Изобретение относится к машиностроению, в частности к приводам машин с гибкой связью, и может быть применено в передачах, работающих с переменным режимом нагружения, а также использоваться, например, в качестве звена автоматического плоскоременного вариатора.
Известен шкив самонатяжной передачи гибкой связью [1], в котором происходит автоматическая подтяжка гибкой связи с увеличением передаваемой полезной нагрузки за счет дополнительного растяжения изогнутых спиц.
Недостатком такого шкива является невысокая долговечность, т.к. плоские изогнутые пружины-спицы испытывают переменную изменяющуюся нагрузку в течение каждого оборота шкива на 2π, что приводит к их сжатию-растяжению в местах изгиба, ускоренной усталости металла в этих местах и, как следствие, к поломке пружин. Вторым недостатком является невозможность автоматического изменения передаточного отношения передачи гибкой связью с изменением внешней нагрузки на ведомом валу, что отрицательно влияет на режим работы источника движения, повышая энергозатраты и снижая кпд.
Наиболее близким техническим решением к заявляемому является шкив [2]. Шкив содержит плоскую многовитковую пружину, один конец которой жестко закреплен на ступице ведущего вала, а крайним периферийным витком образован обод, и фиксатор, установленный на свободном конце плоской многовитковой пружины, позволяющий сохранять как целостность конструкции, так и относительную подвижность витков. За счет изменения количества последних и обеспечивается автоматическое изменение кинематического диаметра шкива и передаточного отношения передачи гибкой связью.
Недостатком такого шкива является смещение центра его массы относительно оси ступицы, зависимое от переменного внешнего нагружения, что приводит к динамической неустойчивости работы передачи на скоростных режимах ее эксплуатации.
Задачей изобретения является повышение надежности работы шкива за счет обеспечения устойчивости работы передачи в условиях многорежимной эксплуатации.
Поставленная задача решена за счет того, что в шкиве, содержащем обод переменного диаметра, обод выполнен в виде однополостного гиперболоида вращения, образованного несущими стержнями, концы которых закреплены в шаровых опорах, равномерно расположенных на внутренней поверхности фланцев, причем один фланец жестко установлен на ведомом валу, а второй образует с валом двухподвижную связь, при этом оба фланца связаны пружиной растяжения.
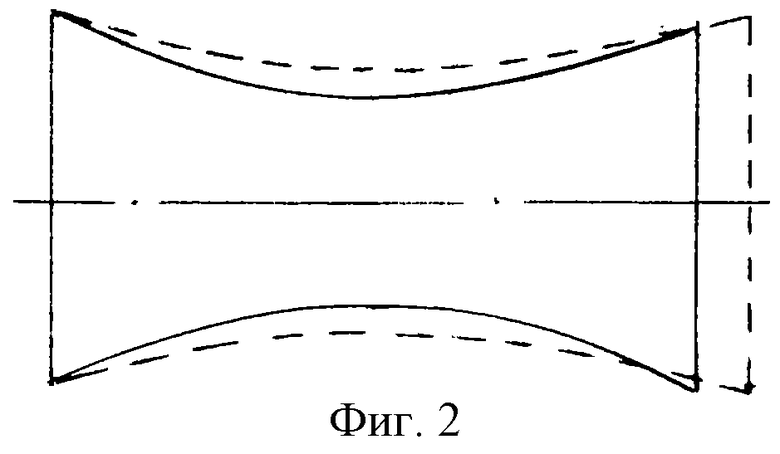
На фиг. 1 изображен предлагаемый шкив, общий вид; на фиг.2 - однополостной гиперболоид вращения в разрезе, сплошной линией показано начальное положение с минимальным горловым сечением, пунктиром - в рабочем положении с увеличенным горловым сечением; на фиг.3 - пространственное изображение однополостного гиперболоида вращения.
Шкив имеет фланец 1, установленный жестко на ведомом валу 2, и фланец 3, образующий с валом 2 двухподвижную связь 4. Двухподвижная связь 4 может быть образована путем размещения подшипника во фланце 3 и установки фланца 3 (подшипника) на валу 2 по скользящей посадке. Несущие стержни 5, образующие обод шкива в виде однополостного гиперболоида вращения, подвижны относительно фланцев 1 и 3, т.к. стержни 5 своими концами закреплены в шаровых опорах 6, равномерно расположенных на внутренних поверхностях фланцев. Между фланцами 1 и 3 расположена пружина 7 растяжения, крайние витки которой жестко связаны с фланцами. Штриховой линией на фиг.1 показаны S1 и S2 - тянущая и холостая ветви передачи с гибкой связью.
Для ограничения относительного углового смещения фланцев 1 и 3 в конструкцию двухподвижной связи 4 можно ввести упоры, установленные на двухподвижную связь (не показано).
Шкив работает следующим образом.
В исходном положении фланцы 1 и 3 находятся на минимальном расстоянии друг от друга, при этом однополостный гиперболоид вращения, образуемый несущими прямолинейными стержнями 5, имеет минимальный размер диаметра в горловом сечении.
При увеличении нагрузки на ведомом валу 2 фланец 3 поворачивается и смещается относительно ведомого вала 2, пружина 7 растягивается, при этом форма гиперболоида - кинематической поверхности (поверхности вращения) - изменяется, диаметральный размер в горловом сечении увеличивается, что приводит к автоматическому увеличению передаточного отношения передачи гибкой связью до требуемой величины, потребляемая мощность сохраняется, как и устойчивость работы передачи. В предельном максимальном расчетном нагружении кинематическая поверхность шкива вырождается в круговой цилиндр с диаметром, равным диаметру размещения несущих стержней 5 на фланцах 1 и 3. В таком положении дальнейшее угловое смещение фланцев 1 и 3 могут ограничивать упоры, установленные на двухподвижную связь 4.
Предлагаемое техническое решение позволит повысить надежность работы шкива в условиях многорежимной эксплуатации передачи за счет возможности непрерывного плавного изменения диаметра шкива в процессе работы передачи без ее остановки.
Источники информации
1. А.с. 1618944 СССР, кл. F 16 Н 7/08, 55/40. Шкив самонатяжной передачи гибкой связью. - 1991.
2. Патент 2127841, кл. 6 F 16 Н 9/400. Шкив. Бюлл. 8. 1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШКИВ | 1996 |
|
RU2127841C1 |
| Многокомпонентный датчик усилий и моментов | 1982 |
|
SU1045020A1 |
| ВАРИАТОР | 1991 |
|
RU2039900C1 |
| Вибромашина для обработки поверхности длинномерных изделий | 1980 |
|
SU944887A1 |
| Бесступенчатый вариатор | 2019 |
|
RU2711843C1 |
| СТАНОК ДЛЯ РУЧНОЙ ОГРАНКИ ДРАГОЦЕННЫХ КАМНЕЙ | 2000 |
|
RU2187420C1 |
| ПЕРЕМЕННАЯ ПЕРЕДАЧА | 1994 |
|
RU2102275C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ОЗЕЛЕНЕНИЯ СТЕН ЗДАНИЙ | 2017 |
|
RU2634286C1 |
| УПРУГОКОМПЕНСАЦИОННАЯ МУФТА | 1992 |
|
RU2065536C1 |
| СПОСОБ ТОКАРНОЙ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2005 |
|
RU2296035C2 |

Изобретение относится к машиностроению, в частности к приводам машин с гибкой связью, и может быть применено в передачах, работающих с переменным режимом нагружения, и использован в качестве звена автоматического плоскоременного вариатора. Шкив представляет собой однополостный гиперболоид вращения, образуемый несущими стержнями 5, концы которых закреплены в шаровых опорах 6, равномерно расположенных на внутренней поверхности фланцев 1 и 3. Фланец 1 установлен на ведомом валу 2 жестко. Фланец 3 образует с валом 2 двухподвижную связь 4. Оба фланца связаны пружиной растяжения 7. Технический результат заключается в повышении надежности работы шкива за счет обеспечения устойчивости работы передачи в условиях многорежимной эксплуатации. 3 ил.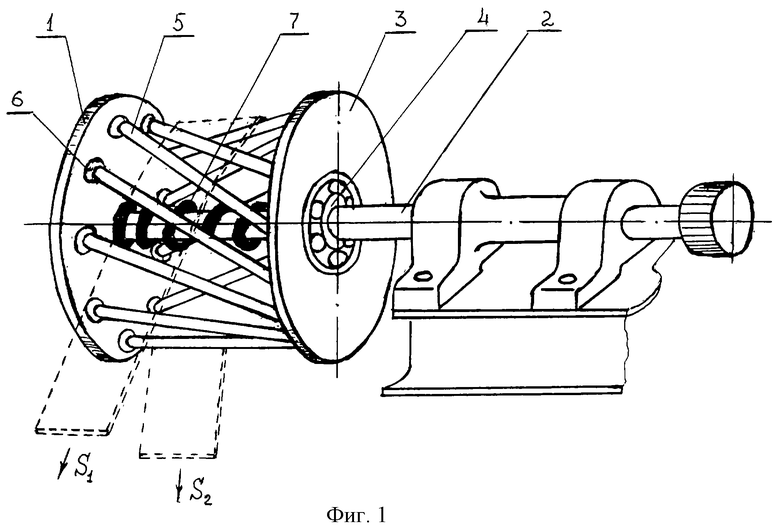
Шкив, содержащий обод переменного диаметра, отличающийся тем, что обод выполнен в виде однополостного гиперболоида вращения, образованного несущими стержнями, концы которых закреплены в шаровых опорах, равномерно расположенных на внутренней поверхности фланцев, причем один фланец жестко установлен на ведомом валу, а второй образует с валом двухподвижную связь, при этом оба фланца связаны между собой пружиной растяжения.
| Сборное гибкое колесо | 1976 |
|
SU754146A1 |
| Фрикционный вариатор | 1985 |
|
SU1370347A1 |
| Вопросы ракетной техники, № 8, 1965, с.102-104, фиг.46д. | |||

