Изобретение относится к радиолокации и служит целям определения угловых координат постановщиков активных помех (ПАП).
Известны различные типы одноканальных амплитудных пеленгаторов [1]. Они содержат приемное устройство, устройство управления пороговым уровнем и пороговое устройство. В основу способа пеленга постановщиков помех положено применение устройства управления порогом, содержащее накопитель и интегратор, с помощью которых образуется пороговое напряжение, не допускающее приема сигналов по боковым лепесткам диаграммы направленности (ДН) антенны. Пороговый уровень формируется по пиковому напряжению огибающей принятых сигналов. Для этого в цепи управления стоит накопитель. Сравнение с пороговым уровнем производится для сигналов, принятых через обзор. Таким образом, существенное увеличение или уменьшение амплитуды сигналов, принятых в следующем обзоре, неизбежно приводит к появлению ложных сигналов (от боковых лепестков) на выходе устройства или (соответственно) к пропуску сигналов. К этому же приводит значительное изменение длительности соседних обзоров.
Известны и другие варианты построения одноканального амплитудного пеленгатора [2], где пороговый уровень формируется по-иному.
Пороговый уровень в [2] формируется усреднением принятого в некотором угловом интервале напряжения помех. С пороговым уровнем сравнивается напряжение, принятое в том же угловом интервале, что достигается включением устройства задержки на время, соответствующее интервалу усреднения. Последнее полностью исключает зависимость выходного эффекта от уровней сигналов в соседних обзорах и длительности обзоров.
Прототипом предложенного устройства является одноканальный амплитудный пеленгатор, описанный в [2].
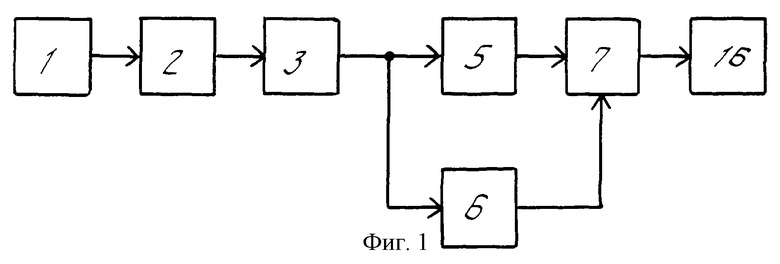
Пеленгатор содержит последовательно подключенные антенную систему, приемное устройство и детектор-интегратор, к выходу которого параллельно подключены блок памяти и устройство усреднения-усиления, выходы которых подключены ко входам устройства сравнения. Выход устройства сравнения подключен ко входу счетно-решающего устройства.
Для простоты пояснения работы устройства прототипа допустим, что в зоне обзора пеленгатора находится один ПАП. При сканировании антенной системы на выходе блока усреднения формируется напряжение U< >, представляющее собой усредненный в некотором угловом интервале Δ (много большем ширины ДН) уровень напряжения, принятого приемным каналом. Полученное напряжение, увеличенное на величину β, определяющую уровень ложных тревог пеленгатора, является напряжением плавающего порога Uп=βU< >. При этом используется то обстоятельство, что огибающая ДН практически везде вне главного лепестка представляет собой стационарный релеевский процесс, а главный лепесток в достаточно широком секторе углов образует резкую нестационарность. На устройстве сравнения производится сравнение уровней напряжения, принятых на каждом (с некоторым дискретом δ) угловом направлении из заданного углового интервала Δ(δ<<Δ) и задержанных в блоке памяти на половину интервала усреднения с уровнем плавающего порога. При этом на выходе устройства сравнения формируется признак пеленга: логическая 1 либо 0.
Недостатком описанного пеленга является то, что при работе пеленгатора по постановщику мощной нестационарной помехи уровень ложных пеленгов, т.е. пеленгов, формируемых боковыми лепестками ДН антенны, может повышаться. Пусть, например, мощность помехи модулируется импульсной последовательностью. В результате принимаемая мощность в приемном канале (огибающая ДН антенны) также будет промодулирована этой последовательностью. Поэтому при заданном интервале усреднения вклад напряжения, соответствующего огибающей ДН, в формирование порогового уровня (в формирование среднего напряжения U< > на выходе устройства усреднения) уменьшится. Пороговый уровень пеленгатора Uп = βU< > есть напряжение на выходе устройства усреднения U< >, увеличенное в β раз. Величина β обеспечивает заданный уровень вероятности ложных пеленгов во всем динамическом диапазоне пеленгуемых стационарных помех.
Для постановщиков нестационарных помех пороговый уровень, необходимый для обеспечения заданной вероятности ложных тревог, должен быть таким же, как и для непрерывной стационарной помехи той же мощности. Следовательно, при приеме мощных нестационарных помех порог Uп будет иметь недостаточный уровень для обеспечения заданной вероятности ложных тревог. Уровень порога будет меньше уровня мощности, принимаемой некоторыми боковыми лепестками. На выходе пеленгатора будут иметь место ложные пеленги.
Другим недостатком является недостаточно высокая точность определения угловых координат. Например, из-за перекоса порогового уровня или несимметрии диаграммы направленности антенны получается несоответствие между пеленгом, соответствующим центру пакета, и направлением, соответствующим максимуму ДН антенны, вследствие чего возникает ошибка определения угловой координаты ПАП.
Целью предложенного устройства является исключение ложных пеленгов на выходе пеленгатора при работе его по постановщику нестационарной помехи и увеличение точности определения угловых координат постановщиков активных помех.
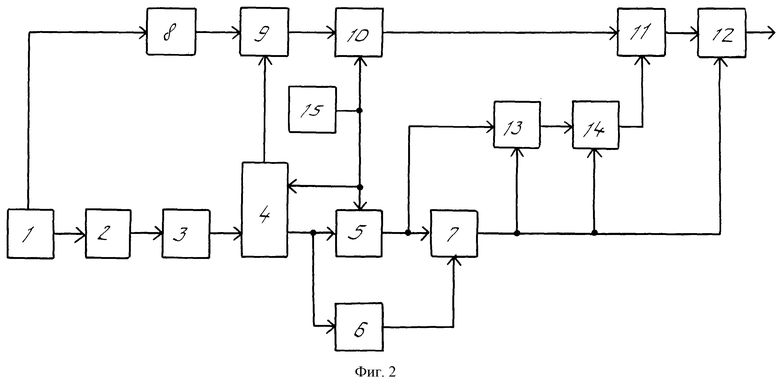
Поставленная цель достигнута посредством того, что в амплитудный пеленгатор постановщиков активных помех, взятый за прототип, состоящий из последовательно соединенных антенны, приемного устройства и детектора-интегратора, а также блока памяти амплитуд и устройства усреднения-усиления, подключенных своими выходами ко входам устройства сравнения, согласно изобретению, вводятся два устройства выбора максимума, датчик угла поворота антенны, три устройства съема координат максимума, блок памяти координат максимума, клапан и задающий генератор. Причем первое устройство выбора миксимума подключается своим входом к выходу детектора-интегратора, а выходом - ко входу блока памяти и параллельно ко входу устройства усреднения-усиления. Ко второму выходу антенной системы подключен датчик угла поворота антенны, подключенный своим выходом к устройству съема координат максимума, выход которого подключен ко входу блока памяти координат максимума, а управляющий вход устройства съема подключен к управляющему выходу устройства выбора максимума. Выход блока памяти координат максимума подключен ко входу устройства съема координат максимума в стробе пеленга, управляющий вход которого подключен к управляющему выходу второго устройства выбора максимума. Выход блока памяти амплитуд подключен параллельно первому входу устройства сравнения ко входу введенного клапана, выход которого подключен ко входу второго устройства выбора максимума. Выход устройства сравнения подключен параллельно к управляющим входам клапана, второго устройства выбора максимума и устройства съема абсолютного максимума. Выход устройства съема абсолютного максимума является выходом всего устройства. Выход задающего генератора подключен к управляющему входу устройства выбора максимума и синхровходам блока памяти координат максимума и блока памяти амплитуд сигнала.
Как показал анализ известных в данной области техники технических решений при известности самих по себе вводимых блоков, их совокупное использование с известными блоками позволяет достигнуть новый положительный эффект, указанный в цели изобретения, что подтверждает соответствие заявленного устройства критерию "существенные отличия".
Сущность предложенного устройства и достижение поставленной цели будут понятны из нижеследующего описания и приведенных графических материалов. Структурная схема устройства прототипа представлена на фиг.1, а предложенного устройства - на фиг.2, где введены обозначения: 1 - антенная система; 2 - приемное устройство; 3 - детектор-интегратор; 4 - устройство выбора максимума; 5 - блок памяти амплитуд сигналов; 6 - блок усреднения-усиления; 7 - устройство сравнения; 8 - датчик угла поворота антенны; 9 - устройство съема координат максимума; 10 - блок памяти координат максимума; 11 - устройство съема координат максимума в стробе пеленга; 12 - устройство съема абсолютного максимума; 13 - клапан; 14 - устройство выбора максимума; 15 - задающий генератор; 16 - счетно-решающее устройство.
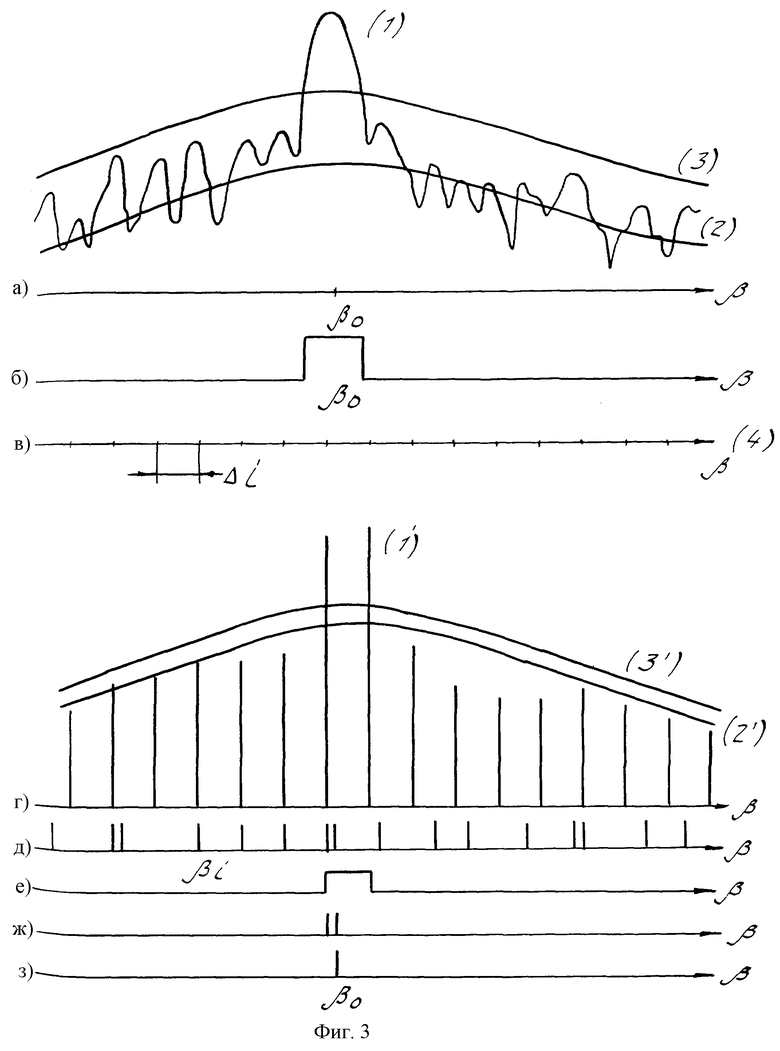
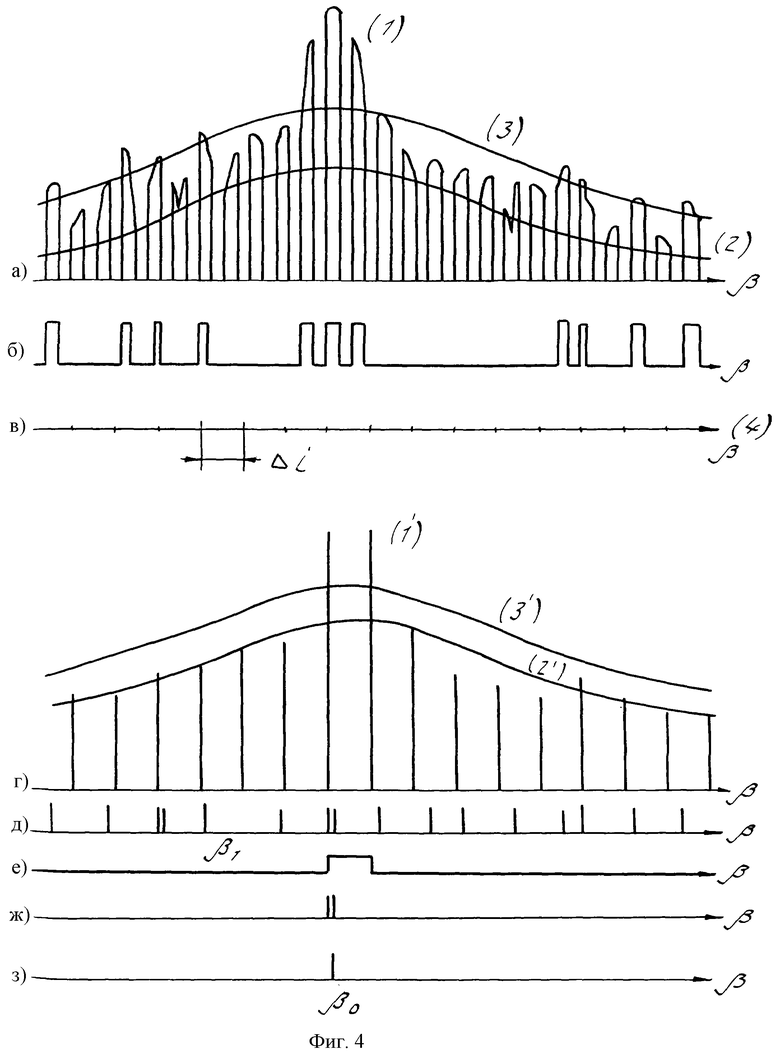
Эпюры фиг.3, 4 поясняют работу устройства прототипа (фиг.а, б) и предложенного устройства (фиг.в, г) по постановщику стационарной помехи (фиг.3) и нестационарной помехи (фиг.4). Кривые на фиг.3а, 4а имеют следующий смысл: (1) - напряжение на выходе детектора-интегратора 3, соответствующее огибающей ДН; (2) - усредненное напряжение детектора-интегратора в блоке усреднения-усиления 6; (3) - пороговый уровень на выходе блока усреднения-усиления 6.
На фиг.3б, 4б представлен результат сравнения (в устройстве сравнения 7) напряжения, соответствующего огибающей ДН (кривая I на фиг.3а, 4а), и сформированного порога Uп (кривая 3 на фиг.3а, 4а), признак пеленга.
Фиг.3в, 4в поясняют разбиение периода обзора на интервалы выбора максимумов.
На фиг.3г, 4г представлены выборки амплитуд (1) на интервалах выбора максимума, записывающиеся в блок памяти 5, соответствующие им угловые координаты, условно показанные на прямой (4) оси угловых координат, значения которых записываются в блок памяти координат 10, кривая 2 - усредненные значения выборок амплитуд, кривая 3 - пороговый уровень на выходе устройства усреднения-усиления 6.
На фиг.3д, 4д показаны соответствующие выборки угловых координат.
На фиг.3е, 4е показаны результат сравнения I и 3 фиг.3г, 4г.
На фиг.3ж, 4ж показаны угловые координаты, прошедшие на выход устройства 11.
На фиг.3з, 4з показано угловое положение βo постановщика помехи на оси угловых координат - пеленг постановщика помехи. Пеленг постановщика помехи в форме кода угла наблюдается на выходе клапана 11.
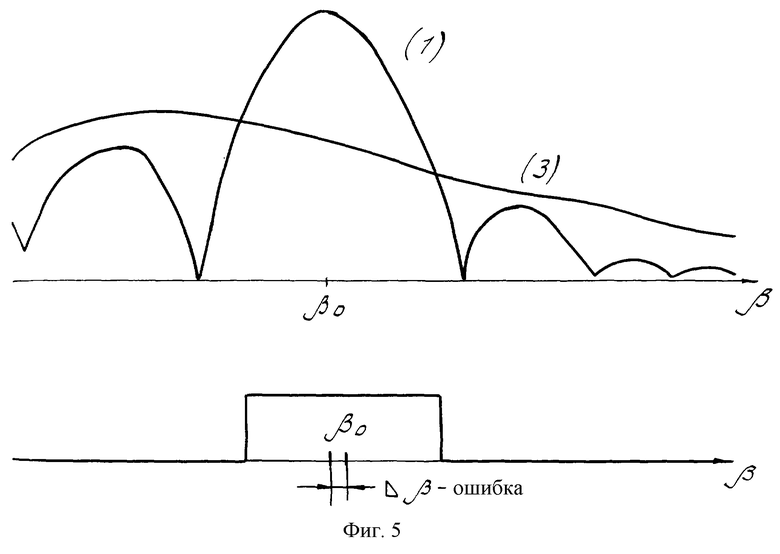
Эпюры фиг.5 поясняют увеличение точности определения угловых координат в предлагаемом устройстве. Кривые 1, 3 на фиг.5 имеют тот же смысл, что и соответствующие кривые на фиг.3.
Пеленгатор (фиг.2) содержит последовательно подключенные антенную систему 1, приемное устройство 2, детектор-интегратор 3 и устройство выбора максимума 4, к выходу которого параллельно подключены блок памяти 5 и блок усреднения-усиления 6, подключенные соответственно к первому и второму входам устройства сравнения 7. Ко второму выходу антенной системы 1 подключен датчик угла поворота антенны 8, подключенный своим выходом к устройству съема координат максимума 9. Управляющий вход устройства съема 9 подключен к управляющему выходу устройства выбора максимума 4. Выход устройства съема 9 подключен ко входу блока памяти координат максимума 10, подключенного своим выходом ко входу устройства съема координат максимума в стробе пеленга 11, выход которого подключен ко входу устройства съема координат абсолютного максимума 12. Выход блока памяти амплитуд сигналов 5 подключен ко входу клапана 13, управляющий вход которого подключен к выходу устройства сравнения 7, а выход клапана 13 подключен ко входу устройства выбора максимума 14, управляющий выход которого подключен к управляющему входу устройства съема координат максимума в стробе пеленга 11. Управляющий вход устройства съема абсолютного максимума 12 и управляющий вход устройства выбора максимума 14 подключены параллельно управляющему входу клапана 13 к выходу устройства сравнения 7. Выход задающего генератора 15 подключен параллельно к управляющему входу устройства выбора максимума 4 и синхровходам блока памяти амплитуд 5 и блока памяти координат максимумов 10. Выход устройства съема абсолютного максимума 12 является выходом всего устройства.
Поясним работу предложенного устройства. На выходе детектора-интегратора 3 имеем сигнал, соответствующий огибающей ДН антенны (см. кривую I на фиг.3а, 4а). Устройство выбора максимума 4 отбирает из всей совокупности амплитудных значений сигнала ДН на заданных интервалах Δi (см. фиг.3в, 4в) их максимальные значения. При этом в блоке памяти амплитуд сигналов 5 запоминаются их амплитудные значения (выборки 1 амплитудных значений показаны на фиг.3г, 4г), а в блоке памяти угловых координат максимума 10 запоминаются соответствующие выбранным максимальным значениям амплитуд сигнала ДН их угловые координаты (выборки угловых координат показаны на фиг.3д, 4д).
Для съема угловых координат построена следующая цепочка: второй выход антенной системы 1 подключен к датчику угла поворота антенны 8, выход которого подключен ко входу устройства съема координат максимума 9, управляющий вход которого подключен к управляющему выходу устройства выбора максимума 4, а выход устройства 9 подключен ко входу блока памяти координат максимума 10. С выхода датчика угла поворота антенны 8 на выход устройства 9 проходят по команде с устройства 4 угловые координаты βi, соответствующие максимальным значениям амплитуд на интервале Δi (см. фиг.3 и 4). Эти значения угловых координат заносятся в блок памяти координат максимума 10 и хранятся в ячейках памяти, номера которых совпадают с номерами ячеек блока памяти амплитуд сигналов 5, где хранятся соответствующие им амплитудные значения. Это соответствие достигается посылкой синхронизирующего импульса с задающего генератора 15 одновременно на синхронизирующие входы устройств 10 и 5. Этот же синхроимпульс поступает на управляющий вход устройства 4. Этим достигается синхронизация работы всего устройства. Период следования синхроимпульсов задает интервал Δi определения максимумов.
Пороговый уровень (кривая 3 на фиг.3г и 4г) формируется посредством усреднения локальных максимальных значений (1 на фиг.3 и 4). В результате получаем величину порогового уровня, удовлетворяющую заданному уровню вероятности ложных тревог, и для стационарных помех (фиг.3), и для нестационарных помех (фиг.4).
На выходе устройства сравнения 7 формируется сигнал уровня логической единицы в момент превышения амплитуды сигнала с выхода устройства 5 над пороговым уровнем (кривая 3 на (фиг.3, 4), сформированным в устройстве 6. Блок усреднения-усиления 6 предложенного устройства работает так же, как и блок 6 устройства прототипа. Сигнал, сформированный на выходе устройства 7 (его эпюры приведены на фиг.3е, 4е), поступает на управляющий вход клапана 13. Амплитуды сигналов, превысивших пороговый уровень, поступают с устройства 5 через клапан 13 на вход устройства выбора максимума 14. Из этих значений отбирается наибольшее значение, так называемый максимум максиморум, соответствующий амплитуде сигнала в максимуме ДН антенны. По управляющему выходу устройства выбора максимума 14, подключенному к управляющему входу устройства съема координат максимума в стробе пеленга 11, на выход устройства 11 проходит координата сигнала, амплитуда которого наибольшая. В случае, если амплитуда наибольшего сигнала, прошедшего через клапан 13 на вход устройства 14, следует не первой, то на выходе устройства съема 11 будет наблюдаться более, чем одна отметка в стробе пеленга (см. фиг.3ж, 4ж). Чтобы исключить промежуточные результаты, выход устройства 11 подключен ко входу устройства съема абсолютного максимума 12, управляющий вход которого подключен к выходу устройства сравнения 7. Устройство съема 12 опрашивается отрицательным фронтом сигнала (см. фиг.3е, 4е) с выхода устройства 7. В результате на выходе устройства 12 имеем угловую координату βo (см. фиг.3з, 4з), соответствующую максимуму огибающей ДН антенны.
Таким образом, как следует из приведенного описания работы предложенного устройства и приведенных графических материалов, поскольку формирование порогового уровня происходит по значениям локальных максимумов, нестационарный сигнал пеленгуется однозначным образом. В устройстве прототипа (см. фиг.4б) пеленг нестационарной помехи осуществляется со значительны количеством ложных тревог. Таким образом, в предложенном устройстве достигается положительный эффект, исключение ложных пеленгов при работе по постановщику нестационарных помех.
Другой положительный эффект - увеличение точности - достигается за счет того, что в предложенном устройстве определяется координата максимума огибающей ДН антенны. В устройстве прототипа пеленг определяется по центру импульсного сигнала на выходе устройства 7 (см. фиг.3б). Перекос порогового уровня, возникающий, например, при несимметричном расположении боковых лепестков ДН антенны (см. фиг.5) приведет в устройстве прототипа к смещению центра сигнала на выходе устройства 7 относительно максимума огибающей ДН антенны.
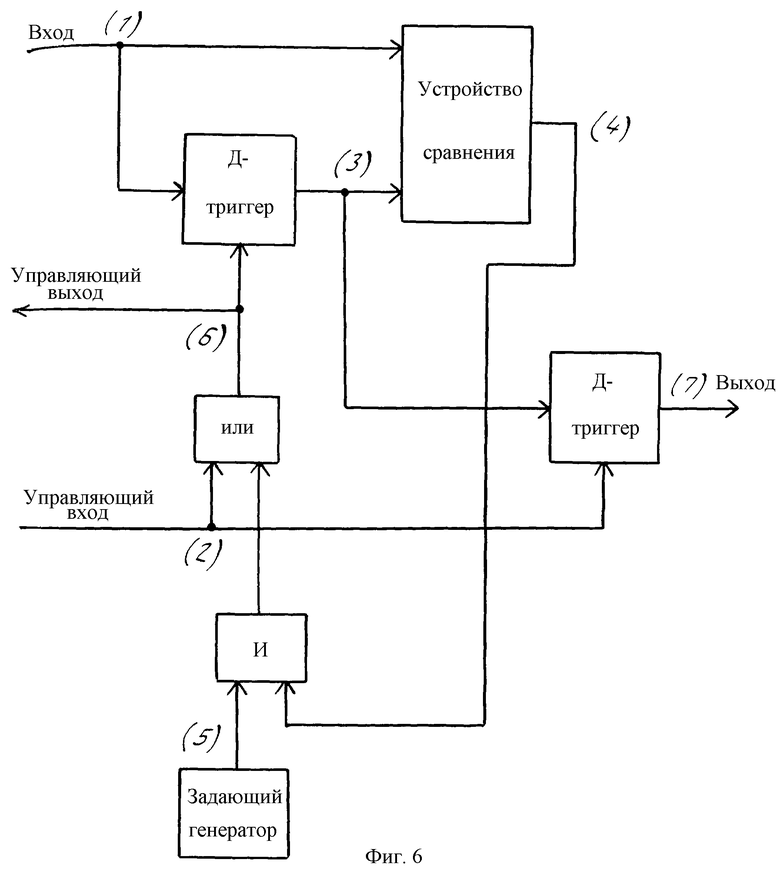
Все входящие в предложенное устройство блоки известны и легкореализуемы. Блоки 1, 2, 3, 5, 6, 7 и их работа представлены в описании устройства прототипа. Блок 10 памяти координат максимума аналогичен блоку 5. Блок 8 - устройство, отслеживающее поворот антенной системы и индицирующее величину этого поворота. Задающий генератор 15 и клапан 13 - известные и широко применяемые устройства. В качестве блоков 9, 11 и 12 могут быть применены, например, широко распространенные в цифровых устройствах Д-триггеры. Устройства выбора максимума 4, 14 могут быть реализованы, например, по схеме, представленной на фиг.6. Вход устройства выбора максимума 4, 14 подключен ко входу первого Д-триггера и к первому входу устройства сравнения. Выход первого Д-триггера подключен ко второму входу устройства сравнения и ко входу второго Д-триггера. Выход второго Д-триггера является выходом устройства выбора максимума 4, 14. Выход схемы сравнения подключен к первому входу схемы И, второй вход которой подключен к выходу задающего генератора, а выход схемы И подключен к первому входу схемы ИЛИ. Второй вход схемы ИЛИ, соединенный с синхронизирующим входом второго Д-триггера, является управляющим входом устройства выбора максимума 4, 14. Выход схемы ИЛИ подключен к синхронизирующему входу первого Д-триггера. Выход схемы ИЛИ является управляющим выходом устройства выбора максимума 4, 14. Период следования τ импульсов задающего генератора определяет дискретизации сигнала огибающей ДН антенны по оси. Период следования τ<<Т, где Т - период следования задающих импульсов устройства 15.
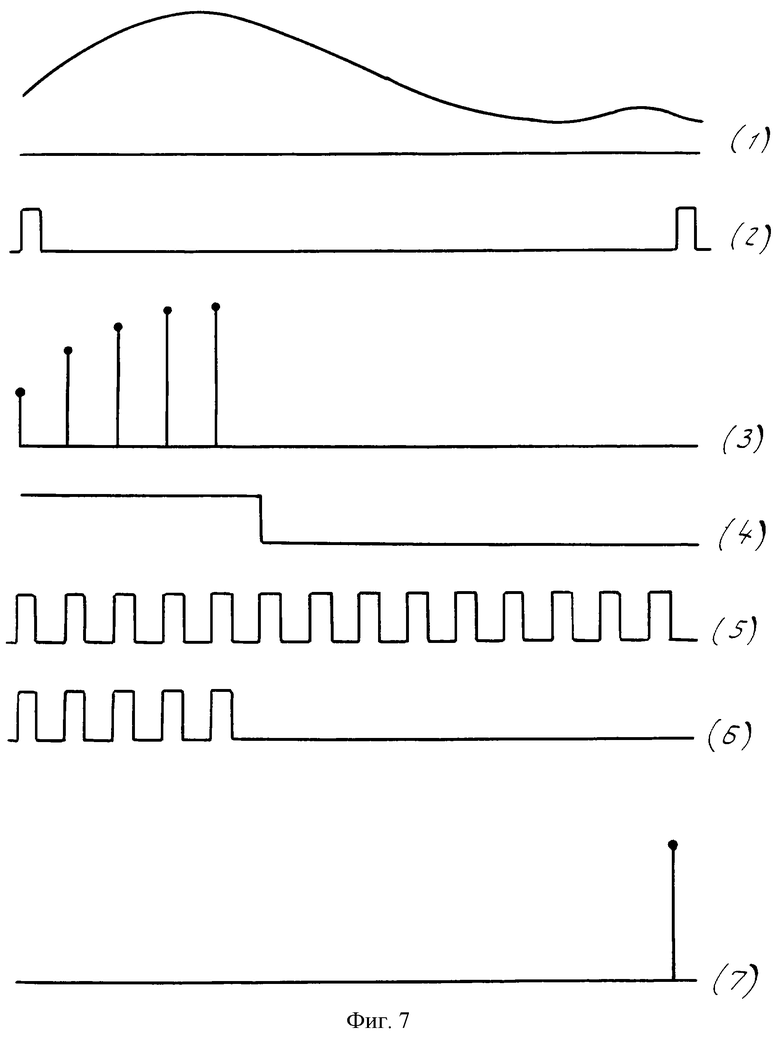
Поясним работу устройства выбора максимума 4, 14 с помощью эпюр напряжений, представленных на фиг.7 (кривые 1-7).
На вход устройства выбора максимума поступает напряжение, соответствующее огибающей ДН антенны (1). Выборка напряжения (1) по сигналу (2), поступающему с управляющего входа через схему ИЛИ на синхронизирующий вход первого Д-триггера, проходит (3) на выход первого Д-триггера и поступает на второй вход схемы сравнения. Далее на схеме сравнения сравнивается следующая выборка напряжения (1) с выборкой, записанной в первом Д-триггере. При превышении амплитуды следующей выборки над амплитудой, запомненной в первом Д-триггере, на выходе схемы сравнения формируется сигнал уровня логической единицы (4). При этом сигнал задающего генератора (5) проходит через схему И и через схему ИЛИ на синхронизирующий вход первого Д-триггера. В результате сигнал на выходе первого Д-триггера (3) обновляется. Если амплитуда следующей выборки меньше амплитуды сигнала, записанного в первом Д-триггере, то на выходе устройства сравнения сформируется сигнал уровня логического нуля (4). Это приведет к тому, что импульс с задающего генератора на синхронизирующий вход первого Д-триггера и на управляющий выход устройства не пройдет. Таким образом, на выходе первого Д-триггера устанавливается амплитуда максимального сигнала, а прохождение на управляющий выход импульса (6) сигнализирует об этом, что позволяет в предлагаемом устройстве параллельно записывать угловые координаты выборок максимальных сигналов (в устройствах 9 и 11). По сигналу управляющего входа (2) амплитуда выборки максимального сигнала переписывается на выход второго Д-триггера (7), являющегося выходом устройства выбора максимума.
Представленная на фиг.6 схема устройства выбора максимума, безусловно, не является единственной. Главное требование, предъявляемое к возможным схемам устройств выбора максимума, - выполнение указанных выше функций.
Итак, согласно вышеизложенному, предложенное устройство по сравнению с прототипом, одновременно являющимся базовым для предложенного устройства и объектом для сравнения, позволяет получить новый положительный эффект: исключение ложных пеленгов на выходе пеленгатора при работе его по постановщику нестационарной помехи и увеличение точности определения угловых координат постановщиков активных помех. Последнее достигается за счет устранения ошибки, обусловленной перекосом порогового уровня. Эта ошибка гложет быть сравнима с полной ошибкой пеленгования, то есть достигать величины 1/3 от ширины луча.
Литература
1. Каркаускас С.-Ш.М., Шабалин Р.Н., Яковлев В.Н. Об одном способе подавления сигналов боковых лепестков посадочной РЛС. “Тр. IV Юбилейной научно-технической конференции профессорско-преподавательского состава Новгородского фил. 4, 3”. - Новгород, 1973.
2. Бляхман А.Б., Зачепицкий А.А., Самарин А.В. Амплитудный пеленгатор постановщиков активных помех, RU №2074430, кл. G 01 S 3/06, прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМПЛИТУДНЫЙ ОДНОКАНАЛЬНЫЙ МНОГОЧАСТОТНЫЙ ПЕЛЕНГАТОР ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2006 |
|
RU2324196C2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1982 |
|
SU1840048A2 |
| АМПЛИТУДНЫЙ ОДНОКАНАЛЬНЫЙ МНОГОЧАСТОТНЫЙ ПЕЛЕНГАТОР ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2005 |
|
RU2305850C2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1984 |
|
SU1840388A2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1985 |
|
SU1840389A1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ДЛЯ ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1977 |
|
RU2074403C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| АДАПТИВНАЯ ЭНЕРГЕТИКО-КОРРЕЛЯЦИОННАЯ СИСТЕМА ПОДАВЛЕНИЯ БОКОВЫХ ЛЕПЕСТКОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1996 |
|
RU2116000C1 |
| ОБНАРУЖИТЕЛЬ РАДИОПЕРЕДАЧ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ (ВАРИАНТЫ) | 2005 |
|
RU2292643C1 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ЭХОСИГНАЛОВ, ПРИНИМАЕМЫХ ПО БОКОВЫМ ЛЕПЕСТКАМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2005 |
|
RU2291460C2 |
Изобретение относится к радиолокации и служит целям определения угловых координат постановщиков активных помех. Техническим результатом является устранение ложных пеленгов при пеленговании постановщиков нестационарных помех. Амплитудный пеленгатор содержит последовательно соединенные антенную систему и приемник, а также блок памяти и блок усреднения, подключенные ко входам блока сравнения, при этом в него введены первый и второй блоки выбора максимума, датчик угла поворота антенны, три блока съема координат, второй блок памяти, клапан и задающий генератор, причем сигнальный вход первого блока выбора максимума подключен к выходу приемника, а его сигнальный выход ко входам первого блока памяти и блока усреднения, управляющий выход - к управляющему входу первого блока съема координат, вход которого подключен к выходу датчика углового положения антенны, а выход - к сигнальному входу второго блока памяти, выход которого соединен со входом второго блока съема координат, к выходу второго блока съема координат подключен вход третьего блока съема координат, выход которого является выходом пеленгатора, выход задающего генератора соединен с синхронизирующими входами первого и второго блоков памяти и управляющим входом первого блока выбора максимума, выход блока сравнения соединен с управляющими входами клапана, второго блока выбора максимума и третьего блока съема координат, а сигнальный вход клапана подключен к выходу первого блока памяти, причем каждый из блоков выбора максимума содержит первый и второй блоки выборки и хранения, второй блок сравнения, второй задающий генератор, элемент И и элемент ИЛИ, при этом вход первого блока выборки и хранения соединен с одним из входов второго блока сравнения и является сигнальным входом блока выбора максимума, выход первого блока выборки и хранения подключен ко второму входу второго блока сравнения и ко входу второго блока выборки и хранения, задающий генератор подключен ко входу элемента И, ко второму входу которого подключен выход второго блока сравнения, выход элемента И соединен со входом элемента ИЛИ, второй вход которого объединен с управляющим входом второго блока выборки и хранения и является управляющим входом блока выделения максимума, выход элемента ИЛИ соединен с управляющим входом первого блока выборки и хранения и является управляющим выходом блока выбора максимума, выход второго блока выборки и хранения является сигнальным выходом блока выбора максимума. 7 ил.
Амплитудный пеленгатор, содержащий последовательно соединенные антенную систему и приемник, а также блок памяти и блок усреднения, подключенные ко входам блока сравнения, отличающийся тем, что, с целью устранения ложных пеленгов при пеленгации прерывистых помех, в него введены первый и второй блоки выбора максимума, датчик угла поворота антенны, три блока съема координат, второй блок памяти, клапан и задающий генератор, причем сигнальный вход первого блока выбора максимума подключен к выходу приемника, а его сигнальный выход - ко входам первого блока памяти и блока усреднения, управляющий выход - к управляющему входу первого блока съема координат, вход которого подключен к выходу датчика углового положения антенны, а выход - к сигнальному входу второго блока памяти, выход которого соединен со входом второго блока съема координат, к выходу второго блока съема координат подключен вход третьего блока съема координат, выход которого является выходом пеленгатора, выход задающего генератора соединен с синхронизирующими входами первого и второго блоков памяти и управляющим входом первого блока выбора максимума, выход блока сравнения соединен с управляющими входами клапана, второго блока выбора максимума и третьего блока съема координат, а сигнальный вход клапана подключен к выходу первого блока памяти, причем каждый из блоков выбора максимума содержит первый и второй блоки выборки и хранения, второй блок сравнения, второй задающий генератор, элемент И и элемент ИЛИ, при этом вход первого блока выборки и хранения соединен с одним из входов второго блока сравнения и является сигнальным входом блока выбора максимума, выход первого блока выборки и хранения подключен ко второму входу второго блока сравнения и ко входу второго блока выборки и хранения, задающий генератор подключен ко входу элемента И, ко второму входу которого подключен выход второго блока сравнения, выход элемента И соединен со входом элемента ИЛИ, второй вход которого объединен с управляющим входом второго блока выборки и хранения и является управляющим входом блока выделения максимума, выход элемента ИЛИ соединен с управляющим входом первого блока выборки и хранения и является управляющим выходом блока выбора максимума, выход второго блока выборки и хранения является сигнальным выходом блока выбора максимума.
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ДЛЯ ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1977 |
|
RU2074403C1 |
| КАРКАУСКАС С.-Ш.М | |||
| и др | |||
| Об одном способе подавления сигналов боковых лепестков посадочной РЛС | |||
| "Тр | |||
| IV Юбилейной научно-технической конференции профессорско-преподавательского состава Новгородского фил | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - Новгород, 1973. | |||

