Изобретение относится к измерительной технике, преимущественно к области диагностики объектов, имеющих повторяющиеся циклы функционирования, например вращения, в том числе передач зацеплением, работающих с динамическими изменяющимися моментами нагружения и частотами вращения, а также робототехнических средств циклического действия.
Известно устройство для диагностики передач зацеплением (свидетельство на полезную модель RU 20964, кл. G 01 Н 17/00, опубл. 2001), включающее один или несколько каналов выделения измерительной информации, содержащий тракт контроля виброакустического сигнала, состоящий из последовательно соединенных первичного преобразователя виброакустического сигнала, первого регулируемого усилителя, регулируемого полосового фильтра и первого аналого-цифрового преобразователя, тракт контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения, второго регулируемого усилителя и второго аналого-цифрового преобразователя, и контроллер; программируемый вычислитель; индикатор и регистрирующее устройство, соответствующие входы которых связаны с соответствующими выходами программируемого вычислителя.
Устройство ориентировано на анализ виброакустических характеристик передач зацеплением в основном при стендовых испытаниях или в условиях эксплуатации на стационарных режимах работы диагностируемого объекта. При его использовании для диагностирования передач зацеплением, работающих с динамически изменяющимися моментами нагружения и частотами вращения, возможности расширенного анализа контролируемых параметров на основе их сканирования узкополосными фильтрами с различной полосой пропускания оказываются весьма ограниченными из-за достаточно большой длительности этого процесса при весьма быстрых изменениях режимов функционирования диагностируемого объекта, что снижает достоверность полученных результатов и эффективность диагностирования.
Известны также способ диагностирования объектов и устройство для его осуществления (Описание изобретения к патенту RU № 2239869, G 07 С 11/00, опубл. 2004). Сущность предлагаемого способа состоит в том, что выполняют контроль значений параметров технического состояния и формируют оптимальную последовательность проверок поиска отказа, причем выполняют последовательно многократный контроль значений сигналов параметров технического состояния и формируют математические прогнозные модели изменения сигналов контролируемых параметров, по полученным моделям оценивают значения сигналов контролируемых параметров на глубине прогноза, равной сигналу минимальной разности между сигналами соответственно ресурса и наработки элементов системы, и в случае превышения одним из них сигнала допустимого значения формируют сигналы, пропорциональные величине вероятности безотказной работы элементов системы на момент времени, равный глубине прогноза, а по полученным величинам сигналов вероятности безотказной работы формируют оптимальную последовательность поиска отказа объекта.
Для реализации описанного способа используют устройство для диагностирования объекта, состоящее из блока суммирования, блока преобразования и хранения значений контролируемых параметров состояния объекта, блока ключей, элемента ИЛИ, содержащее, кроме того, блок регистрации времен наработки функциональных блоков контролируемого объекта, блок задания времен ресурса функциональных блоков, генератор тактовых импульсов, блок задания периода следования тактовых импульсов, двух элементов задержки времени, элемент выбора минимального значения разности ресурса и наработки, блок прогнозирования параметров состояния, блок вычисления времени прогноза, блок вычисления текущих времен наработки, блок определения выхода контролируемых параметров за допустимые значения и блок вычисления вероятностей безотказной работы функциональных блоков контролируемого объекта.
Основным недостатком этого устройства является отсутствие измерительной системы, то есть набора датчиков, характеризующих объект диагностирования.
Из известных наиболее близким по сущности к предлагаемому является устройство для виброакустической диагностики передач зацеплением (Описание изобретения к патенту RU № 2224223, кл. G 01 Н 17/00, опубл. 2004), включающее по меньшей мере один канал выделения измерительной информации, содержащий измерительный тракт контроля виброакустического сигнала, состоящий из последовательно соединенных первого преобразователя виброакустического сигнала, первого регулируемого усилителя, регулируемого полосового фильтра и первого аналого-цифрового преобразователя, тракт контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения, второго регулируемого усилителя и второго аналого-цифрового преобразователя, тракт формирования электрического сигнала, состоящий из цифроаналогового преобразователя, программно-управляемого избирательного фильтра на основе резонансных цепей и третьего регулируемого усилителя, и контроллер; программный вычислитель; индикатор и регистрирующее устройство, соответствующие входы которых связаны с соответствующими выходами программируемого вычислителя.
Устройство ориентировано на анализ виброакустических характеристик передач зацеплением в основном при стендовых испытаниях, диагностирование передач зацеплением, работающих с динамическими изменяющимися моментами нагружения и частотами вращения, является узко специализированным, сложным по конструкции (имеет несколько однотипных блоков) и не глубоко анализирует полученную информацию.
Задачей изобретения является повышение оперативности и объективности результатов диагностирования циклически функционирующих объектов, расширение функций устройства и углубление анализа параметров диагностирования.
Решение поставленной задачи достигается тем, что в устройство для виброакустической диагностики циклически функционирующих объектов, включающее, по меньшей мере, один канал выделения измерительной информации, содержащий измерительный тракт контроля виброакустического сигнала, состоящий из последовательно соединенных датчика вибраций и первого регулируемого усилителя, измерительный тракт контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения и второго регулируемого усилителя, тракт формирования электрического сигнала, состоящий из цифроаналогового преобразователя, программно-управляемого избирательного фильтра на основе резонансных цепей, третьего регулируемого усилителя и контроллера; программный вычислитель; индикатор и регистрирующее устройство, входы которых связаны с соответствующими выходами программируемого вычислителя, согласно техническому решению в каждый канал выделения измерительной информации введен дополнительный тракт контроля звукового шума объекта, включающий датчик шума и четвертый регулируемый усилитель, при этом первый вход четвертого регулируемого усилителя связан с первым выходом датчика шума, а второй его вход связан с контроллером, первый выход четвертого регулируемого усилителя связан с третьим входом коммутатора, первый вход которого связан с первым выходом первого регулируемого усилителя канала датчика вибрации, второй вход коммутатора соединен с первым выходом второго регулируемого усилителя канала датчика частоты вращения, четвертый вход последнего соединен с контроллером, первый выход коммутатора соединен с первым входом регулируемого цифрового фильтра, второй вход которого соединен с первым выходом третьего регулируемого усилителя, а его третий вход соединен с шестым выходом контроллера, первый выход регулируемого цифрового фильтра соединен со вторым входом контроллера. Коммутатор и регулируемый цифровой фильтр являются общими устройствами для трактов трех датчиков, канала выделения измерительной информации. Согласно техническому решению введено также прогнозирующее устройство, первый вход которого соединен с первым выходом первого регулируемого усилителя, второй его вход соединен с первым выходом второго регулируемого усилителя, третий вход соединен с первым выходом четвертого регулируемого усилителя, четвертый, пятый и шестой входы соединены соответственно с девятым, десятым и одиннадцатым выходами контроллера, а первый выход прогнозирующего устройства соединен с третьим входом контроллера.
Повышение эффективности диагностирования циклически функционирующих объектов достигается за счет введения в канал выделения измерительной информации тракта измерения шума объекта, который позволяет получить предварительную укрупненную информацию о техническом состоянии всех блоков диагностируемой части объекта, например робототехнического комплекса, по величине фонового (звукового) шума всех работающих блоков.
Введение в канал выделения измерительной информации бесконтактного коммутатора позволяет упростить предлагаемое устройство и вывести из состава каждого канала, по меньшей мере, по два аналого-цифровых преобразователя и одному регулируемому полосовому фильтру.
Замена регулируемого полосового фильтра и аналого-цифрового преобразователя (АЦП) одним регулируемым цифровым фильтром позволят увеличить точность обработки информации и быстродействие предлагаемого устройства диагностирования. А введение прогнозирующего устройства позволяет сформировать сигналы, пропорциональные вероятности безотказной работы каждого блока диагностируемого объекта, и построить оптимальный граф диагностирования блоков объекта.
Сущность предлагаемого устройства в виде функциональной схемы показана на фиг.1, на фиг.2 представлена функциональная схема регулируемого цифрового фильтра, на фиг.3 - функциональная схема прогнозирующего устройства.
Устройство виброакустической диагностики циклически функционирующих объектов содержит:
1 - канал выделения измерительной информации о виброакустических параметрах, звуковом шуме и частоте вращения;
2 - программируемый вычислитель;
3 - регистрирующее устройство;
4 - индикатор;
5 - прогнозирующее устройство;
6 - датчик вибраций;
7 - первый регулируемый усилитель;
8 - датчик частоты вращения;
9 - второй регулируемый усилитель;
10 - датчик шума;
11 - четвертый регулируемый усилитель;
12 - коммутатор;
13 - регулируемый цифровой фильтр;
14 - цифроаналоговый преобразователь;
15 - программно-управляемый избирательный фильтр;
16 - третий регулируемый усилитель;
17 - контроллер;
18 - формирователь квадратур;
19 - аналого-цифровой преобразователь;
20 - арифметическое устройство;
21 - оперативное запоминающее устройство;
22 - постоянное запоминающее устройство;
23 - блок регистрации времен наработки;
24 - блок задания времен ресурса;
25 - генератор тактовых импульсов;
26 - блок задания периода следования тактовых импульсов;
27 - блок суммирования;
28 - первый элемент задержки времени;
29 - блок преобразования и хранения параметров состояния объектов;
30 - элемент выбора минимума разницы;
31 - блок прогнозирования параметров состояния объекта;
32 - блок вычисления времени прогноза;
33 - второй элемент задержки времени;
34 - блок вычисления текущих времен наработки;
35 - юлок контроля параметров состояния объектов;
36 - блок ключей;
37 - элемент ИЛИ;
38 - блок вычисления вероятностей.
Устройство (фиг.1) состоит из канала выделения измерительной информации 1, программируемого вычислителя 2, регистрирующего устройства 3, вход которого связан с первым выходом программируемого вычислителя 2, индикатора 4, вход которого связан со вторым выходом программируемого вычислителя 2 и прогнозирующего устройства 5, первый вход которого соединен с первым выходом первого регулируемого усилителя 7, второй его вход соединен с первым выходом второго регулируемого усилителя 9, третий вход соединен с первым выходом четвертого регулируемого усилителя 11, четвертый, пятый и шестой его входы соединены соответственно с девятым, десятым и одиннадцатым выходами контроллера 17, а первый выход прогнозирующего устройства 5 соединены с третьим входом контроллера 17.
Канал выделения измерительной информации 1 включает:
- измерительный тракт контроля виброакустического сигнала, состоящий из последовательно соединенных датчика вибраций 6 и первого регулируемого усилителя 7, первый вход которого связан с выходом датчика вибраций 6, а первый выход - с первым входом бесконтактного коммутатора 12;
- измерительный тракт для контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения 8 и второго регулируемого усилителя 9, первый вход которого связан с выходом датчика частоты вращения 8, а первый выход связан со вторым входом коммутатора 12;
- измерительный тракт для контроля шума функционально законченной и пространственно расположенной в одном месте части блоков контролируемого объекта, состоящий из последовательно соединенных датчика шума (измерительный микрофон) 10 и четвертого регулируемого усилителя 11, первый вход которого связан с выходом датчика шума 10, а первый выход связан с третьим входом коммутатора 12;
- тракт формирования электрического сигнала, включающий бесконтактный коммутатор 12, первые три входа которого связаны с соответствующими выходами регулируемых усилителей измерительных трактов, регулируемый цифровой фильтр 13, первый вход которого связан с выходом коммутатора 12, цифроаналоговый преобразователь (ЦАП) 14, вход которого и первый выход связаны с соответствующими третьим выходом и первым вход программируемого вычислителя 2, программно-управляемый избирательный фильтр на основе резонансных цепей 15, первый вход которого связан со вторым выходом ЦАП 14, третий регулируемый усилитель 16, первый вход которого связан с третьим выходом ЦАП 14, второй вход третьего регулируемого усилителя 16 связан с выходом программно-управляемого избирательного фильтра на основе резонансных цепей 15, первый выход третьего регулируемого усилителя 16 связан со вторым входом регулируемого цифрового фильтра 13;
- контроллер 17, первый вход и первый выход которого связаны с соответствующими четвертым выходом и вторым входом программируемого вычислителя 2, второй вход контроллера 17 связан с первым выходом регулируемого цифрового фильтра 13, третий его вход связан с первым выходом прогнозирующего устройства 5, второй выход контроллера 17 связан со вторым входом первого регулируемого усилителя 7, третий выход контроллера 17 связан со вторым входом второго регулируемого усилителя 9, четвертый выход контроллера 17 связан с третьим входом третьего регулируемого усилителя 16, пятый выход контроллера 17 связан со вторым входом четвертого регулируемого усилителя 11, шестой вход контроллера 17 связан с третьим входом регулируемого цифрового фильтра 13, седьмой выход контроллера 17 связан со вторым входом программно-управляемого избирательного фильтра на основе резонансных цепей 15, восьмой выход контроллера 17 связан с четвертым входом коммутатора 12, девятый, десятый и одиннадцатый выходы контроллера 17 связаны соответственно с четвертым, пятым и шестым входами прогнозирующего устройства 5.
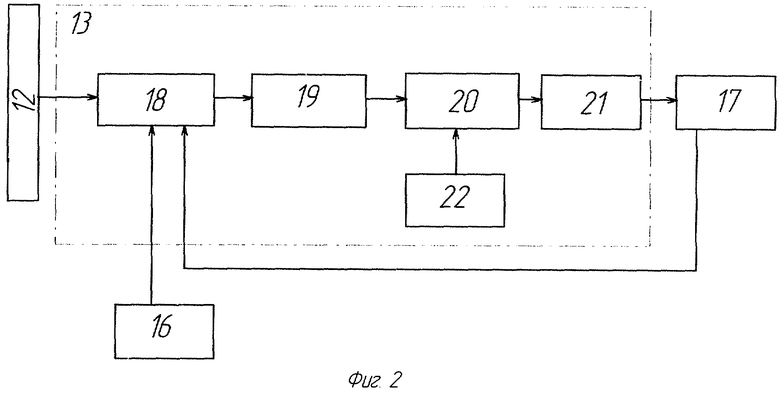
Регулируемый цифровой фильтр 13 (фиг.2) состоит из формирователя квадратур 18, первый вход которого соединен с первым выходом коммутатора 12, второй его вход соединен с первым выходом третьего регулируемого усилителя 16, а третий вход соединен с шестым выходом контроллера 17; аналого-цифрового преобразователя (АЦП) 19 первый вход которого соединен с первым выходом формирователя квадратур 18; арифметического устройства (АУ) 20, первый вход которого соединен с первым выходом АЦП 19, а второй его вход соединен с первым выходом постоянного запоминающего устройства (ПЗУ) 22; оперативного запоминающего устройства (ОЗУ) 21, первый вход которого соединен с первым выходом АУ 20, а первый его выход соединен со вторым входом контроллера 17.
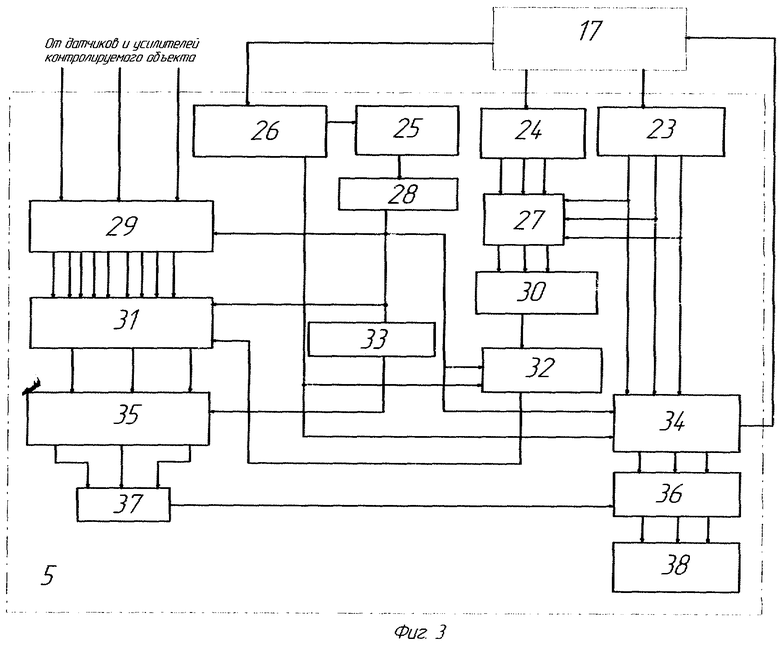
Прогнозирующее устройство 5 (фиг.3) содержит блок 23 регистрации времен наработки tiн (i=1, ..., k) функциональных блоков контролируемого объекта к моменту очередного включения устройства и контролируемого объекта, блок 24 задания времен ресурса tpi (i=1, ..., k) функциональных блоков, генератор тактовых импульсов 25 с периодом следования Т и скважностью ≪1, блок 26 задания периода следования тактовых импульсов Т, блок 27 суммирования, первый элемент задержки на время Т 28, блок 29 преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта, элемент 30 выбора минимального значения разности ресурса и наработки из k значений, блок 31 прогнозирования параметров состояния, блок 32 вычисления времени прогноза, второй элемент задержки 33 на время nT, блок 34 вычисления текущих времен наработки tiн (i=1, ..., k), блок 35 определения выхода m контролируемых параметров за допустимые значения через время прогноза tn, блок ключей 36, элемент ИЛИ 37 с m входами и блок 38 вычисления вероятностей безотказной работы n функциональных блоков контролируемого объекта.
Принцип действия и связи между выше перечисленными блоками описаны в патенте RU 2239869, кл. G 07 С 11/00, опуб. 2004.11.10. Отличия между известным и прелагаемым прогнозирующими устройствами состоит в том, что потенциометрические датчики с ручной установкой времен наработки tiн и времен ресурса tpi функциональных блоков контролируемого объекта известного устройства (блоки 1 и 2) заменены на операционные усилители, управляемые в автоматическом режиме контроллером 17 предлагаемого прогнозирующего устройства (блоки 23 и 24). Для этого введены дополнительные связи между ними (см. фиг.3). Информация о текущем времени наработки функциональных блоков контролируемого объекта ti снимается с выходов блока 34, обрабатывается и хранится также контроллером 17. Кроме того, контроллер 17 управляет работой всех блоков предлагаемого прогнозирующего устройства 5, изменяя настройку периода следования тактовых импульсов (блока 26).
Предлагаемое устройство (фиг.1) может быть снабжено одним, двумя и более каналами выделения измерительной информации, идентичными каналу 1.
Устройство работает следующим образом
При диагностировании циклически функционирующих объектов, работающих при динамически изменяющихся режимах, электрический аналоговый сигнал, снимаемый в течение минимально возможного интервала времени (времени 2-3 оборотов выходного вала) с датчика вибраций 6, который углубленно контролирует отдельный механизм объекта, поступает в первый регулируемый усилитель 7, где усиливается до заданного уровня (определение требуемого уровня усиления осуществляется с использованием программируемого вычислителя 2), через бесконтактный коммутатор 12, управляемый контроллером 17, отфильтровывается регулируемым (от контроллера 17) цифровым фильтром 13, настроенным на полосу пропускания, охватывающую весь возможный Δƒ1 диапазон наиболее информативных частот диагностирования ƒmin1≤Δƒ1≤ƒmax1, где
ƒmin1 - наименьшая из информативных частот диагностирования для вибраций;
ƒmax1 - наибольшая из информативных частот диагностирования для вибраций.
Затем сигнал передается на контроллер 17, откуда через соответствующий интерфейсный блок (не показан) поступает в программируемый вычислитель 2, где формируется в виде файла данных с привязкой к реальному масштабу времени.
В последующий момент времени (времени 2-3 оборотов выходного вала) в измерительный тракт контроля частоты вращения с датчика частоты вращения 8 аналоговый электрический сигнал поступает на второй регулируемый усилитель 9, где усиливается до заданного уровня и через коммутатор 12 и фильтр 13 преобразуется в цифровой вид, передается на контроллер 17 и через него на программируемый вычислитель 2, где формируется в виде файла данных.
В последующий момент времени (времени 2-3 оборота выходного вала) в измерительный тракт контроля шума объекта с датчика шума 10, который контролирует работу функционально законченной и пространственно расположенной в одном месте части блоков контролируемого объекта, аналоговый электрический сигнал поступает на четвертый регулируемый усилитель 11, где усиливается до заданного уровня (определение требуемого уровня усиления осуществляется с использованием программируемого вычислителя 2), передается через коммутатор 12, отфильтровывается регулируемым (от контроллера 17) цифровым фильтром 13, настроенным на полосу пропускания, охватывающую весь возможный Δƒ2 диапазон наиболее информативных частот диагностирования ƒmin2≤Δƒ2≤ƒmax2, где
ƒmin2 - наименьшая из информативных частот диагностирования для шума;
ƒmax2 - наибольшая из информативных частот диагностирования для шума объекта.
Затем передается на контроллер 17, откуда через соответствующий интерфейсный блок (не показан) поступает в программируемый вычислитель, где формируется в виде файла данных с привязкой к реальному масштабу времени.
С помощью контроллера 17 осуществляется управление процессом съема и преобразовательной обработки диагностических данных.
После завершения формирования файла исходных данных приступают к его обработке и в начале анализируют сигналы датчика шума объекта. Если сигнал шума диагностируемой части объекта не превышает допустимых норм, то приступают к углубленному диагностированию планируемого механизма объекта с помощью датчика вибраций, в противном случае выясняют причину шума, отыскивают шумящий механизм и углубленное диагностирование начинают с этого механизма.
Углубленное диагностирование выполняют в следующей очередности. С помощью тракта формирования электрического сигнала от программируемого вычислителя 2 исходный виброакустический сигнал, зафиксированный в цифровом виде на программируемом вычислителе 2, поступает на ЦАП 14 и посредством управления от программируемого вычислителя 2 преобразуется в электрический аналоговый сигнал, который усиливается третьим регулируемым усилителем 16, фильтруется цифровым фильтром 13, перестроенным посредством контроллера 17 и программируемого вычислителя 2 на требуемую полосу пропускания, позволяющую выделить необходимую информативную составляющую спектра. Отфильтрованный фильтром 13 преобразованный в цифровой вид сигнал передается в контроллер 17 и через него - на программируемый вычислитель 2, где фиксируется в виде файла данных с временной реализацией рассмотренного процесса в данной полосе пропускания.
При необходимости исходный виброакустический сигнал многократно воспроизводится программируемым вычислителем 2 и ЦАП 14, усиливается третьим усилителем 16 и фильтруется регулируемым цифровым фильтром 13, что обеспечивает его «сканирование» по частоте фильтрации с различной шириной полосы пропускания без каких-либо ограничений по времени и на абсолютно идентичных режимах функционирования диагностируемого объекта, что существенно расширяет возможности анализа.
При сложности выделения «слабых» по амплитуде, но информативных с позиции диагностирования частот сигналов используются программно-управляемый избирательный фильтр на основе резонансных цепей 15, который позволяет за счет управления от программируемого вычислителя 2 через контроллер 17 настроить резонансный контур на требуемую конкретную частоту ƒ0, выделить ее из общего спектра, усилить третьим усилителем 16, преобразовать в цифровой вид фильтром 13 и через контроллер 17 передать на программируемый вычислитель 2 с формированием на нем файла данных с временной реализацией колебаний на анализируемой частоте. Это также расширяет возможности анализа диагностируемого сигнала.
В целом анализ диагностических данных осуществляется с учетом реального масштаба времени и частот вращения механизмов диагностируемого объекта.
При выявлении в процессе анализа диагностических данных необходимости изменения алгоритма обработки исходного сигнала использование предлагаемого устройства позволяет это сделать без повторного съема контролируемых параметров.
После комплексной обработки диагностической информации в программируемом вычислителе 2 она представляется в удобном для потребителя виде на индикаторе 4 и фиксируется в регистрирующем устройстве 3.
Регулируемый цифровой фильтр 13 работает следующим образом.
Аналоговый входной сигнал при первичной его записи в программируемый вычислитель 2 подается с коммутатора 12 через первый вход формирователя квадратур (ФК) 18. При углубленном диагностировании текущего блока объекта аналоговый сигнал возвращается на ФК 18 с третьего регулируемого усилителя 16 через второй его вход. Работой ФК 18 управляет контроллер 17 путем изменения опорной частоты следования импульсов, которые подаются на вход три ФК 18.
По заданному закону с помощью АЦП 19 аналоговый сигнал преобразуется в цифровой и обрабатывается арифметическим устройством (АУ) 20. Результаты обработки временно хранятся в оперативном запоминающем устройстве (ОЗУ) 21 и анализируются с помощью контроллера 17. Программа работы арифметического устройства хранится в постоянном запоминающем устройстве ПЗУ 22.
Прогнозирующее устройство 5 работает следующим образом.
Пусть время ресурса i-го функционального блока объекта составляет tpi, (i=1, ..., k), а время наработки к моменту его очередного включения - tiн (t=1, ..., k). Перед включением устройства эти параметры выставляются с помощью контроллера 17 на блоке 23 задания времен наработки tiн (i=1, ..., k) функциональных блоков контролируемого объекта к моменту очередного включения устройства и на блоке 24 задания времен ресурса tpi (i=1, ..., k) функциональных блоков контролируемого объекта к моменту очередного включения устройства соответственно.
Включение в работу прогнозирующего устройства 5 осуществляется командой, подаваемой с контроллера 17 на блок задания периода следования тактовых импульсов (блок 26) предлагаемого прогнозирующего устройства.
Принцип действия и связи между блоками прогнозирующего устройства 5 описаны в патенте RU № 2239869, кл. G 07 С 11/00, опуб. 2004.11.10.
Обратная связь между прогнозирующим устройством 5 и каналом выделения измерительной информации 1 осуществляется путем передачи текущих времен наработки функциональных блоков контролируемого объекта ti, снимаемого с выходов блока 34 на третий вход контроллера 17, где они обрабатываются и хранятся.
Блок регистрации времен наработки tiн (i=1, ..., k) 23 функциональных блоков контролируемого объекта к моменту очередного включения устройства и блок задания времен ресурса tpi (i=1, ..., k) 24 функциональных блоков контролируемого объекта к моменту очередного включения устройства (фиг.3) содержат по k задатчиков времен наработки tiн (i=1, ..., k) и времен ресурса tpi (i=1, ..., k) соответственно. Эти задатчики реализуются с помощью операционных усилителей, управляемых от контроллера 17 (см. Справочник по радиоэлектронике в трех томах. Под общей ред. докт. техн. наук А.А.Куликовского, Том 3, «Энергия» 1970, стр.284-286).
Таким образом, использование в предлагаемом устройстве дополнительного тракта измерения шума позволяет рационально организовать работу по диагностированию блоков объекта и повысить ее эффективность. Введение в канал выделения измерительной информации бесконтактного коммутатора позволяет уменьшить количество однотипных блоков трактов канала и тем самым упростить их конструкцию. Замена регулируемого полосового фильтра и аналого-цифрового преобразователя на регулируемый цифровой фильтр позволяет повысить быстродействие и увеличить точность обработки информации. Применение прогнозирующего устройства существенно увеличивает глубину анализа диагностической информации. А все вместе эти признаки приводят к повышению оперативности и объективности диагностирования сложных технических систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ПЕРЕДАЧ ЗАЦЕПЛЕНИЕМ | 2002 |
|
RU2224223C1 |
| Устройство измерения и оценки технического состояния оборудования машиностроительного комплекса | 2018 |
|
RU2691225C1 |
| СПОСОБ ДИАГНОСТИКИ И РЕГУЛИРОВАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2075741C1 |
| СПОСОБ МУЛЬТИФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ ПОДШИПНИКОВЫХ УЗЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ В ИНТЕГРАЛЬНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2728485C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШУМА | 1999 |
|
RU2180732C2 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2011 |
|
RU2465676C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИЗНОСА И ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОЙ СТОЙКОСТИ РЕЖУЩЕГО ИНСТРУМЕНТА ДЛЯ СИСТЕМЫ ЧПУ СТАНКА | 2009 |
|
RU2417140C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2239869C2 |
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ МАШИН | 2001 |
|
RU2202105C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕЧЕЙ В АРМАТУРЕ, ТРУБОПРОВОДАХ, СОСУДАХ ДАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2132510C1 |
Изобретение относится к области диагностической техники объектов, имеющих повторяющиеся циклы функционирования. Техническим результатом изобретения является повышение оперативности и объективности результатов диагностирования, расширение функций устройства и углубление анализа параметров диагностирования. Устройство виброакустической диагностики циклически функционирующих объектов включает один или несколько каналов выделения измерительной информации, каждый из которых содержит тракт контроля виброакустического сигнала, тракт контроля частоты вращения, тракт формирования электрического сигнала; контроллер; программируемый вычислитель; индикатор и регистрирующее устройство. В каждый канал выделения измерительной информации устройства дополнительно введен тракт измерения шума функционально законченной и пространственно расположенной в одном месте части блоков контролируемого объекта, а тракт формирования электрического сигнала дополнен бесконтактным коммутатором и регулируемым цифровым фильтром. Предлагаемая система дополнена также прогнозирующим устройством. 3 ил.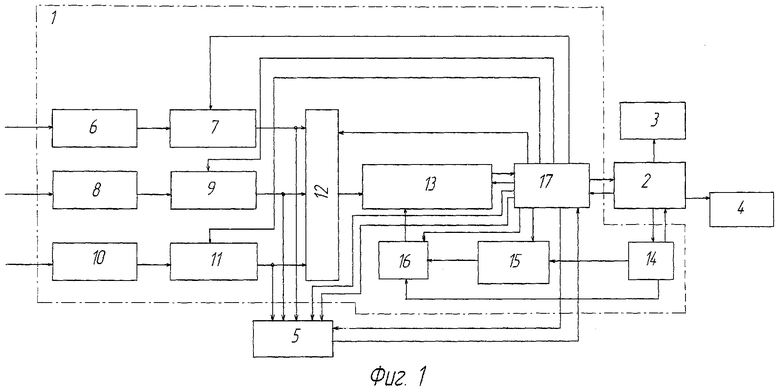
Устройство виброакустической диагностики циклически функционирующих объектов, включающее один или несколько каналов выделения измерительной информации, каждый из которых содержит измерительный тракт контроля виброакустического сигнала, состоящий из последовательно соединенных датчика вибраций и первого регулируемого усилителя, тракт контроля частоты вращения, состоящий из последовательно соединенных датчика частоты вращения и второго регулируемого усилителя, части тракта формирования электрического сигнала, включающего цифроаналоговый преобразователь, программно-управляемый избирательный фильтр на основе резонансных цепей, третий регулируемый усилитель и контроллер, программируемый вычислитель, индикатор и регистрирующее устройство, входы которых связаны с соответствующими выходами программируемого вычислителя, отличающийся тем, что содержит прогнозирующее устройство, входы блока преобразования и хранения значений каждого из контролируемых параметров состояния объекта которого соединены с соответствующими выходами трактов контролируемых параметров, входы блока регистрации времени наработки функциональных блоков контролируемого объекта к моменту включения устройства и контролируемого объекта соединены с соответствующими выходами контроллера, входы блока задания времен ресурса функциональных блоков контролируемого объекта соединены с соответствующими выходами контроллера, вход блока задания периода следования тактовых импульсов соединен с соответствующим выходом контроллера, а выходы блока вычисления текущих времен наработки функциональных блоков контролируемого объекта соединены с соответствующими входами контроллера, и в каждый канал выделения измерительной информации введен дополнительный тракт измерения шума функционально законченной и пространственно расположенной в одном месте части блоков контролируемого объекта, состоящий из последовательно соединенных датчика шума и четвертого регулируемого усилителя, а тракт формирования электрического сигнала дополнен бесконтактным коммутатором и регулируемым цифровым фильтром, при этом коммутатор своими входами связан с выходами тракта контроля виброакустического сигнала, тракта контроля частоты вращения, тракта измерения шума части блоков объекта и соответствующим выходом контроллера, выход коммутатора связан с первым входом регулируемого цифрового фильтра, второй вход фильтра связан с выходом третьего регулируемого усилителя, а третий его вход связан с соответствующим выходом контроллера, выход регулируемого цифрового фильтра связан со вторым входом контроллера.
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ПЕРЕДАЧ ЗАЦЕПЛЕНИЕМ | 2002 |
|
RU2224223C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| Устройство вибрационного контроля турбоагрегата | 1989 |
|
SU1652862A1 |
| SU 1647323 A2, 07.05.1991 | |||
| WO 03073050 A2, 04.09.2003 | |||
| JP 63173928 А, 18.07.1988. | |||

