Изобретение относится к области звукотехники, использующей прямое и обратное электромеханическое преобразование, в частности, к определению ошибки преобразования индукционного преобразователя, и может быть применено в звуковоспроизведении при помощи динамического громкоговорителя, а также при записи на магнитный носитель.
Известен способ механической обратной связи (Кинг Г. Руководство по звукотехнике. Перевод с англ. - Л.: Энергия, Ленинградское отделение, 1980, с. 204-206), заключающийся в следующем. Входной сигнал или сигнал от источника звука подается через активный фильтр в низкочастотный канал. Преобразователь согласован со схемой обратной связи полевым транзистором и появляющийся сигнал ошибки подается на компаратор вместе с входным сигналом. Обратная связь стремится обеспечить постоянную скорость колебаний диффузора и заставляет его двигаться в режиме поршня с ускорением, пропорциональным амплитуде входного сигнала.
Недостатком этого способа является то, что полученный сигнал, отражающий преобразование, обладает значительной собственной погрешностью, возникающей как из-за неадекватности динамической головки, так и из-за возникающего отставания его сигнала.
Наиболее близким к предлагаемому способу является способ, реализованный в “Звуковоспроизводящем устройстве с электромеханической обратной связью” (см. описание к патенту РФ №2030845, МПК6 Н 04 R 9/00, опубл. 10.03.95 г., бюлл. №7), заключающийся в преобразовании подведенного ко входу преобразователя электрического сигнала в звуковые колебания, формирование за счет колебаний диффузора электрического сигнала обратного электромеханического преобразования с одновременным возникновением паразитного электрического сигнала вследствие наличия электромагнитной связи между двумя преобразователями, формирование электрического сигнала, пропорционального подведенному ко входу преобразователя напряжению, формирование исходного сигнала для осуществления отрицательной обратной связи путем суммирования сигнала обратного электромеханического преобразования с сигналом, пропорциональным подведенному ко входу преобразователя напряжению.
Известно звуковоспроизводящее устройство с электромеханической обратной связью (см. описание к патенту РФ №2030845, МПК6 Н 04 R 9/00, опубл. 10.03.95г., бюлл. №7). Оно содержит электромеханическую головку со звуковой катушкой, катушку отрицательной обратной связи, входной сумматор, усилитель, две магнитосвязанные катушки, первая из которых включена последовательно со звуковой электродинамической головкой, а вторая - последовательно и встречно с катушкой отрицательной обратной связи, которая жестко закреплена на звуковой катушке электродинамической головки.
Недостаток известного способа и устройства заключается в том, что они не позволяют повысить качество электромеханического преобразования. Это объясняется тем, что существующие различия характеристик преобразователей (амплитудно-частотных, фазочастотных, их комплексного сопротивления) и дополнительные паразитные связи, возникающие при последовательном соединении катушек, приводят к “засорению” полученного сигнала для введения “отрицательной обратной связи” паразитными сигналами и, как следствие этого, к дополнительному искажению воспроизводимых звуковых колебаний.
Задачей, решаемой изобретениями, является устранение указанных недостатков.
Техническим результатом является получение достоверного сигнала преобразования подводимой электрической энергии в механическую энергию и обратно за счет формирования самостоятельного сигнала обратного преобразования высокой достоверности (создания активного динамического микрофона) и компенсации конструктивных недостатков преобразователей и паразитных связей между ними, а также использование его для целей автоматического управления прямым и обратным преобразованиями (акустической обратной связи).
Указанный технический результат достигается тем, что в предлагаемом способе формирования сигнала электромеханического преобразования, включающем формирование сигналов, отражающих процессы преобразования и независимых от параметров преобразования электрических сигналов в механические и наоборот, по меньшей мере, однократное суммирование сформированных зависимых и независимых сигналов между собой, формирование сигналов, независимых от параметров прямого преобразования, дополнительно формируют сигналы, отражающие процессы, протекающие при преобразовании и зависимые от параметров прямого преобразования, при этом сигналы, зависимые и независимые от параметров преобразований, корректируют независимо друг от друга перед их суммированием.
Кроме того:
- сигналы корректируют путем изменения их амплитудно-частотных и/или фазочастотных характеристик;
- прямым электромеханическим преобразованием осуществляют электромеханическое преобразование электрического сигнала в звуковые колебания, а обратным электромеханическим преобразованием осуществляют преобразование звуковых колебаний в электрический сигнал;
- прямое электромеханическое преобразование осуществляют перед обратным;
- обратное электромеханическое преобразование осуществляют перед прямым.
Указанный технический результат в части устройства достигается тем, что в устройстве для формирования сигнала электромеханического преобразования, включающем электромеханический преобразователь с рабочей катушкой, катушку отрицательной обратной связи, жестко закрепленную на рабочей катушке электромеханического преобразователя, формирователь выходного сигнала, датчик тока, включенный последовательно с рабочей катушкой электромеханического преобразователя, выход которого через соответствующий корректирующий элемент подключен к соответствующему входу формирователя выходного сигнала, датчик тока, включенный последовательно с катушкой отрицательной обратной связи, выход которого подключен через соответствующий корректирующий элемент к соответствующему входу формирователя выходного сигнала, выход катушки отрицательной обратной связи и выход формирователя выходного сигнала подключены через соответствующие корректирующие элементы к соответствующим входам формирователя выходного сигнала, имеющего внешний вход входного сигнала, а катушка отрицательной обратной связи расположена в поле действия магнитных силовых линий электромеханического преобразователя.
Кроме того:
- формирователь выходного сигнала ошибки включает сумматор, выход которого подключен через усилитель к выходу формирователя, а первый, второй, третий, четвертый и пятый входы сумматора являются соответствующими входами формирователя;
- корректирующие элементы выполнены на основе аналоговой (трансформаторов, конденсаторов, индуктивностей, резисторов, операционных усилителей) и цифровой (ЦАП, АЦП, микропроцессоры) техники;
- формирователь выходного сигнала и корректирующие элементы выполнены в виде микропроцессора (сумматора);
- электромеханический преобразователь выполнен в виде электродинамической головки.
Из уровня техники неизвестны способы и устройства, обладающие заявляемой совокупностью существенных признаков, следовательно изобретения удовлетворяют критерию “новизна”. Из уровня техники на дату подачи заявки неизвестны признаки, отличающие заявляемые способ и устройство от существующих, и, следовательно, заявляемые объекты удовлетворяют критерию “изобретательский уровень”.
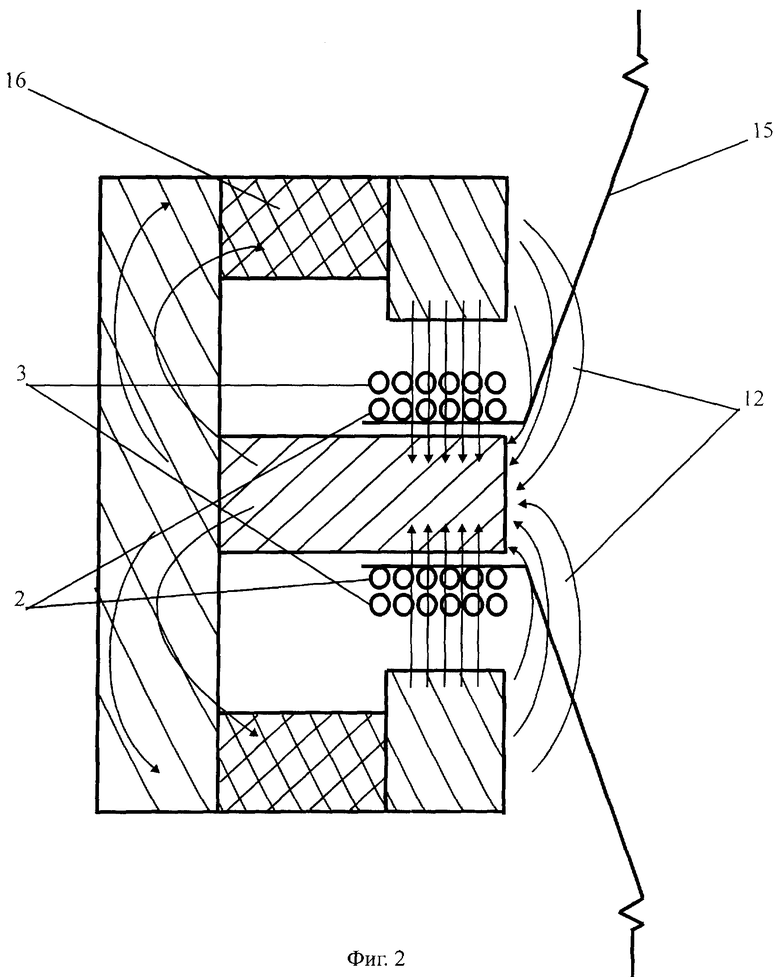
Изобретения поясняются с помощью чертежей, где на фиг.1 приведена структурная схема устройства для формирования сигнала электромеханического преобразования, на фиг.2 - схема электродинамической головки.
Формирование сигналов, связанных с преобразованием, обусловлено необходимостью получения достоверного сигнала преобразования.
Коррекция полученных сигналов обусловлена необходимостью создания условий для последующего их суммирования, обеспечивающего достижение технического результата. Суммирование скорректированных сигналов обусловлено необходимостью формирования сигнала, отражающего преобразование. Суммирование обеспечивает исключение влияния свойств преобразователей и корректоров на полученный результат.
Формирование сигнала преобразования обусловлено необходимостью использования его в качестве обратной связи для прямого преобразователя и выходного сигнала обратного преобразователя.
Введение обратной связи обусловлено необходимостью снижения ошибки преобразования, связанной со свойствами преобразователей и связью между ними, и одновременного получения выходного сигнала обратного преобразования.
Заявляемый способ реализуется в устройстве для формирования сигнала электромеханического преобразования. Устройство для формирования сигнала электромеханического преобразования включает электромеханический преобразователь 1 (фиг.1) с рабочей катушкой 2, дополнительную катушку 3, жестко закрепленную на рабочей катушке 2 электромеханического преобразователя, формирователь 4 выходного сигнала, датчик 5 тока, включенный последовательно с рабочей катушкой 2 электромеханического преобразователя, выход которого через соответствующий корректирующий элемент 6 подключен к 1’ входу формирователя 4 выходного сигнала, датчик 7 тока, включенный последовательно с дополнительной катушкой 3 датчика, выход которого подключен через соответствующий корректирующий элемент 8 ко 2’ входу формирователя 4 выходного сигнала, один из выводов катушки 3 и выход усилителя 14 подключены через соответствующие корректирующие элементы 9 и 10 к соответственно 3’ и 4’ входам формирователя 4 выходного сигнала, имеющего внешний (пятый) вход 11 входного сигнала, а катушка 3 находится в поле действия магнитных силовых линий 12 электромеханического преобразователя 1 (фиг.2).
Формирователь 4 выходного сигнала (фиг.1) включает сумматор 13, выход которого подключен через усилитель 14 к выходу 17 формирователя 4, а первый, второй, третий, четвертый и пятый входы сумматора 13 являются соответствующими входами формирователя 4.
Электромеханический преобразователь 1 может быть выполнен на основе электродинамической головки (фиг.2), имеющей мембрану (или диффузор) 15, магнитную систему 16, в поле действия силовых магнитных линий которой расположены катушки 2 и 3, жестко связанные механически с мембраной 15.
Устройство для формирования сигнала электромеханического преобразования работает следующим образом.
В исходном состоянии, когда отсутствуют входные сигналы устройства, а также отсутствует звуковое давление на чувствительный элемент (мембрану) 15 электромеханического преобразователя 1, на катушке 3 отсутствует напряжение, на выходе датчика тока 7 также отсутствуют сигналы, т.к. в исходном состоянии через рабочую катушку 2 электромеханического преобразователя 1 переменный ток не протекает, а сами катушки 2 и 3 неподвижны. В результате на выходе сумматора 13 и, следовательно, на выходе усилителя 14 отсутствуют сигналы звуковой частоты. Катушка 2, находящаяся в магнитном поле электродинамической головки 1, а, следовательно, и мембрана 15, находятся в состоянии покоя.
При появлении на пятом входе 11 сумматора 13 входного сигнала, последний поступает на выход сумматора 13, усиливается усилителем 14 и поступает на катушку 2 электромеханического преобразователя, заставляя ее перемещаться в магнитном поле электромеханического преобразователя, пересекая магнитные силовые линии 12. Перемещение катушки 2 вызывается также внешним звуковым давлением на мембрану 15 электромеханического преобразователя 1.
В результате, при движении катушки 2 перпендикулярно магнитным силовым линиям 12, в катушке 2, возникает электродвижущая сила (ЭДС) индукции, которая наводит в дополнительной катушке 3 датчика ЭДС взаимоиндукции, так как катушка 3 жестко закреплена на катушке 2 и перемещается вместе с катушкой 2, пересекая магнитные силовые линии 12 электромеханического преобразователя. Кроме того, катушки 2 и 3 обладают собственными амплитудно-частотными характеристиками, что вызывает наличие аддитивных искажений сигнала в катушке 3, при этом сигнал на выходе катушки 3 можно представить в виде суммы:
Uкат 3=Евз+Еинд+U(ZL2)+U(ZL3),
где Евз - ЭДС взаимоиндукции в катушке 3, пропорциональная току через катушку 2;
Еинд - ЭДС индукции от движения в магнитном поле катушки;
U(ZL2) - разность потенциалов на концах катушки 2, зависящая от комплексного сопротивления катушки 2 - ZL2;
U(ZL3) - разность потенциалов на концах катушки 3, зависящая от комплексного сопротивления катушки 3 - ZL3.
Корректирующим элементом 10 осуществляется дифференцирование сигнала с выхода формирователя выходного сигнала.
Ток катушки 2 протекает через последовательно соединенный с ней датчик тока 5, на выходе которого формируется сигнал, пропорциональный току через катушку 2, который является зависимым от конструктивных свойств электромеханического преобразователя 1 и отражает его частотные свойства:
Uд5=U (ZL2),
где Uд5 - напряжение на выходе датчика 5;
ZL2 - сопротивление катушки 2.
Ток катушки 3 протекает через последовательно соединенный с ней датчик 7, на выходе которого формируется сигнал, пропорциональный току через катушку 3, который является зависимым от конструктивных свойств электромеханического преобразователя и отражает частотные свойства катушки 3:
Uд7=U (ZL3),
где Uд7 - напряжение на выходе датчика 7;
ZL3 - сопротивление катушки 3.
На входы сумматора 13 поступают входной сигнал устройства Uвх, a также слагаемые, формирующие сигнал обратной связи Uкат3, Uэ10, Uд5 и Uд7. На сумматоре 13 осуществляется вычитание сигналов Uкат3 из суммы Uвх, Uэ10, Uд5 и Uд7.
Таким образом на выходе сумматора 13 формируется результирующая сумма сигналов Uвых=Uвх+Uэ10+Uд5+Uд7-((Евз+Еинд+U(ZL2)+U(ZL3))=UBX-Еинд, где Uвх - входной сигнал устройства; Еинд - сигнал ошибки устройства.
Корректирующие элементы 6, 8, 9 и 10 выполняют функции коррекции входных сигналов и необходимое согласование уровней сигналов.
Полученный таким образом сигнал подается через усилитель 14 на рабочую катушку 2 электромеханического преобразователя 1, стремясь компенсировать внешние силы, воздействующие на мембрану 15 и внутренние силы, вызванные конструктивными недостатками (особенностями) преобразователя. Чем глубже отрицательная обратная связь, определяемая коэффициентом усиления усилителя 14, тем меньше влияние инерции мембраны 15, неравномерности магнитного поля преобразователя и др. негативных факторов.
Сигнал отрицательной обратной связи формируется с учетом звукового давления на мембрану, ее инерции, частотных резонансов электромагнитной головки и других неблагоприятных факторов с учетом воздействия вторичной индукции и паразитных емкостных связей, что позволяет вводить более глубокую отрицательную обратную связь, а наличие глубокой отрицательной обратной связи позволяет снизить неравномерности частотной характеристики звуковоспроизводящей системы, уменьшить нелинейные искажения, расширить динамический диапазон системы в целом.
Предлагаемое устройство является обратимой системой, т.е. предназначено также и для обратного преобразования механических (звуковых) колебаний в электрические сигналы. При этом в исходном состоянии, когда отсутствует звуковое давление на мембрану электромеханического преобразователя, на катушке 3 отсутствует напряжение, на выходе датчиков 5 и 7 также отсутствуют сигналы, т.к. в исходном состоянии через рабочую катушку 2 электромеханического преобразователя 1 переменный ток не протекает. В результате на выходе сумматора 13 и, следовательно, на выходе усилителя 14 отсутствуют сигналы звуковой частоты. Катушка 2, находящаяся в магнитном поле электромеханического преобразователя 1, а, следовательно, и мембрана, находятся в состоянии покоя.
При возникновении внешнего воздействия на мембрану электромеханического преобразователя 1, звуковые колебания передаются от мембраны на катушку 2, которая в результате стремится совершить перемещение, находясь в магнитном поле электромеханического преобразователя 1. При возникновении движения катушки 2, перпендикулярного магнитным силовым линиям 12, в катушке 2 возникает ЭДС индукции, которая наводит в катушке 3 ЭДС взаимоиндукции, так как катушка 3 жестко закреплена на катушке 2 и перемещается вместе с катушкой 2.
Ток, наведенный в катушке 2 из-за ее движения перпендикулярно магнитным силовым линиям электродинамической головки 1, протекает через последовательно соединенный с ней датчик 5, на выходе которого формируется сигнал, пропорциональный току через катушку 2, который отражает частотные свойства системы мембрана - катушка 2 преобразователя 1.
В то же время сигнал с выхода датчика 7 отражает частотные свойства электромеханического преобразователя.
Еще одно слагаемое формируется на выходе корректирующего элемента 10, подключенного к выходу формирователя 4 путем дифференцирования выходного сигнала формирователя 4.
Сигналы с выходов корректирующих элементов 6, 8, 9 и 10 поступают на сумматор 13, на выходе которого формируется “чистый” сигнал ошибки, пропорциональный сумме сил, воздействующих на катушки 2 и 3 и вызывающих их перемещение в магнитном поле преобразователя 1.
Полученный таким образом сигнал подается через усилитель 14 на рабочую катушку 2 преобразователя 1, стремясь возвратить катушку 2, а следовательно, и мембрану в исходное состояние. Чем глубже отрицательная обратная связь, определяемая коэффициентом усиления усилителя 14, тем меньшее перемещение делает мембрана электродинамической головки, тем меньше влияние инерции мембраны, неравномерности магнитных силовых линий электродинамической головки и др. негативных факторов.
Таким образом, использование предложенных способа и устройства электромеханического преобразования обеспечит улучшение качества преобразования за счет устранения влияния параметров преобразования, определяемых конструктивными особенностями электромеханического преобразователя и вызывающих ухудшение амплитудно-частотно-фазовых характеристик электромеханического преобразования.
Способ и устройство могут быть реализованы с помощью известных и широко применяемых в этой области техники элементов и технологий, т.е. заявляемые изобретения удовлетворяют критерию “промышленная применимость”.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗВУКОВОСПРОИЗВОДЯЩЕЕ УСТРОЙСТВО С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 1990 |
|
RU2030845C1 |
| Устройство для воспроизведения силовых воздействий | 1975 |
|
SU578575A1 |
| СПОСОБ УМЕНЬШЕНИЯ ИСКАЖЕНИЙ ЗВУКОВОГО СИГНАЛА ГРОМКОГОВОРИТЕЛЯ | 2000 |
|
RU2161379C1 |
| ЭЛЕКТРОДИНАМИЧЕСКАЯ ГОЛОВКА ВОСПРОИЗВЕДЕНИЯ ЗВУКА | 2013 |
|
RU2552400C2 |
| ЗВУКОВОСПРОИЗВОДЯЩЕЕ УСТРОЙСТВО С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 1990 |
|
RU2030844C1 |
| Электродинамический громкоговоритель | 1975 |
|
SU634492A1 |
| ЗВУКОВОСПРОИЗВОДЯЩЕЕ УСТРОЙСТВО С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2005 |
|
RU2313923C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН В ЭЛЕКТРИЧЕСКИЕ СИГНАЛЫ | 1996 |
|
RU2102794C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРОСТЕНД | 2014 |
|
RU2572070C1 |

Изобретение относится к области звукотехники, использующей прямое и обратное электромеханическое преобразование, в частности, к определению ошибки преобразования индукционного преобразователя, и может быть применено в звуковоспроизведении при помощи динамического громкоговорителя, а также при записи на магнитный носитель. Предложенный способ включает формирование исходного электрического сигнала, отражающего процесс преобразования и содержащего сопутствующие ему паразитные сигналы, зависимые от параметров электромеханического преобразования с, по меньшей мере, однократным суммированием полученных сигналов. При этом дополнительно с формированием сигнала, отражающего процесс электромеханического преобразования, формируют паразитные сигналы, зависимые от параметров электромеханического преобразования, каждый из которых корректируют независимо друг от друга, путем изменения значений их амплитудно-частотных и/или фазочастотных параметров для последующего суммирования с сигналом преобразования и получения сигнала преобразования, свободного от паразитных сигналов. Также предложено устройство, реализующее данный способ. Использование предложенных способа и устройства для формирования электрического сигнала электромеханического преобразования обеспечивает улучшение качества преобразования за счет устранения влияния параметров преобразования, определяемых конструктивными особенностями электромеханического преобразователя и вызывающих ухудшение амплитудно-частотно-фазовых характеристик электромеханического преобразования. 2 с. и 5 з.п. ф-лы, 2 ил.
| ЗВУКОВОСПРОИЗВОДЯЩЕЕ УСТРОЙСТВО С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 1990 |
|
RU2030845C1 |
| СПОСОБ УМЕНЬШЕНИЯ ИСКАЖЕНИЙ ЗВУКОВОГО СИГНАЛА ГРОМКОГОВОРИТЕЛЯ | 2000 |
|
RU2161379C1 |
| US 5197104, 23.03.1993 | |||
| US 6104817, 15.08.2000 | |||
| US 4256923, 17.03.1981 | |||
| US 4335274, 15.01.1982 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| DE 19942526, 27.04.2000 | |||
| US 4550430, 29.10.1985 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |

