Изобретение относится к медицинской реабилитационной технике, может быть использовано для реабилитации пациентов с различной патологией позвоночника и для профилактики патологии позвоночника. Занимаясь на тренажере, человек находится в вертикальном положении и производит дозированную тренировку мышц (коротких глубоких околопозвоночных, длинных околопозвоночных, гр. iliopsas) и связок (межостистых, межсуставных, передних и задних продольных) во всех отделах позвоночника, по необходимости мобилизуя или стабилизируя двигательные сегменты.
Реабилитационное устройство для адаптации позвоночника к нагрузкам по данному изобретению может быть использовано как в медицинских учреждениях, так и в оздоровительных и спортивных центрах. Вместе с тем согласно настоящему изобретению предлагается устройство, которое может быть использовано и в домашних условиях.
Известно устройство для укрепления мышц спины, содержащее основание, элемент для фиксации нижних конечностей тренирующегося, нагрузочный элемент, создающий нагрузку на околопозвоночные мышцы (см. патент США 5085429, А 63 В 23/02, 92). Данное устройство не позволяет обеспечить дозированную, прицельную нагрузку и адаптировать позвоночник к осевой нагрузке.
Известно устройство для разработки позвоночника, которое обеспечивает фиксацию спины и укрепление верхней части спины за счет использования рычажного механизма (заявка 94031934, БИ №20, 20.07.96). Данное устройство не позволяет совершать сгибание и разгибание в поясничном отделе и, следовательно, не укрепляет мышцы и связки, участвующие в данном движении.
Известно устройство для тренировки мышц спины, содержащее основание с жестко закрепленной стойкой, опору для грудного отдела позвоночника, упор для рук, подвижную опору для нижнепоясничного отдела позвоночника и таза, соединенную с нагрузочным механизмом (патент RU 2089255, А 63 Н 23/02, А 61 Н 1/02, 1997).
К недостаткам данного устройства относится малый диапазон индивидуальных регулировок, что не обеспечивает возможности фиксации тела человека в наиболее выгодном положении с учетом индивидуальных особенностей, вследствие чего данное устройство не позволяет проводить мобилизацию и не обеспечивает целенаправленной тренировки мышц, отвечающих за изменение степени физиологических изгибов позвоночника. Данное устройство не предназначено для использования в домашних условиях.
Известно устройство для тренировки мышц спины, содержащее опорную раму, неподвижные фиксаторы для грудного и пояснично-грудного отделов позвоночника, подколенный и фиксатор для стоп, упоры для рук, подвижную опору для нижнепоясничного отдела позвоночника и таза, соединенную нагрузочным элементом с опорной рамой. Устройство наделено функцией изменения наклона рабочей плоскости (заявка 98110332, БИ №7, 10.03.2000). К недостаткам данного устройства относится ограниченное количество точек фиксации и регулировок. Вследствие этого не обеспечивается целенаправленная тренировка мышц, отвечающих за изменение степени физиологических изгибов позвоночника. Практически отсутствует возможность акцентировать нагрузку на выбранном двигательном сегменте, проводить мобилизацию и функциональные пробы, а также опосредованно воздействовать на мышцы и связки шейного отдела позвоночника. Известное устройство выбрано в качестве наиболее близкого аналога.
Задачами настоящего изобретения являются возможность акцентировать нагрузку на выбранном двигательном сегменте; возможность проведения мобилизации и стабилизации двигательных сегментов; возможности проведения функциональных проб и фиксирования результата; возможность формирования опосредованной нагрузки на шейный и грудной отделы позвоночника; исключение ошибок движения при работе на тренажере; создание физиологической нагрузки; повышение комфортности расположения пациента; обеспечение изменения угла наклона рабочей плоскости.
Реабилитационное устройство для адаптации позвоночника к нагрузкам, содержащее опорную раму, неподвижные фиксаторы для грудного и поянично-грудного отделов позвоночника, подколенный и фиксатор для стоп, упоры для рук, подвижную опору для нижнепоясничного отдела позвоночника и таза, соединенную нагрузочным элементом с опорной рамой, отличается от известных устройств тем, что на опорной раме расположено пять поперечных параллельных элементов, из которых два нижних (фиксатор для стоп и подколенный) и два верхних (фиксатор для пояснично-грудного и грудного отделов позвоночника) неподвижны, фиксатор для стоп и фиксатор для пояснично-грудного перехода позвоночника образуют рабочую плоскость, средний элемент (опора для нижнепоясничного отдела позвоночника и таза) обладает возможностью перемещения под дозированной нагрузкой в плоскости, перпендикулярной рабочей, он снабжен датчиком угла поворота и связан с жидкокристаллическим индикатором, рабочие элементы крепятся к опорной раме с возможностью регулировки по вертикали двух верхних и двух нижних фиксаторов относительно средней опоры, причем фиксатор для грудного отдела позвоночника и подколенный фиксатор установлены с возможностью регулировки положения в горизонтальной плоскости, подколенный фиксатор вынесен за пределы рабочей плоскости, опорная рама снабжена механизмом изменения угла наклона рабочей плоскости.
Поставленные задачи решены с помощью следующих существенных признаков: устройство содержит дополнительный фиксатор для грудного отдела позвоночника, выполненный с возможностью регулировки по горизонтали и вертикали; подколенный фиксатор вынесен за пределы рабочей плоскости, снабжен регулировкой по горизонтали и покрыт мягкой изоляцией; добавлен датчик угла поворота; добавлен жидкокристаллический индикатор для контроля правильности выполнения движения по временным фазам.
Предлагаемая совокупность существенных признаков согласно изобретению может быть использована как в стационарном, так и в переносном и настенном вариантах, при этом будет обеспечено достижение одного и того же результата за счет единой схемы нагружения.
Реабилитационное устройство для адаптации позвоночника к нагрузкам позволяет тренировать мышцы (короткие глубокие околопозвоночные, длинные околопозвоночные, гр. iliopsas) и связки (межостистые, межсуставные, передние и задние продольные), проводить мобилизацию или стабилизацию двигательных сегментов во всех отделах позвоночника, локализуя нагрузку с учетом индивидуальных особенностей человека.
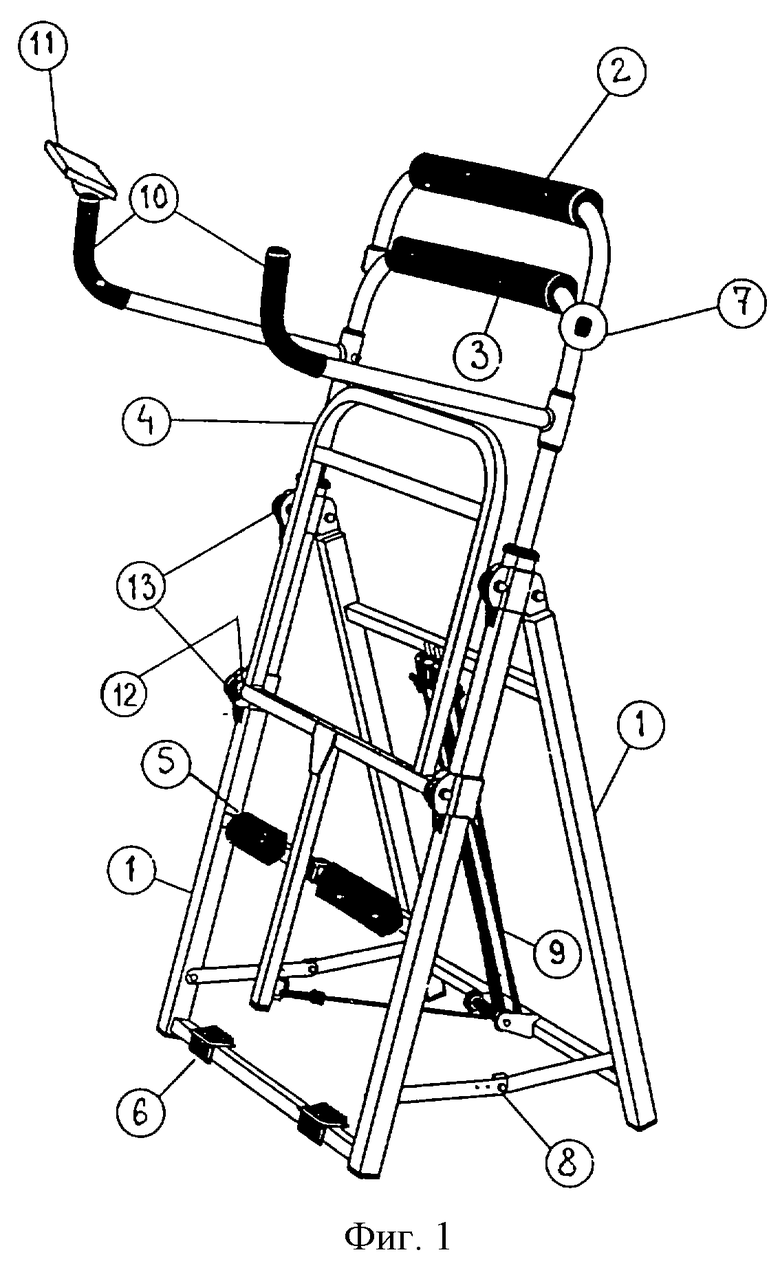
На фиг.1 представлен общий вид предлагаемого устройства для адаптации позвоночника к нагрузкам; на фиг.2 - вид сбоку; на фиг.3 - стационарное устройство, пример выполнения; на фиг.4 - то же, при наличии направляющих для подвижной опоры, пример выполнения; на фиг.5 - настенное устройство, пример выполнения; на фиг.6 - схема работы жидкокристаллического индикатора и датчика угла поворота; на фиг.7 - схема нагружения предлагаемым устройством; на фиг.8 - схема нагружения известными устройствами.
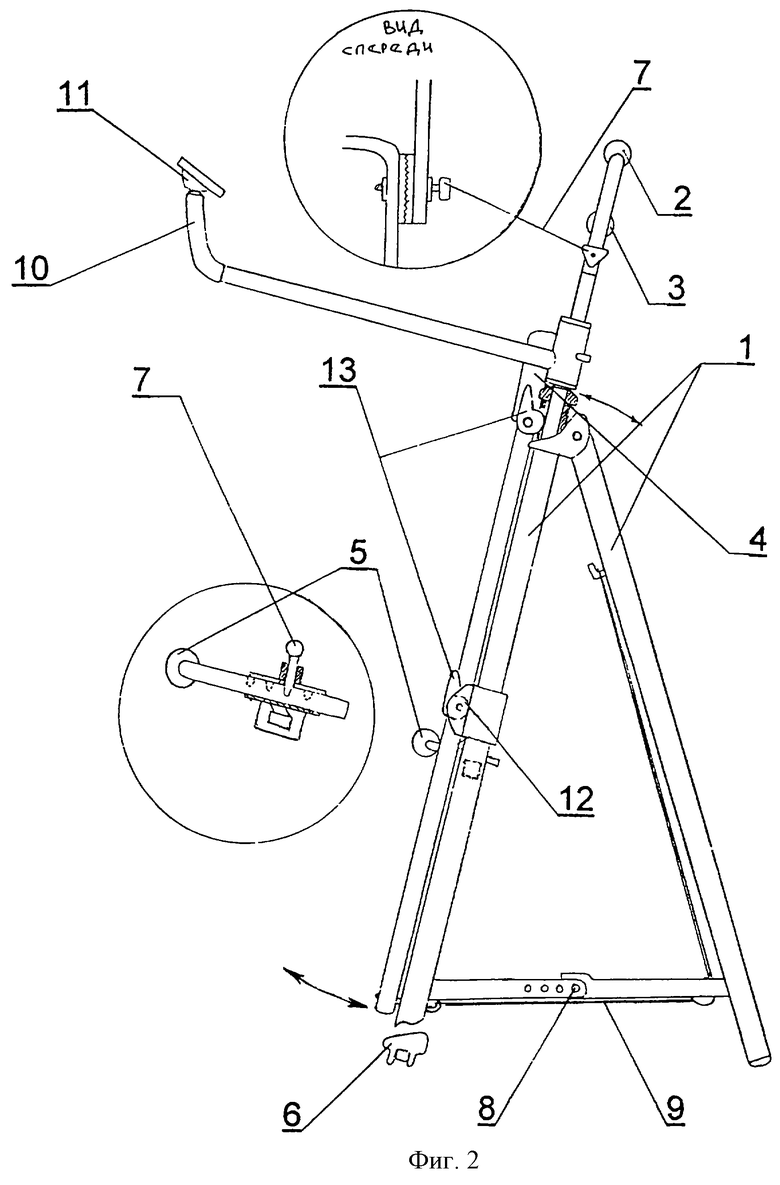
Предлагаемое устройство, изображенное на фиг.1 и 2, выполнено в виде опорной рамы 1, на которой размещены неподвижный фиксатор для грудного отдела 2; неподвижный фиксатор для пояснично-грудного отдела 3; подвижная опора для нижнепоясничного отдела позвоночника и таза 4; подколенный фиксатор 5; фиксатор для стоп 6; регулятор по горизонтали 7; регулятор угла наклона рабочей плоскости 8; нагрузочный элемент 9; рукоятки 10; жидкокристаллический индикатор 11; датчик угла поворота подвижной опоры 12; регулятор по вертикали 13. Неподвижный фиксатор для пояснично-грудного отдела 3 и фиксатор для стоп 6 образуют рабочую плоскость. Подколенный фиксатор 5 вынесен за пределы рабочей плоскости параллельно фиксаторам 3 и 6. Неподвижный фиксатор для грудного отдела 2 и подколенный фиксатор 5 являются дополнительными точками фиксации, они снабжены механизмом регулировки по горизонтали 7, что в совокупности позволяет проводить фиксацию тела человека с учетом индивидуальных особенностей. Опорная рама имеет механизм 8 изменения угла наклона рабочей плоскости от 95 до 145°. Между фиксаторами 2, 3 и фиксаторами 5, 6 установлена опора 4 с возможностью движения в плоскости, перпендикулярной рабочей, которая соединена с опорной рамой нагрузочным элементом 9. Опора 3 соединена с датчиком угла поворота 12 и жидкокристаллическим индикатором 11 с возможностью образования обратной биологической связи.
Устройство применяется следующим образом. В зависимости от состояния пациента, используя регулятор 8, выбирается угол наклона рабочей плоскости в амплитуде от 95 до 145° по отношению к горизонтальной поверхности. Опора 4 устанавливается на уровне ягодиц, упор 3 регулируется по высоте в зависимости от поставленных целей, после чего фиксаторы 2 и 5 устанавливаются с учетом индивидуальных особенностей занимающегося. Занимающийся встает пятками на фиксатор для стоп 6, упирается спиной в фиксаторы 3 и 2 и усилием рук через рукоятки 10 фиксирует заданное положение. После чего, не отрывая спины от фиксаторов 3 и 2, а колени от фиксатора 5, преодолевая сопротивление нагрузочного элемента 9, ягодицами толкает опору 4 назад, удерживает ее и возвращается в исходное положение, контролируя правильность выполнения движения на индикаторе 11 с использованием обратной биологической связи. Данное движение выполняется с учетом временных параметров по фазам нагрузки согласно рекомендациям врача, которые предварительно вносятся в индикатор 11. Для оценки исходного состояния человека и контроля эффективности занятий проводятся функциональные пробы, датчиком 12 измеряется амплитуда движения опоры 4.
В качестве примера, использующего аналогичную схему нагружения, рассмотрим построение стационарного устройства.
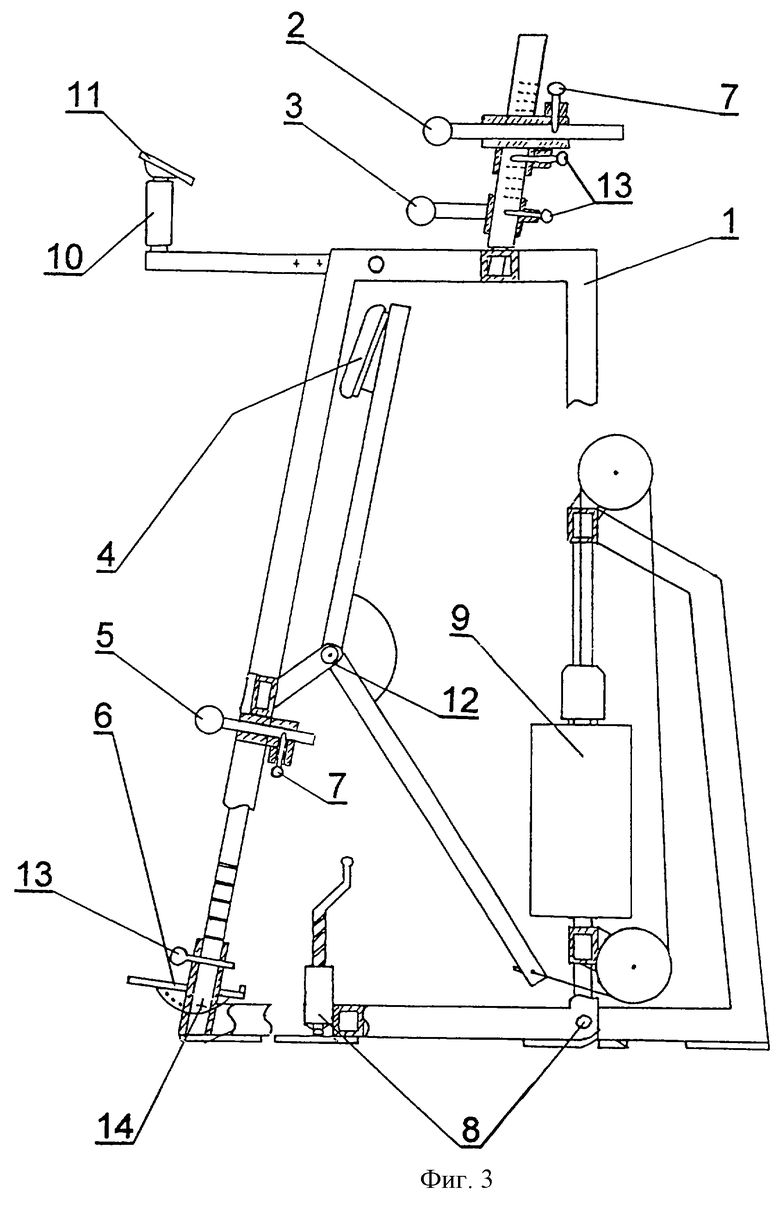
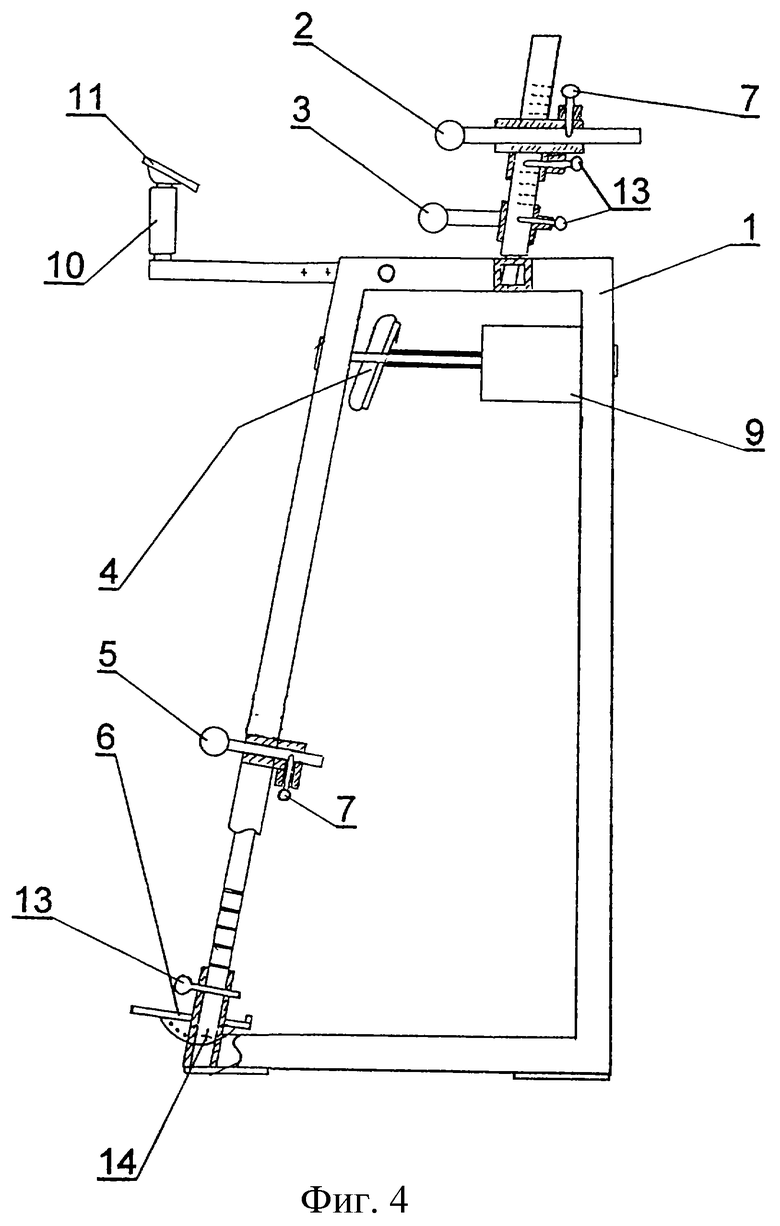
Стационарное реабилитационное устройство для адаптации позвоночника к нагрузкам состоит из опорной рамы 1, на которой установлены неподвижный фиксатор для грудного отдела 2; неподвижный фиксатор для пояснично-грудного отдела 3; подвижная опора для нижнепоясничного отдела позвоночника и таза 4; подколенный фиксатор 5; фиксатор для стоп 6; регулятор по горизонтали 7. В варианте, изображенном на фиг.3, установлены регулятор угла наклона рабочей плоскости 8 и пакет грузов 9, а в варианте, изображенном на фиг.4, - пневматический нагружатель 9. Также устройство имеет рукоятки 10; жидкокристаллический индикатор 11; датчик угла поворота 12; регулятор по вертикали 13; регулятор угла наклона фиксатора для стоп 14. Неподвижный фиксатор для пояснично-грудного отдела 3 и фиксатор для стоп 6 образуют рабочую плоскость. Подколенный фиксатор 5 вынесен за пределы рабочей плоскости параллельно фиксаторам 3 и 6. Пространственная рама выполнена с возможностью изменения угла наклона рабочей плоскости от 95 до 145°. Неподвижный фиксатор для грудного отдела 2 и подколенный фиксатор 5 являются дополнительными точками фиксации, они снабжены механизмом регулировки по горизонтали 7, что в совокупности позволяет проводить фиксацию тела человека с учетом индивидуальных особенностей. Между фиксаторами 2, 3 и фиксаторами 5, 6 установлена опора 4 с возможностью движения в плоскости, перпендикулярной рабочей, которая соединена с нагрузочным элементом 9. Опора 3 соединена с датчиком угла поворота 12 и жидкокристаллическим индикатором 11 с возможностью образования обратной биологической связи.
Устройство применяется следующим образом. Фиксатор для стоп 6 регулируют по высоте таким образом, чтобы ягодицы человека находились на уровне подвижной опоры 4. Угол наклона фиксатора 6 изменяют, используя регулятор 14. После этого фиксаторы 2, 3 и 5 устанавливаются с учетом индивидуальных особенностей занимающегося. Занимающийся встает на фиксатор для стоп 6, упирается спиной в фиксаторы 3 и 2 и усилием рук через рукоятки 10 фиксирует заданное положение. После чего, не отрывая спины от фиксаторов 3 и 2, а колени от фиксатора 5, преодолевая сопротивление нагрузочного элемента 9, толкает ягодицами опору 4 назад, удерживает ее и возвращается в исходное положение. При необходимости проведения функциональной пробы применяется соответствующий режим индикатора 11 и измеряется амплитуда движения опоры 4. В режиме занятий имеется возможность контролировать правильность выполнения движения на индикаторе 11 с использованием обратной биологической связи. Движение выполняется с учетом временных параметров по фазам нагрузки в соответствии с рекомендациями врача, которые вносятся в индикатор 11 в режиме ввода данных.
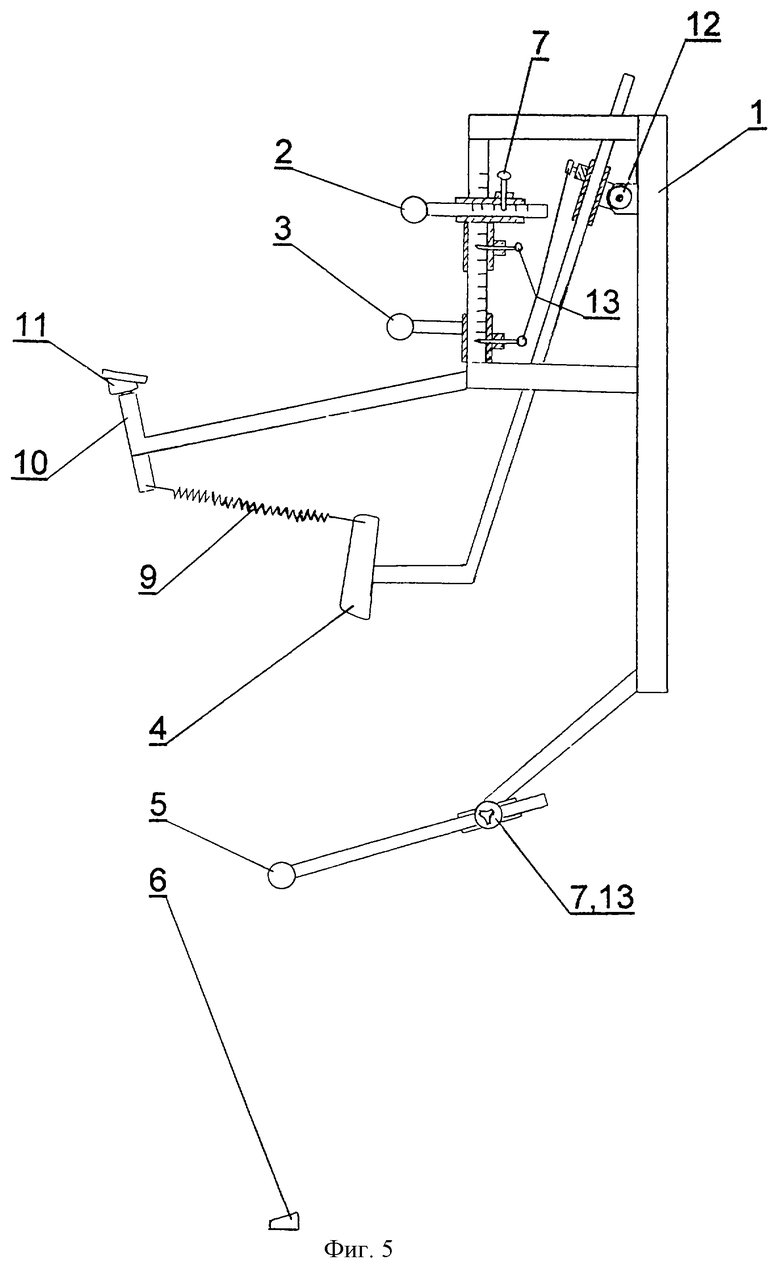
На фиг.5 показано настенное устройство. В этом случае опорная рама 1 устанавливается на стене, при этом схема нагружения сохраняется. На опорной раме располагаются неподвижный фиксатор для грудного отдела 2; неподвижный фиксатор для пояснично-грудного отдела 3; подвижная опора для нижнепоясничного отдела позвоночника и таза 4; подколенный фиксатор 5; фиксатор для стоп 6; регулятор по горизонтали 7; нагрузочный элемент 9; рукоятки 10; жидкокристаллический индикатор 11; датчик угла поворота 12; регулятор по вертикали 13.
Фиксатор для стоп 6 помещается на полу под устройством на определенном расстоянии от стены. Неподвижный фиксатор для пояснично-грудного отдела 3 и фиксатор для стоп 6 образуют рабочую плоскость. Подколенный фиксатор 5 параллельно вынесен за пределы рабочей плоскости. Неподвижный фиксатор для грудного отдела 2 и подколенный фиксатор 5 являются дополнительными точками фиксации, они снабжены механизмом регулировки по горизонтали 1, что в совокупности позволяет проводить фиксацию тела человека с учетом индивидуальных особенностей. Между фиксаторами 2, 3 и фиксаторами 5, 6 установлена опора 4 с возможностью движения в плоскости, перпендикулярной рабочей, которая соединена с опорной рамой нагрузочным элементом 9. Опора 3 соединена с датчиком угла поворота 12 и жидкокристаллическим индикатором 11. Обратная биологическая связь образуется за счет считывания пациентом показаний индикатора 11.
Строгое задание параметров положения тела человека фиксаторами 2, 3, 5, 6, обеспечивает возможность мобилизации двигательных сегментов. Наличие большого количества регулировок по вертикали и горизонтали позволяет акцентировать нагрузку на необходимом уровне позвоночника. Расположение фиксаторов 2 и 3 на небольшом расстоянии друг от друга позволяет проводить опосредованное воздействие на механизм движения шейного отдела позвоночника. Использование данных индикатора 11 и обратной биологической связи позволяет восстанавливать мышечно-связочный баланс по наиболее оптимальной схеме нагружения.
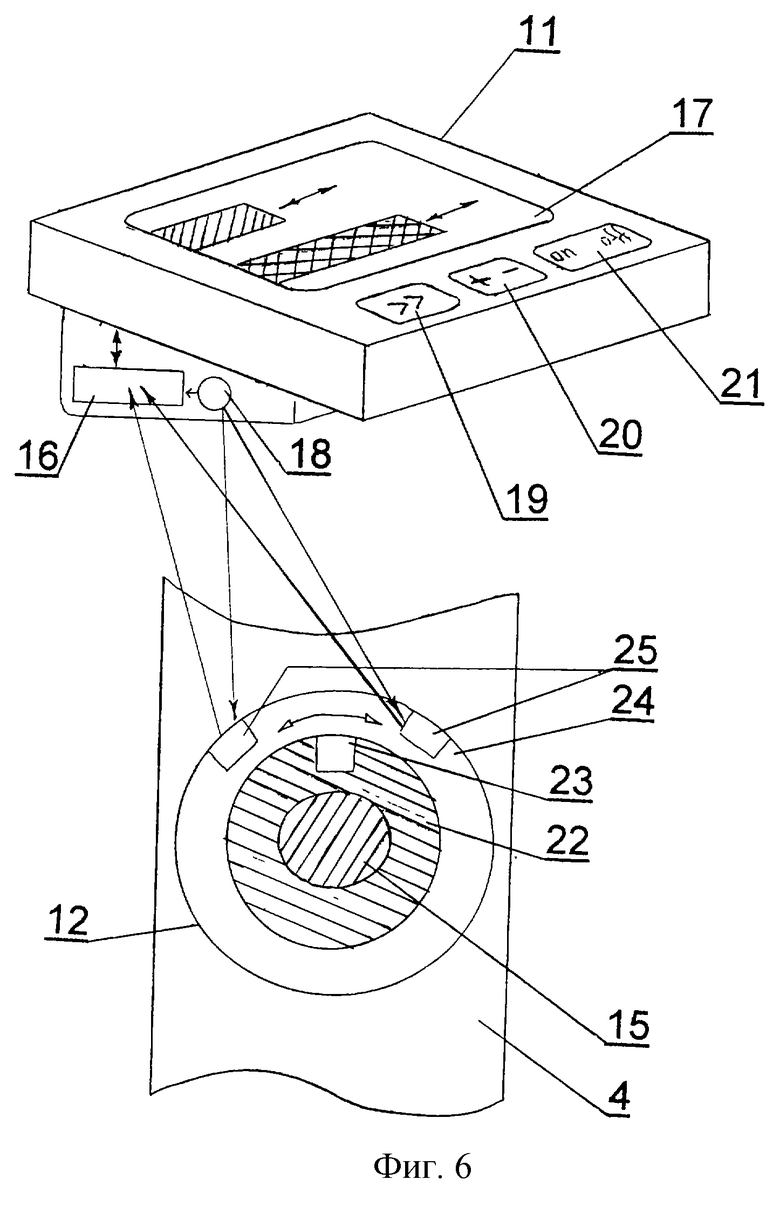
Жидкокристаллический индикатор и датчик угла поворота могут иметь различные конструктивные решения. Один из вариантов выполнения жидкокристаллического индикатора и датчика угла поворота изображен на фиг. 6. Жидкокристаллический индикатор 11 и аналоговый датчик угла поворота 12 соединены между собой проводами, которые располагаются внутри труб конструкции. Жидкокристаллический индикатор имеет микропроцессор 16, экран 17, источник питания 18, кнопку выбора режима 19, кнопку установки времени 20, кнопку включения-выключения 21. Аналоговый датчик угла поворота 12 состоит из неподвижной части 22 с магнитом 23 и подвижной части 24 с двумя магниточувствительными датчиками 25. Подвижная часть 24 прикреплена к опоре 4, а неподвижная часть 22 крепится на ось вращения 15 опоры 4. Информация о изменении угла и направления движения поступает в микропроцессор 16, где преобразуется и отображается на экране 17 в виде движущейся метки шкалы.
Используя кнопку 19, можно выбрать режим функциональной пробы, режим ввода данных и режим занятий. В режиме функциональной пробы на экране 17 в сантиметрах отображается амплитуда движения опоры 4. Применяя данный режим, возможно измерить активность двигательных сегментов позвоночника, участвующих в движении. Меняя высоту установки фиксатора 3, можно получить данные об активности различных двигательных сегментов.
На основании результатов, полученных при проведении функциональных проб и других методов диагностики, формируется программа занятий. В режиме ввода данных имеется возможность ввести в индикатор 11 должные значения амплитуды движения опоры 4 и временные параметры по фазам нагрузки. Для достижения мышечно-связочного баланса необходимо выдерживать временные параметры по фазам нагрузки, когда занимающийся толкает опору 4, удерживает ее и уступает.
В режиме занятий на экране 17 появляются две метки шкалы. Верхняя метка отображает направление и скорость движения опоры 4 в режиме реального времени. Нижняя метка шкалы показывает рекомендуемое движение по амплитуде и времени. Движение обеих меток должно совпадать. Используя обратную биологическую связь, занимающийся может корректировать движение первой метки относительно второй.
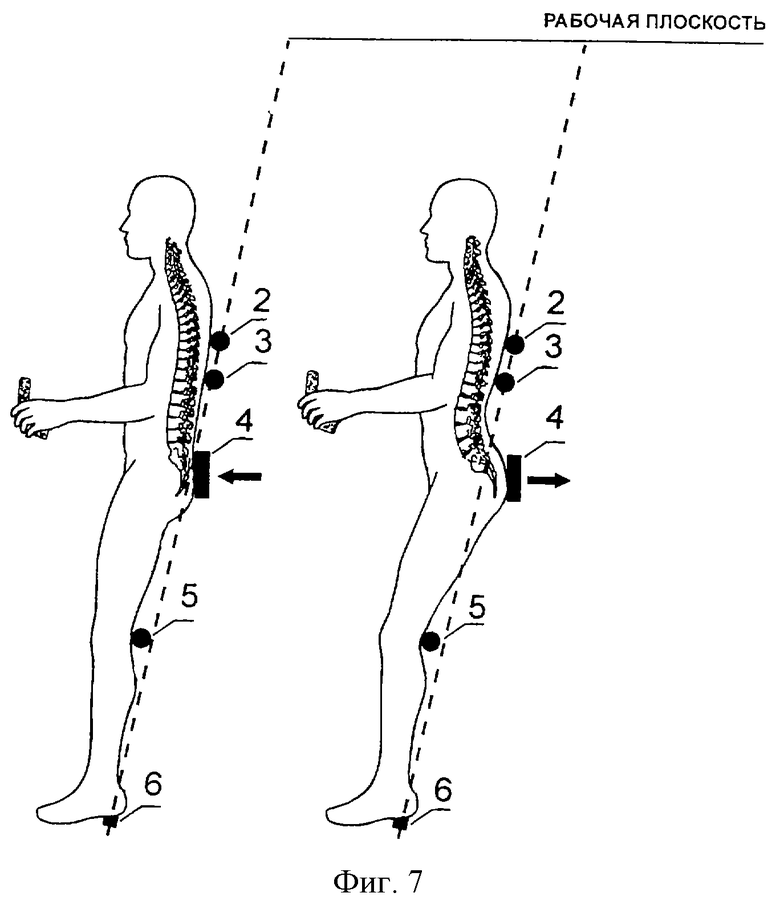
Устройство для адаптации позвоночника к нагрузкам по данному изобретению существенно отличается от аналогичных устройств. На фиг.7 изображена схема нагружения по предлагаемому устройству. Наличие четырех элементов фиксации с возможностью их регулировки по горизонтали и вертикали задает необходимое положение телу человека, что исключает ошибки при движении, позволяет осуществлять движение по полной амплитуде, акцентировать нагрузку и проводить мобилизацию на различных уровнях позвоночника. Расположение элементов 2 и 3 на небольшом расстоянии друг от друга позволяет зафиксировать несколько двигательных сегментов грудного отдела позвоночника и за счет этого активизировать содружественную работу поясничного и шейного отделов позвоночника. Возможность регулировки упоров 2 и 5 в горизонтальной плоскости обеспечивает фиксацию тела человека с учетом его индивидуальных особенностей. Вынесение фиксатора 5 за пределы рабочей плоскости обеспечивает предварительное сгибание коленей, что позволяет совершать движения позвоночника по максимальной амплитуде.
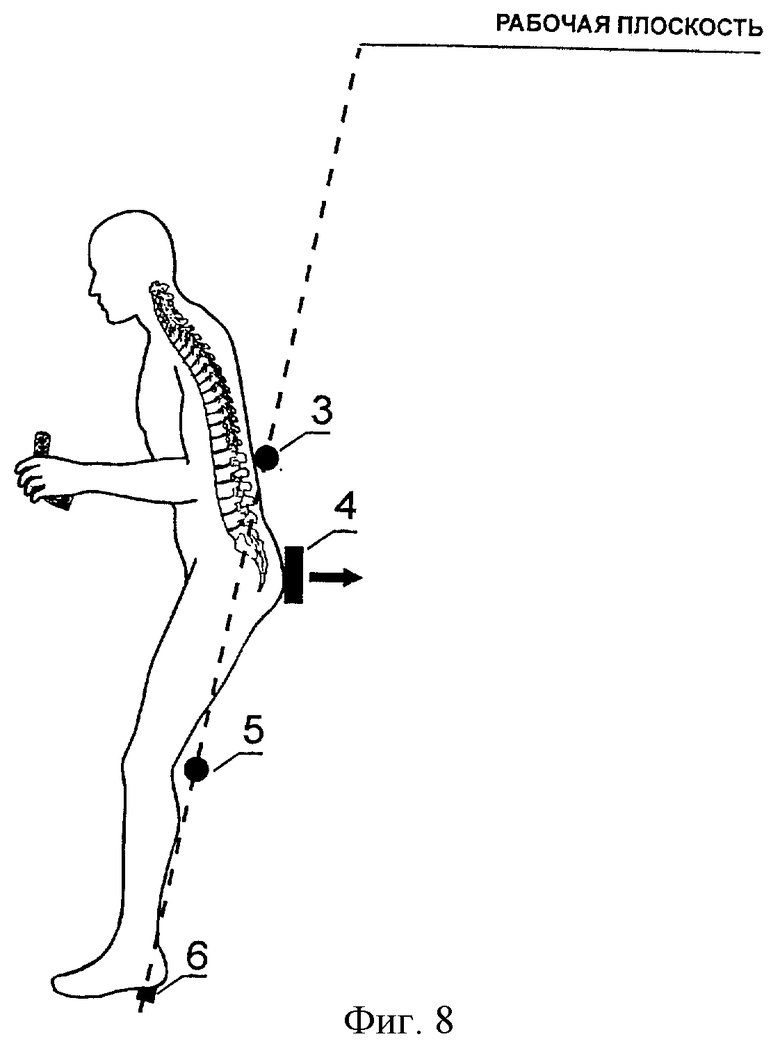
На фиг.8 изображена схема нагружения на известном устройстве. Отсутствие фиксатора 2 и расположение фиксатора 5 в пределах рабочей плоскости не исключает таких ошибок при занятиях на тренажере, как наклон вперед, что не обеспечивает движение позвоночника по полной амплитуде и не дает возможность проводить мобилизацию, а также опосредованного нагружать шейный отдел позвоночника.
Предлагаемое устройство обладает высокой эффективностью за счет предложенной конструкции, которая обеспечивает целенаправленное воздействие. Оно позволяет восстановить физиологический механизм распределения нагрузки, скорректировать осанку, сформировать новый двигательный стереотип и адаптировать позвоночник к осевой, угловой и весовой нагрузкам. Устройство может применятся в различных вариантах исполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФИЗИОЛОГИЧЕСКОГО СОСТОЯНИЯ ПОЯСНИЧНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 1998 |
|
RU2185804C2 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФИЗИОЛОГИЧЕСКОГО СОСТОЯНИЯ ПОЗВОНОЧНИКА | 2001 |
|
RU2179838C1 |
| СПОСОБ УКРЕПЛЕНИЯ МЫШЦ СПИНЫ И УСТРОЙСТВО ДЛЯ УКРЕПЛЕНИЯ МЫШЦ СПИНЫ | 1996 |
|
RU2089255C1 |
| УСТРОЙСТВО ДЛЯ ПУНКЦИИ МЕЖПОЗВОНКОВЫХ ДИСКОВ ПОЯСНИЧНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2008 |
|
RU2395262C2 |
| СТУЛ | 2007 |
|
RU2376919C2 |
| ТРЕНАЖЕР ДЛЯ УКРЕПЛЕНИЯ МЫШЦ СПИНЫ | 1997 |
|
RU2129855C1 |
| ТРАНСПОРТНО-ЛЕЧЕБНАЯ ШИНА | 2011 |
|
RU2480184C2 |
| СТУЛ | 2007 |
|
RU2376920C2 |
| Способ тракционной кинезитерапии | 2025 |
|
RU2839215C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПЕВТИЧЕСКОГО ОЗДОРОВЛЕНИЯ ЧЕЛОВЕКА | 2012 |
|
RU2519975C1 |
Изобретение относится к медицинской реабилитационной технике, оно может быть использовано для реабилитации пациентов с различной патологией позвоночника, для профилактики патологии позвоночника, а также в профессиональном спорте для достижения максимального результата. На опорной раме располагаются пять поперечных параллельных элементов, из которых два нижних (фиксаторы для стоп и подколенный) и два верхних (фиксаторы для пояснично-грудного и грудного отделов позвоночника) неподвижны. Серединный элемент (опора для нижнепоясничного отдела позвоночника и таза) может перемещаться под дозированной нагрузкой в плоскости, перпендикулярной рабочей. Подвижная опора соединена с датчиком угла поворота и жидкокристаллическим индикатором. Два верхних и два нижних элемента могут регулироваться по вертикали относительно серединного элемента, причем подколенный фиксатор и фиксатор для грудного отдела позвоночника могут дополнительно регулироваться в горизонтальной плоскости. Фиксатор для стоп и фиксатор для пояснично-грудного перехода позвоночника образуют рабочую плоскость, а подколенный фиксатор вынесен за ее пределы. Опорная рама снабжена механизмом изменения угла наклона рабочей плоскости. Технический результат заключается в обеспечении дозированного целенаправленного воздействия, что позволяет восстановить физиологический механизм распределения нагрузки, скорректировать осанку, сформировать новый двигательный стереотип, адаптировать позвоночник к осевой, угловой и весовой нагрузкам, проводить функциональные пробы. 8 ил.
Реабилитационное устройство для адаптации позвоночника к нагрузкам, содержащее опорную раму, неподвижные фиксаторы для грудного и пояснично-грудного отделов позвоночника, подколенный фиксатор и фиксатор для стоп, упоры для рук, подвижную опору для нижнепоясничного отдела позвоночника и таза, соединенную нагрузочным элементом с опорной рамой, при этом фиксатор для стоп и фиксатор для пояснично-грудного отделов позвоночника образуют рабочую плоскость, опора для нижнепоясничного отдела позвоночника и таза обладает возможностью перемещения под дозированной нагрузкой в плоскости, перпендикулярной рабочей, отличающееся тем, что опора для нижнепоясничного отдела позвоночника и таза соединена с датчиком угла поворота и жидкокристаллическим индикатором, фиксаторы прикреплены к опорной раме с возможностью регулировки по вертикали относительно опоры для нижнепоясничного отдела позвоночника и таза, причем подколенный фиксатор вынесен за пределы рабочей плоскости, а опорная рама снабжена механизмом изменения угла наклона рабочей плоскости.
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Квазиэлектронная автоматическая телефонная станция с замонтированной программой | 1975 |
|
SU559446A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 4995378 А, 26.02.1991 | |||
| СПОСОБ РАБОТЫ И КОМПРЕССИОННАЯ ХОЛОДИЛЬНАЯ МАШИНА | 2000 |
|
RU2198354C2 |
| DE 19622564 А1, 11.12.1997 | |||
| Способ формирования предварительно искаженного сигнала | 2019 |
|
RU2726184C1 |
| УСТАНОВКА ВИБРОМАНУАЛЬНОЙ ТЕРАПИИ ПОЗВОНОЧНИКА | 1992 |
|
RU2070016C1 |
| RU заявка 94031934, Б.И | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |

