. Изобретение относится к машиностр ению и может быть использовано для очувствления промышленных роботов и в качестве управляющей рукоятки манипулятора . Известны многокомпонентные датчик УСИЛИЙ и моментов, содержащие опорны и силопередающий фланцы, связывающую их упругую подвеску и измерительные преобразователи перемещений или деформаций i К недостаткам указанных устройств относятся низкая точность определени компонент усилий и моментов, обуслоб Ленная взаимным влиянием различных видов напряжений в элементах упругой подвески,и нетехнологичность входящих в него деталей. Наиболее близким к предлагаемому n технической сущносту и достигаемому результату является многокомпонентны датчик усилий и моментов, например, для очувствления промышленных робото содержащий опорный и силоперадающий фланцы, измерительные преобразовател силы, установленные на шести стержня соединяющих посредством сферических шарниров три расположенные не на одной прямой точки одного фланца с тремя точками другого фланца, также расположенными не на одной прямой 2 Недостаток заключается в невысокой точности определенияхкомпонент усилий и моментов вследствие того, что для устранения зазоров в сферических шарнирах многокомпонентный датчик приходится нагружать изBecTHbDVj постоянным усилием, превышающим измеряемые. При этом сила трения в.сферических шарнирах обусловливает наличие изгибных напражен в стержнях, искажающих информацию о напряжениях сжатия в стержнях, по которым и определяют компоненты уси лий и моментов. Цель изобретения - повышение точ ности измерения за счет исключения взаимовлияния напряжений в элемента упругой подвески. Поставленная цель достигается тем что в многокомпонентный датчик усилий и моментов для очувствления npoмышленных роботов и манипуляторов и управления ими, содержащий опорный и силопередающий фланцы, связывающую ИХ упруг то подвеску и измерительные преобразователи перемещений фланцев или деформаций упругой подвески, дополнительно введен второй опорный фланец, жестко связанный с первьом опорным фланцем, причем плоскости опорных фланцев параллельны друг другу, упругая подвеска выполнена из четного числа упругих элементов растяжения - сжатия, средние части кото рых жестко связаны с силопередаюо им Фланцем, а концы жестко связаны с опорными фланцами, упругие элементы расположены вдоль образующих однополостного гиперболоида вращения, причем плоскость силопередающего фланца совпадает с плоскостью горлового сечения одноплостного гиперболоида вращения. Упругая подвеска состоит из восьми струн, попарно пересекающихся в горловом сечении гиперболоида под углом. 90° . Измерительные преобразователи перемещений или деформаций связаны со струнами. На чертеже изображена схема предла гаемого многокомпонентного датчика. Многокомпонентный датчик усилий и моментов содержит опорные 1 и 2 и силопередающий 3 фланцы,связывающую их упругую подвеску, в которЪй в качестве упругих элементов растяжения сжатия использованы струны ЛЬ, Вс, Cd, De, Ef, Fg, Gh, Ha, An, Ba, Cb,Dc, Ed, Fe, Gf, Hg, и шесть измерительных преобразователей 4-9 деформаций струн. Указанные струны протянуты вдоль образующих однополостного гипер-болоида вращения и концами укреплены в точках А, В, С, D, Е, F,--G, Н и а, Ь, с, d, е, f, g, h. Эти точки принадлежат соответственно двум окружностям на опорных фланцах 1 и 2 и делят их на равные части, Струны АЬ и Ва, Вс, и СЬ,Cd и DC и т.д. попарно пересекаются в горловом сечении гиперболоида и крепятся в точках пересения , т, п, о, р, ч, S, t к силопередающему фланцу, Многокомпонентный датчик работает следующим образом. При приложении нагрузки к силопередающему фланцу 3 она через упругую подвеску передается опорным фланцам 1 и 2, при этом в струнах упругой подвески возникают натяжения - осевые силы, уравновешивающие нагрузки. Эти силы обуславливают деформации струн, которые и фиксируются измерительными преобразователями 4-9 деформаций . Малый диаметрструн обеспечивает отсутствие изгибных, крутильных и сдвиговых напряжений в них. Струны передают нагрузки только в направлениях, соединяющих точки крепления их к опорньом фланцам 1 и 2.Поскольку взаимное расположение струн известно и жестокостные характеристики струн известны (точка приложения равнодействующей внешних сил также обычно известна), то в соответствии с формулами теоретической механики составляются зависимости между деформациями струн и компонентами усилий и моментов, которые используются дли расчетов на ЭВМ. Наиболее ,простыми эти зависимости будут при числе струн равном восьми и при эка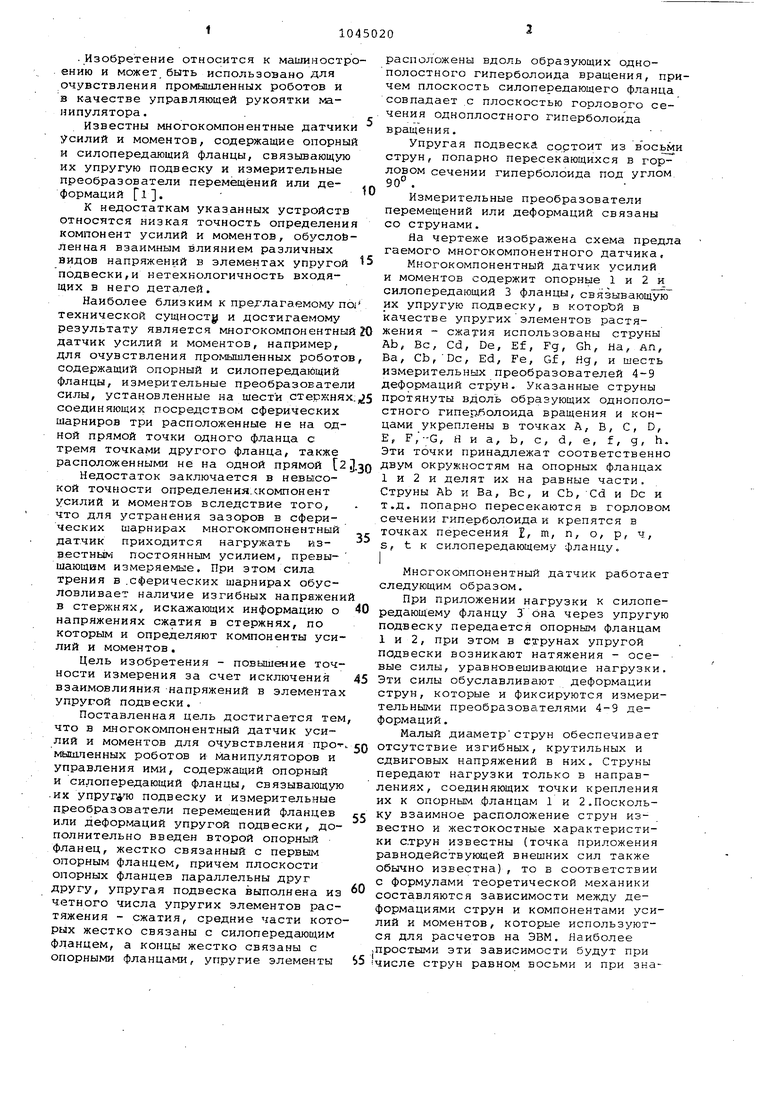
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДЛЯ СИЛОМОМЕНТНОГО ОЧУВСТВЛЕНИЯ РОБОТОВ | 2006 |
|
RU2306536C1 |
| Динамометрический датчик | 1986 |
|
SU1352262A1 |
| Шестикомпонентный датчик нагрузки манипулятора | 1983 |
|
SU1062537A1 |
| Устройство платформенного типа для многокомпонентного измерения сил и моментов | 1990 |
|
SU1783329A1 |
| Устройство для силового очувствления преимущественно манипулятора | 1988 |
|
SU1516351A1 |
| Многокомпонентный @ -координатный датчик (его варианты) | 1984 |
|
SU1185128A1 |
| Весовое устройство | 1989 |
|
SU1770767A1 |
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| Устройство очувствления | 1986 |
|
SU1421535A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛОВЫХ ФАКТОРОВ, ДЕЙСТВУЮЩИХ НА КОЛЕСО | 2003 |
|
RU2276777C2 |
1. МНОГОКОМПОНЕНТНЫЙ ДАТЧИК УСИЛИЙ И МОМЕНТОВ для очувствления прокышленных р оботов и манипуляторов и управления , содержащий опорный и силопередающий , связывающую их упругую подвеску и измерительные преобразователи перемещении фланцев или деформаций упругой подвески, отличающийся тем, что, с целью повышения точности измерения за счет исключения взаимовлияния напряжений в упругой подвеске, в него дополнительно введен второй опорный фланец, жестко связанный с первым опорным фланцем, причем плоскости опорных фланцев параллельны друг друГУ упругая подвеска выполнена из четного числа упругих элементов растяжения - сжатия, средние части которых жестко ев язаны с- (ередс1ющим фланцем, а ксжцы жестко связаны с опорными фланцами, упругие расположены вдоль образующих однополостного гиперболиода вращения, причем плоскость силопередёиощего фланца . $ совпадает с плоскостью горлового сечения гиперболиода вргицения. 2. Датчик по п. 1, отличающийся тем, что упругая прдвеска состоит из восьми струн, попарно пересекающихся в горловом сечении гиперболиода под углом 90 , 3. датчик по п. 1 и 2, о т л и-. t««i чающийся тем, что измерительные преобразователи перемещений или деформаций связаны со струнами. сд
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| FJatau | |||
| Force in Robots and Manipulatons | |||
| Theory and praktice of robots and manipujatops | |||
| Sec | |||
| Int CISM - IFTOMM SYMPOSIUM, Warsaw, Pojand, Sept | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Держатель для поленьев при винтовом колуне | 1920 |
|
SU305A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по- заявке 3306895/10, 13.05.81, (прототип). | |||
