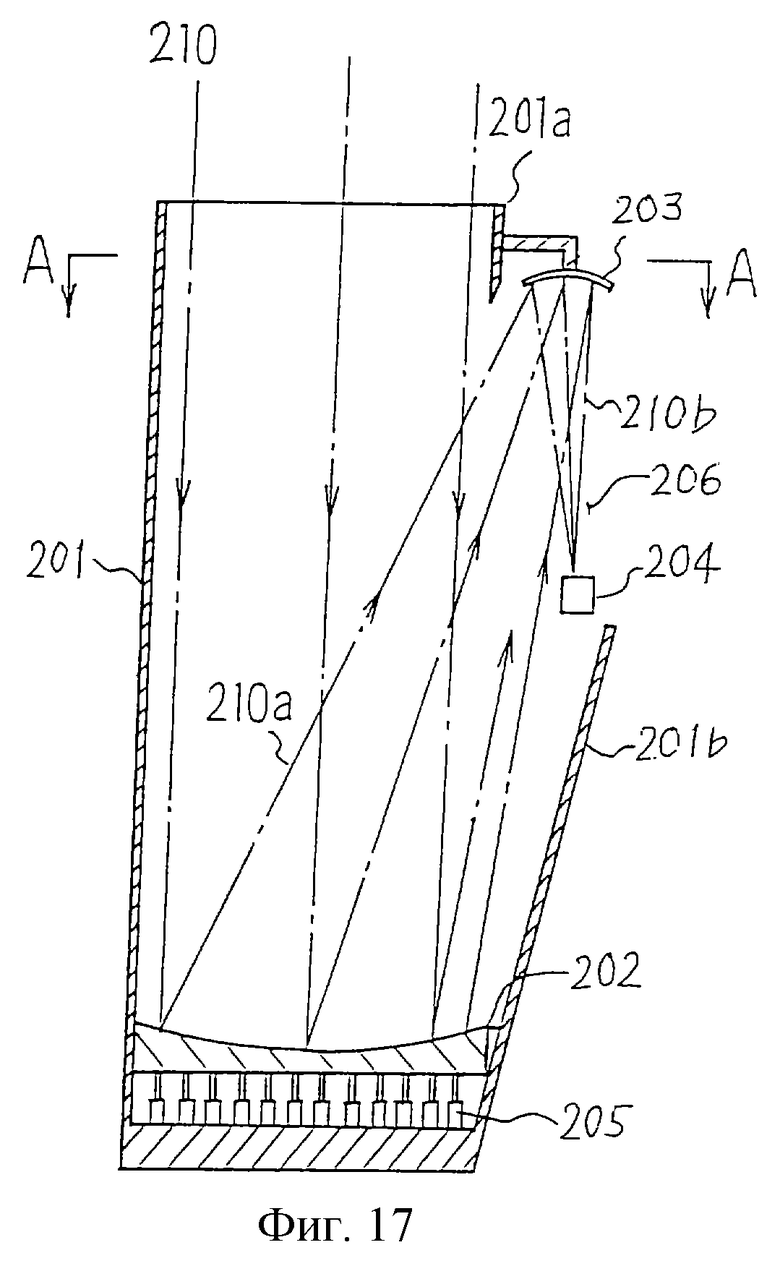
На фиг. 17 изображен вид конструкции в поперечном сечении астрономического телескопа-рефлектора по восьмому варианту воплощения в соответствии с настоящим изобретением.
На фиг.18 изображен вид в плане поперечного сечения по линии А-А, изображенной на фиг.17.
На фиг.19 изображен вид в поперечном сечении астрономического телескопа-рефлектора по девятому варианту воплощения в соответствии с настоящим изобретением.
На фиг. 20 изображен вид конструкции в поперечном сечении телескопа-рефлектора известного уровня техники.
Сведения, подтверждающие возможность осуществления изобретения
Ниже будут описаны конкретные варианты воплощения в соответствии с настоящим изобретением, со ссылкой на чертежи.
На фиг.1 представлен вид в перспективе конструкции космического телескопа по первому варианту воплощения в соответствии с настоящим изобретением.
Цифрой 1 обозначен корпус телескопа цилиндрической формы, в котором установлены отражающее зеркало, конденсор, камера и т.п., хотя они и не показаны. Цифрами 2а, 2b обозначены держатели корпуса телескопа, соответственно. Каждый из держателей 2а, 2b корпуса телескопа имеет на одном из своих концов ось 3, которая предназначена для установки корпуса телескопа 1 с возможностью вращения на оси 3, и их другой конец прикреплен к основанию 4 для установки корпуса 1 телескопа на основании 4.
На обоих концах оси 9 закреплены блоки 5а, 5b противовеса (блок 5b на чертеже не изображен), и эти блоки 5а, 5b противовеса вместе с осью 9 установлены с возможностью вращения на оси 3 с обеих сторон корпуса 1 телескопа. Каждый из блоков 5а, 5b противовеса содержит произвольное количество наборов противовесов 6а, 6b, которые установлены по окружности напротив друг друга. Кроме того, вокруг основания 4 установлен с возможностью вращения блок 7 противовеса тороидальной формы. Блок 7 противовеса содержит произвольное количество наборов противовесов 8а, 8b, установленных по окружности напротив друг друга так, что блок 7 противовеса, вместе с противовесами 8а, 8b, может вращаться вокруг основания 4. Цифрой 10 обозначен привод вращения, предназначенный для управления вращением противовесов 6а, 6b.
Телескоп приведенной выше конструкции вращается вокруг вертикальной оси Y, проходящей вдоль центральной оси основания 4, и вокруг горизонтальной оси X, проходящей вдоль центральной оси 3, соответственно, так, что он может менять свое положение по направлению к объекту в космическом пространстве. Когда корпус телескопа 1, который имеет более тяжелый передний или дальний край и более легкий задний или ближний край, движется вокруг оси Х и оси Y для направления на объект, он наклоняется на переднем краю, создавая значительную силу инерции. Эта сила инерции воздействует на космическую станцию, на которой установлен телескоп, создавая значительное воздействие на положение космической станции. В связи с этим такая сила инерции должна быть устранена.
В настоящем первом варианте воплощения, когда корпус 1 телескопа вращается вокруг оси X, в направлении α1, как показано, например, на фиг.1, привод 10 вращения одновременно быстро вращает противовесы 6а, 6b в направлении α2, которое противоположно направлению α1, так, что вырабатываемая сила инерции компенсируется. Поскольку противовесы 6а, 6b имеют произвольное количество наборов, установленных по окружности напротив друг друга, как указано выше, когда они вращаются в противоположном направлении с высокой скоростью, может быть получена сила, воздействующая в направлении, компенсирующем силу инерции корпуса 1 телескопа.
Величина силы инерции может регулироваться с помощью вращения противовесов 6а, 6b так, что вся сила инерции, вызванная вращением корпуса 1 телескопа вокруг оси X, может быть скомпенсирована.
Для вращения противовесов 6а, 6b, хотя и это не показано на чертежах, может быть установлена конструкция, предназначенная для вращения их концентрично оси 3, независимо от корпуса 1 телескопа, и эта конструкция представляет собой, например, конструкцию, в которой двигатель, установленный в приводе 10 вращения, вращает ось 9, на которой закреплены противовесы 6а, 6b, или диск, содержащий противовесы 6а, 6b, установленные по его окружности, вращается по принципу линейного двигателя.
Управление таким вращением противовесов 6а, 6b может быть легко выполнено путем измерения скорости вращения корпуса 1 телескопа и управлением вращения двигателя так, чтобы оно соответствовало измеренной скорости.
При вращении корпуса 1 телескопа вокруг оси Y, когда корпус 1 телескопа вместе с основанием 4 вращается в направлении β1, как показано, например, на фиг.1, противовесы 8а, 8b вращаются в направлении β2, которое противоположно направлению β1, так, чтобы сила инерции, которая вызывается вращением в направлении β1, воздействующая на основание установки или на космическую станцию, могла быть скомпенсирована. Поскольку противовесы 8а, 8b установлены в блоке 7 противовеса с произвольным количеством наборов, установленных по окружности и напротив друг друга, как отмечено выше, когда они вращаются в обратном направлении по отношению к направлению вращения корпуса 1 телескопа, может быть получена сила инерции, воздействующая в направлении, компенсирующем силу инерции корпуса 1 телескопа 1. Кроме того, для вращения противовесов 8а, 8b может быть применена конструкция, использующая принцип линейного двигателя, как указано выше.
Таким образом, если описанный выше космический телескоп будет установлен на космическую станцию, он может работать без возникновения сил инерции, и даже, если он будет установлен на земле, может легко осуществляться управление его направлением.
На фиг.2 представлен вид в перспективе конструкции космического телескопа по второму варианту воплощения в соответствии с настоящим изобретением. На фиг.2 части или компоненты, обозначенные цифрами 1-4, 7 и 8 являются такими же, как и изображенные на фиг.1, причем их описание не повторяется, и представленные части и компоненты настоящего второго варианта воплощения, которые обозначены цифрами 11-15, будут описаны ниже.
На фиг.2 корпус 1 телескопа установлен на оси 3 с возможностью вращения вокруг нее, и рычажный привод 14, предназначенный для вращения рычагов, независимо от корпуса 1 телескопа, соединен с осью 3. На обоих концах соединительной оси 15 закреплены центральные части рычагов 11а, 11b, и эта соединительная ось 15 соединена приводом 14 рычагов. Конструктивно рычаги 11а, 11b на обоих концах снабжены противовесами 12а, 12b и 13а, 13b, соответственно, которые сформированы как единая деталь с соединительной осью 15, которая может вращаться приводом 14 рычагов вокруг оси X. Другие части конструкции являются такими же, как и в первом варианте воплощения, изображенном на фиг. 1.
В телескопе в соответствии с настоящим вторым вариантом воплощения, конструкция которого описана выше, когда корпус 1 телескопа вращается вокруг оси X, в направлении, например, α1, привод 14 рычагов вращает соединительную ось 15 вместе с рычагами 11а, 11b в направлении α2, которое противоположно направлению α1. Привод 14 рычагов имеет функцию определения скорости вращения и угла поворота корпуса 1 телескопа, и рычаги 11а, 11b управляются таким образом, что они устанавливаются соответственно измеренным скорости и углу. Таким образом, сила инерции, вызванная вращением корпуса 1 телескопа вокруг оси X, компенсируется силой, воздействующей в противоположном направлении, и при этом не возникает случай, когда выработанная сила инерции передается на сторону оборудования, на котором установлен телескоп, например, на космическую станцию. Кроме того, сила инерции, вызванная вращением корпуса 1 телескопа вокруг оси Y, компенсируется силой, вызванной вращением в противоположном направлении противовесов 8а, 8b, которые имеют такую же функцию, как описана в отношении первого варианта воплощения, изображенного на фиг.1.
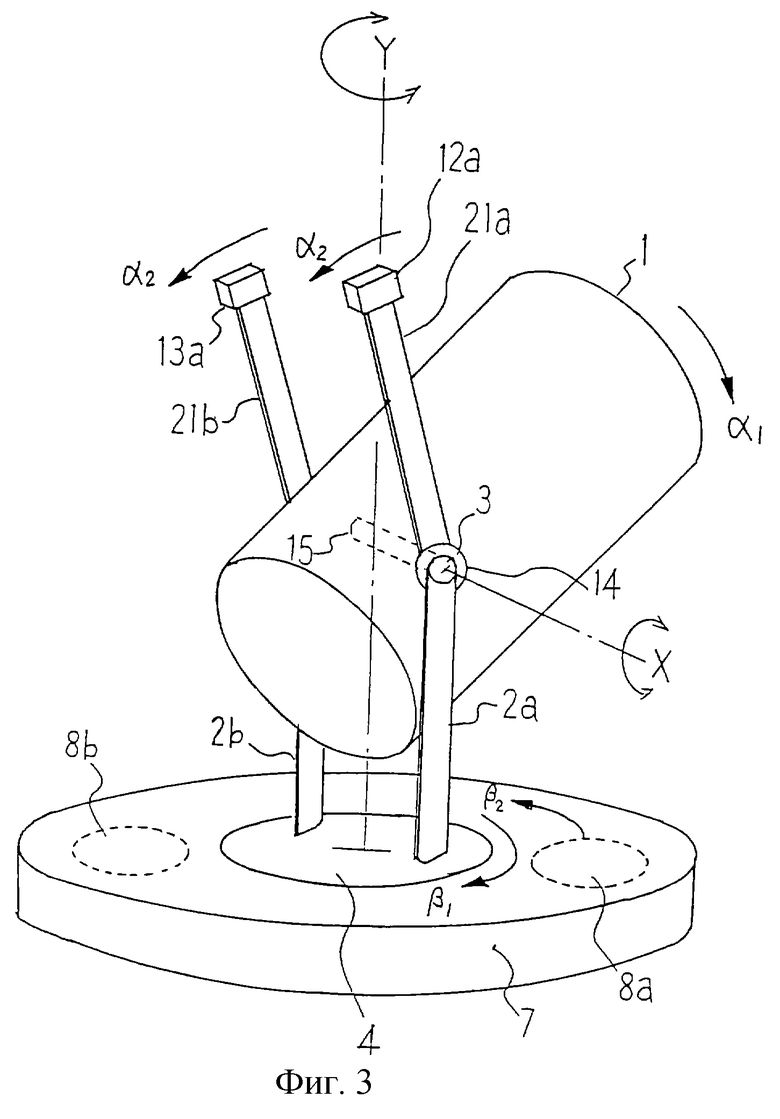
На фиг.3 изображен вид в перспективе конструкции космического телескопа по третьему варианту воплощения в соответствии с настоящим изобретением. Характерной особенностью настоящего третьего варианта воплощения, изображенного на фиг.3, является конструкция, в которой нижние части рычагов 11а, 11b, изображенные на фиг.2, срезаны, а противовесы 12b, 13b, установленные на нижних концах, удалены. Другие части такие же, как изображены во втором варианте воплощения на фиг.2.
В настоящем третьем варианте воплощения рычаги 21а, 21b, установленные с обеих сторон корпуса 1 телескопа, сформированы как единая деталь с соединительной осью 15 и вращаются с помощью привода 14 рычагов в направлении α2, которое противоположно направлению α1 вращения корпуса 1 телескопа. Таким образом, сила инерции корпуса 1 телескопа вокруг оси Х компенсируется так же, как и в случае второго варианта воплощения, который изображен на фиг.2. По сравнению с конструкцией по фиг.2, настоящий третий вариант воплощения имеет преимущество, состоящее в том, что количество деталей противовесов уменьшено, что, таким образом, упрощает конструкцию рычагов.
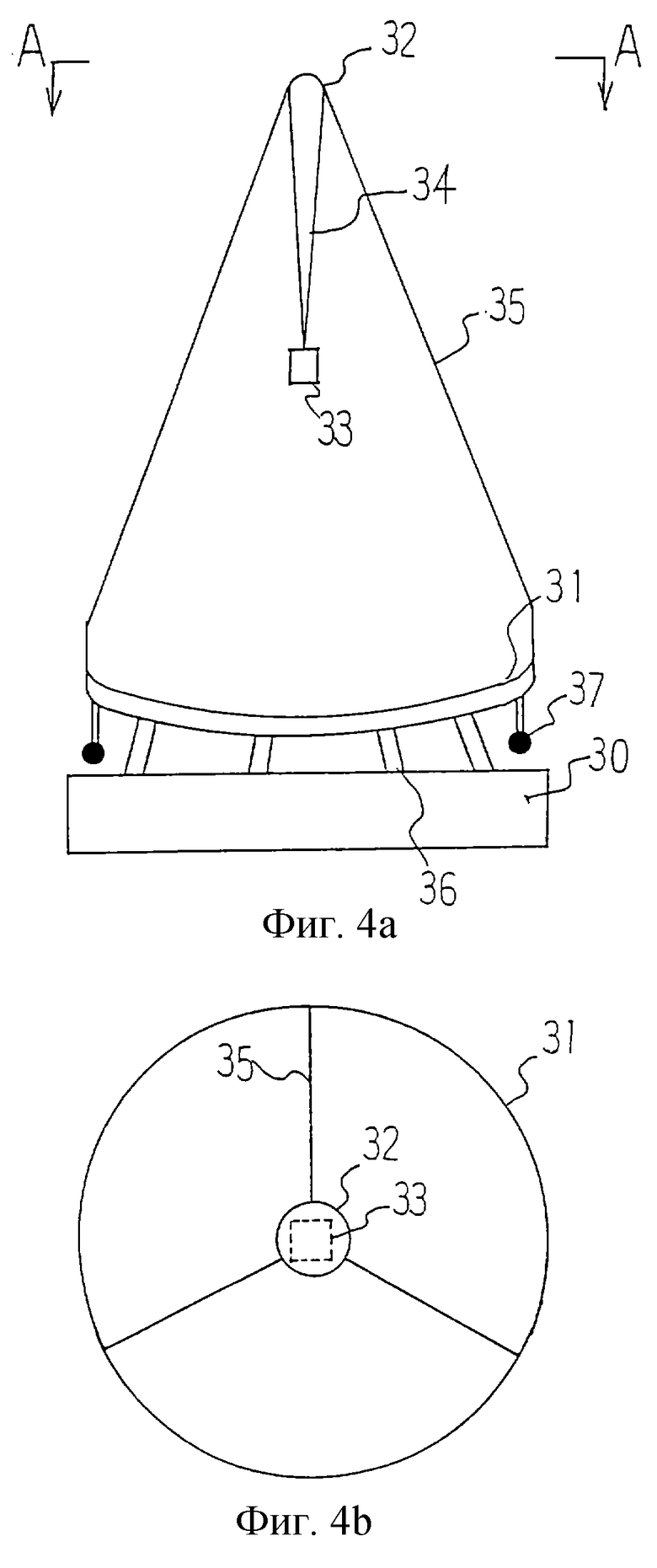
На фиг.4 изображен вид конструкции космического телескопа по четвертому варианту воплощения в соответствии с настоящим изобретением, причем фиг.4(а) изображает вид сбоку, и фиг.4(b) представляет вид со стороны, обозначенной стрелками А-А на фиг.4(а). На фиг.4 цифрой 30 обозначено основание. Над основанием 30 установлено отражающее зеркало 31 с множеством приводов 36, расположенных между основанием 30 и отражающим зеркалом 31. Цифрой 37 обозначен противовес, и множество частей противовеса 37 подвешены по краю окружности отражающего зеркала 31. Цифрой 32 обозначен конденсор, который установлен на трех частях элемента 35 крепления конденсора, которые проходят от внешней окружности отражающего зеркала 31. Цифрой 33 обозначена камера, которая поддерживается элементом 34 крепления камеры, установленным непосредственно ниже конденсора 32.
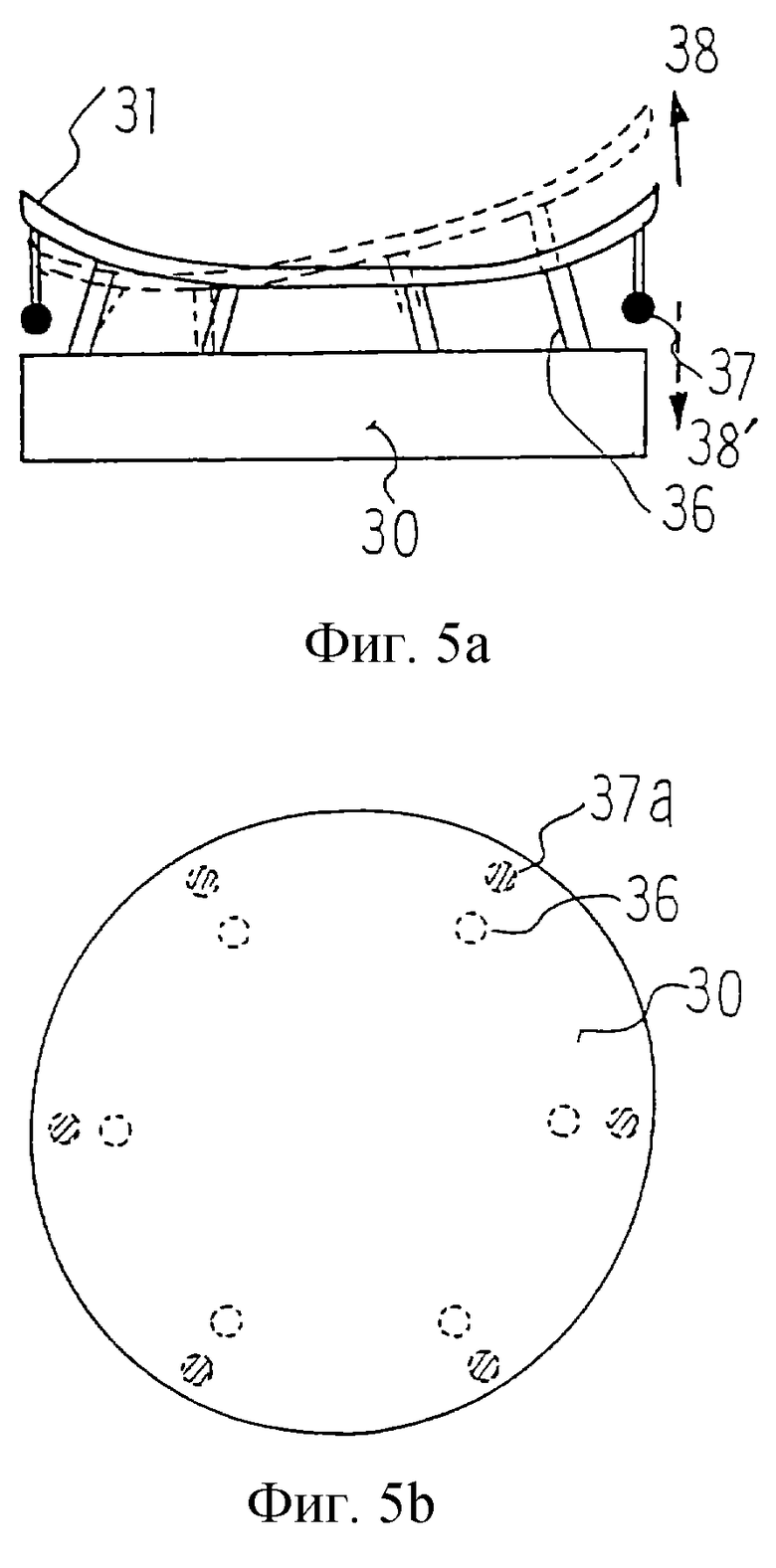
На фиг.5 изображен подробный вид, представляющий часть отражающего зеркала 31, приводы 36 и противовесы 37 по четвертому варианту воплощения, который изображен на фиг.4, причем фиг.5(а) изображает вид сбоку, и фиг.5(b) изображает вид в плане. Множество приводов 36 установлены по внешней части окружности основания 30 так, что отражающее зеркало 31 может передвигаться благодаря приводам 36 в заданном направлении для отслеживания звезд и т.п. Противовесы 37 имеют такую конструкцию, что могут передвигаться вверх и вниз, когда внешняя часть отражающего зеркала 31 движется вверх и вниз с помощью приводов 36, причем противовесы 37 этой части передвигаются вверх и вниз в направлении, противоположном направлению движения отражающего зеркала 31 так, что может быть скомпенсирована сила инерции, вызванная движением частей конструкции отражающего зеркала 31, конденсора 32 и камеры 33, которые соединены с отражающим зеркалом 31. В примере, изображенном на фиг.5, когда правая сторона отражающего зеркала 31 движется вверх, как показано цифрой 38, противовес 37 этой части движется вниз, как показано цифрой 38'.
В настоящем четвертом варианте воплощения, как описано выше, отражающее зеркало 31, конденсор 32 и камера 33 вместе с элементом 35 крепления конденсора и элементом 34 крепления камеры удерживаются совместно приводами 36 для отслеживания звезд и т.п. и сила их инерции компенсируется противовесами, и благодаря этому окружающая среда микрогравитации космической станции, на которой установлен телескоп, не нарушается.
На фиг. 6 изображен вид, представляющий один из примеров варианта противовесов 37 по четвертому варианту воплощения, который изображен на фиг.4, причем фиг.6(а) представляет вид сбоку, и фиг.6(b) представляет вид в плане. В этом примере множество противовесов 37а, каждый из которых имеет такую же структуру, как и противовес 37, изображенный на фиг.5, установленный по части внешней окружности основания 30, а конструкция других частей такая же, как и в четвертом варианте воплощения, который изображен на фиг.5. На фиг.6, когда часть отражающего зеркала 31 движется вверх, как показано цифрой 38, противовесы 37а этой части движутся вниз, как показано цифрой 38' и, благодаря этому, вырабатываемая сила инерции компенсируется.
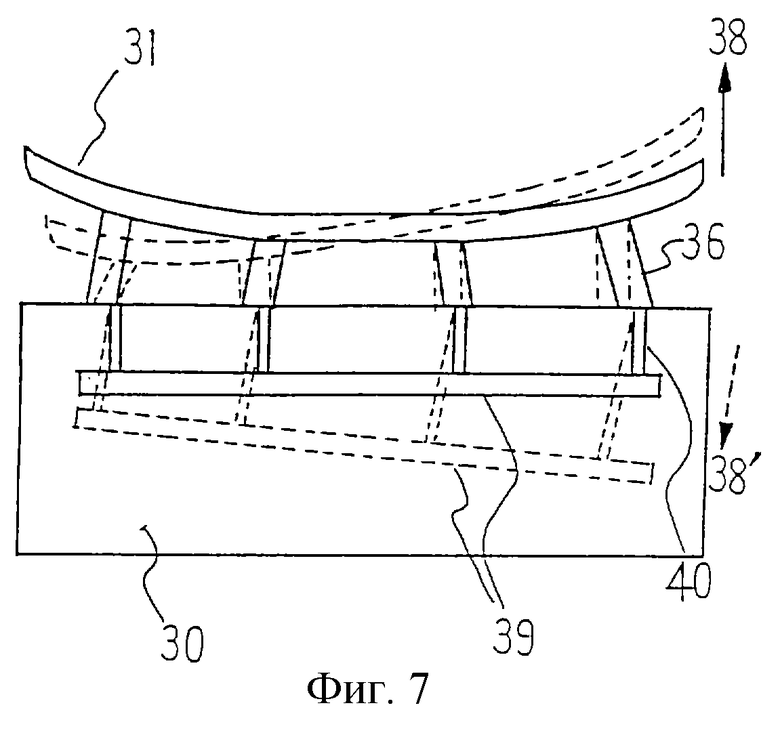
На фиг.7 представлен вид сбоку, изображающий другой вариант примера противовесов 37 по фиг.5. В данном примере противовес 39 установлен внутри основания 30, и множество приводов 40 противовеса расположены между верхней стенкой основания 30 и противовесом 39. Когда правая сторона отражающего зеркала 31 движется вверх, как показано цифрой 38, приводы 40 противовеса этой части одновременно движутся так, что они удлиняются с большей силой привода, чем у других приводов 40 противовеса так, что противовес 39 движется в направлении, обратном направлению движения отражающего зеркала 31, то есть вниз, как показано цифрой 38', и вырабатываемая сила инерции компенсируется.
На фиг.8 представлен вид, поясняющий работу примеров противовесов 37 по четвертому варианту воплощения, причем фиг.8(а) представляет пример с использованием шкива, и фиг.8(b) представляет пример с использованием силового привода. На фиг.8(а) противовес 37 подвешен на элементе 41 крепления и соединен с отражающим зеркалом 31 через шкив 42. С помощью этой конструкции, когда отражающее зеркало 31 движется вверх с помощью привода 36, противовес 37, таким образом, вытягивается через шкив 42, так, что масса противовеса 37 создает движение, направленное противоположно направлению движения отражающего зеркала 31, и вырабатываемая сила инерции компенсируется. На фиг.8(b) противовес 37 закреплен на отражающем зеркале 31 через привод 43, и, когда отражающее зеркало 31 движется вверх и вниз с помощью привода 36, привод 43 удлиняется или сокращается так, что он передвигает противовес 37 в направлении, противоположном направлению движения отражающего зеркала 31 и, благодаря этому, вырабатываемая сила инерции компенсируется.
На фиг. 9 изображены поясняющие примеры применения четвертого варианта воплощения, содержащие горизонтальный компонент противовеса, причем на фиг. 9(а) изображен вид сбоку примера на основании конструкции по фиг.8(а) и на фиг. 9(b) изображен вид сбоку примера на основании конструкции, изображенной на фиг.6.
На фиг. 9(а) элемент 44 крепления установлен на основании 30 и трос или цепь 47 прикреплены к элементу 44 крепления так, что он вытягивает горизонтальный компонент противовеса 46 через удерживающий ролик 45, к которому прикреплен горизонтальный компонент противовеса 46. Горизонтальный компонент противовеса 46 закреплен в виде множества частей, которые действуют в заданных направлениях, включая направления Х и Y или их промежуточные направления в горизонтальной плоскости. При этом, когда основание 30 передвигается, натяжение противовесов 46 передается на элемент 44 крепления так, что он действует в направлении, противоположном направлению силы, воздействующей на основание 30 в горизонтальной плоскости, и сила инерции, прикладываемая к основанию 30 в горизонтальной плоскости, компенсируется.
На фиг.9(b), горизонтальный компонент противовеса 46 закреплен на элементе 44 крепления через привод 48 так, что сила инерции горизонтального компонента может быть скомпенсирована. Следует отметить, что противовес 37а по фиг.6 установлен на основании 30 через привод 49 по варианту воплощения фиг. 9(b).
Таким образом, в примерах, изображенных на фиг.9, сила инерции, вырабатываемая движением единой структуры, состоящей из отражающего зеркала 31, конденсора 32 и камеры 33, компенсируется противовесом 37а по фиг.6 или противовесом 37 по фиг. 8(а) и, в дополнение к этому, сила инерции, воздействующая на основание 30 в горизонтальном направлении также компенсируется горизонтальным компонентом противовеса 46. В соответствии с этим сила инерции, вырабатываемая в космическом телескопе, может быть дополнительно эффективно скомпенсирована.
На фиг. 10 представлен вид конструкции космического телескопа по пятому варианту воплощения в соответствии с настоящим изобретением, причем фиг. 10(а) представляет вид сбоку, и фиг.10(b) представляет вид со стороны, обозначенной стрелками В-В по фиг.10(а). На фиг.10, части, обозначенные цифрами 30 (основание), 31 (отражающее зеркало), 36 (привод) и 37 (противовес) имеют такую же структуру, как и части по четвертому варианту воплощения, изображенному на фиг.4 и, когда отражающее зеркало 31 передвигается, сила инерции, вызываемая этим передвижением, компенсируется, как описано со ссылкой на фиг.4.
В настоящем пятом варианте воплощения, в дополнение к функциям четвертого варианта воплощения, конденсор по своей конструкции выполнен подвижным. То есть, цифрой 52 обозначен подвижный конденсор, который движется по направляющим 53, или по подвижному держателю 63 конденсора, вместо направляющих 53. Подвижный конденсор 52 установлен на подвижном элементе 62 держателя конденсора. Подвижный элемент 62 конденсора имеет колесо 61 и двигатель 60 так, что двигатель 60 вращает колесо 61, которое приводит в движение подвижный конденсор 52 на направляющих 53. В случае, когда подвижный конденсор 52 установлен на подвижном держателе 63 конденсора, линейный двигатель плоского типа (не показан) устанавливается на держателе 63 подвижного конденсора для перемещения подвижного конденсора 52 со скольжением на держателе 63 подвижного конденсора.
Направляющая 53 выполнена в виде парного элемента, который устанавливается на элементе 55 держателя направляющей. Элемент 55 держателя направляющей установлен на основании 30 с помощью трех элементов 54 держателя. Подвижный конденсор 52 имеет элемент 34 установки камеры, и камера 33 установлена на нижнем конце элемента 34 держателя камеры. Таким образом, подвижный конденсор 52 и камера 33 вместе с элементом держателя камеры совместно установлены на элементе 62 держателя подвижного конденсора. В то время, как конструкция четвертого варианта воплощения, представленная на фиг. 4, выполнена так, что отражающее зеркало 31 и конденсор 32 движутся совместно, конструкция настоящего пятого варианта воплощения такова, что отражающее зеркало 31 и блок конденсора 52 и камеры 33 движутся независимо друг от друга. В соответствии с этим любой из этих элементов может передвигаться для отслеживания звезд и подобных объектов и при этом оптические оси обоих этих элементов должны, в конце концов, совпадать друг с другом.
В пятом варианте воплощения, описанном выше, когда необходимо передвинуть подвижный конденсор 52, включается двигатель 60, который вращает колесо 61 на направляющей 53 и, таким образом, элемент 62 подвижного конденсора, вместе с подвижным конденсором 52 и камерой 33 передвигаются так, чтобы отслеживать звезды и подобные объекты. Если необходимо передвинуть отражающее зеркало 31, это возможно выполнить благодаря включению приводов 36. Но в этом случае отражающее зеркало 31 является большим по сравнению с конденсором 52 и вызывает большую силу инерции, и эта сила инерции должна быть скомпенсирована противовесами 37 так же, как и в четвертом варианте воплощения. Следует отметить, что, когда используются элемент 55 держателя направляющей и направляющей 53 без применения линейного двигателя, элемент 55 держателя направляющей вместе с направляющей 53 вращается в горизонтальной плоскости в направлении вращения α, которое обозначено на фиг.10(b), и благодаря этому подвижный конденсор 52 может быть установлен в любое необходимое положение.
На фиг. 11 представлен вид поперечного сечения примера, в котором для передвижения телескопа применяется устройство управления движением оборудования по шестому варианту воплощения, в соответствии с настоящим изобретением. На фиг.11 телескоп содержит корпус 101 телескопа на подвижной стороне и станину 120 основания на стационарной стороне, и его конструкция такова, что корпус 101 телескопа может свободно двигаться на верхней поверхности станины 120 основания.
То есть на фиг.11 цифрой 101 обозначен корпус телескопа, и цифрой 102 обозначен конденсор, который установлен вверху в центре корпуса 101 телескопа с помощью элемента 105 держателя конденсора. Цифрой 103 обозначена камера, которая установлена непосредственно ниже конденсора 102 с помощью элемента 104 держателя камеры, прикрепленного к внешней кромке конденсора 102. Цифрой 106 обозначено отражающее зеркало, которое отражает свет или лучи, приходящие из космического пространства, за которым производится наблюдение, так, что они фокусируются на конденсоре 102, который установлен над этим отражающим зеркалом 106. Цифрой 107 обозначено множество элементов держателя корпуса телескопа, которые прикреплены к основанию 108 корпуса телескопа для поддерживания нижней поверхности корпуса 101 телескопа.
Основание 108 корпуса телескопа содержит нижнюю часть корпуса 101 телескопа и имеет выпуклую вниз и плавно изогнутую нижнюю поверхность. В основании 108 корпуса телескопа к нижней его поверхности прикреплен магнитный материал, такой как постоянный магнит, так, что корпус 101 телескопа может быть приподнят магнитным полем с возможностью передвижения по вогнутой верхней поверхности 121 станины 120 основания, как описано ниже. Вогнутая верхняя поверхность 121 станины 120 основания выполнена с приданием ей плавно изогнутой взаимно дополняющей формы так, что сохраняется заранее определенный небольшой зазор между нею и выпуклой нижней поверхностью основания 108 корпуса телескопа. Станина 120 основания имеет множество катушек 112 линейного двигателя стационарной стороны, которые прикреплены по всей вогнутой верхней поверхности 121 станины 120 основания так, что основание 108 корпуса телескопа может быть приподнято с возможностью передвижения по этой вогнутой верхней поверхности 121, с сохранением между ними заранее заданного небольшого зазора.
Кроме того, на вогнутой верхней поверхности 121 станины 120 основания прикреплено множество катушек 110 линейного двигателя, предназначенных для передвижения, вдоль радиального направления, проходящего из центра вогнутой верхней поверхности 121 так, что с их помощью можно управлять движением основания 108 корпуса телескопа при перемещении в заданное положение на вогнутой верхней поверхности 121. Кроме того, в станине 120 основания ниже вогнутой верхней поверхности 121 предусмотрено пространство 122 для перемещения противовеса, которое имеет заранее определенную высоту этого пространства и его форма является взаимодополняющей по отношению к форме вогнутой верхней поверхности 121. Противовес 130, нижняя поверхность которого выполнена из магнитного материала, установлен с возможностью передвижения в пространстве 122 передвижения противовеса. На нижней поверхности пространства 122 для передвижения противовеса прикреплено множество катушек 123 стационарной стороны линейного двигателя противовеса и множество катушек 124 линейного двигателя, предназначенного для передвижения противовеса. Следует отметить, что компоновки катушек 123 стационарной стороны линейного двигателя противовеса и катушек 124 линейного двигателя, предназначенных для передвижения противовеса, на нижней поверхности пространства 122 для передвижения противовеса, по существу выполнены такими же, как и у катушек 112 стационарной стороны линейного двигателя и катушек 110 линейного двигателя, предназначенных для передвижения, на вогнутой верхней поверхности 121 станины 120 основания, и поэтому они не показаны.
На фиг. 12 представлен вид со стороны стрелок А-А, изображенных на фиг. 11. На вогнутой верхней поверхности 121 станины 120 основания установлены катушки 112 стационарной стороны линейного двигателя в виде сетки элементов и катушки 110 линейного двигателя, предназначенные для перемещения, установлены вдоль направлений, проходящих радиально от центра вогнутой верхней поверхности 121. В изображенном примере радиальные направления представляют собой восемь направлений и, если их будет больше, чем восемь, возможно будет осуществлять более точное управление. Корпус 101 телескопа, как показано на чертеже на фиг.12, смещен в левую сторону от центра, и в это положение отражающее зеркало 106, конденсор 102 и камера 103 движутся совместно так, что они направляются на наблюдаемый участок космического пространства. В это время противовес 130 смещается в направлении, обратном направлению перемещения корпуса 101 телескопа, то есть вправо, как изображено на чертеже, и благодаря этому сила инерции, вызванная движением корпуса 101 телескопа, компенсируется.
На фиг.13 изображен подробный вид в поперечном сечении части станины основания, изображенной на фиг.11. Основание 108 корпуса телескопа приподнято с помощью магнитного поля благодаря силе отталкивания между магнитным материалом 111 и катушками 112 стационарной стороны линейного двигателя, образуя зазор t, который поддерживается между ними, и смещено в левую сторону благодаря действию катушек 110 линейного двигателя, предназначенных для передвижения. С другой стороны, противовес 130 также приподнят магнитным полем внутри пространства 122 передвижения противовеса с помощью силы отталкивания, создаваемой катушками 123 стационарной стороны линейного двигателя противовеса, и смещен в правую сторону, которая представляет собой направление, обратное направлению движения основания 108 корпуса телескопа, благодаря действию катушек 124 линейного двигателя, предназначенных для передвижения. Все упомянутые передвижения основания 108 корпуса телескопа и противовеса 130 выполняются синхронно и, таким образом, вырабатываемая сила инерции может быть скомпенсирована.
На фиг.14 в (а)-(е), изображены функции корпуса 101 телескопа и противовеса 130 телескопа по шестому варианту воплощения, который изображен на фиг. 11. Эти функции будут описаны со ссылкой на фиг.14, а также на фиг.11 и 12. Вначале, на фиг. 14(а), корпус 101а телескопа и противовес 130 находятся в исходном положении, в котором они размещены в центре восьми частей катушек 110 линейного двигателя, предназначенного для передвижения. В этом положении, когда возбуждаются катушки 112 стационарной стороны линейного двигателя, установленные по всей вогнутой верхней поверхности 121, корпус 101 телескопа приподнимается благодаря отталкивающей силе между магнитным материалом 111, который прикреплен к нижней поверхности основания 108 корпуса телескопа, и катушками 112 стационарной стороны линейного двигателя. В этом случае следует отметить, что катушки 112 стационарной стороны линейного двигателя возбуждаются таким образом, что имеют одинаковую полярность с магнитным материалом 111 так, что между ними образуется сила отталкивания.
На фиг. 14(b) в состоянии, в котором корпус 101 телескопа таким образом приподнят, если будет возбуждена часть катушек 110 линейного двигателя, предназначенных для перемещения, которая обозначена жирными линиями на чертеже, из восьми его частей, корпус 101b телескопа передвигается влево, как изображено на чертеже, с помощью силы притяжения между этой частью катушек 110 линейного двигателя, предназначенных для передвижения, и магнитным материалом 111, который прикреплен к нижней поверхности основания 108 корпуса телескопа. В этом случае часть катушек 110 линейного двигателя, предназначенных для передвижения, изображенная тонкими линиями на чертеже, не возбуждается, и катушки линейного двигателя, предназначенные для передвижения, изображенные толстыми линиями, возбуждаются так, что они имеют полярность, которая создает силы притяжения с магнитным материалом 111, который прикреплен к нижней поверхности основания 108 корпуса телескопа.
В это время противовес 130 также приподнимается с помощью катушек 123 стационарной стороны линейного двигателя противовеса в пространстве 122 передвижения противовеса и движется в правую сторону с помощью катушек 124 линейного двигателя, предназначенных для передвижения. Все указанные движения корпуса 101b телескопа и противовеса 130 выполняются одновременно, и, благодаря этому, сила инерции, создаваемая движением корпуса 101b телескопа, компенсируется.
На фиг. 14(с) три катушки линейного двигателя, предназначенные для перемещения, расположенные с правой стороны, изображенные толстыми линиями, из восьми их частей возбуждаются так, что корпус телескопа 101с движется в правую сторону, и противовес 130 движется в левую сторону, в противоположном направлении, благодаря чему сила инерции, создаваемая движением корпуса 101с телескопа, компенсируется.
Кроме того, на фиг. 14(d) три катушки линейного двигателя, предназначенные для перемещения, расположенные с верхней стороны, которые показаны жирными линиями, из восьми их частей возбуждаются так, что корпус 101d телескопа движется по направлению вверх, и противовес 130 движется в противоположном направлении, вниз. Далее, на фиг.14(е) корпус 101е телескопа движется вниз и одновременно противовес движется вверх, в противоположном направлении, так, что вырабатываемая сила инерции компенсируется.
Как описано выше, корпус 101 телескопа может передвигаться в произвольное положение, в котором он будет направлен на наблюдаемый объект. Кроме того, корпус 101 телескопа движется вдоль вогнутой верхней поверхности 121 станины 120 основания, и отражающее зеркало 106, конденсор 102 и камера 103 могут совместно направляться в требуемом направлении. После того как будет достигнуто требуемое положение, возбуждение катушек 112 стационарной стороны линейного двигателя станины 120 основания выключается, и основание 102 корпуса телескопа садится своей нижней поверхностью на вогнутую верхнюю поверхность 121 станины 120 основания для фиксации в этом месте.
На фиг. 15 представлена схема управления телескопа по шестому варианту воплощения, который изображен на фиг.11. Когда данные о положении корпуса 101 телескопа в двух измерениях по осям координат Х и Y поступают из блока 141 установки, блок 140 управления включает возбуждение катушек 112 стационарной стороны линейного двигателя, чтобы с их помощью приподнять корпус 101 телескопа над станиной 120 основания. Затем блок 140 управления выбирает катушки 110 линейного двигателя, предназначенные для перемещения, в положении, в которое необходимо передвинуть корпус 101 телескопа, и возбуждает их, чтобы выполнить это движение. Одновременно, блок 140 управления возбуждает катушки 123 стационарной стороны линейного двигателя противовеса, чтобы приподнять противовес 130, а также выбирает катушки 124 линейного двигателя, предназначенные для передвижения противовеса, в положении, которое является диаметрально противоположным и симметричным положению корпуса 101 телескопа, и возбуждает их, чтобы с их помощью переместить противовес 130 в противоположном направлении. Выполняя, таким образом, управление, когда корпус 101 телескопа устанавливается в требуемое положение, возбуждение катушек 112 стационарной стороны линейного двигателя выключается по сигналу из блока 141 установки, и корпус 101 телескопа фиксируется на станине основания 120.
На фиг. 16 представлен вид в поперечном сечении примера, в котором устройство управления движением оборудования по седьмому варианту воплощения, в соответствии с настоящим изобретением, применяется вместе с антенной. В седьмом варианте воплощения по фиг.16 корпус 150 антенны используется вместо телескопа, который обозначен номерами ссылки 101-107, в шестом варианте воплощения, представленном на фиг.11. Конструкция станины 120 основания, на которой установлен корпус 150 антенны, выполнена такой же, как изображена на фиг.13.
На фиг. 16 основание 151 корпуса антенны корпуса 150 антенны составляет нижнюю часть корпуса 150 антенны и имеет выпуклую по направлению вниз и плавно изогнутую нижнюю поверхность. На основании 151 корпуса антенны на его нижней поверхности прикреплен магнитный материал 152 такой, как постоянный магнит, так, что корпус 150 антенны может приподниматься с помощью магнитного поля с возможностью передвижения на вогнутой верхней поверхности 121 станины 120 основания.
То есть, станина 120 основания, имеющая такую же конструкцию, как изображена на фиг. 13, имеет на своей вогнутой верхней поверхности 121 установленные катушки стационарной стороны линейного двигателя и благодаря им корпус 150 антенны может приподниматься с помощью магнитного поля с возможностью передвижения по вогнутой верхней поверхности 121 станины 120 основания по такому же принципу, как описано по отношению к шестому варианту воплощения. Они функционируют так же, как описано в отношении фиг.14 и 15, причем повторное описание будет опущено. В настоящем седьмом варианте воплощения корпус 150 антенны также приподнимается с помощью магнитного поля над станиной 120 основания, и с помощью этого корпус 150 антенны 150 может легко передвигаться в требуемое направление и положение.
Следует отметить, что хотя были описаны примеры, в которых телескоп установлен на станине 120 основания в шестом варианте воплощения, и антенна установлена на станине 120 основания в седьмом варианте воплощения, настоящее изобретение не ограничивается ими, кроме приведенных примеров, но может применяться к измерительным приборам, испытательным устройствам или подобному оборудованию, которое имеет направленность, и в этом случае также может быть получен такой же эффект.
Астрономический телескоп-рефлектор по восьмому варианту воплощения, в соответствии с настоящим изобретением, будет описан со ссылками на фиг.17 и 18. На фиг.17 и 18 номером 201 обозначен корпус телескопа, который имеет верхнюю часть 201а и нижнюю часть 201b, причем площадь поперечного сечения нижней части 201b больше, чем в верхней части 201а, как показано на фиг.18. То есть, в то время, как поперечное сечение верхней части 201а является круглым, поперечное сечение нижней части 201b имеет круглую форму, увеличенную с одной стороны, с правой стороны на фиг.18, с помощью части 206 отверстия, которое открывается под наклоном вверх. Нижняя часть корпуса 201 телескопа имеет круглую форму, так же, как и верхняя часть 201а. Следует отметить, что часть 206 отверстия может быть сформирована путем выреза необходимой области произвольной формы.
Номером 202 обозначено вогнутое зеркало, которое установлено в нижней части корпуса 201 телескопа. Номером 203 обозначен конденсор, который установлен за пределами части 206 отверстия в стороне от центральной оси корпуса 201 телескопа, в положении, из которого вогнутое зеркало 202 нижней части корпуса 201 телескопа просматривается через часть 206 отверстия. Номером 204 обозначена камера или окуляр, которая установлена вблизи к части 206 отверстия в положении точки фокусирования света, приходящего от конденсора 203. То есть, конденсор 203 и камера 204 расположены в области, расположенной вблизи к части 206 отверстия, в стороне от центральной оси корпуса 201 телескопа.
Цифрой 205 обозначен привод, который установлен в виде множества элементов между нижней поверхностью корпуса 201 телескопа и нижней поверхностью вогнутого зеркала 202. Таким образом, путем включения элементов 205 привода, находящихся вблизи к требуемому положению, угол установки вогнутого зеркала 202 по отношению к нижней поверхности корпуса 201 телескопа может произвольно изменяться. При этом, в соответствии с углом прихода света 210, отраженный свет 210а направляется на конденсор 203 так, что он точно фокусируется в этом месте.
В настоящем восьмом варианте воплощения, конструкция которого описана выше, свет 210 из космического пространства входит в верхнюю часть 201а корпуса 201 телескопа и отражается вогнутым зеркалом 202, что обозначено номером 210а, и затем фокусируется конденсором 203, как обозначено номером 210b, так, что образуется изображение в камере 204, расположенной непосредственно ниже конденсора 203. Угол света 210а, отраженного вогнутым зеркалом 202, регулируется и может быть установлен таким образом, что свет будет фокусироваться на конденсоре 203 с помощью привода движителями 205, как указано выше. В соответствии с настоящим вариантом воплощения свет 210, входящий в корпус 201 телескопа сверху, поступает на вогнутое зеркало 202 полностью, без частичного экранирования его пути конденсором 203, как в случае известного уровня техники, и точное изображение может быть получено без снижения эффективности фокусировки света.
Следует отметить, что форма поверхности вогнутого зеркала 202 выбирается такой, чтобы с помощью этой формы можно было бы минимизировать разность оптических путей до конденсора 203, а форма вогнутой поверхности конденсора 203 устанавливается произвольно.
На фиг. 19 представлен вид в поперечном сечении конструкции астрономического телескопа-рефлектора по девятому варианту воплощения, в соответствии с настоящим изобретением. В настоящем девятом варианте воплощения, по сравнению с восьмым вариантом воплощения, изображенным на фиг.17, устранены элементы 205 привода, а конструкция в других частях выполнена такой же, как изображена на фиг.17.
В соответствии с этим в девятом варианте воплощения угол вогнутого зеркала 202 по отношению к нижней поверхности корпуса 201 телескопа устанавливается заранее так, что отраженный свет 210а может фокусироваться на конденсоре 203, когда корпус 201 телескопа правильно направлен на наблюдаемый объект, и вогнутое зеркало 202 прикреплено на его нижней части к нижней поверхности корпуса 201 телескопа так, что оно отражает свет под установленным углом. В настоящем девятом варианте воплощения свет 210, входящий в верхнюю часть 201а корпуса 201 телескопа, также совсем не экранируется конденсором, что отличает эту конструкцию от известного уровня техники, при этом не снижается эффективность фокусирования света телескопом так же, как и в восьмом варианте воплощения.
Следует отметить, что телескоп-рефлектор, в соответствии с настоящим изобретением, может применяться для любых случаев, включая телескоп для астрономических наблюдений, установленный на земле, или установленный на космическом корабле, находящемся в космическом пространстве, для наблюдения за космическим пространством, и в этом случае, также, может быть получен тот же эффект.
Выше были описаны три вида вариантов воплощения в соответствии с настоящим изобретением, кроме того, могут применяться комбинации двух или большего количества указанных вариантов воплощения. Например, возможно, чтобы противовесы по первому варианту воплощения применялись в телескопе-рефлекторе по третьему варианту воплощения, и они передвигались с помощью устройства управления движением оборудования по второму варианту воплощения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВРАЩЕНИЯ В УСЛОВИЯХ МИКРОГРАВИТАЦИИ (ВАРИАНТЫ) | 2001 |
|
RU2245282C2 |
| СОЛНЕЧНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП КОСМИЧЕСКОГО БАЗИРОВАНИЯ (ВАРИАНТЫ) | 2015 |
|
RU2607049C9 |
| Устройство для базирования и разгрузки крупногабаритных высокоточных зеркал при их формообразовании и контроле | 2017 |
|
RU2677036C2 |
| МОБИЛЬНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП | 2014 |
|
RU2565355C1 |
| КОСМИЧЕСКИЙ ЗЕРКАЛЬНО-ЛИНЗОВЫЙ ТЕЛЕСКОП | 1999 |
|
RU2154293C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2166783C2 |
| СПОСОБ СЛЕЖЕНИЯ ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2546054C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2111519C1 |
| КОСМИЧЕСКИЙ ТЕЛЕСКОП (ЕГО ВАРИАНТЫ) | 1994 |
|
RU2082992C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |










Изобретение относится к телескопам, предназначенным в основном для установки на борту космического аппарата или на Земле, в месте, где возникновение сил инерции является нежелательным. Изобретение направлено на создание такого телескопа, в котором сила инерции, создаваемая при движении телескопа, компенсируется, при этом устраняется воздействие перемещения телескопа при его движении на космический аппарат, на котором он установлен. Этот технический результат обеспечивается за счет того, что телескоп, содержащий отражающее зеркало, конденсор и камеру или окуляр, установленные в корпусе телескопа, дополнительно содержит как минимум один противовес, который выполняет вращательное движение в направлении, противоположном направлению движения корпуса телескопа при направлении его на наблюдаемый объект так, что сила инерции, вызванная вращательным движением корпуса телескопа, может быть компенсирована. Причем множество противовесов может быть установлено на круговом периметре нижней части отражающего зеркала, или на круговом периметре части основания, на которой установлено отражающее зеркало, или противовес может быть установлен между отражающим зеркалом и частью основания, на которой установлено отражающее зеркало так, что нижняя поверхность отражающего зеркала и нижней части основания соединены друг с другом. Кроме того, каждый противовес может быть установлен через привод. Предусмотрены также и другие примеры установки и размещения противовесов согласно изобретению. 9 з.п.ф-лы, 20 ил.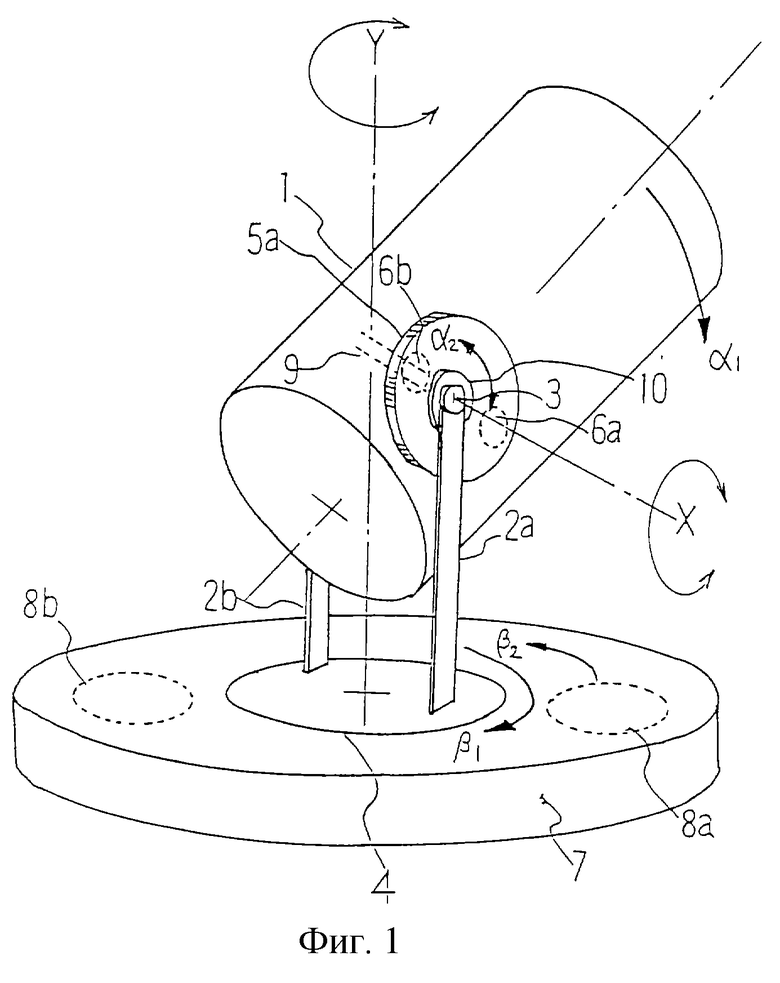
| 0 |
|
SU155961A1 | |
| Монтировка телескопа | 1981 |
|
SU993192A1 |
| ПАРАЛЛАКТИЧЕСКАЯ МОНТИРОВКА ТЕЛЕСКОПА | 0 |
|
SU316058A1 |
| Монтировка телескопа (его варианты) | 1982 |
|
SU1067460A1 |
| Устройство управления дополнительным зеркалом целостата | 1985 |
|
SU1318969A1 |
| US 4702450 А, 27.10.1987 | |||
| US 5131611 А, 21.07.1992 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| А.Хьюит | |||
| - М.: Мир, 1983, с.50. | |||

