Изобретение относится к области измерительной техники, преимущественно к области диагностики передач зацеплением, работающих с динамически изменяющимися моментами нагружения и частотами вращения.
Известно устройство для виброакустической диагностики передач зацеплением (патент RU 2125248, кл. G 01 Н 17/00, опубл. 1997), содержащее каналы выделения измерительной информации, состоящие из последовательно соединенных предварительного усилителя, регулируемого полосового фильтра, дополнительного усилителя с автоматической регулировкой усиления и блока распознавания сигналов; блок формирования импульса, коммутатор, индикатор, программируемый вычислитель, регистрирующее устройство и блок команд.
Известное устройство в основном ориентировано на анализ акустических характеристик механизмов циклического действия - двигателей внутреннего сгорания.
Его использование для диагностирования передач зацеплением, работающих с динамически изменяющимися моментами нагружения и частотами вращения, оказывается недостаточно эффективным, так как возможности расширенного анализа контролируемых параметров на основе их сканирования узкополосными фильтрами с различной полосой пропускания оказываются весьма ограниченными из-за достаточно большой длительности этого процесса и весьма быстрых изменениях режимов функционирования диагностируемого объекта. Достоверность и информативность полученных результатов, особенно при использовании в качестве диагностических признаков информации, полученной при обработке временных реализаций, зафиксированных в процессе взаимодействия зубчатых колес за время, кратное их полным оборотам, и при повороте на угловой шаг их отдельных пар зубьев, резко снижается.
Из известных наиболее близким по технической сущности к предлагаемому является устройство для диагностики передач зацеплением (свидетельство на полезную модель RU 20964, кл. G 01 Н 17/00, опубл. 2002), включающее по меньшей мере один канал выделения измерительной информации, содержащий тракт контроля виброакустического сигнала, состоящий из последовательно соединенных первичного преобразователя виброкустического сигнала, первого регулируемого усилителя, регулируемого полосового фильтра и первого аналого-цифрового преобразователя, тракт контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения, второго регулируемого усилителя и второго аналого-цифрового преобразователя, и контроллер; программируемый вычислитель, индикатор и регистрирующее устройство, соответствующие входы которых связаны с соответствующими выходами программируемого вычислителя.
Устройство ориентировано на анализ виброакустических характеристик передач зацеплением в основном при стендовых испытаниях или в условиях эксплуатации на стационарных режимах работы диагностируемого объекта. При его использовании для диагностирования передач зацеплением, работающих с динамически изменяющимися моментами нагружения и частотами вращения, возможности расширенного анализа контролируемых параметров на основе их сканирования узкополосными фильтрами с различной полосой пропускания оказываются весьма ограниченными из-за достаточно большой длительности этого процесса при весьма быстрых изменениях режимов функционирования диагностируемого объекта, что снижает достоверность полученных результатов и эффективность диагностирования, в особенности при использовании в качестве диагностических признаков информации, полученной при обработке временных реализаций, зафиксированных в процессе взаимодействия зубчатых колес за время, кратное их полным оборотам, и при повороте на угловой шаг их отдельных пар зубьев.
Задачей изобретения является повышение эффективности диагностирования передач зацеплением, работающих при динамически изменяющихся режимах функционирования.
Решение поставленной задачи достигается тем, что в устройство для виброакустической диагностики передач зацеплением, включающее по меньшей мере один канал выделения измерительной информации, содержащий измерительный тракт контроля виброакустического сигнала, состоящий из последовательно соединенных первичного преобразователя виброакустического сигнала, первого регулируемого усилителя, регулируемого полосового фильтра и первого аналого-цифрового преобразователя, измерительный тракт контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения, второго регулируемого усилителя и второго аналого-цифрового преобразователя, и контроллер; программируемый вычислитель, индикатор и регистрирующее устройство, входы которых связаны с соответствующими выходами программируемого вычислителя, согласно техническому решению в каждый канал выделения измерительной информации введен дополнительный тракт формирования электрического сигнала, включающий цифроаналоговый преобразователь, программно-управляемый избирательный фильтр на основе резонансных цепей и третий регулируемый усилитель, при этом цифроаналоговый преобразователь связан входом и первым выходом с соответствующими выходом и входом программируемого вычислителя, вторым выходом цифроаналоговый преобразователь связан с первым входом программно-управляемого избирательного фильтра на основе резонансных цепей, третьим выходом цифроаналоговый преобразователь связан с первый входом третьего регулируемого усилителя, второй вход последнего связан с выходом программно-управляемого избирательного фильтра на основе резонансных цепей, третий вход третьего регулируемого усилителя связан с соответствующим выходом контроллера, первый выход третьего регулируемого усилителя связан с соответствующим входом первого аналого-цифрового преобразователя, второй выход третьего регулируемого усилителя связан с соответствующим входом регулируемого полосового фильтра, второй вход программно-управляемого избирательного фильтра на основе резонансных цепей связан с соответствующим выходом контроллера.
Повышение эффективности диагностирования передач зацеплением, работающих при динамически изменяющихся режимах функционирования, достигается за счет следующего.
Использование предлагаемого технического решения позволяет разделить во времени процессы съема диагностической информации и ее предварительной обработки сканированием узкополосным фильтром. Сканирование зафиксированного на программируемом вычислителе сигнала осуществляется при его многократном воспроизведении трактом формирования электрического сигнала. Это обеспечивает получение необходимого для комплексного анализа числа временных реализаций, зафиксированных в процессе взаимодействия зубчатых колес за время, кратное их полным оборотам и при повороте на угловой шаг отдельных пар зубьев. При этом анализируются данные, полученные на одном скоростном и нагрузочном режиме функционирования диагностируемого объекта. Их результаты сопоставимы, что позволяет существенно повысить точность, информативность и достоверность полученных данных.
Введение в тракт программно-управляемого избирательного фильтра на основе резонансных цепей, например полосового фильтра со сложной отрицательной обратной связью (см., например, Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство. Пер. с нем. - Мир, 1982, 512 с., ил., с. 214, рис. 13.27), обеспечивает выявление информативных, но маломощных компонентов исходного сигнала, зафиксированного в определенном динамическом диапазоне, определяемом в данном случае наиболее мощной компонентой. Достоинством приведенного варианта фильтра является возможность изменения частоты варьированием величиной только одного сопротивления, что создает определенные удобства при создании средств управления и программного обеспечения.
На фиг. 1 показано устройство для виброакустической диагностики передач зацеплением.
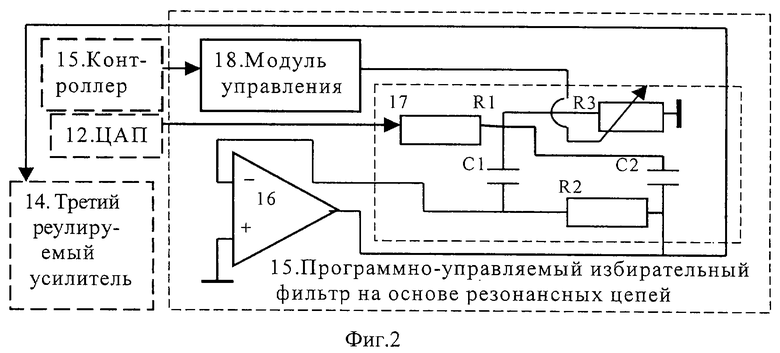
На фиг. 2 показан пример исполнения программно-управляемого избирательного фильтра на основе резонансных цепей.
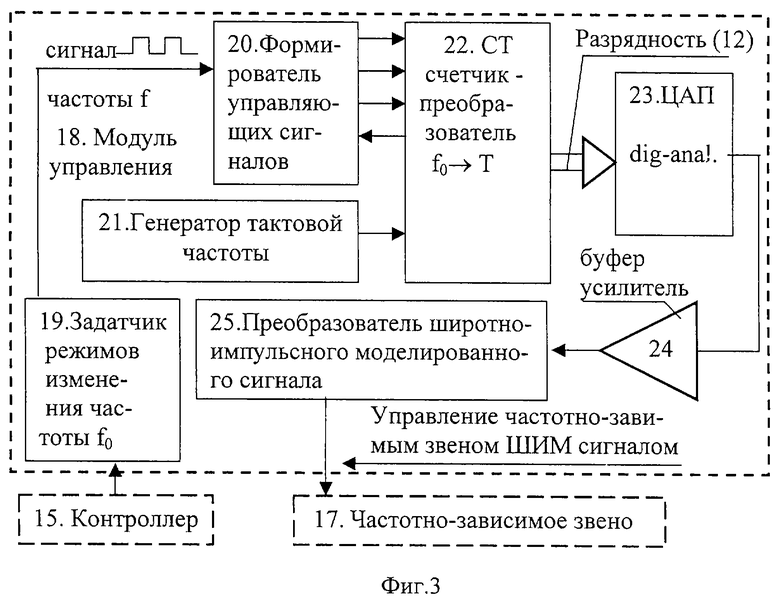
На фиг. 3 показан пример исполнения модуля управления программно-управляемого избирательного фильтра на основе резонансных цепей.
Устройство состоит (фиг.1) из канала выделения измерительной информации 1, программируемого вычислителя 2, регистрирующего устройства 3, вход которого связан с первым выходом программно-регулируемого вычислителя 2 и индикатора 4, вход которого связан со вторым выходом программируемого вычислителя 2.
Канал выделения измерительной информации 1 включает:
- измерительный тракт контроля виброакустического сигнала, состоящий из последовательно соединенных первичного преобразователя виброакустического сигнала 5, первого регулируемого усилителя 6, первый вход которого связан с выходом первичного преобразователя виброакустического сигнала 5, регулируемого полосового фильтра 7, первый вход которого связан с выходом первого регулируемого усилителя 6, первого аналого-цифрового преобразователя (АЦП) 8, первый вход которого связан с выходом регулируемого полосового фильтра 7;
- измерительный тракт для контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения 9, второго регулируемого усилителя 10, первый вход которого связан с выходом датчика частоты вращения 9, второго АЦП 11, первый вход которого связан с выходом второго регулируемого усилителя 10;
- тракт формирования электрического сигнала, включающий цифро-аналоговый преобразователь (ЦАП) 12, вход которого и первый выход связаны с соответствующими третьим выходом и первым входом программируемого вычислителя 2, программно-управляемый избирательный фильтр на основе резонансных цепей 13, первый вход которого связан со вторым выходом ЦАП 12, третий регулируемый усилитель 14, первый вход которого связан с третьим выходом ЦАП 12, второй вход третьего регулируемого усилителя 14 связан с выходом программно-управляемого избирательного фильтра на основе резонансных цепей 13, первый выход третьего регулируемого усилителя 14 связан с третьим входом первого АЦП 8, второй выход регулируемого усилителя 14 связан с третьим входом регулируемого полосового фильтра 7;
- контроллера 15, первый вход и первый выход которого связан с соответствующими четвертым выходом и вторым входом программируемого вычислителя 2, второй и третий входы контроллера 15 связаны с ответными выходами первого АЦП 8 и второго АЦП 11, второй выход контроллера 15 связан со вторым входом первого регулируемого усилителя 6, третий выход контроллера 15 связан со вторым входом второго регулируемого усилителя 10, четвертый выход контроллера 15 связан с третьим входом третьего регулируемого усилителя 14, пятый выход контроллера 15 связан с третьим входом регулируемого полосового фильтра 7, шестой выход контроллера 15 связан с третьим входом первого АЦП 8, седьмой выход контроллера 15 связан со вторым входом второго АЦП 11, восьмой выход контроллера 15 связан со вторым входом программно-управляемого избирательного фильтра на основе резонансных цепей 13.
Программно-управляемый избирательный фильтр на основе резонансных цепей 15 (фиг.2) состоит из усилительного звена 16, частотно-зависимого звена 17 с управляемой передаточной функцией на основе RC-цепи и модуля управления 18. Выход усилительного звена 16 связан со вторым входом третьего регулируемого усилителя 14, первый вход частотно-зависимого звена 17 связан со вторым выходом ЦАП 12, выход частотно-зависимого звена 17 связан со вторым входом третьего регулируемого усилителя 14 и выходом усилительного звена 16. Вход модуля управления 18 связан с восьмым выходом контроллера 15. Выход модуля управления 18 связан со вторым выходом частотно-зависимого звена 17 и через него с переменным резистором R3 частотно-зависимого звена 17.
Модуль управления может быть выполнен по схеме, показанной на фиг.3.
Он состоит из задатчика 19 режимов изменения частоты, вход которого связан с восьмым выходом контроллера 15, формирователя управляющих сигналов 20, первый вход которого связан с выходом задатчика режимов 19, генератора частот 21, счетчика-преобразователя 22, первая группа входов и первый выход которого связаны с соответствующими выходами и вторым входом счетчика-преобразователя 20, второй вход счетчика-преобразователя 22 связан с выходом генератора часто 21, второго ЦАП 23, двенадцатиразрядный вход которого связан со вторым выходом счетчика-преобразователя 22, буферусилителя 24, вход которого связан с выходом второго ЦАП 23, преобразователя 25 широтно-импульсного моделированного (ШИМ) сигнала, вход которого связан с выходом буферусилителя 24. Выход преобразователя 25 связан со вторым входом частотно-зависимого звена 17 и через него связанным с переменным резистором R3.
Устройство может быть снабжено одним, двумя и большим числом каналов выделения измерительной информации, идентичных каналу 1.
Устройство работает следующим образом.
При диагностировании передачи зацепления, работающей при динамически изменяющихся режимах функционирования, электрический аналоговый сигнал, снимаемый в течение минимально возможного интервала времени (времени 2-3 оборотов выходного вала) с первичного преобразователя виброакустических сигналов 5 канала выделения измерительной информации 1, поступает в первый регулируемый усилитель 6, где усиливается до заданного уровня (определение требуемого уровня усиления осуществляется с использованием программируемого вычислителя 2), отфильтровывается регулируемым (от контроллера 15) полосовым фильтром 7, настроенным на полосу пропускания, охватывающую весь возможный Δf диапазон наиболее информативных частот диагностирования fmin≤Δf≤fmax, где fmin - низшая информативная частота диагностирования, fmax - наибольшая из информативных частот диагностирования. Затем усиленный аналоговый сигнал поступает на первый АЦП 8, где преобразовывается в цифровой вид и передаются на контроллер 15, откуда через соответствующий интерфейсный блок (не показан) поступает в программируемый вычислитель 2, где формируется в виде файла данных с привязкой к реальному масштабу времени.
Одновременно с этим в измерительный тракт контроля частоты вращения с датчика частоты вращения 9 аналоговый электрический сигнал поступает на второй усилитель 10, где усиливается до заданного уровня и передается на второй АЦП 11, посредством которого преобразуется в цифровой вид, передается на котроллер 15 и через него на программируемый вычислитель 2, где фиксируется в виде файла данных.
С помощью контроллера 15 осуществляется управление процессом съема и предварительной обработки диагностических данных.
После завершения формирования файла исходных данных с помощью тракта формирования электрического сигнала от программируемого вычислителя 2 исходный виброакустический сигнал, зафиксированный в цифровом виде на программируемом вычислителе 2, поступает на ЦАП 12 и посредством управления от программируемого вычислителя 2 преобразуется в электрический аналоговый электрический сигнал, который усиливается третьим регулируемым усилителем 14, фильтруется регулируемым полосовым фильтром 7, перестроенным посредством контроллера 15 и программируемого усилителя 2 на требуемую полосу пропускания, позволяющую выделить необходимую информативную составляющую спектра. Отфильтрованный фильтром 7 сигнал поступает на первый АЦП 8, где преобразуется в цифровой вид, передается на контроллер 15 и через него - на программируемый вычислитель 2, где фиксируется в виде файла данных с временной реализацией рассматриваемого процесса в заданной полосе пропускания.
При необходимости исходный виброакустический сигнал многократно воспроизводится программируемым вычислителем 2 и ЦАП 12, усиливается третьим регулируемым усилителем 14 и фильтруется регулируемым полосовым фильтром 7, что обеспечивает его "сканирование" по частоте фильтрами с различной шириной полосы пропускания без каких-либо ограничений по времени и на абсолютно идентичных режимах функционирования диагностируемого объекта, что существенно расширяет возможности анализа.
При сложности выделения "слабых" по амплитуде, но информативных с позиций диагностирования частот сигналов используется программно-управляемый избирательный фильтр на основе резонансных цепей 13, который позволяет за счет управления от программируемого вычислителя 2 через контроллер 15 настроить резонансный контур на требуемую конкретную частоту f0, выделить ее из общего спектра, усилить третьим регулируемым усилителем 14, преобразовать в цифровой вид первым АЦП 8 и через контроллер 15 передать на программируемый вычислитель 2 с формированием на нем файла данных с временной реализации колебаний на анализируемой частоте. Это также расширяет возможности анализа диагностируемого сигнала.
В целом анализ диагностических данных осуществляется с учетом реального масштаба времени и частот вращения зубчатых колес диагностируемой передачи.
При выявлении в процессе анализа диагностических данных необходимости изменения алгоритма обработки исходного сигнала использование предлагаемого устройства позволяет это сделать без повторного съема контролируемых параметров.
После комплексной обработки диагностической информации в программируемом вычислителе 2 она представляется в удобном для потребителя виде на индикаторе 4 и фиксируется в регистрирующем устройстве 3.
Таким образом, использование в предлагаемом устройстве дополнительного тракта формирования электрического сигнала с программно-управляемым избирательным фильтром на основе резонансных цепей позволяет существенно расширить возможности анализа временных реализаций процессов колебаний, зафиксированных при одновременном съеме диагностической информации, и на этой основе существенно повысить эффективность диагностирования передач зацеплением.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ЦИКЛИЧЕСКИ ФУНКЦИОНИРУЮЩИХ ОБЪЕКТОВ | 2005 |
|
RU2289802C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАСХОДА КОМПОНЕНТОВ ПРОДУКЦИИ СКВАЖИН | 1998 |
|
RU2154162C2 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ НА ОСНОВЕ УГЛЕПЛАСТИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599327C1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2012 |
|
RU2531562C2 |
| ПОРТАТИВНАЯ КОРОТКОВОЛНОВАЯ - УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2823629C1 |
| СПОСОБ МУЛЬТИФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ ПОДШИПНИКОВЫХ УЗЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ В ИНТЕГРАЛЬНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2728485C1 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2256937C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И ОБРАБОТКИ РАДИОСИГНАЛОВ В КОРОТКОВОЛНОВОМ ДИАПАЗОНЕ | 2023 |
|
RU2808097C1 |
| Ультразвуковой адаптивный дефектоскоп | 1989 |
|
SU1702294A1 |
Изобретение относится к деталям машин и может быть использовано для виброакустической диагностики передач зацеплением приводов машин, применяемых в машиностроительной, металлообрабатывающей, станкостроительной, авиационной промышленности и других. Устройство для вибродиагностики передач зацеплением включает по меньшей мере один канал выделения измерительной информации, содержащий тракт контроля виброакустического сигнала и тракт контроля частоты вращения, программируемый вычислитель, индикатор и регистрирующее устройство, соответствующие входы которых связаны с выходами программируемого вычислителя. В канал выделения измерительной информации дополнительно введен тракт формирования электрического сигнала, включающий цифроаналоговый преобразователь, связанный с программируемым вычислителем, программно-управляемый резонансный контур, связанный с цифроаналоговым преобразователем и контроллером, и регулируемый усилитель, связанный с цифроаналоговым преобразователем и трактом контроля виброакустического сигнала. Технический результат - расширение возможности анализа временных реализаций процессов колебаний, зафиксированных при одновременном съеме диагностической информации, повышение эффективности диагностирования передач зацеплением. 3 ил.
Устройство для виброакустической диагностики передач зацеплением, включающее по меньшей мере один канал выделения измерительной информации, содержащий измерительный тракт контроля виброакустического сигнала, состоящий из последовательно соединенных первичного преобразователя виброакустического сигнала, первого регулируемого усилителя, регулируемого полосового фильтра и первого аналого-цифрового преобразователя, измерительный тракт контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения, второго регулируемого усилителя и второго аналого-цифрового преобразователя, и контроллер; программируемый вычислитель, индикатор и регистрирующее устройство, входы которых связаны с соответствующими выходами программируемого вычислителя, отличающееся тем, что в каждый канал выделения измерительной информации введен дополнительный тракт формирования электрического сигнала, включающий цифроаналоговый преобразователь, программно-управляемый избирательный фильтр на основе резонансных цепей и третий регулируемый усилитель, при этом цифроаналоговый преобразователь связан входом и первым выходом с соответствующими выходом и входом программируемого вычислителя, вторым выходом цифроаналоговый преобразователь связан с первым входом программно-управляемого избирательного фильтра на основе резонансных цепей, третьим выходом цифроаналоговый преобразователь связан с первым входом третьего регулируемого усилителя, второй вход последнего связан с выходом программно-управляемого избирательного фильтра на основе резонансных цепей, третий вход третьего регулируемого усилителя связан с соответствующим выходом контроллера, первый выход третьего регулируемого усилителя связан с соответствующим входом первого аналого-цифрового преобразователя, второй выход третьего регулируемого усилителя связан с соответствующим входом регулируемого полосового фильтра, второй вход программно-управляемого избирательного фильтра на основе резонансных цепей связан с соответствующим выходом контроллера.
| Питательный насос | 1929 |
|
SU20964A1 |
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ МАШИН | 1997 |
|
RU2125248C1 |
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ МАШИН | 1997 |
|
RU2125716C1 |
| СПОСОБ ВЫЯВЛЕНИЯ СТРУКТУРНЫХ ПОВРЕЖДЕНИЙ В МНОГОПОТОЧНЫХ ЗУБЧАТЫХ ПРИВОДНЫХ МЕХАНИЗМАХ | 1993 |
|
RU2065145C1 |
| US 5544080 А, 06.08.1996 | |||
| БОНОВОЕ ОГРАЖДЕНИЕ | 2004 |
|
RU2277151C1 |
| Экономайзер | 0 |
|
SU94A1 |
| 0 |
|
SU246637A1 | |

