Изобретение относится к области атомной энергетики, в частности к конструкциям приводов захватов машины перегрузочной ядерного реактора для управления захватом ТВС и захватом кластера, и может быть использовано в приводах, имеющих регулирующий орган, управление которым осуществляется отдельным канатным приводом.
Известна "Схема грейферной двухмоторной лебедки с планетарной передачей" [1], которая содержит замыкающий и поддерживающий барабаны, редуктор, двигатели и планетарную передачу.
Недостатками данной лебедки являются большая металлоемкость и сложность конструкции по причине наличия планетарного редуктора в отдельном корпусе.
Прототипом предлагаемого изобретения является привод захватов перегрузочного устройства для ядерного реактора по патенту Японии [2], который содержит два барабана и редуктор с двумя планетарными передачами.
Недостатком указанного привода являются его низкая надежность ввиду того, что управление захватным органом осуществляется одновременной работой двух приводов, сложность конструкции, большая металлоемкость и высокие трудозатраты при его изготовлении за счет наличия двух планетарных передач в отдельном корпусе редуктора.
Предлагаемым изобретением решается задача повышения надежности работы привода захватов машины перегрузочной, упрощения его конструкции и снижения металлоемкости.
Для достижения указанного результата в приводе захватов машины перегрузочной, содержащем барабан захвата ТВС, барабан захвата кластера и планетарную передачу, барабан захвата ТВС и барабан захвата кластера расположены на одном валу, планетарная передача, включающая центральную шестерню и сателлит с валом, размещена в полости барабана захвата кластера, причем центральная шестерня планетарной передачи установлена внутри вала, а вал сателлита планетарной передачи зафиксирован в его выступах.
Расположение барабана захвата ТВС и барабана захвата кластера на одном валу позволяет упростить конструкцию привода, сделать ее компактной и снизить металлоемкость путем размещения планетарной передачи внутри барабана захвата кластера, т.к. корпусом планетарной передачи является барабан захвата кластера. Размещение центральной шестерни внутри вала, жестко соединенного с барабаном захвата ТВС, позволяет также упростить конструкцию и снизить металлоемкость планетарной передут за счет того, что не требуется отдельного корпуса для крепления опор вала центральной шестерни. Размещение вала сателлита на выступах вала также упрощает конструкцию и снижает металлоемкость, т.к. не требуется водила планетарной передачи по причине того, что его роль выполняет вал. Кинематика привода захватов машины перегрузочной позволяет повысить надежность привода, т.к. нет необходимости в одновременной работе двух приводов, а следовательно, возможности рассогласования по причине сбоев в системе управления.
Анализ известных технических решений в исследуемой области показывает, что в приводах планетарная передача выполняется в отдельном корпусе и, соответственно, приводы имеют сложную конструкцию и высокую металлоемкость, что отражается на дополнительных затратах на изготовление корпуса.
Отличительными признаками предлагаемого привода захватов от прототипа являются: барабан захвата ТВС, барабан захвата кластера и планетарная передача расположены на одном валу, планетарная передача, включающая центральную шестерню и сателлит с валом, размещена в полости барабана захвата кластера, причем центральная шестерня планетарной передачи внутри вала, а вал сателлита планетарной передачи зафиксирован в его выступах.
Предлагаемый привод захватов машины перегрузочной иллюстрируется чертeжaми, представленными на фиг.1-3.
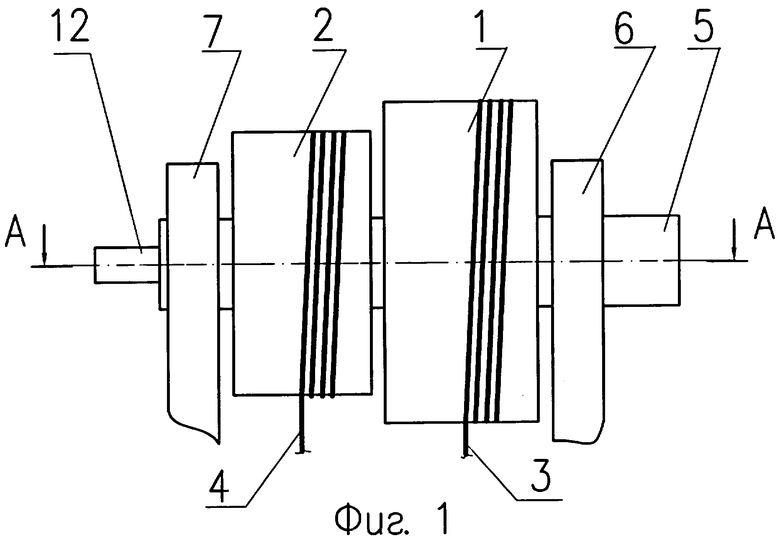
На фиг.1 показан общий вид привода захвата;
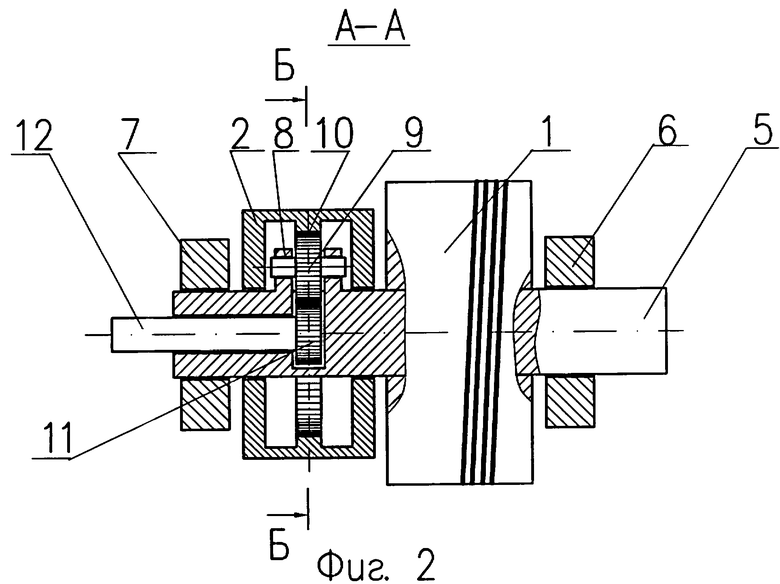
на фиг.2 показан продольный разрез привода;
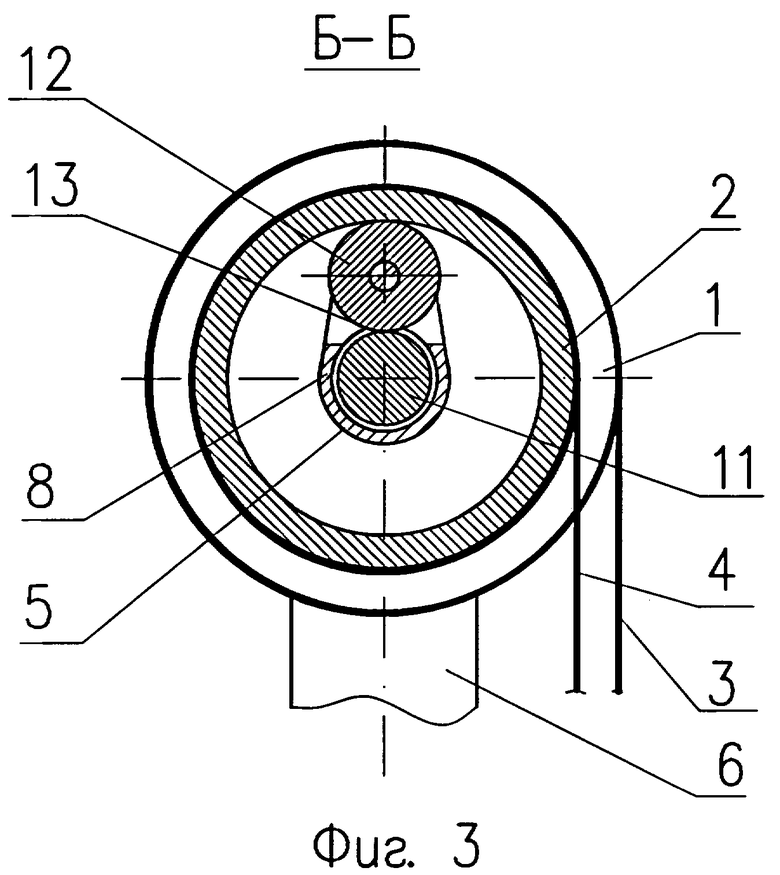
на фиг.3 показан поперечный разрез планетарной передачи.
Привод захватов машины перегрузочной содержит барабан 1 захвата ТВС, барабан 2 захвата кластера, на которые наматываются канаты 3 и 4, управляющие захватами. Барабаны 1 и 2 установлены на валу 5, причем барабан 1 - жестко, а барабан 2 - подвижно. Вал 5 установлен подвижно в опорах 6 и 7. В выступах 8 вала 5 подвижно установлен сателлит 9, находящийся в зацеплении с зубчатым венцом 10 барабана 2 и центральной шестерней 11, образуя тем планетарную передачу 13. Центральная шестерня 11 жестко соединена с валом 12, подвижно установленным внутри вала 5.
Работа привода захватов осуществляется следующим образом.
1-й режим - работа с захватом кластера, т.е. перемещение захвата кластера относительно неподвижного захвата ТВС: работает привод захвата кластера. Вращается вал 12, вал 5 заторможен. Барабан 1 неподвижен. Вращение вала 12 через центральную шестерню 11 передается сателлиту 9. Вращение сателлита передается на зубчатый венец 10, приводя во вращение барабан 2 и наматывая на него или сматывая с него канат 4, связанный с захватом кластера.
2-й режим - работа с захватом ТВС, т.е. синхронное перемещение захвата ТВС и захвата кластера: работает привод подъема захвата ТВС. Вращается вал 5, вал 12 заторможен. Вал 5 перелает вращение барабану 1 и сателлиту 9, который, обегая неподвижную шестерню 11 и взаимодействуя с зубчатым венцом 10, передает вращение барабану 2. Канаты 3 и 4 наматываются на барабаны 1 и 2 или сматываются с них, обеспечивая перемещение связанных с ними захвата ТВС и захвата кластера соответственно.
Планетарная передача 13 выполняет роль синхронизирующего механизма, исключающего проскальзывания барабана захвата кластера относительно барабана привода ТВС. В конструкции привода диаметры барабанов выбраны на основании кинематических расчетов, исходя из равенства линейных скоростей канатов 3 и 4.
Использование предлагаемого изобретения позволяет повысить надежность привода, упростить его конструкцию и снизить металлоемкость.
Источники информации
1. Справочник по кранам /Под общей редакцией проф. М. Гохберга, 1988, стр.393, рис.VI 2.20 “Схема грейферной двухмоторной лебедки с планетарной передачей”.
2. Патент Японии № 52-22076, кл. G 21 C 19/10, oпубл. 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ ЛЕБЕДКА | 1994 |
|
RU2081053C1 |
| ГРУЗОВАЯ ЛЕБЕДКА | 1996 |
|
RU2096309C1 |
| РУЧНАЯ ЛЕБЕДКА | 1991 |
|
RU2083476C1 |
| МОБИЛЬНАЯ ЛЕБЕДКА | 2014 |
|
RU2552785C1 |
| Устройство для вибровращательного бурения | 1982 |
|
SU1078018A1 |
| ПРИВОД ПОДЪЕМА КОВША КАРЬЕРНОГО ЭКСКАВАТОРА | 2016 |
|
RU2654443C1 |
| ТЯГОВО-ТОРМОЗНАЯ ЛЕБЕДКА ДЛЯ УСТАНОВКИ КОНТАКТНОГО ПРОВОДА ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2205786C1 |
| Двухбарабанная лебедка привода ковша экскаватора-драглайна | 1985 |
|
SU1372017A1 |
| ТЯГОВАЯ ЛЕБЕДКА | 2002 |
|
RU2225350C2 |
| ЛЕБЕДКА АВТОМОБИЛЬНАЯ | 2012 |
|
RU2544450C2 |
Изобретение относится к области атомной энергетики, в частности к конструкциям приводов захватов машины перегрузочной ядерного реактора для управления захватом ТВС и захватом кластера, и может быть использовано в приводах, имеющих регулирующий орган, управление которым осуществляется отдельным канатным приводом. Привод захватов машины перегрузочной содержит барабан захвата ТВС, барабан захвата кластера и планетарную передачу. Барабан захвата ТВС и барабан захвата кластера расположены на одном валу, планетарная передача, включающая центральную шестерню и сателлит с валом, размещена в полости барабана захвата кластера, причем центральная шестерня планетарной передачи установлена внутри вала, а вал сателлита планетарной передачи зафиксирован в его выступах. Использование предлагаемого изобретения позволяет повысить надежность привода, упростить его конструкцию и снизить металлоемкость. 3 ил.
Привод захватов машины перегрузочной, содержащий барабан захвата ТВС, барабан захвата кластера и планетарную передачу, отличающийся тем, что барабан захвата ТВС и барабан захвата кластера расположены на одном валу, планетарная передача, включающая центральную шестерню и сателлит с валом, размещена в полости барабана захвата кластера, причем центральная шестерня планетарной передачи установлена внутри вала, а вал сателлита планетарной передачи зафиксирован в его выступах.
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |

