Настоящая заявка относится к приводному устройству для привода установленного с возможностью вибрирующего движения рабочего узла электроизделий личного пользования, в частности электробритв.
В качестве бытовых приборов с вибрирующим рабочим узлом известны, например, электробритвы, которые срезают волоски бороды с помощью вибрирующего возвратно-поступательно блока срезающих ножей. Вибрирующие электробритвы приводятся в действие обычно вращающимся электродвигателем, например, электродвигателем постоянного тока. Вращательное движение оси электродвигателя преобразуется при этом посредством подходящего эксцентрикового редуктора в линейное колебательное движение.
В противоположность таким решениям редукторов линейное колебательное движение рабочего узла может быть создано также непосредственно за счет непосредственного привода. Благодаря этому отпадает необходимость в эксцентриковом редукторе для преобразования вращательного движения электродвигателя в линейное колебание.
Одну форму квазилинейного непосредственного привода представляет собой, например, так называемый электродвигатель с виброякорем (см., например, DE 3139523 А1). Недостатком таких электродвигателей с виброякорем является то, что они, во-первых, могут эксплуатироваться только с напряжением сети 220 В и потому не пригодны для приборов на батарейках, а, во-вторых, создают очень сильные магнитные поля рассеяния.
Далее для электробритв известен вибропривод, у которого выполняющий вращательные колебания роторный узел соединен посредством тросовой тяги через направляющие ролики с ножевым блоком и приводит его в действие (DE 4117225 А1). Этот работающий от напряжения сети вибропривод имеет, однако, относительно низкий КПД и неудовлетворителен в отношении своей величины и габаритов. Податливость привода ограничивает его эффективность.
В качестве непосредственного привода для электробритв известен далее линейный электродвигатель с постоянными магнитами, у которого над статором с обмоткой возбуждения по типу подвесного моста на листовых пружинах подвешен двигательный узел с постоянными магнитами, который приводит в действие присоединенный блок срезающих ножей (WO 95/26261). Датчик контролирует скорость двигательного узла, в зависимости от которой блок управления изменяет подаваемую к электродвигателю электрическую мощность с возможностью поддержания постоянной амплитуды колебаний двигательного узла. Этот известный непосредственный привод для электробритв сложен, однако, по своей конструкции и некомпактен. Необходимая для высокого КПД точность достигается лишь с большими затратами.
В основе настоящего изобретения лежит поэтому задача создания усовершенствованного приводного устройства описанного рода, который исключал бы недостатки известных приводов. В частности, приводное устройство должно иметь простую конструкцию и обеспечивать стабильную эксплуатацию с высоким КПД.
Согласно изобретению, эта задача решается посредством приводного устройства описанного рода, содержащего электродвигатель с постоянными магнитами, который включает в себя статор с обмоткой возбуждения и расположенный в поле статора, установленный с возможностью вращения вокруг оси вращения ротор, по меньшей мере, с одним постоянным магнитом, возвратное устройство для возврата ротора в исходное положение с возможностью колебания ротора вокруг исходного положения, устройство сопряжения ротора с рабочим узлом, причем устройство сопряжения соединено с ротором на расстоянии от оси вращения, регистрирующее устройство для регистрации колебательного движения ротора и блок управления электродвигателем с постоянными магнитами в зависимости от зарегистрированного колебательного движения, причем предусмотрены средства управления частотой для управления электродвигателем с постоянными магнитами с частотой, приблизительно соответствующей резонансной частоте ротора.
Вращательная опора выполненного в виде ротора двигательного узла с постоянными магнитами обладает преимуществом высокой стабильности и жесткости. В противоположность пружинящей подвеске по типу подвесного моста у линейного электродвигателя ротор у вращательно-вибрирующего электродвигателя не получает колебательного движения. Вращательно-вибрирующий электродвигатель вызывает в электробритве меньший износ режущей сетки и обеспечивает меньшее расстояние между режущей сеткой и ножевыми блоками. Предпочтительно воздушный зазор между ротором и статором может быть очень маленьким, в частности, составлять около 0,5 мм или менее. За счет вращательной опоры не возникает опасности соприкосновения между ротором и статором. Это вызывает высокий КПД.
Рабочий узел соединен не с осью вращения ротора, а за счет устройства сопряжения эксцентрично соединен непосредственно с телом ротора. Это вызывает оптимальное передаточное отношение рычага и высокую жесткость. В частности, при вибрациях с частотой, гораздо превышающей частоту сети, жесткая и непосредственная передача вращательного движения ротора на рабочий узел имеет высокую эффективность, она и обеспечивает только такие высокочастотные вибрации.
Блок управления, с которым через соединенное с ним регистрирующее устройство возникает обратная связь колебательного движения ротора, управляет обмоткой возбуждения статора таким образом, что ротор колеблется с частотой, приблизительно соответствующей резонансной частоте системы из ротора и возвратного устройства. Работа в резонансе вызывает очень высокий КПД. За счет блока управления можно в противоположность громоздким, работающим от сети приборам с небольшим КПД достичь очень высоких рабочих частот в диапазоне 104 мин-1, благодаря чему продолжительность бритья может быть сокращена. В сочетании с жесткой связью рабочего узла можно очень быстро, в частности, от одного полупериода колебания до следующего, выровнять возникающие при бритье толчки нагрузки. За счет этого повышаются качество и скорость бритья. Из-за высокого КПД привод может быть выполнен небольших размеров. В сочетании с выполнением двигательного узла в качестве ротора конструкция может быть очень компактной.
Согласно предпочтительному варианту выполнения изобретения, ротор имеет различные отрезки из различных материалов. В частности, ротор может иметь внутренний сердечник из магнитомягкого материала с высокой магнитной проницаемостью и полюса из постоянномагнитного материала. Наоборот, ротор может иметь также внутренний сердечник из постоянномагнитного материала и полюса из магнитомягкого материала с высокой магнитной проницаемостью. Благодаря меньшим потерям на рассеяние полюсов из постоянных магнитов поле в воздушном зазоре и, тем самым, выходная мощность и КПД привода выше, чем у второго устройства. Затем индуктивность двигателя со стороны клемм обмотки возбуждения меньше. За счет этого ток может возрастать быстрее, что также повышает выходную мощность. Предпочтительным образом ротор выполнен таким образом, что индуктивность не зависит от положения ротора. Это облегчает электронное управление электродвигателем. Далее предпочтительным образом ось ротора выполнена в магнитомягком материале, а не в относительно трудно обрабатываемом магнитном материале. Это существенно облегчает изготовление.
Ротор может также полностью состоять из постоянномагнитного материала. Предпочтительным образом при этом ось вращения выполнена не из постоянномагнитного материала. Выполнение полностью из постоянномагнитного материала особенно предпочтительно в отношении КПД. Названное выше выполнение имеет, однако, недостатки в отношении изготовления и обработки.
Согласно предпочтительному варианту выполнения изобретения, возвратное устройство соединено с ротором на расстоянии от его оси вращения. Возвратное устройство не воздействует, следовательно, на ось вращения ротора. За счет воздействия на ротор одним плечом рычага достигается точное колебание ротора. Возвратное устройство может воздействовать, в принципе, также на рабочий узел. Преимущественно возвратное усилие передается на ротор через устройство сопряжения, соединяющее рабочий узел с ротором. Возвратное устройство взаимодействует, следовательно, с устройством сопряжения.
Возврат ротора из отклоненных положений в его исходное положение может осуществляться различным образом. Например, за счет магнитных полей может быть создано пружинообразное возвратное усилие, например, в качестве магнитного возвратного устройства на роторе могут быть размещены возвратные магниты. Магнитные возвратные усилия могут также использоваться в комбинации с другими возвратными устройствами. Преимущественно, однако, возврат ротора вызывается механическим пружинящим устройством. При этом могут применяться листовые пружины или винтовые пружины. Предпочтительно возвратное устройство содержит возвратную пружину с крепежным участком для закрепления на роторе и окружающим крепежный участок спиральным участком. Этим достигается особенно компактное и экономящее место расположение возвратного устройства. Преимущественно возвратное устройство расположено на торце электродвигателя, в частности, крепежный участок может быть соединен с ротором на его торце.
Для того чтобы возвратным устройством было заполнено мало конструктивного пространства, возвратная пружина выполнена преимущественно плоской. Крепежный участок и окружающий его спиральный участок проходят в одной плоскости. Толщина возвратной пружины определяется толщиной материала.
Особенно оптимальное выполнение возвратной пружины обеспечивается за счет того, что крепежный участок выполнен, в основном, Z-образным с парой противоположных, в основном, параллельных друг другу участков зацепления, а спиральный участок имеет пару спиральных плечей, которые расходятся спиралеобразно наружу от участков зацепления. Участки зацепления выполнены с возможностью пружинящего сгибания таким образом, что расстояние между участками зацепления может изменяться. Возвратная пружина выполнена, следовательно, с возможностью сжатия с помощью участков зацепления. Тело возвратной пружины, состоящей преимущественно из пружинной стали, может быть выполнено в сечении различным, преимущественно прямоугольным.
Согласно предпочтительному варианту выполнения изобретения, ротор расположен стоя, т.е. обращен своим торцом к рабочему узлу. Устройство сопряжения расположено на торце электродвигателя. Этим достигается очень компактная конструкция. Рабочий узел может быть расположен очень близко к ротору так, что ему не мешает статор. Свобода при конструировании статора остается неограниченной.
Согласно другому предпочтительному варианту выполнения изобретения, ротор может быть также расположен лежа, т.е. периферийная сторона ротора обращена к рабочему узлу. Устройство сопряжения расположено преимущественно на периферийной стороне ротора. Это расположение имеет преимущество в отношении опоры ротора. Торец ротора не требует доступа для устройства сопряжения, при конструировании опоры оси вращения имеется поэтому больше степеней свободы.
В усовершенствовании изобретения устройство сопряжения выполнено в направлении движения рабочего узла неподатливым, а перпендикулярно направлению движения рабочего узла - с люфтом. Перпендикулярно направлению движения рабочего узла устройство сопряжения является, следовательно, податливым, тогда как в направлении движения - жестким. Движение привода ротора передается на рабочий узел непосредственно, без задержки и точно. Податливость перпендикулярно направлению движения обеспечивает компенсацию соответствующей составляющей движения ротора, возникающей в результате его вращательного движения.
Для достижения простой конструкции цепи сопряжения с высокой жесткостью устройство сопряжения выполнено преимущественно только из двух частей. Первый элемент сопряжения, жестко соединенный с ротором, и второй элемент сопряжения, жестко соединенный с рабочим узлом, находятся непосредственно в зацеплении между собой, причем оба элемента сопряжения преимущественно жесткие. Выполнение устройства сопряжения только с двумя жесткими элементами вызывает непосредственную передачу движения привода без задержки и обеспечивает высокие частоты вибраций. Податливость, существующая у известных устройств сопряжения с тросовыми тягами, исключена.
Особенно простое и жесткое выполнение достигается за счет того, что один элемент сопряжения представляет собой штифт, а другой элемент сопряжения - выемку, в частности, продольный паз. Расположение обоих элементов сопряжения можно, в принципе, менять местами. Преимущественно, однако, штифт предусмотрен на роторе, а выемка - на рабочем узле. Это облегчает монтаж возвратного устройства, поскольку оно может быть размещено за счет этого независимо от рабочего узла, и, кроме того, манипулирование рабочим узлом при очистке и т.п. При расположении устройства сопряжения на торце ротора штифт проходит преимущественно параллельно оси вращения ротора. При расположении на периферийной стороне ротора штифт проходит преимущественно перпендикулярно оси вращения ротора.
В усовершенствовании изобретения предусмотрена пара устройств сопряжения, которые соответствуют различным рабочим узлам и расположены на противоположных сторонах оси вращения ротора таким образом, что рабочие узлы приводятся в действие навстречу друг другу. Встречное движение рабочих узлов вызывает уменьшение вибраций, например, на частях корпуса, а инерции рабочих узлов взаимно компенсируются. В частности, в сочетании со стоячим расположением ротора расположение устройств сопряжения на противоположных сторонах оси вращения ротора является предпочтительным. Соответствующие элементы сопряжения жестко соединены с ротором. Устройства сопряжения жестко соединены между собой посредством ротора. Рабочие узлы вибрируют точно навстречу друг другу. Даже при разных нагрузках на рабочие узлы они вибрируют с одинаковой частотой. Это облегчает управление электродвигателем.
Согласно другому предпочтительному варианту выполнения изобретения, могут быть предусмотрены несколько роторов, соответствующих каждый одному рабочему узлу. Каждый рабочий узел приводится в действие, следовательно, собственным ротором. Каждый ротор может быть при этом оптимально согласован с соответствующим рабочим узлом. Преимущественно роторы имеют общую ось вращения. Это упрощает конструкцию приводного устройства. Роторы могут быть выполнены, в принципе, равнополюсными и колебаться равнофазно. Преимущественно, однако, роторы содержат разные направления намагничивания таким образом, что они колеблются навстречу друг другу. Это вызывает в высокой степени уменьшение вибраций. Не только инерции рабочих узлов, но и инерции роторов взаимно компенсируются.
Колебательное движение ротора может регистрироваться различными величинами движения. Для управления подводимой к электродвигателю энергией можно регистрировать, например, отклонение ротора или действующее на ротор возвратное усилие возвратного устройства и создать обратную связь с блоком управления. Преимущественно для управления электродвигателем регистрируют скорость вращения ротора в качестве характеризующей колебание ротора величины движения и выполняют обратную связь с блоком управления.
Колебательное движение можно, в принципе, регистрировать различными датчиками, например, датчиками Холла или оптическими датчиками.
Предпочтительное выполнение изобретения состоит в том, что регистрирующее устройство содержит сенсорное устройство для регистрации потока рассеяния, идущего от постоянного магнита ротора. Регистрация колебательного движения ротора происходит, следовательно, свободно от вспомогательных магнитов. Движение ротора регистрируют с помощью магнитного потока, идущего непосредственно от постоянного магнита ротора. Постоянные магниты образуют часть регистрирующего устройства.
Преимущественно регистрирующее устройство интегрировано в статор, в частности, оно расположено на полюсном башмаке статора. При этом сенсорная катушка может быть просто намотана на зуб полюсного башмака статора. Интегрированное расположение сенсорного устройства в статоре обладает тем преимуществом, что может быть достигнута экономящая место плотная конструкция приводного устройства.
Для повышения точности регистрации колебательного движения ротора регистрирующее устройство содержит компенсирующее устройство для компенсации ошибочной доли в сигнале сенсорного устройства. Дополнительно к потоку постоянных магнитов пропорциональный току электродвигателя магнитный поток обмотки возбуждения может индуктировать в сенсорном устройстве напряжение, основная волна которого также содержится в выходном сигнале сенсорного устройства. Преимущественно компенсирующее устройство содержит токовый датчик для регистрации тока электродвигателя и блок вычитания для вычитания сигнала токового датчика, пропорционального току электродвигателя, из сигнала сенсорного устройства. Регистрирующее устройство вырабатывает, следовательно, независимо от рабочего состояния электродвигателя выходной сигнал, являющийся мерой скорости ротора. Электродвигателем можно соответственно этому управлять с возможностью его работы при разных нагрузках с постоянной скоростью срезающих ножей при его резонансной частоте.
Регистрация колебательного движения ротора может происходить также косвенно. Согласно варианту выполнения изобретения, приводное устройство свободно от датчика колебательного движения. К блоку управления возвращается пропорциональный току электродвигателя сигнал. Движение ротора с постоянными магнитами оказывает за счет индуктированного в катушке статора напряжения непосредственное воздействие на ток электродвигателя. Ток электродвигателя может быть детектирован подходящим токовым датчиком, и вместо сигнала датчика движения для управления электродвигателем создают обратную связь этого сигнала с блоком управления. С использованием второго сигнала, являющегося мерой амплитуды основной волны напряжения на зажимах, приводящего в действие электродвигатель, можно вместе с сигналом тока электродвигателя сделать заключение об индуктированном в электродвигателе напряжении. Это напряжение пропорционально скорости вращения ротора, так что таким образом обеспечивается регулирование этой величины при разных нагрузках.
Для того чтобы вызвать нужное колебание ротора, блок управления посредством регулирующего устройства регулирует подводимую к электродвигателю электрическую энергию в зависимости от колебательного движения ротора. Регулирующее устройство содержит детектор пиковых значений для регистрации пикового значения сигнала регистрирующего устройства и регулирует подводимую к электродвигателю энергию в зависимости от зарегистрированного пикового значения. Уменьшение сигналов колебательного движения до определенного значения упрощает управление обмоткой возбуждения без заметного снижения точности. При этом детектированное пиковое значение можно сравнить с заданным значением и регулировать подводимую к электродвигателю энергию в зависимости от разности.
Для оказания влияния на колебательное движение ротора можно изменить подвод энергии к электродвигателю различным образом. Преимущественно блок управления содержит генератор сигналов для управления электродвигателем биполярными импульсами напряжения, причем предусмотрено модулирующее устройство для модулирования импульсов напряжения в зависимости от колебательного движения ротора. Согласно первому выполнению изобретения, можно оказать влияние на амплитуду колебаний ротора за счет модуляции биполярных импульсов, т.е. так называемой фазово-импульсной модуляции. Посредством управляемого регулирующим устройством фазовращателя можно осуществить сдвиг биполярных импульсов напряжения относительно колебательного цикла ротора. Согласно другому выполнению изобретения, можно управлять подводимой к приводу электрической мощностью посредством амплитудно-импульсной модуляции. При этом изменяют амплитуду импульсов напряжения и управляют за счет этого количеством электрической энергии импульса напряжения. В частности, можно далее модулировать выходной сигнал генератора сигналов с возможностью воздействия регулятором на биполярные импульсы для управления электродвигателем по их ширине. Следовательно, при так называемой широтно-импульсной модуляции изменяют длительность импульсов напряжения и вызывают, тем самым, варьирование подводимой к электродвигателю мощности. В принципе, можно комбинировать между собой разные формы модуляции. Применение какой-либо отдельной формы модуляции упрощает, однако, управляющую электронику и позволяет достичь достаточной точности.
Согласно предпочтительному варианту выполнения изобретения, генератор сигналов выполнен с возможностью вырабатывания импульсов напряжения в постоянном фазовом отношении с колебательным движением ротора. Если для управления подводимым количеством энергии осуществляют широтно-импульсную модуляцию, то в противоположность обычной для подобных целей применения широтно-импульсной модуляции импульсы напряжения вырабатывают не в установленный начальный момент времени, а изменяют только конец импульсов напряжения, а приводные импульсы расширяют или сужают симметрично в обе стороны. Следовательно, даже при измененном коэффициенте заполнения импульсов при широтно-импульсной модуляции достигается жесткая фазовая связь между имеющим обратную связь сигналом датчика, характеризующим колебательное движение ротора, и основной волной подвергнутых широтно-импульсной модуляции приводных импульсов. За счет этого может быть достигнут особенно высокий КПД. Электродвигатель с постоянными магнитами эксплуатируют, следовательно, точно в резонанс.
Преимущественно с помощью регулирующего устройства вырабатывают, по меньшей мере, один варьируемый уровень постоянного напряжения, который посредством подходящих компараторов сравнивают с треугольным сигналом, выработанным генератором сигналов синхронно с колебанием ротора, причем ширину импульсов напряжения устанавливают в соответствии с точками пересечения треугольного сигнала с уровнем постоянного напряжения.
Управление электродвигателем биполярными импульсами напряжения может происходить, в принципе, различным образом. Согласно одному выполнению изобретения, средства управления частотой содержат осциллятор для управления ротором с заданной частотой. Эта заданная частота преимущественно соответствует приблизительно резонансной частоте ротора в сочетании с возвратным устройством.
Для достижения особенно высокого КПД и эксплуатации в резонанс даже при изменениях резонансной частоты, согласно другой форме выполнения, средства управления частотой содержат автоколебательную петлю обратной связи. Она может содержать, в частности, фазовращатель для сигнала регистрирующего устройства, генератор сигналов для установления временной последовательности биполярных импульсов напряжения, силовой каскад для управления электродвигателем и регулирующее устройство для регулирования подводимой к электродвигателю электрической энергии. Управление электродвигателем в автоколебательной петле обладает тем преимуществом, что управляющая частота всегда поддерживается точно на резонансе, т.е. независимо от сдвига резонансной частоты, например, за счет нагрузки привода зависимым от скорости усилием. Прорывы амплитуды напряжения из-за выхода из строя управления исключены.
В частности, у электробритв важным аспектом является достижение компактного расположения приводного устройства. Бритвы должны быть, в целом, небольшими и удобными в обращении, тогда как, с другой стороны, требуется достаточно места для энергонакопителя, например, аккумулятора. Предпочтительно выполненные электробритвы содержат поворотную относительно корпуса головку, несущую, по меньшей мере, один ножевой узел, приводимый в действие приводным устройством. Посредством поворотной головки можно достичь оптимального приспосабливания ножевого узла к выбриваемому контуру лица. Согласно другому аспекту изобретения, у электробритвы названного рода приводное устройство интегрировано в поворотную головку.
Приводное устройство установлено, следовательно, с возможностью поворота вместе с поворотной головкой относительно корпуса бритвы. Особое преимущество этого расположения состоит в обеспечении большей подвижности поворотной головки. Сопряжение приводного устройства, по меньшей мере, с одним ножевым узлом необязательно должно иметь степень свободы или подвижность, поскольку относительного движения между поворотным вместе с поворотной головкой ножевым узлом и приводным устройством не требуется. Приводное устройство колеблется вместе с поворотной головкой.
Согласно предпочтительному варианту выполнения изобретения, приводное устройство расположено с осью вращения ротора вертикально, в частности, ось поворота головки может вертикально пересекаться осью вращения ротора. В исходном положении поворотной головки, т.е. в положении, не откинутом к корпусу бритвы, ось вращения ротора может проходить параллельно продольной оси корпуса бритвы. Предпочтительным образом несколько параллельных ножевых узлов могут приводиться в действие встречно одним ротором и могут быть жестко связаны между собой.
Особенно низковибрационное выполнение может быть обеспечено за счет того, что ось вращения ротора расположена горизонтально.
Настоящее изобретение более подробно поясняется ниже с помощью примеров выполнения и соответствующих чертежей, на которых изображают:
- фиг.1 - схематично вибрирующий однофазный бесщеточный электродвигатель постоянного тока приводного устройства на виде сверху согласно первому выполнению изобретения;
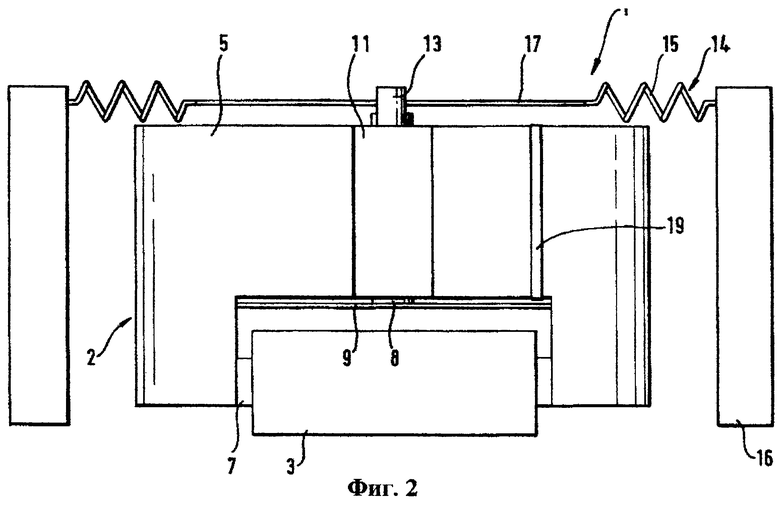
- фиг.2 - схематично электродвигатель по фиг.1 на виде сбоку;
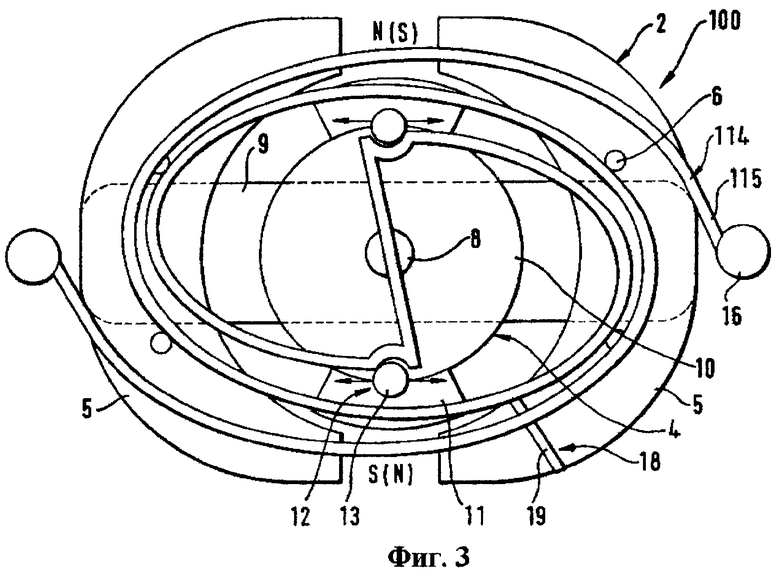
- фиг.3 - схематично вибрирующий однофазный бесщеточный электродвигатель постоянного тока приводного устройства на виде сверху аналогично фиг.1 согласно другому выполнению изобретения;
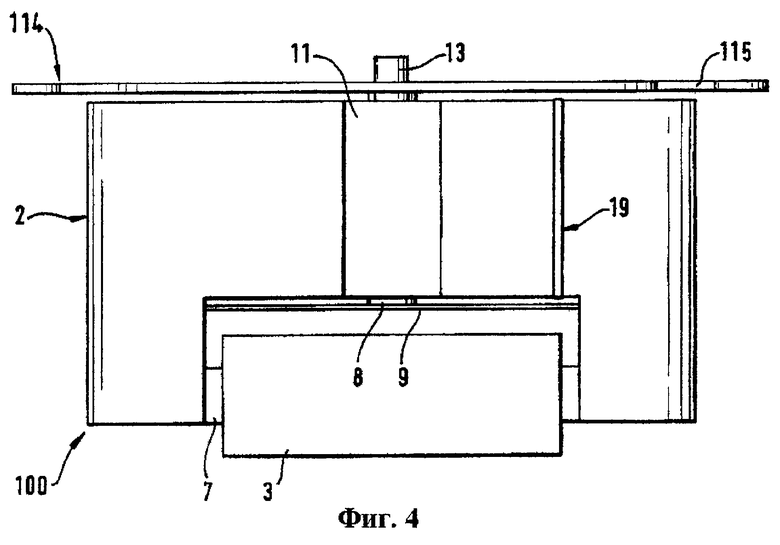
- фиг.4 - схематично электродвигатель по фиг.3 на виде сбоку;
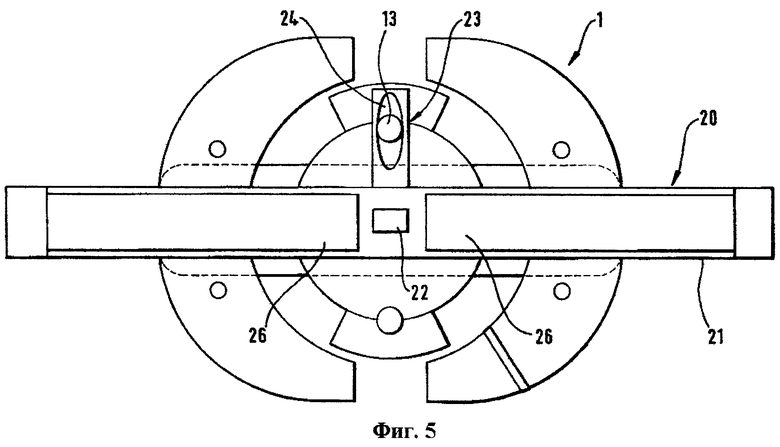
- фиг. 5 - схематичный вид сверху на электродвигатель по фиг.3, показывающий сопряжение среднего режущего узла через качающийся мостик;
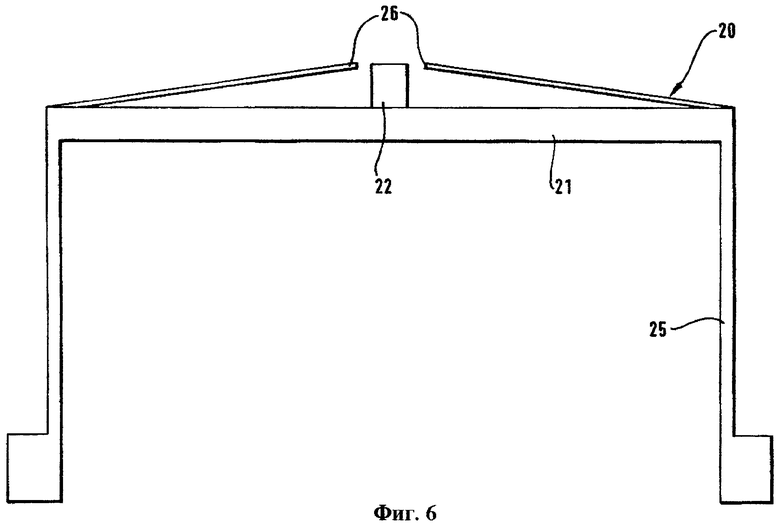
- фиг.6 - схематично качающийся мостик из фиг.5 на виде сбоку;
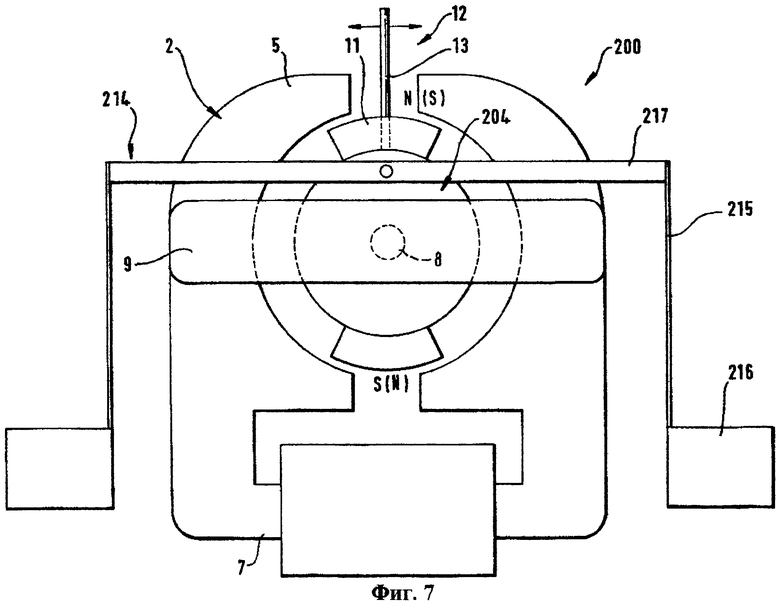
- фиг.7 - схематично вибрирующий однофазный бесщеточный электродвигатель постоянного тока согласно другой форме выполнения с лежачим расположением ротора на виде сбоку в направлении оси вращения ротора;
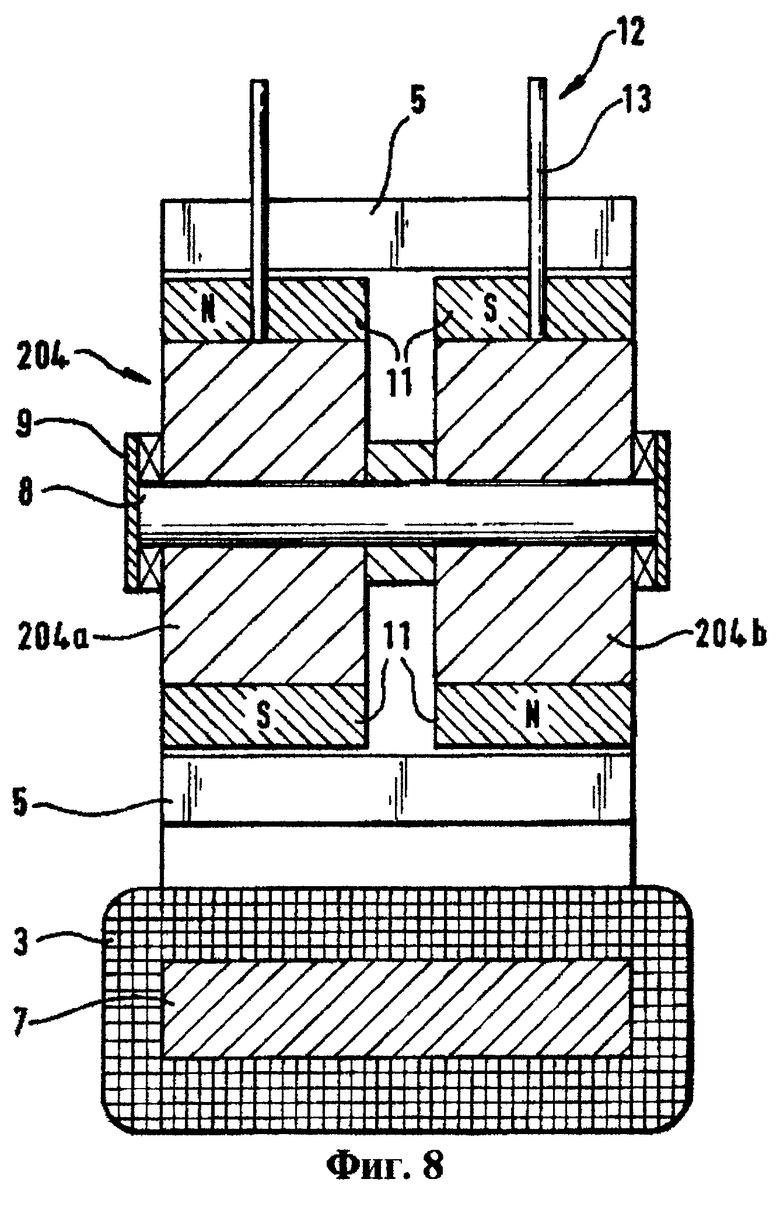
- фиг.8 - схематично электродвигатель из фиг.7 в среднем разрезе, содержащем ось вращения ротора;
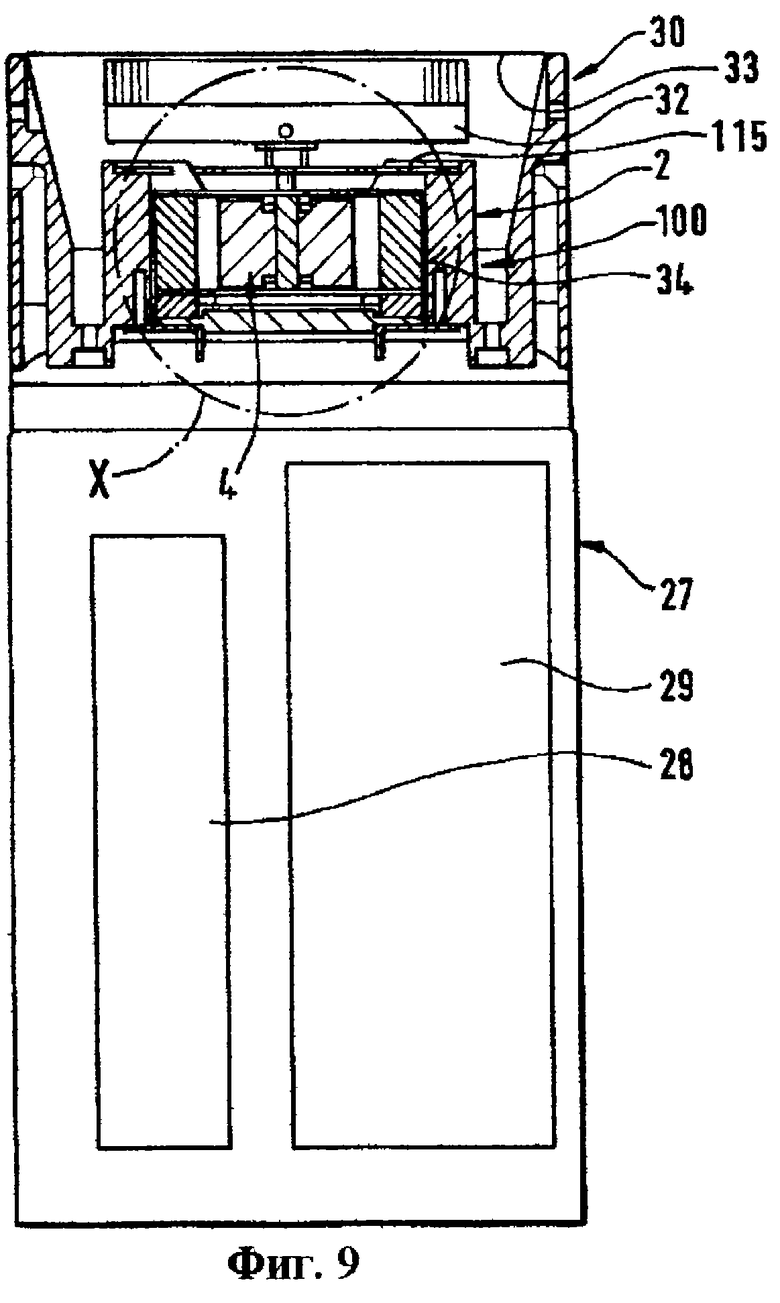
- фиг. 9 - вид сбоку электробритвы с приводным устройством, интегрированным в поворотную головку электробритвы, согласно одному выполнению изобретения, в частичном разрезе по линии В-В на фиг.11;
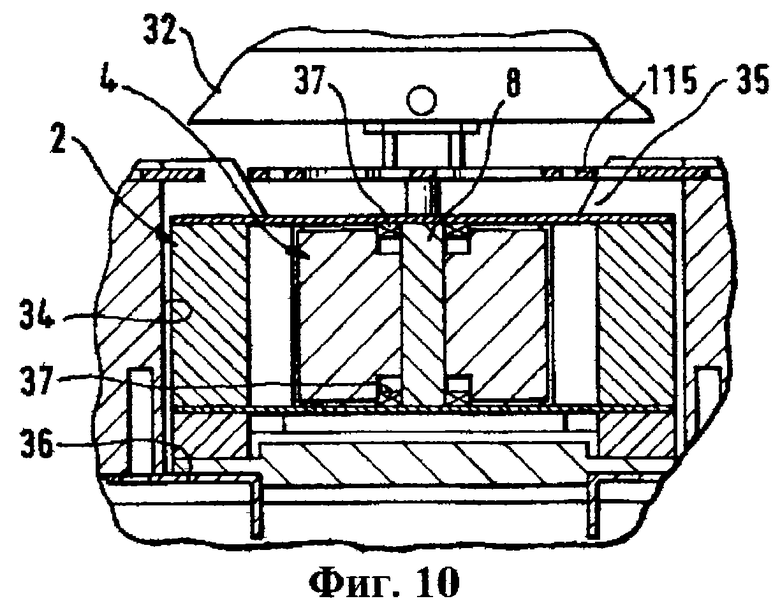
- фиг. 10 - увеличенный фрагмент обозначенной на фиг.9 буквой Х зоны поворотной головки, показывающей приводное устройство в разрезе;
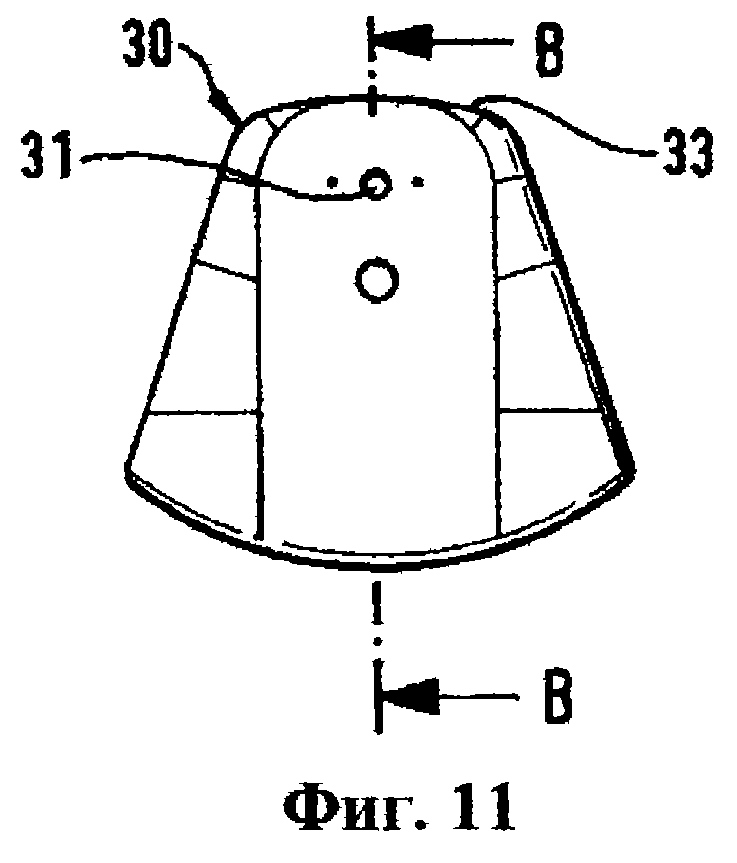
- фиг.11 - вид сбоку поворотной головки из фиг.9;
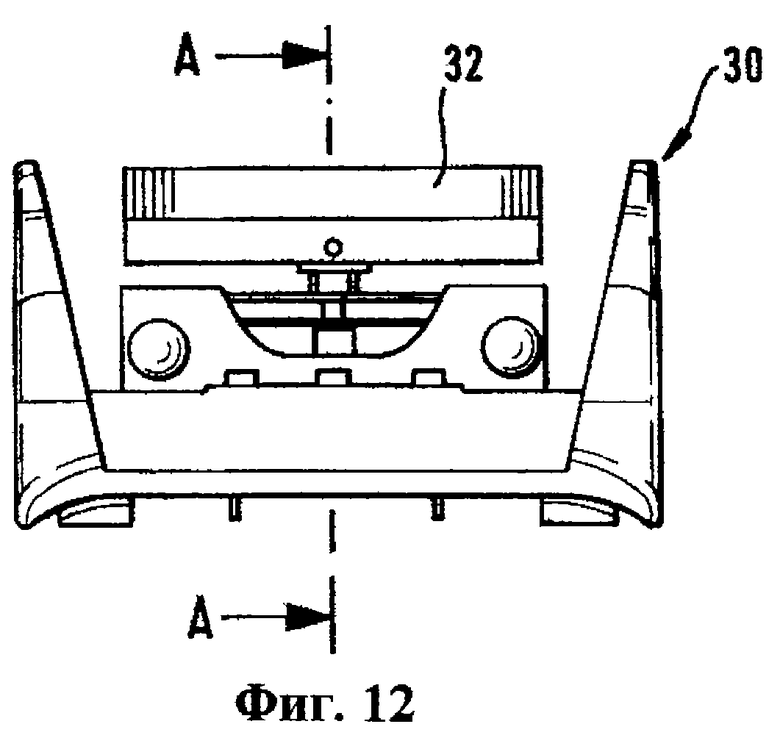
- фиг.12 - вид сбоку поворотной головки с интегрированным в нее приводным устройством согласно выполнению по фиг.9-11;
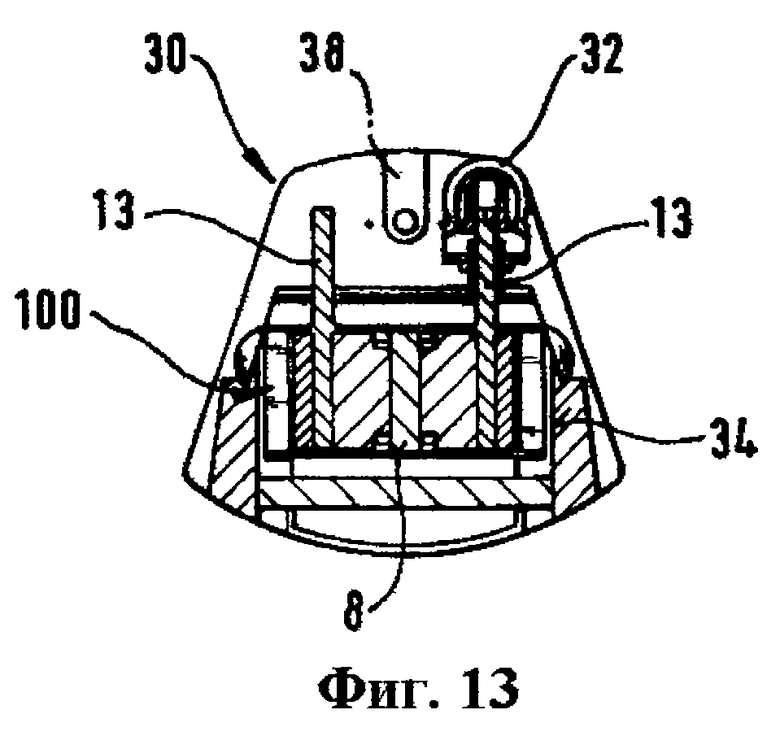
- фиг. 13 - вид сбоку поворотной головки в разрезе по линии А-А из фиг. 12;
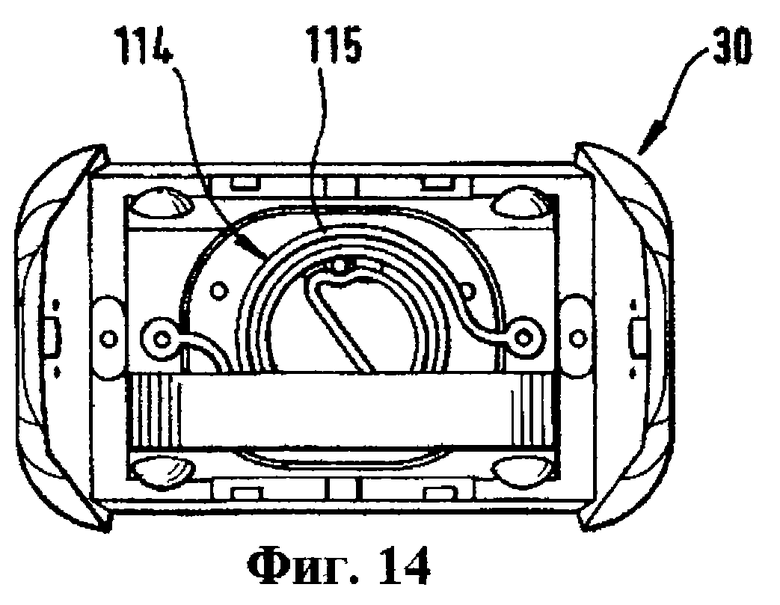
- фиг.14 - вид сверху на поворотную головку в выполнении по фиг.9-13;
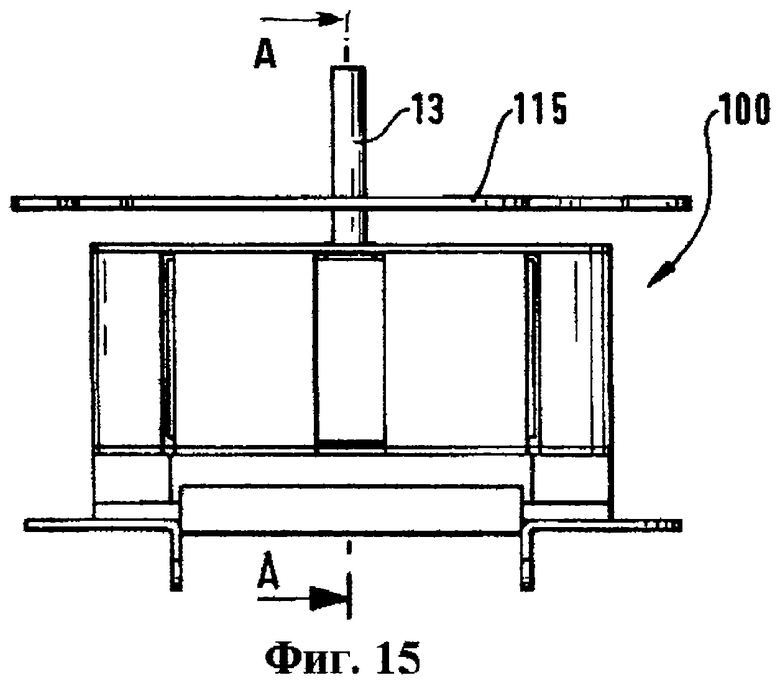
- фиг.15 - вид сбоку электродвигателя с постоянными магнитами приводного устройства в выполнении по фиг.9-14;
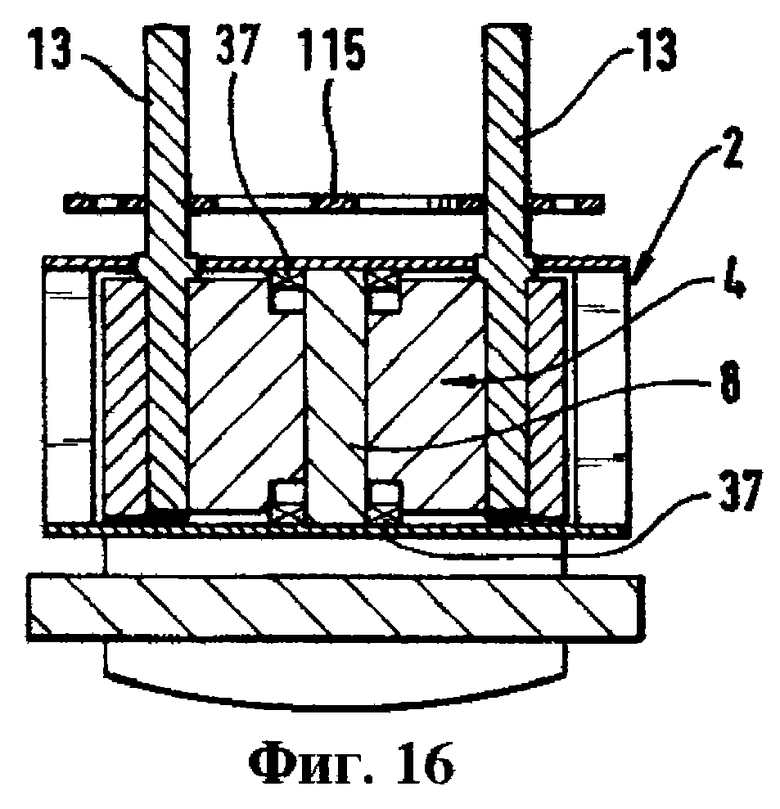
- фиг.16 - разрез электродвигателя по линии А-А на фиг.15;
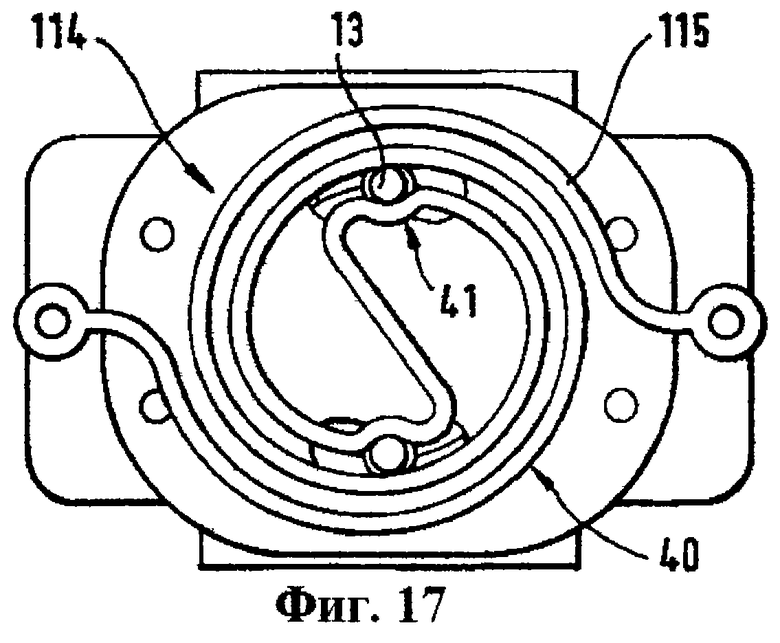
- фиг. 17 - вид сверху на электродвигатель из фиг.15, показывающий возвратную пружину;
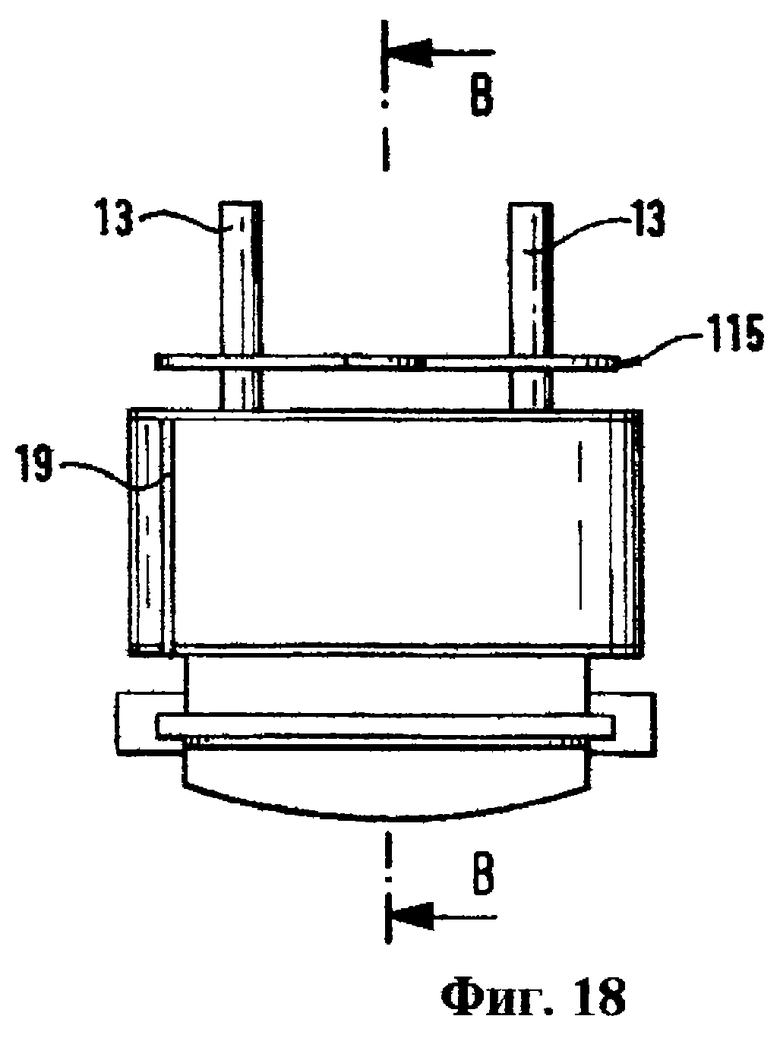
- фиг.18 - в неразрезанном виде электродвигатель в перспективе аналогично фиг.16;
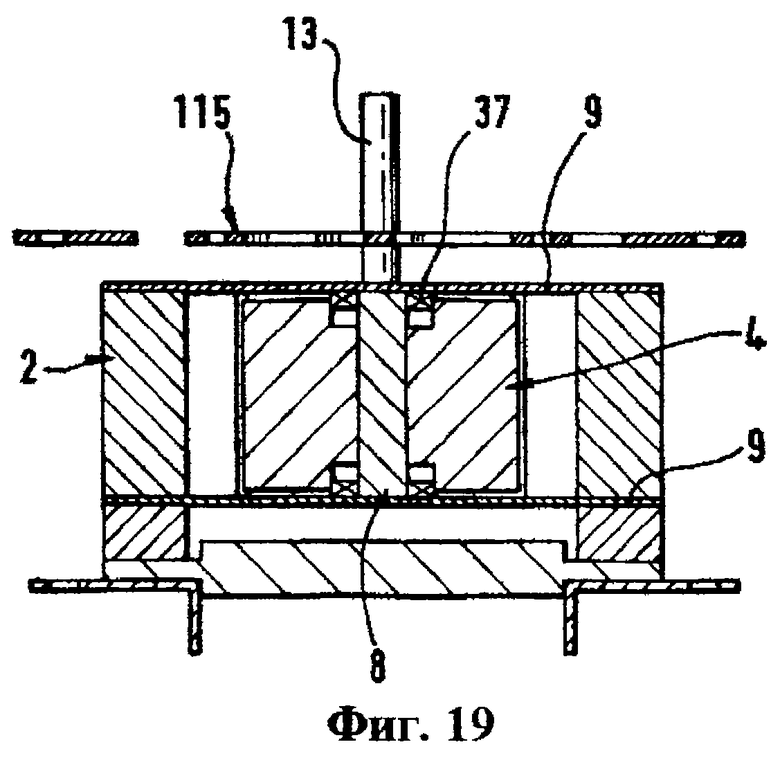
- фиг.19 - продольный разрез электродвигателя по линии В-В на фиг.18;
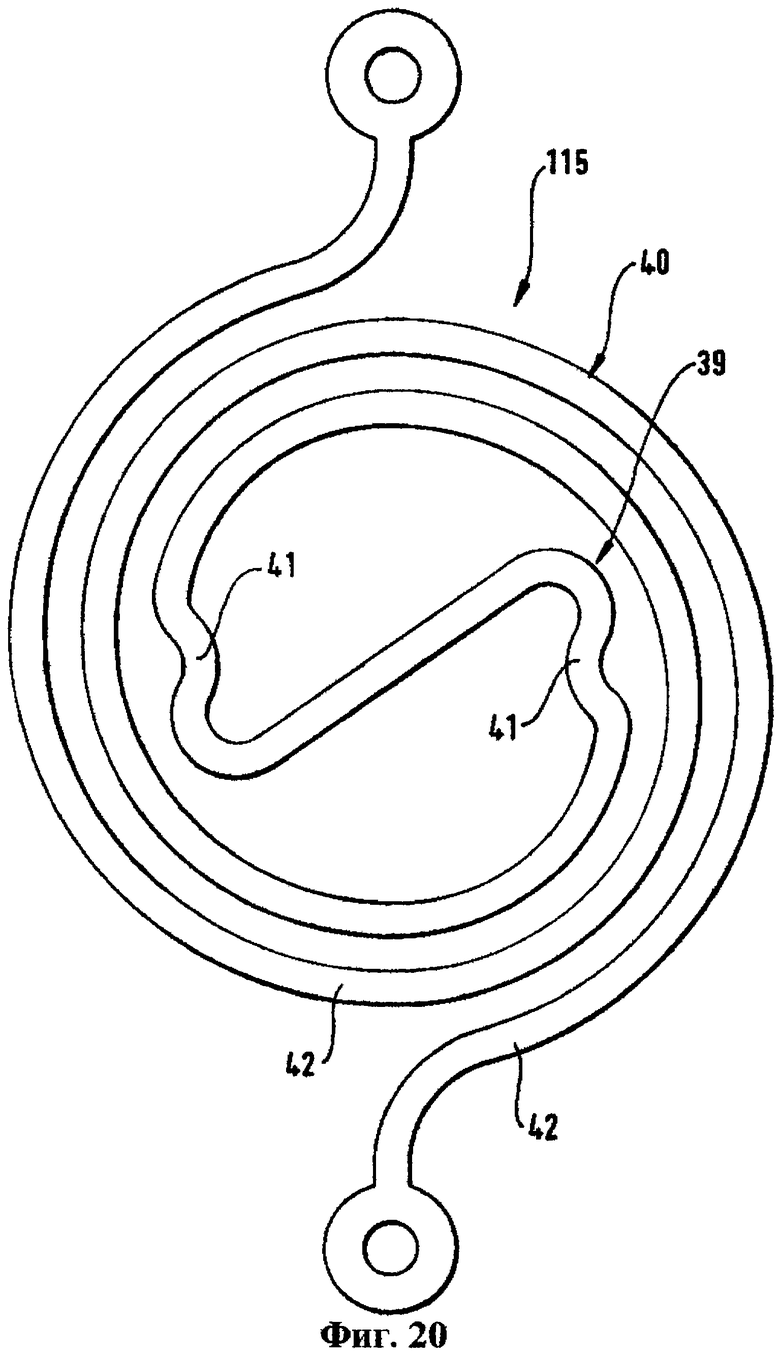
- фиг. 20 - вид сверху на возвратную пружину из фиг.17 в увеличенном виде;
- фиг.21 - диаграмму, показывающую временную характеристику (а) скорости вращения и отклонения ротора, (b) приводных импульсов и тока электродвигателя, (с) выходного сигнала сенсорного устройства колебаний, (d) выходного сигнала токового датчика и (е) соответствующего скорости вращения полезного сигнала сенсорного устройства колебаний, очищенного от влияния напряжения, индуктированного током электродвигателя;
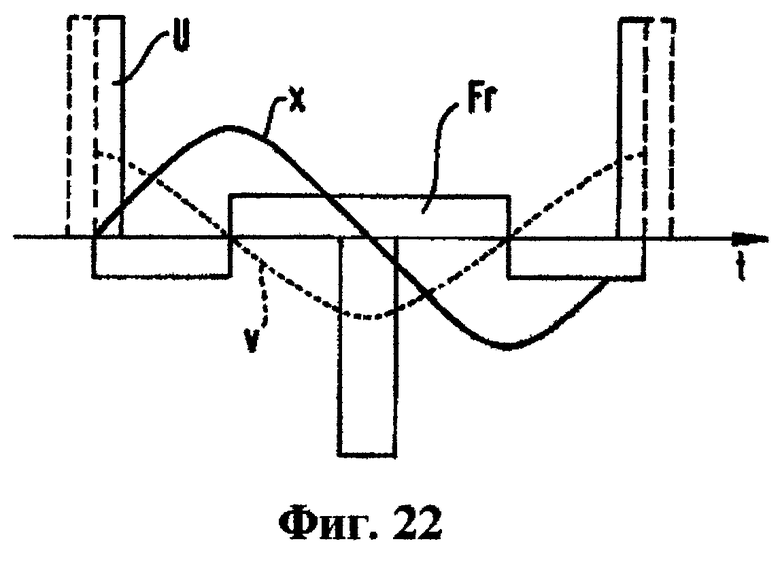
- фиг. 22 - диаграмму, показывающую временную характеристику режима работы электродвигателя, в частности,
отклонение ротора, скорость ротора и приводные импульсы;
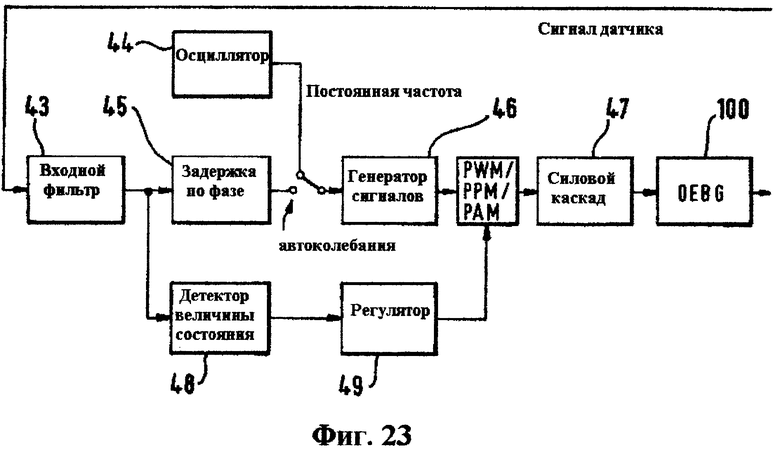
- фиг.23 - блок-схему блока управления электродвигателем выборочно с постоянной частотой или в автоколебательной петле с возвратом синхронного с колебанием ротора сигнала датчика;
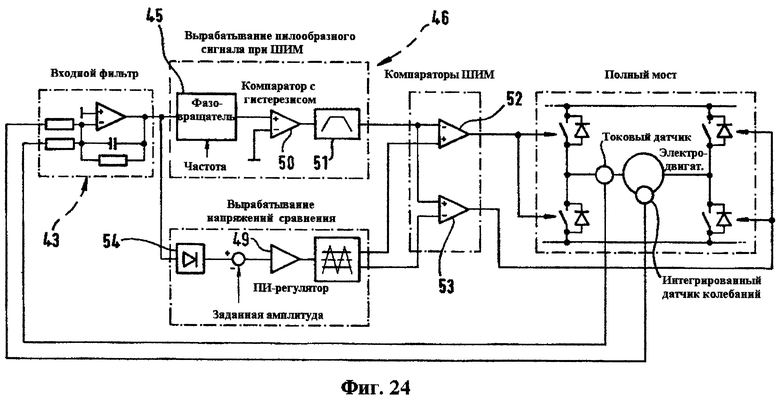
- фиг.24 - блок-схему блока управления электродвигателем с широтно-импульсной модуляцией приводных импульсов в автоколебательной петле;
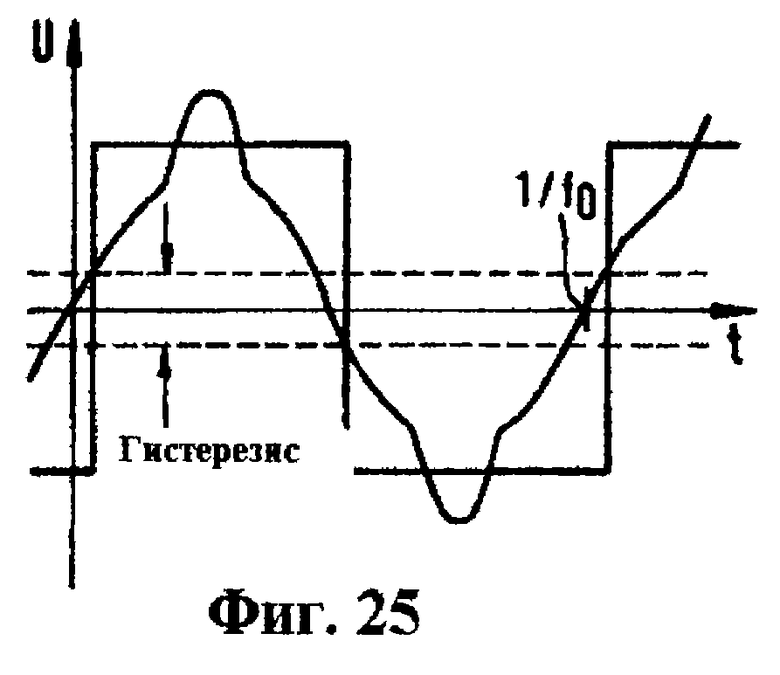
- фиг. 25 - диаграмму, показывающую временную характеристику полезного сигнала датчика по фиг.21(е) и его обработку, причем полезный сигнал датчика велик по отношению к паразитным составляющим;
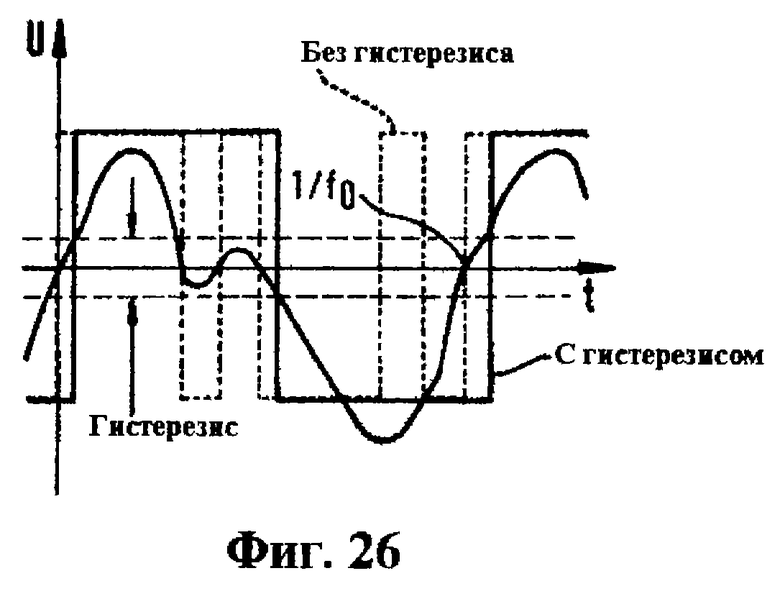
- фиг. 26 - диаграмму аналогично фиг.25, причем полезный сигнал датчика относительно мал по отношению к паразитным составляющим, а обработка показана с гистерезисом или без него;
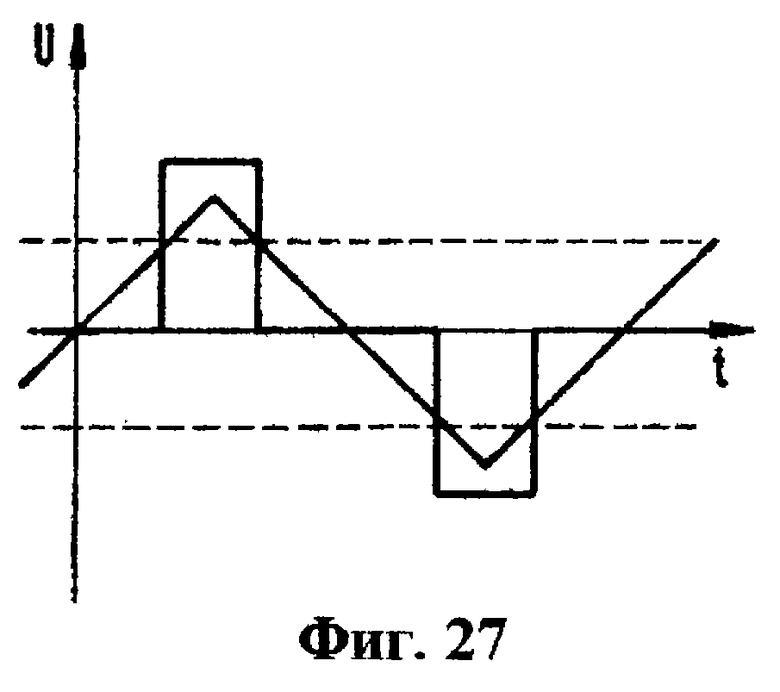
- фиг.27 - диаграмму, поясняющую временную характеристику генерирования подвергнутых широтно-импульсной модуляции приводных импульсов.
Электродвигатель 1 с постоянными магнитами выполненного, согласно изобретению, приводного устройства согласно фиг.1 и 2 содержит статор 2 с обмоткой 3 возбуждения и в качестве двигательного элемента ротор 4, расположенный в поле статора 2.
Статор 2 содержит ярмо с двумя согнутыми приблизительно в форме полукруга полюсными башмаками 5, ограничивающими между собой пространство в форме кругового цилиндра. Полюсные башмаки 5 выполнены из дугообразных железных пластин, проходящих перпендикулярно продольной оси ограниченного полюсными башмаками 5 внутреннего пространства. Железные пластины позиционированы по отношению друг к другу посредством центрирующих штифтов 6. Оба полюсных башмака соединены между собой на нижней стороне магнитопроводом 7, выполненным преимущественно также из железных пластин. Вокруг магнитопровода 7 намотана обмотка 3 возбуждения (фиг.2). Статор 2 может быть выполнен также вместо железных пластин из другого магнитомягкого материала с высокой магнитной проницаемостью.
Ротор 4 расположен в промежутке между обеими половинами статора 2 и простирается своей осью 8 вращения вдоль продольной оси цилиндрического промежутка. Ось 8 вращения ротора установлена на нижней и верхней сторонах полюсных башмаков 5 с возможностью вращения посредством подшипников. Для этого на нижней и верхней сторонах полюсных башмаков 5 предусмотрен подходящий подшипниковый щит 9. Ротор 4 может быть установлен на опорах также одной стороной, однако преимущественно он опирается обеими сторонами, поскольку такая опора вызывает более высокую жесткость и обеспечивает меньший зазор между ротором и полюсными башмаками.
Ротор 4 содержит сердечник из магнитомягкого материала, в частности, из железа, в котором расположена ось 8 вращения. Сердечник 10 может иметь различную форму, преимущественно он имеет в сечении форму кругового цилиндра. По окружности сердечника 10 ротора 4 диаметрально противоположно расположены два чашеобразных постоянных магнита 11. Постоянные магниты 11 могут простираться каждый вокруг сердечника 10 в секторе под углом до 180o. В частности, постоянные магниты 11 могут простираться каждый секторообразно вокруг сердечника 10 под углом 40-100o, в частности, около 70o. Постоянные магниты могут быть намагничены радиально или диаметрально. Оси намагничивания указывают у обоих постоянных магнитов 11 в одном направлении, на фиг.1, следовательно, или вверх или вниз. Постоянные магниты 11 расположены на сердечнике 10 таким образом, что они в исходном положении ротора лежат точно против промежутков между обоими полюсными башмаками 5 (фиг.1).
В качестве устройства 12 сопряжения для передачи приводного движения ротора 4 на ножевые узлы электробритвы (на фиг.1 и 2 не показаны) ротор 4 несет на своем верхнем торце два выступающих поводковых штифта 13, которые соединяются с ножевыми узлами и приводят их в действие. Устройство 12 сопряжения расположено, следовательно, на верхнем торце ротора 4. Поводковые штифты 13 удалены от оси 8 вращения ротора и расположены преимущественно приблизительно на наружной периферии ротора, с тем, чтобы обеспечить оптимальные передаточные отношения рычага. Как видно из фиг.1, поводковые штифты 13 расположены, в частности, между сердечником 10 и постоянными магнитами 11 ротора 4. Это может быть использовано в качестве монтажного или позиционирующего приспособления для постоянных магнитов 11.
Во время работы ротор 4 совершает небольшие угловые вибрации, что более подробно поясняется ниже. Максимальные угловые амплитуды лежат преимущественно в диапазоне от ±5 до ±20, в частности, составляют приблизительно порядка ±12. Небольшие углы вращения вызывают вращательное колебание поводковых штифтов в направлении движения блоков срезающих ножей, на фиг.1 слева направо и наоборот. Связанные с вращательным колебанием боковые движения поперек направления движения режущих узлов, на фиг.1, следовательно, вверх и вниз, очень малы и составляют максимум около 0,1 мм. Эти небольшие боковые движения могут быть компенсированы за счет соответствующей податливости устройства сопряжения поперек собственно направления движения, в частности, соответствующие выемки в ножевых узлах, с которыми в зацеплении находятся поводковые штифты 13, могут быть выполнены в виде продольных пазов. За счет расположения поводковых штифтов 13 на противоположных сторонах оси 8 вращения небольшие вращательные колебания ротора 4 преобразуются во встречное вращательное возвратно-поступательное движение сопряженных с поводковыми штифтами 13 ножевых узлов электробритвы. Встречное движение уменьшает колебания корпуса и шумообразование. Кроме того, ножевые узлы жестко связаны между собой посредством ротора 4. Они колеблются точно встречно с одинаковой частотой.
Для достижения как можно более высокой амплитуды колебаний ножевых узлов и как можно более высокого КПД привода предпочтительно снабдить ротор 4 пружинообразным возвратным усилием вокруг показанного на фиг.1 исходного положения и выбрать частоту возбуждения, равную резонансной частоте связанной электромеханической системы пружина - масса, что более подробно поясняется ниже. В качестве возвратного устройства 14 у выполнения на фиг.1 и 2 предусмотрены четыре спиральные пружины 15, которые возвращают ротор 4 в исходное положение после отклонений из него. Возвратные пружины 15 прочно сочленены, при этом каждая одним концом с возвратным упором 16, например, участком корпуса бритвы, а соответственно другим концом связаны с ротором 4. Возвратные пружины 15 воздействуют при этом не на ось 8 вращения ротора 4, а на удалении от нее эксцентрично сочленены с телом ротора 4, в частности, они соединены с поводковыми штифтами 13 устройства 12 сопряжения. Как видно из фиг.1, возвратные пружины 15 попарно соединены с одним из поводковых штифтов 13 посредством возвратных элементов 17 сопряжения. В качестве возвратных элементов сопряжения предусмотрены жесткие стержни или пластины, которые приблизительно посередине сочленены с поводковыми штифтами 13 преимущественно с возможностью вращения.
Преимущественно возвратные элементы 17 сопряжения, иначе, чем это показано на фиг.1, выполняют достаточной ширины, так что они закрывают верхний подшипниковый щит 9 и простираются наружу до края статора 2. Возвратные элементы 17 сопряжения и верхний подшипниковый щит 9 герметизируют, таким образом, внутреннее пространство электродвигателя от засоряющих волосков и влаги. Следовательно, предусмотрена преимущественно герметизация внутреннего пространства электродвигателя.
Вместо описанного сопряжения возвратных пружин 15 с поводковыми штифтами 13 пружины могут быть включены также между концами приводимых ротором 4 ножевых узлов и соответствующими возвратными упорами, например, корпусом бритвы. Пружины опираются тогда одним концом на ножевые узлы, а другим - на корпус бритвы.
Для регистрации колебательного движения ротора 4 предусмотрено регистрирующее устройство 18, содержащее сенсорную катушку 19, воспринимающую идущий от постоянных магнитов 11 магнитный поток. Размещения на роторе 4 вспомогательных магнитов при этом не требуется. Как видно из фиг.1, сенсорная катушка 19 интегрирована в статор 2. При этом сенсорная катушка 19 просто намотана вокруг зуба полюсного башмака 5. Если движется ротор 4 с постоянными магнитами, то через сенсорную катушку 19 течет изменяющийся магнитный поток. Вызванное этим индуктированное напряжение является мерой скорости вращения ротора 4 и может использоваться в качестве сигнала колебаний. Индуктированное в сенсорной катушке 19 напряжение содержит также долю изменяющегося тока обмотки 3 возбуждения. Эта доля накладывается в качестве паразитного сигнала на собственно колебательный сигнал. Эта паразитная доля компенсируется компенсирующим устройством, что более подробно поясняется ниже.
Вместо четырех винтовых пружин в качестве возвратного устройства 114 может быть предусмотрена одна плоская спиралеобразная торсионная пружина. Торсионная пружина 115 воздействует на оба поводковых штифта 13 ротора 4 и размещена своими внешними концами на статоре 2 или в другой фиксированной точке корпуса бритвы. Использование подобной торсионной пружины 115 обеспечивает особенно компактную конструкцию электродвигателя 100 с постоянными магнитами. Выполнение на фиг.3, 4 соответствует в остальном выполнению на фиг. 1, 2. Соответствующие детали обозначены теми же ссылочными позициями, что и на фиг.1, 2.
С обоими поводковыми штифтами 13 могут быть сопряжены также более двух режущих узлов. В частности, с одним из обоих поводковых штифтов 13 помимо узла срезающих ножей может быть сопряжен также средний режущий узел для длинных волос, как он расположен в режущих головках современных бритв между обоими боковыми параллельными блоками срезающих ножей. Как видно из фиг.5, средний режущий узел (не показан) может посредством качающегося мостика 20 взаимодействовать с одним из поводковых штифтов 13. Качающийся мостик 20 содержит для этого двигательный элемент 21, который установлен приблизительно по центру над торцом ротора 4 с возможностью линейного перемещения параллельно направлению движения ножевых узлов, на фиг.5, следовательно, слева направо и наоборот. Двигательный элемент 21 содержит поводок 22, приводимый в зацепление со средним режущим узлом и передающий на него движение двигательного элемента 21. Сам двигательный элемент 21 движется одним из поводковых штифтов 13. Для этого двигательный элемент 21 содержит жесткий элемент 23 сопряжения, жестко соединенный с двигательным элементом 21 и находящийся в зацеплении с поводковым штифтом 13. Для этого элемент 23 сопряжения имеет выемку 24, в которую входит поводковый штифт 13. Выемка 24 выполнена при этом в виде продольного паза, продольная ось которого проходит перпендикулярно направлению движения двигательного элемента 21, с тем, чтобы компенсировать долю приводного движения поводкового штифта 13 поперек направления движения двигательного элемента 21, возникающую за счет вращательного движения ротора 4. В направлении движения двигательного элемента 21 зацепление между элементом 23 сопряжения и поводковым штифтом 13, однако, не имеет люфта, т.е. сопряжение качающегося мостика 20 с ротором 4 в этом направлении движения кинематически жесткое, с тем, чтобы уменьшить вибрации и шумообразование и обеспечить точное колебание ротора 4. Качающийся мостик 20 установлен посредством листовых пружин 25 с возможностью квазилинейного движения. Как видно из фиг.6, листовые пружины 25 проходят, в основном, перпендикулярно двигательному элементу 21, с концами которого они соединены соответственно одним из своих концов. Листовые пружины 25 проходят сбоку вдоль статора 2 вниз и своим соответственно другим концом прочно установлены на соответствующем упоре, например на корпусе бритвы. Как видно из фиг.6, качающийся мостик 20 снабжен прижимной пружиной 26, выдавливающей средний режущий узел (не показан) вверх. При нагрузке средний режущий узел может отклоняться немного вниз. Прижимная пружина 26 должна создавать при этом меньшее усилие, чем прижимные пружины блоков срезающих ножей, расположенных с обеих сторон среднего режущего узла. Прижимная пружина 26 имеет при этом преимущественно два колена в виде листовой пружины, которые проходят над двигательным элементом 21 и упруго раздвинуты им вверх.
Другое выполнение, согласно изобретению, электродвигателя 200 с постоянными магнитами изображено на фиг.7 и 8. Соответствующие предыдущим формам выполнения детали обозначены теми же ссылочными позициями. У этой формы выполнения роторный узел 204 обращен своим торцом к ножевым узлам не вертикально, а расположен горизонтально с поворотом на 90o, так что одна периферийная сторона роторного узла 204 обращена к ножевым узлам бритвы. Устройство 12 сопряжения расположено в соответствии с этим не на торце роторного узла 204, а на обращенной к ножевым узлам периферийной стороне. Устройство 12 сопряжения также содержит поводковые штифты 13, которые соответствующим образом находятся в зацеплении с ножевыми узлами и приводят их в действие. Как видно из фиг.7 и 8, поводковые штифты 13 расположены перпендикулярно периферийной стороне роторного узла 204; они перпендикулярны оси 8 вращения роторного узла 204, выступают от периферийной стороны в радиальном направлении за нее, проходят насквозь между одним из обоих промежутков между обоими полюсными башмаками статора и выступают за статор.
Роторный узел 204 может быть выполнен, в принципе, в виде интегрированного узла. В этом случае поводковые штифты 13 устройства 12 сопряжения также жестко соединены между собой. Ножевые узлы, соответствующие различным поводковым штифтам 13, колеблются в этом случае равнофазно в одном направлении. Это имеет преимущество жесткой связи различных ножевых узлов.
Преимущественно, однако, роторный узел 204 содержит два независимых друг от друга ротора 204а, 204b (фиг.8), движущихся независимо друг от друга. Для достижения компактного расположения и простой конструкции роторного узла 204 оба ротора 204а, 204b ориентированы предпочтительным образом коаксиально друг другу и расположены на одной общей оси 8 вращения. Для достижения особенно низковибрационной работы электродвигателя роторы 204а, 204b намагничены противоположно, т.е. постоянные магниты 11 расположены на обоих роторах 204а, 204b во встречной ориентации (фиг.8). В соответствии с этим роторы 204а, 204b и, тем самым, соответственно присоединенные ножевые узлы движутся всегда навстречу друг другу, благодаря чему взаимно компенсируются инерции не только ножевых узлов, но и роторов. Таким образом, эффективно уменьшаются колебания корпуса и шумообразование.
Как видно из фиг.7, магнитопровод 7, окруженный обмоткой 3 возбуждения, лежит в плоскости, которая не перпендикулярна оси 8 вращения, как у выполнения на фиг.1, а параллельна ей.
Возвратное устройство 214 содержит у выполнения на фиг.7, 8 листовые пружины 215, жестко соединенные одним из своих концов с возвратным упором 216. Своими другими концами они соединены посредством возвратного элемента 217 сопряжения на удалении от оси 8 вращения с соответственно одним из роторов 204а, 204b. Возвратные пружины 216 нагружают при этом соответствующий ротор возвратным усилием, которое возвращает ротор после отклонений в исходное положение. Хотя это специально не показано, роторы могут быть возвращены в свое исходное положение также другими возвратными пружинами, в частности, для этого может быть использована также спиралеобразная торсионная пружина аналогично фиг.3.
На фиг. 9 подробно изображено выполнение согласно изобретению электробритвы, у которой предусмотрено приводное устройство с электродвигателем 100 с постоянными магнитами аналогично выполнению на фиг.3, 4 с находящимся в стоячем положении ротором и спиралеобразной торсионной пружиной для возврата ротора 4. Электробритва содержит корпус 27, в котором размещены аккумулятор 28 для токопитания привода и блок 29 управления электродвигателем 100 с постоянными магнитами (фиг. 9). На верхнем конце корпуса 27 предусмотрена поворотная головка 20, установленная на нем с возможностью поворота вокруг оси 31 поворота относительно корпуса 27. В поворотной головке 30 предусмотрена пара режущих узлов 32, которые расположены под расположенной на торце поворотной головки 30 режущей сеткой 33 с возможностью поворота вместе с поворотной головкой 30. Режущие узлы 32 приводятся в возвратно-поступательное вибрирующее движение электродвигателем 100 с постоянными магнитами в направлении, параллельном оси 32 поворота.
Как видно из фиг.9, приводное устройство для режущих узлов 32 интегрировано в поворотную головку 30, так что оно может поворачиваться возвратно-поступательно вместе с поворотной головкой 30. Поворотная головка 30 имеет для этого приводное гнездо 34, в котором размещен электродвигатель 100 с постоянными магнитами. Электродвигатель 100 с постоянными магнитами прочно соединен с поворотной головкой 30. Приводное гнездо 34 выполнено приблизительно соответствующим внешнему контуру статора 2, так что он может быть вставлен в приводное гнездо 34 (фиг.9, 10). Приводное гнездо 34 имеет на одной стороне упорный выступ 35, к которому может быть смещен электродвигатель 100 с постоянными магнитами. Электродвигатель 100 с постоянными магнитами фиксируют посредством крепежной пластины 36, которую закрепляют в приводном гнезде 34 и которая наподобие выступа закрывает его (фиг.10). Ротор 4 в зоне обоих своих торцов соединен посредством соответствующей опоры 37 с возможностью вращения с осью 8 вращения. Ось 8 вращения соединена на обоих торцах ротора 4 с подшипниковыми щитами 9, которые радиально выступают за ротор 4 и прочно соединены со статором 2. Вместо опоры ротора с возможностью вращения на оси 8 вращения последняя может быть, само собой, прочно соединена с ротором и сочленена с возможностью вращения с подшипниковыми щитами 9.
Режущие узлы 32 сидят непосредственно на поводковых штифтах 13, выступающих в направлении торца поворотной головки 30 (фиг.13), и приводятся в действие ими с вибрацией в соответствии с движением ротора 4. Поводковый механизм для сопряжения среднего режущего узла 38 на фиг.13 не показан; из обоих режущих узлов 32 изображен только один.
В качестве возвратного устройства 114 для ротора 4 приводное устройство содержит возвратную пружину 115, расположенную между режущими узлами 32 и верхним торцом ротора 4 (фиг.10, 13, 16, 17). Возвратная пружина 115 более подробно изображена на фиг.20. Она имеет крепежный участок 39 для закрепления на роторе 4 и спиральный участок 40, который охватывает крепежный участок 39. Пружина, в целом, плоская. Как видно из фиг.20, крепежный участок 39 выполнен, в основном, Z-образным и имеет пару противоположных друг другу, в основном, взаимно параллельных участков 41 зацепления, с помощью которых возвратную пружину 15 можно натянуть между поводковыми штифтами 13. Участки 41 зацепления имеют при этом чашеобразные углубления, предусмотренные для размещения поводковых штифтов 13 (фиг.17). Спиральный участок 40 содержит пару спиральных плечей 42, которые спиралеобразно простираются наружу от участков 41 зацепления (фиг.20). Концы спиральных плечей 42 прочно соединены с поворотной головкой 30. Состоящая из пружинной стали возвратная пружина 115 оказывает на поводковые штифты 13 возвратное усилие, которое может возвращать ротор 4, когда он отклонен, в исходное положение, так что он может совершать вращательные колебания вокруг исходного положения. Возвратная пружина 115 в сочетании с массой ротора 4 и массой режущих узлов 32 выполнена при этом таким образом, что резонансная частота системы пружина - масса очень высока и лежит преимущественно в пределах около 104/мин.
Преимущественно один или несколько роторов предусмотрены с несколькими (в общей сложности, в частности, двумя) ножевыми узлами или ножевыми блоками, которые образуют по сравнению со статором колебательную систему с отдельными массами Ml, M2 и отдельными постоянными K1, K2 усилия, причем отношение из постоянной усилия и массы для одной колебательной системы поддерживается приблизительно равным отношению для другой колебательной системы. Массы в колебательных системах приблизительно равны друг другу.
Ниже более подробно поясняются управление и регулирование электродвигателя с постоянными магнитами. Описанными выше формами выполнения электродвигателя с постоянными магнитами можно управлять и регулировать таким же образом.
Электродвигатель с постоянными магнитами снабжается электрической энергией низкого напряжения из аккумулятора, причем он питается, однако, не постоянным, а включенным напряжением. Блок 29 управления снабжает обмотку 3 возбуждения биполярными импульсами напряжения (U на фиг.22). Импульсы напряжения возбуждают ротор приблизительно в точках прохождения колебания через нуль, там где скорость максимальна. За счет положительных и отрицательных импульсов можно ускорить ротор 4 при возвратно-поступательном движении каждый раз в нужном направлении. Для того чтобы блок 29 управления мог точно управлять колебанием ротора, необходимо как можно точнее детектировать мгновенное колебательное состояние ротора 4 и выработать соответствующий сигнал, который может иметь обратную связь с блоком 29 управления. Ниже обработка сигнала регистрирующего устройства 18 поясняется более подробно.
С помощью сенсорной катушки 19 регистрируют магнитный поток, идущий от постоянных магнитов 11 и вызывающий в сенсорной катушке 19 индуктированное напряжение. На фиг.21С изображена временная характеристика, индуктируемая в сенсорной катушке 19, когда ротор 4 колеблется с показанной на фиг.21А скоростью вращения. На сигнал датчика колебаний, т.е. индуктированное в сенсорной катушке 19 напряжение, наложены паразитные составляющие. Фильтр 43 нижних частот на входе устройства обработки сигналов демпфирует гармоники высшего порядка для получения сигнала, пропорционального скорости вращения ротора. Этого уменьшения паразитных составляющих, однако, еще недостаточно. Дополнительно к потоку постоянных магнитов 11 магнитный поток обмотки 3 возбуждения, пропорциональный току электродвигателя, т.е. току в обмотке 3 возбуждения, индуктирует в сенсорной катушке 19 напряжение, основная волна которого также содержится в выходном сигнале входного фильтра. Если бы основная волна этой составляющей тока осталась бы неучтенной, то она исказила бы в качестве ошибочной доли в сигнале сенсорной катушки 19 регистрацию колебания ротора 4 и вызвала бы сбои в работе электродвигателя. Компенсирующее устройство для компенсации этой ошибочной доли содержит токовый датчик для регистрации тока в обмотке 3 возбуждения, с помощью которого можно отдельно детектировать ток в обмотке 3 возбуждения. Этот токовый датчик может состоять из магнитомягкого кольца, через который пропущен токоподводящий провод электродвигателя. Протекающий ток электродвигателя индуктирует во втором проводе, который может быть размещен на кольце в несколько витков, напряжение, вырабатываемое в качестве сигнала токового датчика и имеющее показанную на фиг.21D временную характеристику, когда ток Imot электродвигателя в катушке 3 возбуждения имеет показанную на фиг.21В характеристику. У показанной на фиг.21В характеристики тока Imot электродвигателя следует обратить внимание на то, что при управлении обмоткой 3 возбуждения импульсами напряжения, обозначенными на фиг.21В буквами PWM, ток электродвигателя, вызванный скачкообразными прямоугольными импульсами напряжения, из-за индуктивности обмотки 3 возбуждения возрастает не скачкообразно, а принимает показанную на фиг.21В характеристику в форме акульего плавника.
Индуктированное в токовом датчике напряжение пропорционально характеристике токовой составляющей, т.е. ошибочной доли, в сигнале сенсорной катушки 19. При этом следует обратить внимание на то, что за счет конструкции электродвигателя влиянием угла вращения ротора 4 на характеристику потока возбуждения можно пренебречь. Электродвигатель 100 с постоянными магнитами использует ротор 4 кругообразного сечения и постоянные магниты 11, магнитная проницаемость которых лишь незначительно отличается от свойства воздушного зазора. За счет вычитания сигнала токового датчика на фиг.21D из выходного сигнала сенсорной катушки 19 на фиг.21С после их соответствующей оценки можно почти полностью компенсировать ошибочную долю. Для этого компенсирующее устройство содержит соответствующий блок вычитания сигнала токового датчика из сигнала сенсорной катушки 19.
После низкочастотной фильтрации разности между обоими сигналами посредством фильтра нижних частот получается характеристика сигнала, которая в любых эксплуатационных состояниях электродвигателя независимо от степени заполнения, т.е. ширины импульсов напряжения, является мерой скорости вращения ротора. Характеристика сигнала изображена на фиг.21Е и обозначена как полезный сигнал датчика. Этим при разных нагрузках обеспечивается работа электродвигателя с постоянной скоростью режущих узлов при его резонансной частоте.
На фиг. 23 изображена блок-схема всей системы из электродвигателя 100 с постоянными магнитами и блока 29 управления. Как видно из фиг.23, верхняя сигнальная цепь может эксплуатироваться между работой электродвигателя в автоколебательной петле или работой электродвигателя с постоянной частотой, задаваемой осциллятором 44. Нижняя сигнальная цепь представляет регулирование колебательного состояния ротора 4.
Входной фильтр 43 содержит описанный выше фильтр нижних частот и компенсирующее устройство для компенсации ошибочной доли в сигнале сенсорной катушки 19 и осуществляет согласование уровня сигнала датчика. Если на полезный сигнал датчика наложены паразитные величины, например, верхние гармоники, то они демпфируются во входном фильтре 43.
При работе приводного устройства в автоколебательной петле частота колебаний электродвигателя 100 с постоянными магнитами определяется частотой, при которой фазовый сдвиг между точками 1 и 1' сигнальной цепи на фиг.23 при открытой петле составляет 360o. С помощью регулируемой фазовой задержки 45 между точками 2 и 3 сигнальной цепи эта частота корректируется до резонансного максимума. Последующий генератор 46 сигналов вырабатывает синхронный с колебанием ротора сигнал, который определяет временную последовательность биполярных импульсов напряжения привода, приводящих в действие через силовой каскад 47, например, полный мост, электродвигатель 100.
При управлении постоянной частотой электродвигателя осциллятор 44 устанавливает частоту генератора сигналов и, тем самым, временную последовательность биполярных импульсов напряжения, причем частота устанавливается преимущественно приблизительно на резонансную частоту системы пружина - масса из ротора 4 и возвратного устройства 114.
Для регулирования работы электродвигателя отфильтрованный полезный сигнал датчика на фиг.21Е подают к детектору 48, который по этому сигналу определяет фактическое значение регулируемой величины состояния. При периодической характеристике сигнала на фиг.21Е им является преимущественно детектор пиковых значений, детектирующий соответствующее пиковое значение этого сигнала. Однополупериодное выпрямление обеспечивает детектирование одного фактического значения на период колебаний; двухполупериодное выпрямление обеспечивает два значения сигнала в момент отсчета на период и, тем самым, более быструю реакцию регулирования, например, на толчки нагрузки. В качестве фактического значения можно использовать также среднее значение полезного сигнала датчика, например, эффективное значение. Преимущественно, однако, используют амплитуду полезного сигнала датчика. Детектированное фактическое значение подают к регулятору 49, который может быть выполнен аналоговым, например, в виде ПИ-регулятора. В качестве альтернативы можно произвести аналого-цифровое преобразование детектированной величины состояния и выполнить цифровое регулирование с использованием переключающего устройства или М-контроллера.
Для управления колебательным состоянием выходной сигнал генератора сигналов модулируют регулятором 49. Модуляция может быть осуществлена при этом, в принципе, различным образом, например, посредством фазово-импульсной модуляции (РРМ), амплитудно-фазовой модуляции (РАМ) или широтно-импульсной модуляции (PWM). Ниже более предпочтительная широтно-импульсная модуляция более подробно поясняется с помощью детальной блок-схемы автоколебательного управления согласно фиг.24. Здесь хорошо видна петлевая структура системы. На левой стороне диаграммы сигналы регистрирующего устройства 18 через входной фильтр 43 возвращаются в блок 29 управления. Полезный сигнал датчика подается к фазовращателю 45, который определяет фазовую задержку и устанавливает, тем самым, рабочую частоту электродвигателя.
Для вырабатывания биполярного сигнала импульса напряжения полезный сигнал датчика в генераторе 46 сигналов преобразуют сначала в синхронный прямоугольный сигнал. Это происходит с использованием компаратора 50 (фиг.24). Прямоугольный сигнал, используемый для генерирования биполярных импульсов напряжения, должен в любом рабочем состоянии электродвигателя находиться в постоянном фазовом отношении с колебанием ротора 4. Прямоугольный сигнал вырабатывается компаратором 50 синхронно с прохождениями полезного сигнала датчика через нуль, как это поясняется на фиг.25 и 26 с помощью двух полуволн полезного сигнала датчика. Если высшие гармоники в полезном сигнале датчика достаточно демпфированы входным фильтром 43, то эти паразитные составляющие также в зоне прохождений через нуль малы по сравнению с полезным сигналом датчика, и возникает изображенная на фиг.25 характеристика.
Если оставшиеся доли высших гармоник слишком велики, то это, как показано на фиг. 26, может привести к многократным прохождениям через нуль в пределах одного полупериода колебаний ротора 4. Таким образом, возник бы ошибочный прямоугольный сигнал. По этой причине компаратор 50 выполняют с гистерезисом, так что независимо от оставшихся паразитных величин в полезном сигнале датчика возникает отвечающий требованиям прямоугольный сигнал.
Прямоугольный сигнал подается к генератору 51 сигналов, выполненному в виде полосового фильтра (фиг.24). Угловые частоты полосового фильтра выбраны таким образом, что полосовой фильтр выдает приблизительно треугольный выходной сигнал. Если подаваемый прямоугольный сигнал из-за паразитных составляющих в полезном сигнале датчика имеет асимметричный коэффициент заполнения, то отделение долей постоянного напряжения в полосовом фильтре обеспечивает симметричную опорному потенциалу характеристику треугольного сигнала.
Выработанный генератором 51 сигналов треугольный сигнал сравнивается в последующем каскаде посредством двух компараторов 52, 53 с двумя переменными сигналами постоянного напряжения (фиг. 27). За счет пересечений сигнала постоянного напряжения с треугольным сигналом устанавливается ширина биполярных импульсов напряжения. Таким образом, из верхнего сигнала постоянного напряжения и треугольного сигнала формируется положительный импульс напряжения, а из нижнего сигнала постоянного напряжения и треугольного сигнала - отрицательный импульс напряжения. Ширину этих импульсов напряжения можно варьировать, т. е. ширину импульсов можно модулировать (широтно-импульсная модуляция) путем сдвига верхнего уровня постоянного напряжения вверх или вниз, а нижнего уровня постоянного напряжения одновременно соответственно вниз или вверх. Благодаря этому виду широтно-импульсной модуляции достигается симметричное вершинам треугольного сигнала расширение или сужение приводных импульсов (фиг.27). Из-за постоянного фазового отношения между полезным сигналом датчика и треугольным сигналом даже при изменении коэффициента заполнения сохраняется жесткая фазовая связь между возвращенным полезным сигналом датчика регистрирующего устройства 18 и основной волной приводных импульсов. Это обеспечивает при разных нагрузках работу электродвигателя в постоянном фазовом отношении между приводным напряжением и скоростью ротора и, тем самым, в резонансе. За счет этого повышается КПД привода по сравнению с широтно-импульсной модуляцией, при которой начальный момент приводных импульсов задан, а ширина приводных импульсов устанавливается только за счет варьирования конечного момента, что в соответствии с этим вызывает зависимый от коэффициента заполнения фазовый сдвиг между возвращенным сигналом датчика и основной волной приводных импульсов.
Для регулирования колебательного состояния электродвигателя 100 с постоянными магнитами отфильтрованный и освобожденный от ошибочных долей полезный сигнал датчика регистрирующего устройства 18 подается к детектору 54 пиковых значений, который определяет соответствующую амплитуду колебаний полезного сигнала датчика. Это значение амплитуды на основе компенсации ошибочных долей является непосредственной мерой максимальной скорости вращения ротора 4. Детектированное значение амплитуды сравнивается с заданным значением, и разность сигналов подается к подходящему регулятору, например, ПИ-регулятору 49. Выходной сигнал регулятора управляет одновременным сдвигом обоих уровней постоянного напряжения, которые определяют ширину приводных импульсов и вызывают, таким образом, регулирование амплитуды колебаний.
В качестве альтернативы аналоговому регулированию можно, согласно другому выполнению изобретения, реализовать функцию треугольного сигнала посредством цифровой схемы в виде прямого и обратного счетчика. В последующем каскаде показание счетчика сравнивается с помощью цифровых компараторов с выходным значением цифрового регулятора, и таким образом генерируется биполярный импульс напряжения.
Подаваемое к регулятору 49 заданное значение скорости вращения может быть постоянно задано. В одной форме выполнения изобретения заданное значение может варьироваться владельцем электробритвы в установленных пределах дискретными ступенями или бесступенчато. За счет этого владелец электробритвы может установить скорость режущего механизма в заданных пределах так, чтобы для каждого типа кожи достигалось оптимальное бритье с минимальным раздражением кожи. В качестве альтернативы можно, учитывая функциональную связь между скоростью и амплитудой колебаний режущего механизма, выбрать при данной частоте колебаний амплитуду колебаний. Регулятор рассчитывает тогда соответствующую скорость для данной частоты колебаний и управляет подводимой к приводу энергией так, что при разных нагрузках амплитуда колебаний остается постоянной.
Особенно предпочтительным у приводного устройства согласно изобретению является тот факт, что регулирование колебаний может происходить очень быстро. Уже от одного полуколебания до следующего можно повлиять на ширину приводных импульсов. Это приводит к постоянному качеству и сокращению времени бритья. У традиционных приводов с недостаточно жесткой связью между осью электродвигателя и режущим механизмом подобное быстрое регулирование невозможно. Поэтому у этих приводов за счет регулирования достигается лишь среднее по времени постоянное колебание.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОБРИТВА | 1998 |
|
RU2175602C1 |
| ЭЛЕКТРОБРИТВА | 2007 |
|
RU2438860C2 |
| Устройство для накопления нити при ее подаче к текстильной машине | 1984 |
|
SU1203152A1 |
| ЭЛЕКТРИЧЕСКАЯ БРИТВА И РЕЖУЩАЯ СИСТЕМА ДЛЯ ЭЛЕКТРИЧЕСКОЙ БРИТВЫ | 1993 |
|
RU2122491C1 |
| ПРИБОР ДЛЯ УДАЛЕНИЯ ВОЛОС | 2006 |
|
RU2424895C2 |
| ПРИБОР ДЛЯ УДАЛЕНИЯ ВОЛОС | 2006 |
|
RU2402418C2 |
| ЭЛЕКТРОБРИТВА | 1998 |
|
RU2170660C1 |
| Малогабаритный вибрационный бытовой прибор для удаления волосяного покрова тела | 1989 |
|
SU1748639A3 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |

Приводное устройство содержит электродвигатель с постоянными магнитами, который включает в себя статор с обмоткой возбуждения и расположенный в поле статора, установленный с возможностью вращения вокруг оси вращения ротор, по меньшей мере, с одним постоянным магнитом, возвратное устройство для возврата ротора в исходное положение с возможностью колебания ротора вокруг исходного положения, устройство сопряжения для сопряжения ротора с рабочим узлом, причем устройство сопряжения соединено с ротором на расстоянии от оси вращения, регистрирующее устройство для регистрации колебательных движений ротора и блок управления для управления электродвигателем с постоянными магнитами в зависимости от зарегистрированного колебательного движения. При этом предусмотрены средства управления частотой для управления электродвигателем с постоянными магнитами с частотой, примерно соответствующей резонансной частоте ротора. Устройство имеет простую, компактную конструкцию и обеспечивает стабильную эксплуатацию с высоким КПД. 2 с. и 30 з.п.ф-лы, 27 ил.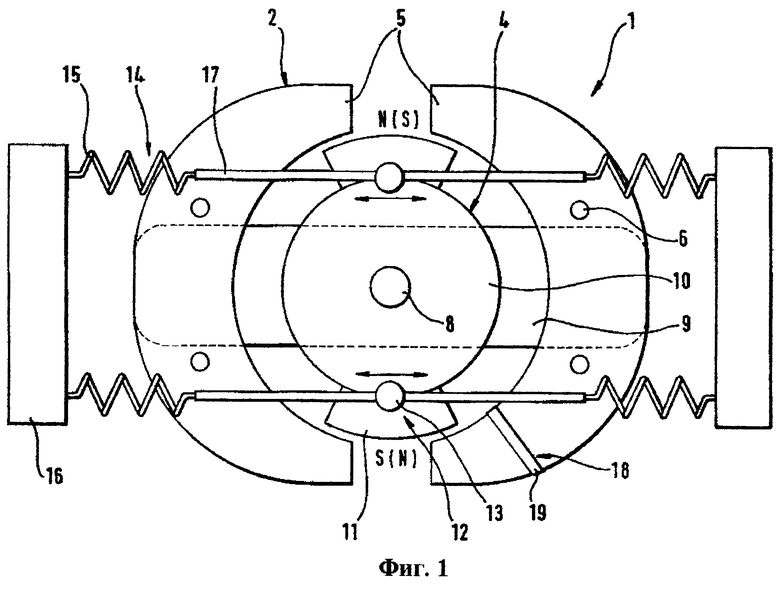
| DE 4117225 А1, 03.12.1992 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 5736797 A, 07.04.1998 | |||
| DE 3139523 А1, 21.04.1983 | |||
| Малогабаритный вибрационный бытовой прибор для удаления волосяного покрова тела | 1989 |
|
SU1748639A3 |

