Изобретение относится к области совершенствования способов поиска наземных и надводных объектов с целью топогеодезического, метеорологического и других видов обеспечения боевого применения управляемых авиационных средств поражения (УАСП).
Наиболее близким по технической сущности к заявленному способу (прототипом) является способ скоростной воздушной разведки [см. патент РФ на изобретение №2395782, МПК кл. F41H 13/00, опубликованный 27.07.2010 г.] Суть данного способа разведки заключается в том, что приборы, осуществляющие воздушную разведку (системы фотографирования поверхности земли, системы, передающие полученные фотоизображения на принимающие компьютеры, устройства спутникового позиционирования, устройства распознавания наземных объектов), устанавливаются в снаряде (в том числе реактивном) или ракете, а система фотографирования применяется с возможностью высокоскоростной съемки. Снаряд-разведчик запускается (выстреливается) из артиллерийского орудия либо из ракетной или иной пусковой установки. Принимающий компьютер трансформирует снимки земной поверхности в панорамное изображение поверхности земли на всей траектории полета снаряда. Попавшие в кадры объекты с помощью специальных программ распознаются по классам, их местоположение определяется с помощью системы спутникового позиционирования.
Недостатками прототипа являются:
- использование пусковых устройств различного типа (пусковых установок и артиллерийских орудий), что является демаскирующими признаками;
- возможность использования фотоизображений для обеспечения пусков (сбросов) УАСП крайне мала, так как траектории снарядов-разведчиков, на которых стоят средства фотографирования, обладают низкой высотой траектории, что не обеспечивает нужной информативности получаемых данным способом разведданных;
- использование в составе комплекса средств, обеспечивающих работоспособность данного способа, входят устройства спутникового позиционирования, которые, вероятнее всего, будут работать нестабильно во время ведения противоборствующими сторонами боевых действий, что приведет к получению недостоверной информации таким способом;
- передача фотоизображений земной поверхности и наземных целей осуществляется по специальной линии передачи данных, что в условиях современной войны и информационного противодействия противника, является крайне нежелательным вариантом;
- данный способ разведки имеет малую производительность и в случаях ведения крупномасштабных боевых действий создает предпосылки к большому расходу снарядов-разведчиков.
Существует еще один известный способ оптической разведки телетепловизионным прицелом пусковой установки ракетного комплекса [см. патент РФ на изобретение №2564807, МПК кл. F41G 7/00, опубликованный 10.10.2015 г.]. Разведка осуществляется с помощью телетепловизионного прицела пусковой установки ракетного комплекса. Оператор задает правую и левую границы сектора поиска относительно пусковой установки ракетного комплекса, двух координатную траекторию поиска и скорость движения прицела в горизонтальном и вертикальном направлениях. Перевод поиска и обнаружения цели в автоматический режим производится по команде оператора с пульта управления. Поиск ведут автоматическим сканированием в заданном секторе путем подачи управляющих команд с пульта управления на приводы вертикального и горизонтального наведения пусковой установки в соответствии с заданной двухкоординатной траекторией и заданными скоростями поиска. Обнаружение цели осуществляется по появлению образа цели на автоматизированное сопровождение автоматическое сканирование отключают. Выбранная цель удерживается в перекрестии телетепловизионного прицела с помощью автомата сопровождения. Оператор совершает пуск ракеты, которая автоматически наводится на сопровождаемую телетепловизионным прицелом цель.
Недостатками данного способа являются:
- поиск цели осуществляется автоматизированным прицелом, что при использовании на авиационной технике (самолете-носителе) будет значительно отвлекать экипаж от самолетовождения;
- для работы автоматизированного прицела необходимо задавать границы поиска цели.
Известен способ воздушной разведки наземных объектов с использованием беспилотного летательного аппарата (БпЛА) [см. патент РФ на изобретение №2229676, МПК кл. F41H 13/00], который состоит в том, что предварительно на БпЛА устанавливают полезную нагрузку (телевизионную камеру, инфракрасную систему, радиолокационную станцию), радиоаппаратуру линии передачи данных, навигационную систему, двигательную установку и автопилот с системой измерений углов крена и тангажа. По прибытии БпЛА в район разведки с помощью полезной нагрузки получают на БпЛА соответствующее отображение (телевизионное, инфракрасное, радиолокационное) наземных объектов на фоне земной поверхности, с помощью навигационной системы определяют значения координат местоположения БпЛА, а с помощью системы измерений углов крена и тангажа измеряют значения углов крена и тангажа. Через радиоаппаратуру линии передачи данных передают с БпЛА на наземный пункт сигналы, соответствующие этому изображению, координаты местоположения, углы крена и тангажа, принимают их на наземном пункте, где преобразуют эти сигналы в видимое изображение наземных объектов на фоне земной поверхности, на видимом изображении обнаруживают наземные объекты и опознают их как наземные объекты определенного класса, и с использованием видимого изображения, координат местоположения, углов крена и тангажа определяют координаты местоположения обнаруженных наземных объектов.
Недостатки способа:
- низкая скорость воздушной разведки (до 120 км/ч);
- подверженность воздействию средствами радиоэлектронного подавления противника линии передачи данных;
- низкая скрытность воздушной разведки (например, акустический шум от работы двигательной установки);.
- уязвимость самого БпЛА от стрелкового вооружения и от средств ПВО противника (малая скрытность самого БпЛА, скорость полета около 120 км/ч, высоты полета от 100 до 3500 метров);
- малая площадь района разведки (не более 50 км2).
Техническим результатом предлагаемого изобретения является:
- достижение вероятности обнаружения и распознавания, вскрытых в процессе воздушной разведки объектов, не менее 0,9;
- сокращение времени поиска объекта и увеличение площади района поиска (до 100 км2) в следствие больших скоростей (до 1000 км/ч) и высот полета (от 3500 м) носителя УАСП;
- получение координат объекта с погрешностью определения координат не хуже 8 метров днем и ночью в простых и ограниченно сложных метеоусловиях.
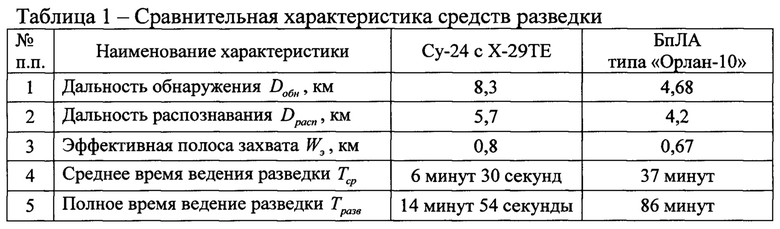
Сущность изобретения заключается в том, что в качестве средства воздушной разведки применяется тепловизионная, телевизионная или комбинированная головка самонаведения (ГСН) УАСП, подвешенных на летательный аппарат - носитель УАСП, фиг. 1.
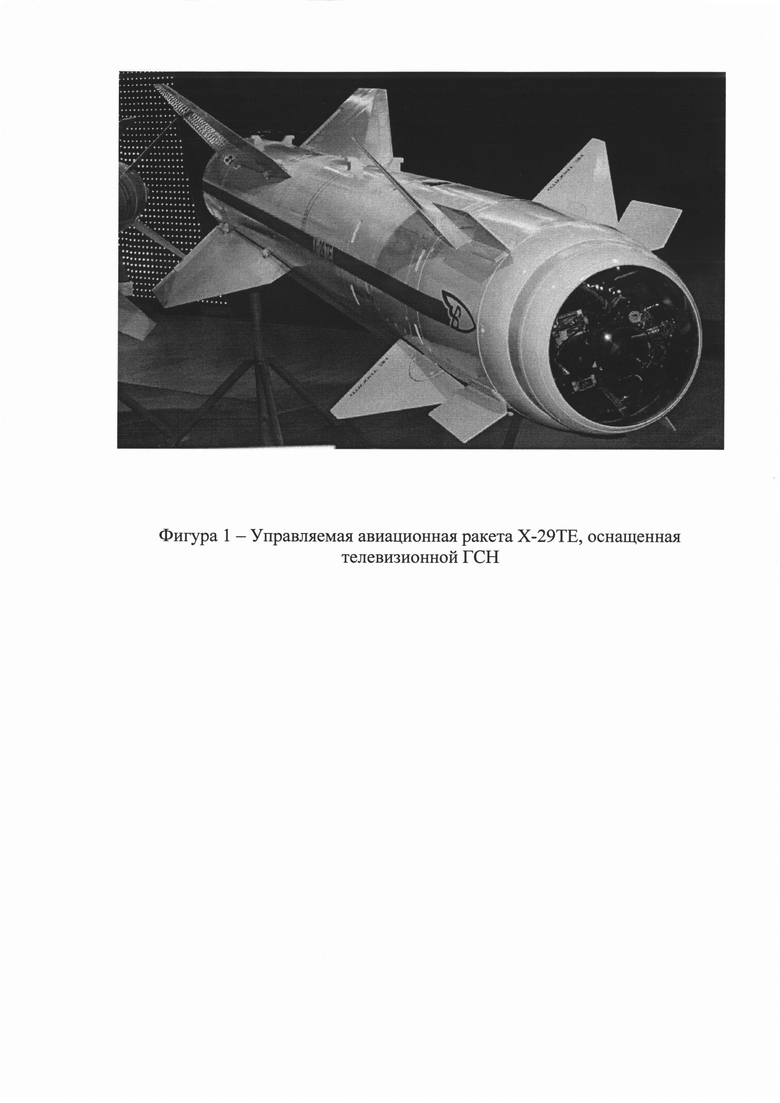
В свою очередь, оптико-электронная камера ГСН позволяет получить изображение земной поверхности с расположенными на ней объектами (в видимом и инфракрасном диапазонах длин волн электромагнитного спектра) и вывести его на экран многофункционального индикатора (МФИ) в кабине экипажа летательного аппарата, фиг. 2.
С помощью системы видеорегистрации (СВР) производиться запись информации с МФИ, которая храниться на съемном носителе.
Определение координат объектов производиться с помощью навигационной системы летательного аппарата (ЛА) и УАСП, наложением прицельной марки на объект и ввода оперативной цели в бортовую цифровую вычислительную машину (БЦВМ) ЛА.
Способ оптической разведки с помощью оптико-электронных головок самонаведения УАСП заключается в следующем.
Оператор вооружения на борту носителя ведет разведку объектов с помощью оптико-электронной ГСН УАСП, перемещает поле зрения в заданном секторе разведки, применяя органы управления ГСН. На монитор МФИ оператора вооружения поступает видеоизображение с оптико-электронной ГСН УАСП. Оператор изучает изображение, поступающее от ГСН, обнаруживает объект, накладывает на него прицельную марку, включает режим автосопровождения цели ГСН. Информацию об объекте, характере его состояния (движется, находится на позиции) и координаты объекта оператор передает по линии передачи данных соответствующим командирам или на пункты управления.
Данный способ включает в себя следующие этапы:
1. Своевременное включение ГСН УАСП до подхода в район разведки.
2. Выход носителя (самолет, вертолет, БпЛА) УАСП в район ведения воздушной разведки в пределах которого, находится объект. При этом УАСП должно быть своевременно включено (выход в дежурный режим).
3. Оператор выбирает режим работы системы управления оружием носителя с ГСН УАСП, находящейся на соответствующей точке подвески. Далее выводит изображение поля зрения ГСН на многофункциональный индикатор (МФИ).
4. На получаемом от ГСН изображении оператор выполняет поиск объекта путем перемещения координатора цели из состава ГСН в вертикальной и горизонтальной плоскостях.
5. После обнаружения объекта и его распознавания оператор активирует режим автосопровождения цели нажатием кнопки «ПРИВЯЗКА». После нажатия данной кнопки на МФИ отображаются координаты, скорость и наклонная дальность до цели.
6. Полученную информацию о цели экипаж использует в интересах боевого применения АСП, либо передает ее соответствующим командирам и пунктам управления.
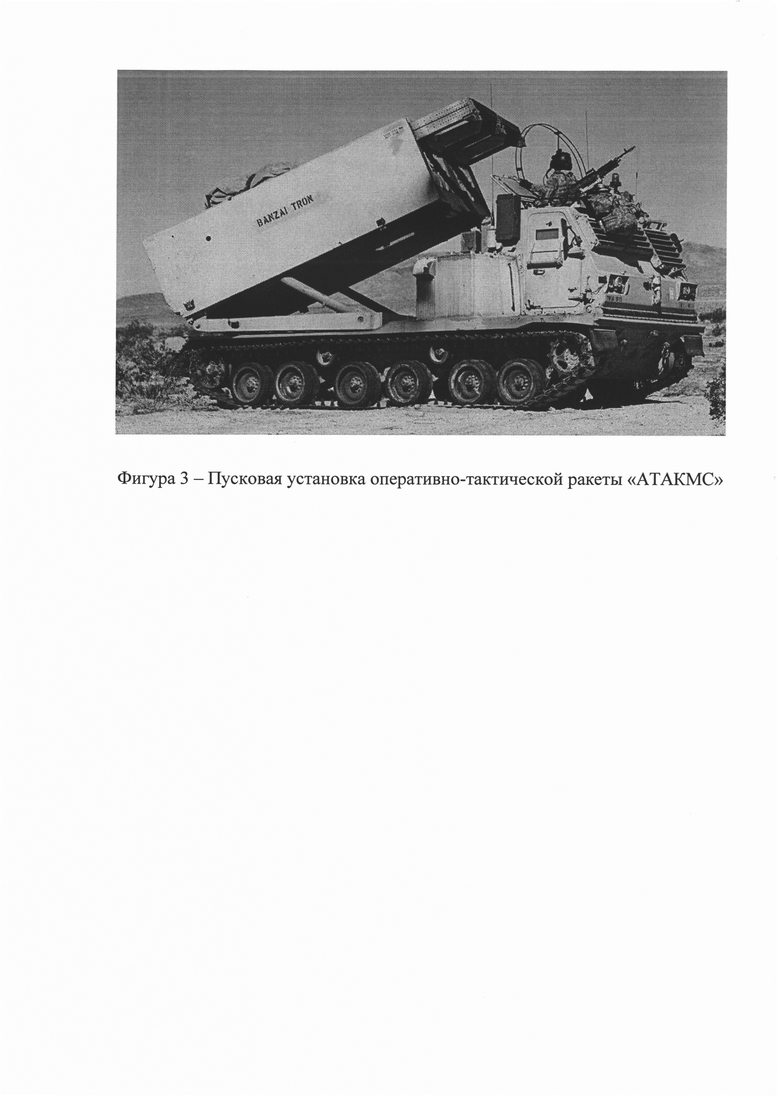
Для оценки эффективности предлагаемого способа использовались следующие показатели:
- дальность обнаружения ГСН УАСП цели типа пусковая установка оперативно-тактической ракеты с заданной вероятностью - Dобн;
- дальность распознавания ГСН УАСП цели типа пусковая установка оперативно-тактической ракеты - Dрacп;
- эффективная ширина полосы обследования - Wэ;
- среднее время поиска до обнаружения цели - Тср;
- полное время разведки цели - Тразв.
Для расчета дальности распознавания ГСН УАСП цели типа пусковая установка оперативно-тактической ракеты будет использоваться формула [см. Горбунов В.А. Эффективность обнаружения целей. М.: Воениздат, 1979. 160 с.]:

где Робн - вероятность обнаружения ГСН УАСП цели типа пусковая установка оперативно-тактической ракеты, рассчитана по формуле [см. Живичин А.Н., Соколов B.C. Дешифрирование фотографических выражений. М.: Недра, 1980. 253 с.]:

где L - размер объекта, А - разрешающая способность ГСН,
В - коэффициент, учитывающий форму объекта.
Под эффективной полосой захвата Wэ, понимается вся или часть
данной полосы поперечного захвата местности ГСН УАСП, в пределах которой детальность изображения объекта позволяет получить о нем требуемые данные.
Для расчета эффективной полосы захвата будет использоваться формула [см. Горбунов В.А. Эффективность обнаружения целей. М.: Воениздат, 1979. 160 с.]:

где Рз - заданная вероятность распознавания цели.
Для расчета среднего времени поиска до обнаружения цели будет использоваться формула [см., например, Кириллов В.И., Грошев В.Н. Теория боевой эффективности. Монино: ВВА, 1969. 276 с.]:

где В - ширина района разведки, L - глубина района разведки, Vла - скорость летательного аппарата.
Для расчета полного времени разведки цели будет использоваться формула [см. Кириллов В.И., Грошев В.Н. Теория боевой эффективности. Монино: ВВА, 1969. 276 с.]:

где Рразв - заданная вероятность разведки цели.
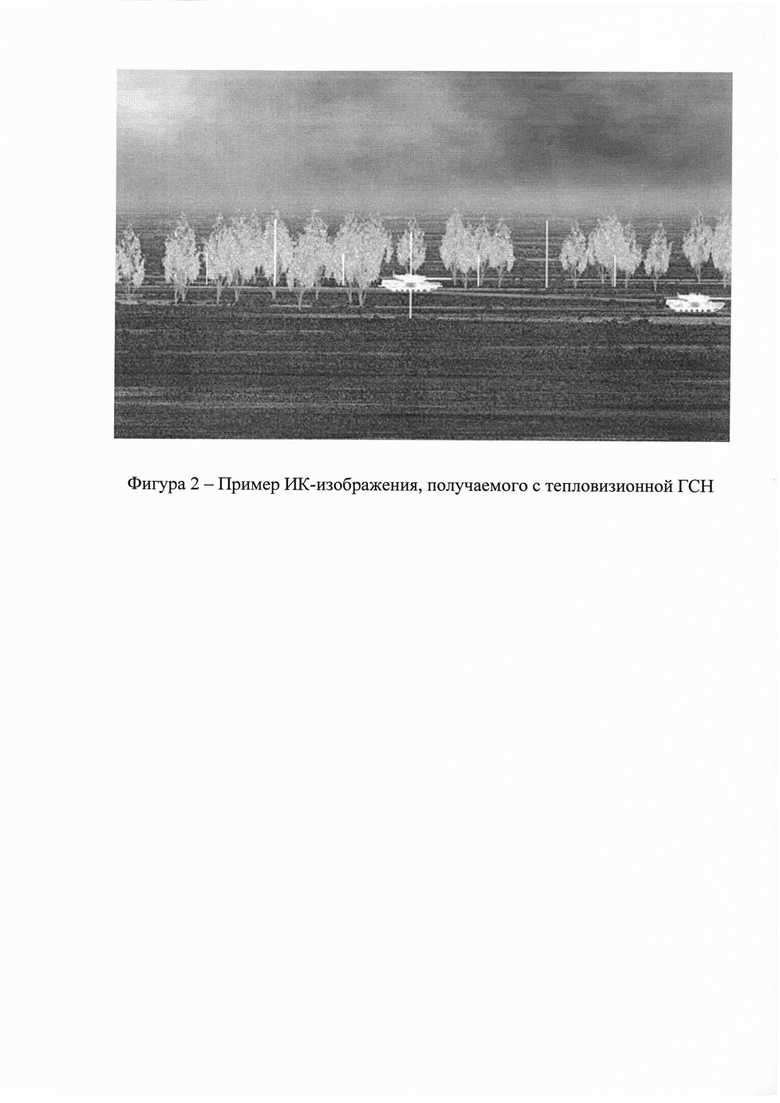
За типовую цель для разведки примем пусковую установку оперативно-тактической ракеты типа «АТАКМС». OTP предназначена для поражения стационарных и полевых командных пунктов, позиций ЗРК, вертолетных площадок и аэродромов, механизированных и бронетанковых подразделений в обороне и на марше. ПУ размещается на БМП типа M113, фиг. 3.
Размер цели составляет: длина не превышает 6 метров, ширина - до 3 метров, высота - около 3 метров, максимальная скорость - 30-33 км/ч. Цель размещается в пределах района 10×10 км.
Для определения эффективности предлагаемого способа по критериям, приведенным выше, вычислялись характеристики поиска цели в районе разведки, представлены в таблице 1.
Предлагаемый способ является эффективным способом ведения разведки с ЛА, так как управляемое авиационное средство поражения с ГСН можно разместить на носителе без специализированных средств разведки.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы УАСП и их носители (самолеты, вертолеты), состоящие на вооружении без проведения дополнительных технических доработок.
Источники информации
1. Патент РФ на изобретение №2395782, МПК кл. F41H 13/00, опубликованный 27.07.2010 г.
2. Патент РФ на изобретение №2564807, МПК кл. F41G 7/00, опубликованный 10.10.2015 г.
3. Патент РФ на изобретение №2229676, МПК кл. F41H 13/00.
4. Горбунов В.А. Эффективность обнаружения целей. М.: Воениздат, 1979. 160 с.
5. Живичин А.Н., Соколов B.C. Дешифрирование фотографических выражений. М.: Недра, 1980. 253 с.
6. Кириллов В.И., Грошев В.Н. Теория боевой эффективности. Монино: ВВА, 1969. 276 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОКОРАБЕЛЬНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2771076C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ЦЕЛИ ДЛЯ ОБЕСПЕЧЕНИЯ ПРИМЕНЕНИЯ ТАКТИЧЕСКИХ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИКО-ЭЛЕКТРОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2021 |
|
RU2776005C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| УЧЕБНЫЙ ИМИТАТОР БОЕВОГО СРЕДСТВА | 2021 |
|
RU2773419C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| СПОСОБ КОМПЛЕКСНОГО ПРИМЕНЕНИЯ ЗЕНИТНО-РАКЕТНОГО ВООРУЖЕНИЯ СО СРЕДСТВАМИ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ | 2023 |
|
RU2830505C1 |
Изобретение относится к с способу воздушной разведки наземных и надводных объектов оптико-электронными головками самонаведения (ГСН) управляемых авиационных средств поражения. Для проведения воздушной разведки наземных и надводных объектов подвешивают на летательный аппарат (носитель) управляемые авиационные средства поражения (УАСП) с оптико-электронными ГСН, производят выбор с помощью оператора режима работы системы управления оружием и выводят изображение поля зрения ГСН на многофункциональный индикатор, выполняют поиск объекта путем перемещения координатора цели на получаемом от ГСН изображении, после обнаружения объекта и его распознавания активируют режим автосопровождения, используют полученную информацию в интересах боевого применения или передают на соответствующие пункты управления. Обеспечивается повышение эффективности ведения разведки наземных и надводных объектов. 1 табл., 3 ил.
Способ воздушной разведки наземных и надводных объектов оптико-электронными головками самонаведения управляемых авиационных средств поражения для топогеодезического, метеорологического и информационного обеспечения их боевого применения, включающий в себя следующие этапы:
- подвеска на носитель управляемых авиационных средств поражения (УАСП), оснащенных оптико-электронными головками самонаведения (ГСН);
- своевременное включение ГСН УАСП до подхода в район разведки;
- выход носителя (самолет, вертолет, беспилотный летательный аппарат) УАСП в район ведения воздушной разведки, в пределах которого находится объект;
- выбор оператором режима работы системы управления оружием носителя с ГСН УАСП, находящейся на соответствующей точке подвески, и вывод изображения поля зрения ГСН на многофункциональный индикатор (МФИ);
- выполнение поиска объекта оператором на получаемом от ГСН изображении путем перемещения координатора цели из состава ГСН в вертикальной и горизонтальной плоскостях;
- после обнаружения объекта и его распознавания оператор активирует режим автосопровождения цели нажатием кнопки «ПРИВЯЗКА», при этом на МФИ отображаются координаты, скорость и наклонная дальность до цели;
- полученную информацию о цели экипаж использует в интересах боевого применения АСП либо передает ее соответствующим командирам или на пункты управления.
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2690142C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| JP 2004211992 A, 29.07.2004 | |||
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВЕРТОЛЕТА | 2009 |
|
RU2403181C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |

