Изобретение относится к области радиолокационной техники и может использоваться для проведения адаптивной компенсации воздействующих по боковым лепесткам диаграммы направленности суммарного и разностных каналов моноимпульсного амплитудного суммарно-разностного пеленгатора естественных и преднамеренных помех при стабилизации параметров (исключении смещения нулей и изменении крутизны) его пеленгационной характеристики и компенсации влияния ошибок калибровки приемных каналов.
Известен способ моноимпульсного суммарно-разностного пеленгования [Справочник по радиолокации под ред. М.Сколника, т.4. М.: Сов. радио, 1978, стр.16-21], заключающийся в приеме сигналов трехканальной моноимпульсной системой, содержащей суммарный и два разностных канала, переносе входных сигналов каждого канала на промежуточную частоту, усилении сигналов суммарного и разностных каналов с использованием общей системы автоматической регулировки усиления с целью обеспечения независимости сигналов суммарного и разностных каналов от уровня входного сигнала и фазовом детектировании сигналов разностных каналов при использовании в качестве опорных сигнала суммарного канала. На выходе фазовых детекторов формируются сигналы ошибки по разностным каналам, величина и знак которых определяют смещение цели от равносигнального направления.
Недостатком рассматриваемого способа моноимпульсного амплитудного суммарно-разностного пеленгования является его низкая помехозащищенность в отношении помех, воздействующих по боковым лепесткам диаграммы направленности суммарного и разностных каналов, приводящих к появлению систематических ошибок пеленгации, уровень которых зависит от отношения "сигнал/шум" и "помеха/шум" на входе пеленгатора и уровня диаграмм направленности каналов в направлении источников помех [Быков В.В., Бродский С.В., Овчинников Г.Н. Точность и устойчивость углового сопровождения цели при воздействии многоточечных помех на моноимпульсные РЛС по дальним боковым лепесткам диаграммы направленности антенны, Радиотехника, №10, 2000 г.].
Известен способ совместного формирования лучей в суммарной и разностных диаграммах направленности моноимпульсных антенных решеток [патент РФ 2120161, МПК H01Q 3/26, 1998 г.], основанный на взвешивании сигналов, принятых каждым излучателем, их разделении на два канала, суммировании сигналов, полученных с одноименных выходов делителей с соответственно прогрессивным нарастающим и убывающим фазовым сдвигом, обеспечивающим отклонение каждого луча по обобщенной координате на ±ΔU, где ΔU - расстояние максимумов лучей до равносигнального направления, и последующем образовании суммарной и разностной диаграмм направленности. Весовые коэффициенты сигналов, принятых каждым излучателем, выбирают равными алгебраической сумме весовых коэффициентов для данного излучателя, обеспечивающих формирование основной диаграммы направленности с максимумом, ориентированным в направлении Uo, и четырех диаграмм направленности, компенсирующих каждую помеху, действующую с направления Uп, из которых две диаграммы направленности ориентированы соответственно в направлениях (Uп+ΔU) и (Uп-ΔU), а другие две диаграммы направленности им зеркально симметричны относительно равносигнального направления и ориентированы соответственно в направлениях (2Uо-Uп-ΔU) и (2Uо-Uп+ΔU), причем веса симметричных пар компенсирующих диаграмм направленности выбирают одинаковыми. При этом достигается практически полное исключение искажений пеленгационной характеристики измерителя. Недостатком способа является необходимость наличия априорной информации о направлении воздействия помехи, что, как правило, не выполняется на практике.
Известны адаптивные способы и реализующие их устройства компенсации, исключающие возможность искажения формы диаграммы направленности при приеме полезного сигнала, а также частичное его подавление. В этих системах используются методы ограничения по углу, которые можно разделить на три группы.
К первой группе относятся способы и реализующие их устройства компенсации, в которых ограничения на форму диаграммы направленности вводятся с использованием пилот-сигналов [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. - М.: Радио и связь, 1986, стр.226-228]. В рамках указанных способов требуется иметь большой динамический диапазон элементов системы компенсации, а также фильтрация пилот-сигналов на выходе, что является существенными недостатками способов данной группы.
Ко второй группе относятся способы и реализующие их устройства компенсации, использующие для защиты главного лепестка диаграммы направленности "предварительную" (до адаптивного процессора) пространственную фильтрацию [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. - М.: Радио и связь, 1986, стр.228-230; патент РФ 2013833, H01Q 25/02, H01Q 21/00, 1994 г.]. Указанные методы обеспечивают снижение влияния полезного сигнала на формирование результирующей диаграммы направленности в достаточно узкой пространственной области относительно ожидаемого направления прихода полезного сигнала и имеют высокую чувствительность к аппаратным ошибкам реализации - отличиям реального амплитудно-фазового распределения на апертуре системы от заданного априорно [Jablon N.K. Adaptive beamforming with the generalized sidelobe canceller in the presence of array imperfections IEEE Trans. Antennas and Propag. 1986. Vol.34, №8, p.996-1012].
К третьей группе относятся способы и реализующие их устройства компенсации, использующие ограничения, вводимые непосредственно в контур управления с помощью пространственно-матричного фильтра [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. - М.: Радио и связь, 1986, стр.163-165, 231-237]. Недостатком способов данной группы является их высокая чувствительность к ошибкам калибровки, под которыми понимаются ошибки определения (выравнивания) характеристик приемных каналов по амплитуде и фазе. Для парирования влияния указанных ошибок известен способ, основанный на использовании регуляризованных процедур адаптивной настройки пространственных фильтров [Абрамович Ю.И., Качур В.Г. Методы защиты отличающегося от опорного полезного сигнала в адаптивных процедурах с неклассифицированной обучающей выборкой. Радиотехника и электроника, том 35, №6, 1990, стр.1235-1242], однако метод определения параметра регуляризации не определен.
Наиболее близким к предлагаемому способу (прототипом) является способ компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании, реализуемый при использовании моноимпульсного пеленгатора в составе цифровой радиолокационной головки самонаведения [Вексин С.И. Компенсация помех по боковым лепесткам в доплеровских головках самонаведения. Радиотехника, №9, 2002 г., стр.76…86; Вексин С.И. Обработка радиолокационных сигналов в доплеровских головках самонаведения. Издательство МАИ, 2005, стр.221-224].
Существо способа заключается в том, что полезные (пеленгуемые) сигналы и помехи принимают основной антенной системой и антеннами компенсационных каналов, усиливают, переносят (при необходимости) на промежуточную частоту и осуществляют согласованную внутриимпульсную обработку в идентичных приемных каналах. После согласованной обработки сигналы суммарного  , разностных по азимуту
, разностных по азимуту  и углу места
и углу места  и компенсационных
и компенсационных  каналов поступают на аналого-цифровые преобразователи, где подвергаются преобразованию в цифровую форму. Выборку цифровых отсчетов сигналов обрабатывают в устройстве формирования результирующих сигналов и вычисления пеленгов путем последовательной реализации следующих операций:
каналов поступают на аналого-цифровые преобразователи, где подвергаются преобразованию в цифровую форму. Выборку цифровых отсчетов сигналов обрабатывают в устройстве формирования результирующих сигналов и вычисления пеленгов путем последовательной реализации следующих операций:
1.1) формируют ковариационную матрицу принимаемых компенсационными каналами сигналов с элементами  путем попарного перемножения сигналов, принимаемых различными компенсационными антеннами, и усреднения полученных результатов за заданный интервал времени;
путем попарного перемножения сигналов, принимаемых различными компенсационными антеннами, и усреднения полученных результатов за заданный интервал времени;
1.2) вычисляют векторы ковариаций сигналов суммарного, разностных и компенсационных каналов с элементами  ;
;
1.3) вычисляют векторы весовых коэффициентов суммарного и разностных каналов
wj=-(Ф*)-1Gj;
1.4) проводят весовое суммирование сигналов суммарного и компенсационных и разностных и компенсационных каналов
 .
.
Полученные компенсированные сигналы суммарного и разностных каналов используют для вычисления оценок угловых координат пеленгуемого сигнала по формулам [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: Сов. радио, 1970, стр.22-26]

где µα(β) - крутизна пеленгационной характеристики по каналу азимута и угла места соответственно;  - среднее значение квадрата амплитуды сигнала суммарного канала за заданный интервал времени усреднения.
- среднее значение квадрата амплитуды сигнала суммарного канала за заданный интервал времени усреднения.
Недостатками прототипа являются низкая точность пеленгования в случае формирования ковариационной матрицы помех компенсационных каналов и вектор-столбцов ковариаций сигналов суммарного, разностных и компенсационных каналов по выборке, содержащей наряду с помехами полезный пеленгуемый сигнал, смещения нулей и изменения крутизны пеленгационных характеристик в азимутальной и угломестной плоскостях, представляющих собой зависимости математических ожиданий оценки угловых положений полезного сигнала на выходе пеленгатора в двух плоскостях пеленгации от угловых отклонений источника полезного сигнала от направления максимума суммарного канала (равносигнального направления), при формировании ковариационной матрицы помех по выборке, содержащей только помехи при их воздействии с отдельных направлений. В случае формирования ковариационной матрицы помех по выборке, содержащей кроме помех полезный пеленгуемый сигнал, "провал" в результирующей диаграмме направленности суммарного и разностных каналов будет сформирован не только в направлении помех, но и самого полезного сигнала, в результате чего в измерителе будет утеряна полезная информация о его угловых координатах. Во втором случае формирование провалов в результирующей диаграмме направленности разностных каналов может привести к смещению их нулей, а суммарного канала - к изменению его уровня, что в свою очередь приведет к изменению условий нормировки при вычислении угловых координат при реализации суммарно-разностной обработки и изменению крутизны пеленгационной характеристики.
Техническим результатом изобретения является повышение точности пеленгации за счет компенсации воздействующих по боковым лепесткам суммарного и разностных каналов пеленгатора помех за счет сохранения положений нулей и величин крутизны пеленгационных характеристик при наличии ошибок калибровки приемных каналов.
Указанный результат достигается тем, что в способе компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании, заключающемся в приеме сигналов антенной системой с суммарным (с номером j=1), разностным по азимуту (с номером j=2) и разностным по углу места (с номером j=3) и антеннами q=1, 2, …, Q компенсационных каналов, согласованной обработке сигналов каждого канала с использованием Q+3 идентичных приемных каналов, аналого-цифровом преобразовании сигналов каждого приемного канала и обработке оцифрованных сигналов каждого приемного канала в устройстве формирования результирующих сигналов и вычисления пеленгов с вычислением векторов весовых коэффициентов суммарного и разностных каналов и взвешенном суммировании сигналов суммарного и компенсационных, разностного по азимуту и компенсационных, разностного по углу места и компенсационных каналов, для вычисления векторов весовых коэффициентов предварительно формируют матрицы ограничений на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов для всех возможных направлений наблюдения в виде отсчетов значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2, …, R точках ограничений, при этом при нечетном числе точек ограничений одну из них располагают в заданном направлении наблюдения, а остальные точки ограничения располагают симметрично относительно нее и плоскостей пеленгации, при четном числе точек ограничений их положения располагают симметрично относительно направления наблюдения и плоскостей пеленгации, отклонения точек ограничений от направления наблюдения выбирают исходя из минимума среднеквадратической величины ошибки оценки угловых координат пеленгуемого сигнала для ожидаемых распределений значений угловых координат направлений прихода и мощностей пеленгуемого сигнала и помех, запоминают матрицы ограничений в устройстве памяти матриц ограничений, а при обработке оцифрованных сигналов каждого канала формируют ковариационные матрицы суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов, считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения из устройства памяти матриц ограничений, формируют i=1, 2, …, I значений параметра регуляризации  в виде геометрической прогрессии со знаменателем Δµ=2…3 и начальным значением, равным уровню собственных шумов приемных каналов пеленгатора, формируют соответствующие каждому параметру регуляризации значения векторов весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов с учетом матриц ограничений в соответствии с выражением
в виде геометрической прогрессии со знаменателем Δµ=2…3 и начальным значением, равным уровню собственных шумов приемных каналов пеленгатора, формируют соответствующие каждому параметру регуляризации значения векторов весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов с учетом матриц ограничений в соответствии с выражением
 ,
,
где Фj - ковариационная матрица принимаемых сигналов для j-го канала; I - единичная диагональная матрица;  - текущее значение параметра регуляризации;
- текущее значение параметра регуляризации;
 - матрица ограничений для j-го канала;
- матрица ограничений для j-го канала;
 - вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj;
- вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj;  ;
;  - отсчеты значений диаграмм направленности j-го суммарного или разностного и q-го компенсационного каналов в точках ограничений; «+» - знак эрмитова сопряжения, вычисляют сумму квадратов модулей весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов для каждого из значений параметра регуляризации, проводят весовое суммирование и вычисляют оценки угловых координат полезного сигнала для всех значений векторов весовых коэффициентов при различных значениях параметра регуляризации, рассчитывают значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации, определяют значения оценок угловых координат, соответствующих первому в порядке возрастания параметра регуляризации минимуму квадрата углового расстояния между оценками угловых координат при условии непревышения суммы квадратов модулей весовых коэффициентов верхнего порогового значения, а при отсутствии указанного минимума в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей весовых коэффициентов наиболее близка к нижнему пороговому значению, не превышая его.
- отсчеты значений диаграмм направленности j-го суммарного или разностного и q-го компенсационного каналов в точках ограничений; «+» - знак эрмитова сопряжения, вычисляют сумму квадратов модулей весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов для каждого из значений параметра регуляризации, проводят весовое суммирование и вычисляют оценки угловых координат полезного сигнала для всех значений векторов весовых коэффициентов при различных значениях параметра регуляризации, рассчитывают значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации, определяют значения оценок угловых координат, соответствующих первому в порядке возрастания параметра регуляризации минимуму квадрата углового расстояния между оценками угловых координат при условии непревышения суммы квадратов модулей весовых коэффициентов верхнего порогового значения, а при отсутствии указанного минимума в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей весовых коэффициентов наиболее близка к нижнему пороговому значению, не превышая его.
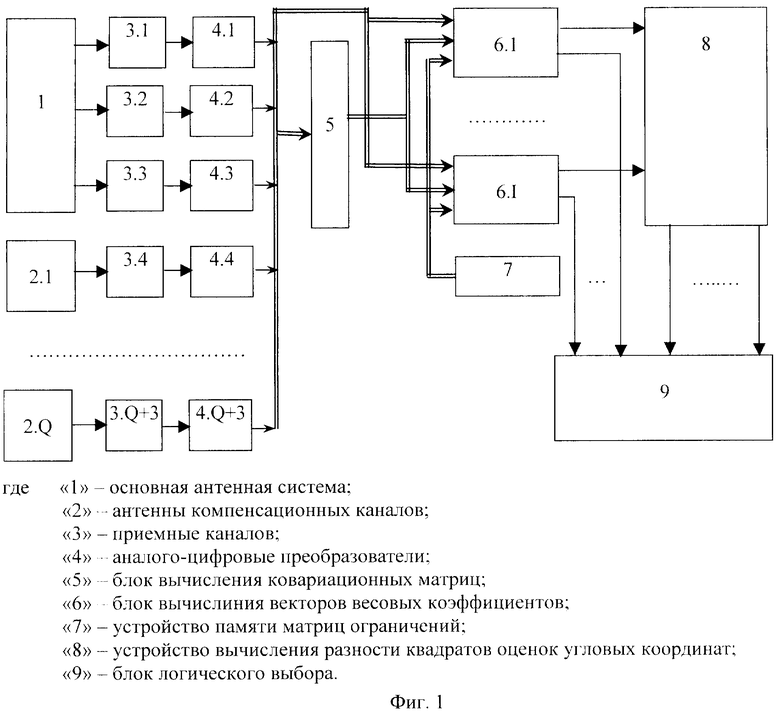
На фиг.1 приведена структурная схема устройства, реализующего заявляемый способ. На фиг.2 приведены зависимости суммы квадратов весовых коэффициентов и нормированного к максимальному значению коэффициента направленного действия суммарного канала по мощности в направлении полезного сигнала от параметра регуляризации. На фиг.3 приведены зависимости коэффициента компенсации помехи в суммарном канале от параметра регуляризации. На фиг.4 приведены зависимости оценок азимута  и угла места
и угла места  в двух реализациях моделирования работы пеленгатора с компенсацией помех от параметра регуляризации. На фиг.5 приведены зависимости величины
в двух реализациях моделирования работы пеленгатора с компенсацией помех от параметра регуляризации. На фиг.5 приведены зависимости величины  - суммы квадратов производных оценок азимута и угла места пеленгуемого сигнала по параметру регуляризации, от самого параметра регуляризации. На фиг.6 приведены результаты расчетов нормированной к ширине главного лепестка суммарного канала среднеквадратической величины ошибки оценки угловых координат пеленгуемого сигнала от нормированных к ширине диаграммы направленности суммарного канала отклонений ограничений от направления наблюдения.
- суммы квадратов производных оценок азимута и угла места пеленгуемого сигнала по параметру регуляризации, от самого параметра регуляризации. На фиг.6 приведены результаты расчетов нормированной к ширине главного лепестка суммарного канала среднеквадратической величины ошибки оценки угловых координат пеленгуемого сигнала от нормированных к ширине диаграммы направленности суммарного канала отклонений ограничений от направления наблюдения.
Устройство, реализующее заявляемый способ (фиг.1), содержит основную моноимпульсную антенную систему 1 и q=1, 2, …, Q антенн 2.1…2.Q компенсационных каналов, выходы которых подключены к Q+3 последовательно соединенным идентичным приемным каналам 3.1…3.Q+3 и аналого-цифровым преобразователям 4.1…4.Q+3, выходы которых подключены к вычислителю ковариационных матриц 5 и первым сигнальным входам i=1, 2, …, I вычислителей векторов весовых коэффициентов 6.1…6.I, выход вычислителя ковариационных матриц подключен ко вторым сигнальным входам вычислителей векторов весовых коэффициентов 6.1…6.I, к информационным входам которых подключено устройство памяти матриц ограничений 7. Первые выходы вычислителей векторов весовых коэффициентов 6.1…6.I подключены ко входам устройства вычисления разности квадратов оценок угловых координат 8. Выходы устройства вычисления разности квадратов оценок угловых координат и вторые выходы вычислителей векторов весовых коэффициентов 6.1…6.I подключены к блоку логического выбора 9.
Реализация предлагаемого способа адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании со стабилизацией параметров пеленгационной характеристики и при наличии ошибок калибровки приемных каналов состоит в следующем.
Предварительно (при настройке и калибровке пеленгатора) для всех возможных s=1, 2, …, S направлений наблюдения (угловых направлений механического или электронного ориентирования максимума главного лепестка суммарного канала основной моноимпульсной антенной системы 1) с угловыми координатами (αS, βS) в блоке 7 формируют матрицы ограничений  на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов вида
на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов вида

представляющие собой отсчеты значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2, …, R точках ограничений, отстоящих по азимуту и углу места от направления наблюдения (αS, βS) на ( ,
,  ), и запоминают их в устройстве памяти матриц ограничений 7.
), и запоминают их в устройстве памяти матриц ограничений 7.
Полезные (пеленгуемые) сигналы и помехи принимают основной антенной системой 1 и антеннами компенсационных каналов 2.1…2.Q, осуществляют согласованную внутриимпульсную обработку в идентичных приемных каналах 3.1…3.Q+3. После согласованной обработки сигналы суммарного  , разностных по азимуту
, разностных по азимуту  и углу места
и углу места  и компенсационных
и компенсационных  каналов поступают на аналого-цифровые преобразователи 4.1…4.Q+3, где подвергаются преобразованию в цифровую форму. Выборки цифровых отсчетов сигналов поступают на устройство формирования ковариационных матриц 5, где осуществляется вычисление ковариационных матриц помех суммарного и разностных каналов с элементами
каналов поступают на аналого-цифровые преобразователи 4.1…4.Q+3, где подвергаются преобразованию в цифровую форму. Выборки цифровых отсчетов сигналов поступают на устройство формирования ковариационных матриц 5, где осуществляется вычисление ковариационных матриц помех суммарного и разностных каналов с элементами  ;
;  ;
;  , и первые сигнальные входы вычислителей векторов весовых коэффициентов 6.1…6.I.
, и первые сигнальные входы вычислителей векторов весовых коэффициентов 6.1…6.I.
Сформированные в устройстве формирования ковариационных матриц 5 ковариационные матрицы суммарного и разностных каналов обрабатывают в вычислителях векторов весовых коэффициентов 6.1…6.I путем последовательной реализации следующих операций:
вычисляют параметр регуляризации  , где i - порядковый номер вычислителя векторов весовых коэффициентов; Δµ - шаг изменения параметра регуляризации;
, где i - порядковый номер вычислителя векторов весовых коэффициентов; Δµ - шаг изменения параметра регуляризации;  - начальное значение параметра регуляризации, равное мощности собственных шумов приемных каналов пеленгатора;
- начальное значение параметра регуляризации, равное мощности собственных шумов приемных каналов пеленгатора;
считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения (αS, βS) вида
из устройства памяти матриц ограничений 7;
вычисляют векторы и значения суммы квадратов модулей весовых коэффициентов суммарного и разностных каналов
 ,
,
где  - вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj, и значения суммы квадратов модулей весовых коэффициентов
- вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj, и значения суммы квадратов модулей весовых коэффициентов

суммарного и разностных каналов для различных значений параметра регуляризации, где  - норма вектора;
- норма вектора;
проводят весовое суммирование сигналов суммарного и компенсационных и разностных и компенсационных каналов и вычисляют оценки ( ,
,  ) угловых координат пеленгуемого сигнала
) угловых координат пеленгуемого сигнала
 и
и


Величины (,  ) поступают на первые, а величины wΣi - на вторые выходы вычислителей векторов весовых коэффициентов 6.1…6.I.
) поступают на первые, а величины wΣi - на вторые выходы вычислителей векторов весовых коэффициентов 6.1…6.I.
В устройстве вычисления разности квадратов оценок угловых координат 8 осуществляется вычисление значений
 ,
,
представляющих собой квадраты угловых расстояний между оценками угловых координат для соседних значений параметра регуляризации.
В блоке логического выбора 9 осуществляется выбор значения ( ,
,  ), соответствующего первому минимуму Δi при условии
), соответствующего первому минимуму Δi при условии  , где
, где  - верхнее (при поиске минимума) значение максимальной суммы квадратов модулей весовых коэффициентов; при отсутствии минимума Δi осуществляется выбор значения (, ), соответствующего
- верхнее (при поиске минимума) значение максимальной суммы квадратов модулей весовых коэффициентов; при отсутствии минимума Δi осуществляется выбор значения (, ), соответствующего  , где
, где  - нижнее (при отсутствии минимума) значение максимальной суммы квадратов модулей весовых коэффициентов.
- нижнее (при отсутствии минимума) значение максимальной суммы квадратов модулей весовых коэффициентов.
Проведем обоснование содержания отличительных операций предлагаемого способа адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании и наличии ошибок калибровки приемных каналов. При этом под ошибками калибровки понимаются любые виды ошибок, возникающих при настройке и эксплуатации приемных каналов, пересчитываемые ко входу антенн каналов и приводящие к различиям истинных и запомненных в матрицах ограничений отсчетов значений диаграмм направленности суммарного, разностных и компенсационных каналов.
Предлагаемый способ характеризуется сильной взаимосвязью операций, реализуемых при компенсации помех и собственно моноимпульсном пеленговании, и имеет следующие позволяющие достигнуть поставленной цели особенности.
Так как векторы весовых коэффициентов суммарного и разностных каналов формируются с учетом запомненной матрицы ограничений, элементы которой удовлетворяют системам уравнений
 ,
,
уровни диаграмм направленности суммарного (j=1), разностных (j=2, 3)  и компенсационных каналов
и компенсационных каналов  в точках ограничений и ошибки калибровки указанных уровней
в точках ограничений и ошибки калибровки указанных уровней  ,
,  удовлетворяют соотношениям
удовлетворяют соотношениям
 и
и  ,
,
а расположение точек ограничений выбирается из условия минимума среднеквадратической величины ошибки оценки угловых координат пеленгуемого сигнала в заданной пространственной области
 ,
,
где

- среднеквадратической величины ошибки оценки угловых координат пеленгуемого сигнала при усреднении на множестве пространственно-энергетических ситуаций и ансамблей реализаций полезного сигнала и помех;  - средний квадрат ошибки в заданной пространственно-энергетической ситуации при усреднении по ансамблям реализаций полезного сигнала и помех;
- средний квадрат ошибки в заданной пространственно-энергетической ситуации при усреднении по ансамблям реализаций полезного сигнала и помех;  - угол между векторами (
- угол между векторами ( ,
,  ) оценки и истинным (α0, β0) значением пространственных координат пеленгуемого сигнала в заданной пространственно-энергетической ситуации и реализациях сигнала и помех; Wc(α0, β0, Р0), Wп(αп, βп, Pп) - законы распределения пространственно-энергетических параметров полезного сигнала и помех соответственно, исключается существенное изменение амплитудно-фазовых соотношений между мгновенными значениями напряжений полезного сигнала на выходах суммарного и разностных каналов при реализации компенсации помех при приходе полезного сигнала с угловых направлений, соответствующих точкам ограничений и близких к ним [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. М.: Радио и связь, 1986, стр.123; Фрост. Алгоритм линейно-ограниченной обработки сигналов в адаптивной решетке. ТИИЭР, т.60, №8, 1972, стр.5-16]. Отметим, что величина
) оценки и истинным (α0, β0) значением пространственных координат пеленгуемого сигнала в заданной пространственно-энергетической ситуации и реализациях сигнала и помех; Wc(α0, β0, Р0), Wп(αп, βп, Pп) - законы распределения пространственно-энергетических параметров полезного сигнала и помех соответственно, исключается существенное изменение амплитудно-фазовых соотношений между мгновенными значениями напряжений полезного сигнала на выходах суммарного и разностных каналов при реализации компенсации помех при приходе полезного сигнала с угловых направлений, соответствующих точкам ограничений и близких к ним [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. М.: Радио и связь, 1986, стр.123; Фрост. Алгоритм линейно-ограниченной обработки сигналов в адаптивной решетке. ТИИЭР, т.60, №8, 1972, стр.5-16]. Отметим, что величина  включает в себя как смещение оценки, обусловленное искажениями результирующих диаграмм направленности суммарного и разностных каналов, так и флуктуационную составляющую, обусловленную взаимодействием и случайным характером полезного сигнала, помех и внутренних шумов в приемных каналах пеленгатора.
включает в себя как смещение оценки, обусловленное искажениями результирующих диаграмм направленности суммарного и разностных каналов, так и флуктуационную составляющую, обусловленную взаимодействием и случайным характером полезного сигнала, помех и внутренних шумов в приемных каналах пеленгатора.
Покажем необходимость проведения регуляризации и выбора оценок угловых координат, исходя из минимума величины Δi при наличии ошибок калибровки приемных каналов.
При отсутствии ошибок калибровки выполняются условия (для упрощения записи принято, что текущее направление наблюдения αs=βs=0)
 ,
,  и
и  ,
,
где Fj(αi,βi)=(Fпj(αi,βi), Fк1(αi,βi), …, FкQ(αi,βi))T; (αi, βi) - угловые направления прихода помех; m=1, 2, …, M - номера источников помех; (α0, β0) - угловое направление прихода полезного сигнала.
При наличии ошибок калибровки для m=1, 2, …, М помеховых (не защищенных ограничениями) направлений выполняются условия  , где Fискj(αm,βm)=Fj(αm,βm)+ΔFj(αm,βm) - искаженный вектор амплитудно-фазового распределения;
, где Fискj(αm,βm)=Fj(αm,βm)+ΔFj(αm,βm) - искаженный вектор амплитудно-фазового распределения;
ΔFj(αim,βm)=(ΔFпj(αm,βm), ΔFк1(αm,βm), …, ΔFкQ(αm,βm))T - вектор ошибок калибровки для j-го канала;  ,
,  - ошибки калибровки j-го суммарного или разностных и q-го компенсационного каналов соответственно.
- ошибки калибровки j-го суммарного или разностных и q-го компенсационного каналов соответственно.
В направлении (α0, β0) представим вектор ΔFj(α0, β0) в виде

где  - составляющая, коллинеарная неискаженному вектору амплитудно-фазового распределения; χ(wj) - коэффициент пропорциональности; ΔFxj(α0, β0) - дополнительная составляющая.
- составляющая, коллинеарная неискаженному вектору амплитудно-фазового распределения; χ(wj) - коэффициент пропорциональности; ΔFxj(α0, β0) - дополнительная составляющая.
Мощность полезного сигнала на выходе j-го суммарного или разностного канала:

Независимо от знака второго слагаемого в (2) глобальный минимум (Рвых→0) выходной мощности при одновременном выполнении условия ограничения  достигается при χ(w)→-1 и
достигается при χ(w)→-1 и  . Физически это соответствует такому представлению вектора искажений, что
. Физически это соответствует такому представлению вектора искажений, что 
Таким образом, при наличии ошибок калибровки и приходе полезного сигнала с направления ограничения или близкого к нему возникает фиктивный источник помехи, физическая компенсация которого происходит путем выставления "нулей" результирующих диаграмм суммарного и разностных каналов с учетом ошибок калибровки в направлении прихода полезного сигнала при выполнении ограничений относительно неискаженных диаграмм суммарного и разностных каналов.
При проведении регуляризации линейно-ограниченного фильтра при возрастании параметра  до определенного значения
до определенного значения  имеет место стабилизация значения результирующей (компенсированной) диаграммы направленности в направлении на полезный сигнал при сохранении эффективного подавления помех. При дальнейшем возрастании
имеет место стабилизация значения результирующей (компенсированной) диаграммы направленности в направлении на полезный сигнал при сохранении эффективного подавления помех. При дальнейшем возрастании  эффективность подавления помех снижается [Абрамович Ю.И., Качур В.Г. Методы защиты отличающегося от опорного полезного сигнала в адаптивных процедурах с неклассифицированной обучающей выборкой. Радиотехника и электроника, том 35, №6, 1990, стр.1235-1242]. Исходя из этой закономерности, в моноимпульсных измерителях должна существовать область стабильных оценок угловых координат пеленгуемого сигнала, близких к случаю измерений в беспомеховой обстановке и при отсутствии компенсации помех.
эффективность подавления помех снижается [Абрамович Ю.И., Качур В.Г. Методы защиты отличающегося от опорного полезного сигнала в адаптивных процедурах с неклассифицированной обучающей выборкой. Радиотехника и электроника, том 35, №6, 1990, стр.1235-1242]. Исходя из этой закономерности, в моноимпульсных измерителях должна существовать область стабильных оценок угловых координат пеленгуемого сигнала, близких к случаю измерений в беспомеховой обстановке и при отсутствии компенсации помех.
Наличие указанной закономерности подтверждалось в ходе вычислительного эксперимента. Рассматривалась реализация способа с использованием моноимпульсной основной антенной системы, реализованной на базе квадратной антенной решетки из 21×21 элементов с межэлементным расстоянием λ/2, где λ - длина волны, Q=8 компенсационных антенн с квадратными апертурами размером  каждая располагались симметрично относительно плоскостей пеленгации по краям основной антенной системы, М=1 источник помех с эквивалентным отношением сигнал/внутренний шум
каждая располагались симметрично относительно плоскостей пеленгации по краям основной антенной системы, М=1 источник помех с эквивалентным отношением сигнал/внутренний шум  , где
, где  - мощность внутренних шумов приемных каналов, для случая воздействия по максимуму главного лепестка суммарного канала, находился на угловом направлении, соответствующем максимуму первого бокового лепестка суммарного канала, направление прихода полезного сигнала соответствовало направлению наблюдения (центру пеленгационной характеристики), нормированное к ширине главного лепестка суммарного канала отклонение ограничений от направления наблюдения принималось равным ν=0,14. Исследовались зависимости суммы квадратов весовых коэффициентов
- мощность внутренних шумов приемных каналов, для случая воздействия по максимуму главного лепестка суммарного канала, находился на угловом направлении, соответствующем максимуму первого бокового лепестка суммарного канала, направление прихода полезного сигнала соответствовало направлению наблюдения (центру пеленгационной характеристики), нормированное к ширине главного лепестка суммарного канала отклонение ограничений от направления наблюдения принималось равным ν=0,14. Исследовались зависимости суммы квадратов весовых коэффициентов  и коэффициента направленного действия суммарного канала по мощности в направлении полезного сигнала
и коэффициента направленного действия суммарного канала по мощности в направлении полезного сигнала  (фиг.2), коэффициента компенсации помехи в суммарном канале Кп (фиг.3), оценок азимута
(фиг.2), коэффициента компенсации помехи в суммарном канале Кп (фиг.3), оценок азимута  и угла места
и угла места  (фиг.4) и величины
(фиг.4) и величины  (фиг.5) от параметра регуляризации
(фиг.5) от параметра регуляризации  , j=1, 2, 3. Независимые ошибки калибровки суммарного и разностных каналов формировались как ошибки множителя синфазной решетки при независимых нормально распределенных амплитудных и фазовых ошибках каждого элемента решетки со среднеквадратическими отклонениями σφ=15° и σА=15% соответственно. Независимые ошибки калибровки компенсационных каналов соответствовали ошибкам в синфазной решетке при аналогичных суммарному и разностным каналам ошибкам элементов. Результаты вычислительного эксперимента приведены для двух (1, 2) реализаций ошибок калибровки. Нанесенные на рисунке величины (
, j=1, 2, 3. Независимые ошибки калибровки суммарного и разностных каналов формировались как ошибки множителя синфазной решетки при независимых нормально распределенных амплитудных и фазовых ошибках каждого элемента решетки со среднеквадратическими отклонениями σφ=15° и σА=15% соответственно. Независимые ошибки калибровки компенсационных каналов соответствовали ошибкам в синфазной решетке при аналогичных суммарному и разностным каналам ошибкам элементов. Результаты вычислительного эксперимента приведены для двух (1, 2) реализаций ошибок калибровки. Нанесенные на рисунке величины ( ,
,  ) и (
) и ( ,
,  ) представляют собой оценки угловых координат моноимпульсным пеленгатором в присутствии ошибок калибровки суммарного и разностных каналов в двух реализациях при отсутствии внешних помех и отключенной пространственной компенсации. При
) представляют собой оценки угловых координат моноимпульсным пеленгатором в присутствии ошибок калибровки суммарного и разностных каналов в двух реализациях при отсутствии внешних помех и отключенной пространственной компенсации. При  полезный сигнал практически полностью подавляется (G→0), что подтверждает существенное влияние ошибок калибровки на амплитудные и фазовые соотношения напряжений полезного сигнала на выходе суммарного и разностных каналов при проведении пространственной компенсации помех.
полезный сигнал практически полностью подавляется (G→0), что подтверждает существенное влияние ошибок калибровки на амплитудные и фазовые соотношения напряжений полезного сигнала на выходе суммарного и разностных каналов при проведении пространственной компенсации помех.
Исходя из приведенных закономерностей для вычисления параметра регуляризации при моноимпульсном амплитудном суммарно-разностном пеленговании может быть использован критерий вида

при


где  - значения аргумента, соответствующие минимумам функции
- значения аргумента, соответствующие минимумам функции  ;
;  - верхнее (при поиске минимума) значение максимальной суммы квадратов модулей весовых коэффициентов;
- верхнее (при поиске минимума) значение максимальной суммы квадратов модулей весовых коэффициентов;  - максимальное значение параметра регуляризации, определяемое ожидаемой максимальной мощностью полезного сигнала и величиной ошибок калибровки. Дополнительные условия (4), (5) соответствуют отсечению локальных минимумов
- максимальное значение параметра регуляризации, определяемое ожидаемой максимальной мощностью полезного сигнала и величиной ошибок калибровки. Дополнительные условия (4), (5) соответствуют отсечению локальных минимумов  при малых и больших значениях параметра регуляризации соответственно.
при малых и больших значениях параметра регуляризации соответственно.
При достаточно малом (Δµ=2…3) шаге изменения параметра регуляризации в многоканальной схеме  ,
,  критерий (3) может быть заменен на
критерий (3) может быть заменен на

при дополнительных условиях, соответствующих (4), (5), где  - значения аргумента, соответствующие минимумам величины ;
- значения аргумента, соответствующие минимумам величины ;
 ,
,  - оценки азимута и угла места, определяемые для соответствующих значений
- оценки азимута и угла места, определяемые для соответствующих значений  .
.
При отсутствии минимума в (3), например при малых искажениях в отдельных направлениях или влияния шумов, в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей весовых коэффициентов наиболее близка к нижнему  пороговому значению, не превышая его. В качестве
пороговому значению, не превышая его. В качестве  может быть выбрано верхнее значение суммы квадратов весовых коэффициентов для наиболее сложных ситуаций, характеризующихся равенством числа степеней свободы системы компенсации и числа воздействующих помех.
может быть выбрано верхнее значение суммы квадратов весовых коэффициентов для наиболее сложных ситуаций, характеризующихся равенством числа степеней свободы системы компенсации и числа воздействующих помех.
Оптимальные значения верхнего и нижнего порогового уровня могут быть найдены опытным путем или с использованием математического моделирования на множестве прогнозируемых сигнально-помеховых ситуаций.
Определим оставшиеся параметры способа.
С учетом того, что введение ограничений приводит к снижению числа степеней свободы системы компенсации с Q+1 до Q+1-R, рациональное число ограничений должно быть минимальным и может составлять R=4, 5. Большее число ограничений (R=7, 9 и т.д.) может быть использовано при повышенных требованиях к точности измерения с учетом возможностей по аппаратурной реализации устройства. Симметричное расположение ограничений относительно плоскостей пеленгации и особенности их расположения при их четном или нечетном числе определяется необходимостью обеспечения симметрии пеленгационной характеристики измерителя.
Шаг изменения параметра регуляризации Δµ и максимальное значение параметра регуляризации  по результатам математического моделирования могут быть выбраны Δµ=2…3 и
по результатам математического моделирования могут быть выбраны Δµ=2…3 и  , где αиск - среднеквадратическая величина нормированной ошибки калибровки каналов; Pmax - ожидаемая максимальная мощность полезного сигнала.
, где αиск - среднеквадратическая величина нормированной ошибки калибровки каналов; Pmax - ожидаемая максимальная мощность полезного сигнала.
Проведем иллюстрацию выигрыша предлагаемого способа адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании и наличии ошибок калибровки приемных каналов по точности пеленгации в сравнении с прототипом, а также моноимпульсном амплитудном суммарно-разностном пеленговании без пространственной компенсации помех. На фиг.6 приведены результаты расчетов нормированной к ширине главного лепестка суммарного канала среднеквадратической величины ошибки пеленгации  от параметра
от параметра  , где ϑα, ϑβ - ширины диаграммы направленности суммарного канала по азимуту и углу места соответственно;
, где ϑα, ϑβ - ширины диаграммы направленности суммарного канала по азимуту и углу места соответственно;  , для различных значений ошибок калибровки, определяемых среднеквадратическими амплитудными σA и фазовыми σφ ошибками в элементах решетки, при наличии М=1 и М=3 источников помех. Результаты приведены для реализации способа с использованием моноимпульсной основной антенной системы на базе квадратной антенной решетки из 21×21 элементов с межэлементным расстоянием λ/2, где λ - длина волны, и Q=8 компенсационных антенн с квадратными апертурами размером
, для различных значений ошибок калибровки, определяемых среднеквадратическими амплитудными σA и фазовыми σφ ошибками в элементах решетки, при наличии М=1 и М=3 источников помех. Результаты приведены для реализации способа с использованием моноимпульсной основной антенной системы на базе квадратной антенной решетки из 21×21 элементов с межэлементным расстоянием λ/2, где λ - длина волны, и Q=8 компенсационных антенн с квадратными апертурами размером  каждая, расположенными симметрично относительно плоскостей пеленгации по краям основной антенной системы, нормировка при вычислении пеленга - мгновенная. Отношения полезный сигнал/шум и помеха/шум при их приеме полезного сигнала и помех по максимуму диаграммы направленности принимались равными
каждая, расположенными симметрично относительно плоскостей пеленгации по краям основной антенной системы, нормировка при вычислении пеленга - мгновенная. Отношения полезный сигнал/шум и помеха/шум при их приеме полезного сигнала и помех по максимуму диаграммы направленности принимались равными  ;
;  . Направление прихода полезного сигнала считалось распределенным равновероятно в пределах полуширины диаграммы направленности суммарного канала по азимуту и углу места, направление прихода помех - в пределах ±(1…5) от ширины диаграммы направленности суммарного канала. Ковариационная матрица помех формировалась с учетом полезного (пеленгуемого) сигнала (неклассифицированная выборка). Шаг изменения параметра регуляризации принимался равным Δµ=2, число ограничений R=5. Верхнее и нижнее пороговые значения суммы квадратов модулей весовых коэффициентов принимались равными
. Направление прихода полезного сигнала считалось распределенным равновероятно в пределах полуширины диаграммы направленности суммарного канала по азимуту и углу места, направление прихода помех - в пределах ±(1…5) от ширины диаграммы направленности суммарного канала. Ковариационная матрица помех формировалась с учетом полезного (пеленгуемого) сигнала (неклассифицированная выборка). Шаг изменения параметра регуляризации принимался равным Δµ=2, число ограничений R=5. Верхнее и нижнее пороговые значения суммы квадратов модулей весовых коэффициентов принимались равными  и
и  .
.
Как следует из результатов расчетов, оптимальное расположение ограничений соответствует величине ν=0,1…0,15, причем в заданных пространственно-энергетических ситуациях способ моноимпульсного амплитудного суммарно-разностного пеленгования без пространственной компенсации помех является полностью неработоспособным, то есть ошибки определения координат могут существенно превосходить ширину диаграммы направленности в каждой из плоскостей пеленгации, а прототип неработоспособен при неклассифицированной выборке. При классифицированной выборке для прототипа нормированные среднеквадратические значения смещений оценок угловых координат в типовых сигнально-помеховых ситуациях 5…10 раз превышают соответствующие величины для предлагаемого способа.
Предлагаемый способ является новым, поскольку из общедоступных сведений неизвестен способ адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании и наличии ошибок калибровки приемных каналов, заключающийся в приеме сигналов основной антенной системой с суммарным, разностным по азимуту, разностным по углу места каналами, антеннами q=1, 2, …, Q компенсационных каналов, согласованной обработке сигналов каждого канала с использованием Q+3 идентичных приемных каналов, аналого-цифровом преобразовании сигналов каждого приемного канала и обработке оцифрованных сигналов каждого приемного канала путем вычисления векторов весовых коэффициентов суммарного и разностных каналов и взвешенного суммирования сигналов суммарного и компенсационных, разностного по азимуту и компенсационных, разностного по углу места и компенсационных каналов, отличающийся тем, что дополнительно осуществляют предварительное формирование матриц ограничений на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов для всех возможных направлений наблюдения в виде отсчетов значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2, …, R точках ограничений, причем расположения точек ограничений выбирают исходя из минимума среднеквадратической величины ошибки оценки угловых координат пеленгуемого сигнала для ожидаемых распределений значений угловых координат направлений прихода и мощностей пеленгуемого сигнала и помех, запоминают матрицы ограничений в устройстве памяти матриц ограничений, а для устранения влияния ошибок калибровки формируют i=1, 2, …, I значений параметра регуляризации  в виде геометрической прогрессии со знаменателем Δµ=2…3 и начальным значением, равным уровню собственных шумов приемных каналов пеленгатора, формируют наборы векторов весовых коэффициентов суммарного и разностных каналов с учетом ограничений на форму их результирующей диаграммы направленности и различных значений единого для всех каналов параметра регуляризации ковариационных матриц помех, вычисляют сумму квадратов модулей весовых коэффициентов суммарного и разностных каналов для каждого из значений параметра регуляризации, вычисляют выходные сигналы суммарного и разностных каналов и осуществляют оценки угловых координат источника полезного сигнала для всех значений векторов весовых коэффициентов суммарного и разностных каналов при различных значениях параметра регуляризации, рассчитывают значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации и определяют значения оценок угловых координат, соответствующих первому минимуму квадрата углового расстояния между оценками угловых координат для соседних значений параметра регуляризации при условии непревышения суммы квадратов модулей весовых коэффициентов верхнего порогового значения, а при отсутствии указанного минимума в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей весовых коэффициентов наиболее близка к нижнему пороговому значению, не превышая его.
в виде геометрической прогрессии со знаменателем Δµ=2…3 и начальным значением, равным уровню собственных шумов приемных каналов пеленгатора, формируют наборы векторов весовых коэффициентов суммарного и разностных каналов с учетом ограничений на форму их результирующей диаграммы направленности и различных значений единого для всех каналов параметра регуляризации ковариационных матриц помех, вычисляют сумму квадратов модулей весовых коэффициентов суммарного и разностных каналов для каждого из значений параметра регуляризации, вычисляют выходные сигналы суммарного и разностных каналов и осуществляют оценки угловых координат источника полезного сигнала для всех значений векторов весовых коэффициентов суммарного и разностных каналов при различных значениях параметра регуляризации, рассчитывают значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации и определяют значения оценок угловых координат, соответствующих первому минимуму квадрата углового расстояния между оценками угловых координат для соседних значений параметра регуляризации при условии непревышения суммы квадратов модулей весовых коэффициентов верхнего порогового значения, а при отсутствии указанного минимума в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей весовых коэффициентов наиболее близка к нижнему пороговому значению, не превышая его.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций - предварительное формирование и запоминание матриц ограничений, прием сигналов основной антенной с суммарным и разностным каналами и компенсационными антеннами, согласованная обработка сигналов в идентичных приемных каналах, аналого-цифровое преобразование сигналов, формирование значений параметра регуляризации и векторов весовых коэффициентов суммарного и разностных каналов с учетом матриц ограничений и для различных значений параметра регуляризации, взвешенное суммирование сигналов суммарного, разностного и компенсационных каналов, вычисление суммы квадратов модулей весовых коэффициентов суммарного и разностных каналов для каждого из значений параметра регуляризации, вычисление выходных сигналов суммарного и разностных каналов и оценок угловых координат источника полезного сигнала для всех значений векторов весовых коэффициентов суммарного и разностных каналов при различных значениях параметра регуляризации, расчет значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации и определение значений оценок угловых координат, соответствующих первому минимуму квадрата углового расстояния между оценками угловых координат для соседних значений параметра регуляризации при условии непревышения суммы квадратов модулей весовых коэффициентов верхнего порогового значения, а при отсутствии указанного минимума принятие в качестве оценок угловых координат значений, соответствующих параметру регуляризации, при котором сумма квадратов модулей весовых коэффициентов наиболее близка к нижнему пороговому значению, но не превышает его, - обеспечивает стабилизацию параметров (положение нулей разностных диаграмм и величины крутизны) пеленгационной характеристики измерителя при наличии ошибок калибровки приемных каналов и достижении компенсации воздействующих по боковым лепесткам диаграммы направленности суммарного и разностных каналов помех.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью антенные устройства, демодуляторы, аналого-цифровые преобразователи, модули постоянных запоминающих устройств и процессоры цифровой обработки сигналов. Предъявляемые требования к точности калибровки каналов пеленгатора, при которой предлагаемый способ пространственной компенсации помех будет являться работоспособным, характеризуются значениями относительной величины ошибки калибровки порядка 1…2 децибел по амплитуде и абсолютной ошибки порядка единиц-десятков градусов по фазе и являются типовыми требованиями к точности настройки серийной пеленгационной аппаратуры.
Технико-экономическая эффективность предложенного способа заключается в повышении точности пеленгации за счет компенсации воздействующих по боковым лепесткам суммарного и разностных каналов пеленгатора помех и за счет сохранения положений нулей и величин крутизны пеленгационных характеристик при наличии ошибок калибровки приемных каналов.





Изобретение относится к области радиолокационной техники и может использоваться для проведения адаптивной компенсации воздействующих по боковым лепесткам диаграммы направленности (ДН) суммарного и разностных каналов моноимпульсного амплитудного суммарно-разностного пеленгатора естественных и преднамеренных помех при стабилизации параметров (исключении смещения нулей и изменении крутизны) его пеленгационной характеристики и наличии ошибок калибровки приемных каналов (ПК). Заявленный способ, заключающийся в приеме сигналов с текущего направления наблюдения с использованием антенной системы с суммарным (с номером j=1), разностным по азимуту (с номером j=2), разностным по углу места (с номером j=3) каналами и антенн q=1, 2, …, Q компенсационных каналов, согласованной обработке сигналов каждого канала с использованием Q+3 идентичных ПК, аналого-цифровом преобразовании сигналов каждого ПК и обработке оцифрованных сигналов каждого канала путем вычисления векторов весовых коэффициентов (ВК) суммарного, разностного по азимуту и разностного по углу места каналов и взвешенного суммирования сигналов суммарного и компенсационных, разностного по азимуту и компенсационных и разностного по углу места и компенсационных каналов, отличается тем, что для вычисления векторов ВК предварительно формируют матрицы ограничений на форму результирующей ДН суммарного, разностного по азимуту и разностного по углу места каналов для всех возможных направлений наблюдения в виде отсчетов значений ДН суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2, …, R точках ограничений, причем при нечетном числе точек ограничений одну из них располагают в заданном направлении наблюдения, а остальные точки ограничения располагают симметрично относительно нее и плоскостей пеленгации, при четном числе точек ограничений их положения располагают симметрично относительно направления наблюдения и плоскостей пеленгации, отклонения точек ограничений от направления наблюдения выбирают исходя из минимума среднеквадратической величины ошибки оценки угловых координат пеленгуемого сигнала для ожидаемых распределений значений угловых координат направлений прихода и мощностей пеленгуемого сигнала и помех, запоминают матрицы ограничений в устройстве памяти матриц ограничений, при обработке оцифрованных сигналов каждого канала формируют ковариационные матрицы суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов, считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения из устройства памяти матриц ограничений, а для устранения влияния ошибок калибровки формируют i=1, 2, …, I значений параметра регуляризации  в виде геометрической прогрессии со знаменателем Δµ=2…3 и начальным значением, равным уровню собственных шумов приемных трактов, формируют соответствующие каждому параметру регуляризации значения векторов ВК суммарного, разностного по азимуту и разностного по углу места каналов с учетом матриц ограничений в соответствии с определенным вычислительным выражением, затем вычисляют сумму квадратов модулей ВК суммарного, разностного по азимуту и разностного по углу места каналов для каждого из значений параметра регуляризации, осуществляют взвешенное суммирование сигналов суммарного и компенсационных, разностного по азимуту и компенсационных и разностного по углу места и компенсационных каналов и вычисляют оценки угловых координат источника полезного сигнала для всех значений векторов весовых коэффициентов при различных значениях параметра регуляризации, рассчитывают значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации, определяют значения оценок угловых координат, соответствующих первому в порядке возрастания параметра регуляризации минимуму квадрата углового расстояния между оценками угловых координат при условии непревышения суммы квадратов модулей ВК верхнего порогового значения, а при отсутствии указанного минимума в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей ВК наиболее близка к нижнему пороговому значению, не превышая его. Достигаемый технический результат - увеличение точности пеленгования. 6 ил.
в виде геометрической прогрессии со знаменателем Δµ=2…3 и начальным значением, равным уровню собственных шумов приемных трактов, формируют соответствующие каждому параметру регуляризации значения векторов ВК суммарного, разностного по азимуту и разностного по углу места каналов с учетом матриц ограничений в соответствии с определенным вычислительным выражением, затем вычисляют сумму квадратов модулей ВК суммарного, разностного по азимуту и разностного по углу места каналов для каждого из значений параметра регуляризации, осуществляют взвешенное суммирование сигналов суммарного и компенсационных, разностного по азимуту и компенсационных и разностного по углу места и компенсационных каналов и вычисляют оценки угловых координат источника полезного сигнала для всех значений векторов весовых коэффициентов при различных значениях параметра регуляризации, рассчитывают значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации, определяют значения оценок угловых координат, соответствующих первому в порядке возрастания параметра регуляризации минимуму квадрата углового расстояния между оценками угловых координат при условии непревышения суммы квадратов модулей ВК верхнего порогового значения, а при отсутствии указанного минимума в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей ВК наиболее близка к нижнему пороговому значению, не превышая его. Достигаемый технический результат - увеличение точности пеленгования. 6 ил.
Способ адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании и наличии ошибок калибровки приемных трактов, заключающийся в приеме сигналов с текущего направления наблюдения с использованием антенной системы с суммарным (с номером j=1), разностным по азимуту (с номером j=2), разностным по углу места (с номером j=3) каналами и антенн q=1, 2, …, Q компенсационных каналов, согласованной обработке сигналов каждого канала с использованием Q+3 идентичных приемных каналов, аналого-цифровом преобразовании сигналов каждого приемного канала и обработке оцифрованных сигналов каждого канала путем вычисления векторов весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов и взвешенного суммирования сигналов суммарного и компенсационных, разностного по азимуту и компенсационных и разностного по углу места и компенсационных каналов, отличающийся тем, что для вычисления векторов весовых коэффициентов предварительно формируют матрицы ограничений на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов для всех возможных направлений наблюдения в виде отсчетов значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2, …, R точках ограничений, причем при нечетном числе точек ограничений одну из них располагают в заданном направлении наблюдения, а остальные точки ограничения располагают симметрично относительно нее и плоскостей пеленгации, при четном числе точек ограничений их положения располагают симметрично относительно направления наблюдения и плоскостей пеленгации, отклонения точек ограничений от направления наблюдения выбирают исходя из минимума среднеквадратической величины ошибки оценки угловых координат пеленгуемого сигнала для ожидаемых распределений значений угловых координат направлений прихода и мощностей пеленгуемого сигнала и помех, запоминают матрицы ограничений в устройстве памяти матриц ограничений, при обработке оцифрованных сигналов каждого канала формируют ковариационные матрицы суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов, считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения из устройства памяти матриц ограничений, а для устранения влияния ошибок калибровки формируют i=1, 2, …, I значений параметра регуляризации в виде геометрической прогрессии со знаменателем Δµ=2…3 и начальным значением, равным уровню собственных шумов приемных каналов, формируют соответствующие каждому параметру регуляризации значения векторов весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов с учетом матриц ограничений в соответствии с выражением

где Фj - ковариационная матрица принимаемых сигналов для j-го канала; I - единичная диагональная матрица;  - текущее значение параметра регуляризации;
- текущее значение параметра регуляризации;
 - матрица ограничений для j-го канала;
- матрица ограничений для j-го канала;
 - вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj;
- вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj;  - отсчеты значений диаграмм направленности j-го суммарного или разностного и q-го компенсационного каналов в точках ограничений; «+» - знак эрмитова сопряжения, вычисляют сумму квадратов модулей весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов для каждого из значений параметра регуляризации, осуществляют взвешенное суммирование сигналов суммарного и компенсационных, разностного по азимуту и компенсационных и разностного по углу места и компенсационных каналов и вычисляют оценки угловых координат источника полезного сигнала для всех значений векторов весовых коэффициентов при различных значениях параметра регуляризации, рассчитывают значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации, определяют значения оценок угловых координат, соответствующих первому в порядке возрастания параметра регуляризации минимуму квадрата углового расстояния между оценками угловых координат при условии непревышения суммой квадратов модулей весовых коэффициентов верхнего порогового значения, а при отсутствии указанного минимума в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей весовых коэффициентов наиболее близка к нижнему пороговому значению, не превышая его.
- отсчеты значений диаграмм направленности j-го суммарного или разностного и q-го компенсационного каналов в точках ограничений; «+» - знак эрмитова сопряжения, вычисляют сумму квадратов модулей весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов для каждого из значений параметра регуляризации, осуществляют взвешенное суммирование сигналов суммарного и компенсационных, разностного по азимуту и компенсационных и разностного по углу места и компенсационных каналов и вычисляют оценки угловых координат источника полезного сигнала для всех значений векторов весовых коэффициентов при различных значениях параметра регуляризации, рассчитывают значения квадратов углового расстояния между оценками угловых координат для соседних значений параметра регуляризации, определяют значения оценок угловых координат, соответствующих первому в порядке возрастания параметра регуляризации минимуму квадрата углового расстояния между оценками угловых координат при условии непревышения суммой квадратов модулей весовых коэффициентов верхнего порогового значения, а при отсутствии указанного минимума в качестве оценок угловых координат принимают значения, соответствующие значению параметра регуляризации, при котором сумма квадратов модулей весовых коэффициентов наиболее близка к нижнему пороговому значению, не превышая его.
| ВЕКСИН С.И | |||
| Компенсация помех по боковым лепесткам в доплеровских головках самонаведения// Радиотехника | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ В МОНОИМПУЛЬСНЫХ ГОЛОВКАХ САМОНАВЕДЕНИЯ | 2006 |
|
RU2303806C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2297645C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРИЕМНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ АНТЕННОЙ СИСТЕМЫ И МОНОИМПУЛЬСНАЯ АНТЕННАЯ СИСТЕМА | 2006 |
|
RU2316860C1 |
| US 6867726 B1, 15.03.2005 | |||
| US 6118402 A, 12.09.2000 | |||
| US 5600326 A, 04.02.1997 | |||
| JP 2009162613 A, 23.07.2009 | |||
| WO 2000019230 A1, 06.04.2000. | |||

