Настоящее изобретение относится к судну-трубоукладчику и способу прокладки трубопровода.
Технология прокладки трубопроводов в море, главным образом используемая до настоящего времени, известна как "укладка в форме буквы "S" (типа "S") или "S-укладка". Вкратце эта технология может быть описана следующим образом. Секции труб, обычно 12-метровой длины, доставляются из порта на баржу-трубоукладчик посредством транспортных барж или транспортных судов и выгружаются на палубу баржи-трубоукладчика. Эти секции труб укладываются одна за другой вдоль монтажной платформы, которая обычно расположена горизонтально, либо в некоторых случаях имеет небольшой наклон в 5-10° (эта платформа называется площадкой наращивания трубопровода). Для создания непрерывного трубопровода на площадке наращивания на нескольких рабочих площадках выполняются операции, необходимые для завершения соединения секций труб. Когда добавляется новая секция, баржа двигается вперед и трубопровод, поддерживаемый на корме баржи-трубоукладчика наклонной спусковой аппарелью (или плавучим стингером), изгибается вокруг кормы вниз к морскому дну. Профиль трубопровода, от судна-трубоукладчика до морского дна, имеет форму длинной буквы "S" (откуда и происходит термин "S-укладка" или "укладка трубопровода S-формой"). Верхняя часть профиля называется "перегиб", а нижняя часть называется "прогиб". Для уменьшения возникающих в висящей части трубопровода напряжений на его протяжении от судна-трубоукладчика до дна в трубопроводе создается постоянное натяжение с помощью натяжных устройств. Существует ограничение глубины прокладки, до которой можно использовать этот способ. По мере увеличения глубины тяговое усилие, развиваемое натяжным устройством, необходимое для поддержания на приемлемом уровне натяжения трубопровода, быстро нарастает и, соответственно, возрастает обратное тянущее усилие, действующее по горизонтали со стороны трубопровода на судно-трубоукладчик. Упомянутые усилия могут быть сокращены путем увеличения угла спуска трубопровода в воду. Если угол близок к вертикальному (называется "J-укладка" или "укладка трубопровода J-формой"), величина необходимого натяжения трубопровода очень близка к весу участка трубопровода, длина которого равна глубине, а горизонтальная составляющая натяжения близка к нулю. Этому способу, напротив, присущи ограничения, заключающиеся в наличии минимальной глубины применения, поскольку для изгиба трубопровода на 90° при его укладке на морское дно требуется достаточно места, а при чрезмерно крутом изгибе трубопровода напряжения в нем превысят допускаемые.
В патенте DE 2118360 описано судно-трубоукладчик (понтон) с вытянутой вверх вышкой. Вышка установлена на понтоне с возможностью наклона относительно жестко закрепленной оси. Угол наклона вышки регулируется посредством лебедки. При наращивании трубопровода присоединяемую секцию трубопровода, закрепленную на подъемной опоре, поднимают и устанавливают в линию с прокладываемым трубопроводом, фиксируют в этом положении посредством захватных элементов и приваривают к торцу прокладываемого трубопровода, который в этой время зафиксирован относительно вышки посредством захватного устройства.
В патенте ЕР 0661488 (ближайший аналог изобретения) описано судно-трубоукладчик, содержащее узел расположенной вытянутой вверх вышки (для J-укладки), определяющий трассу трубопровода при его прокладке, и нижнее направляющее устройство направления трубопровода после прохождения им вышки. Недостатком этого технического решения является отсутствие средств контроля изгиба трубопровода при прохождении через нижнее направляющее.
Опасность создания в трубопроводе чрезмерных напряжений, особенно в тех случаях, когда гибкость его относительно невысока, при J-укладке ограничивает сферу применения этого способа и, в частности, условия, при которых этот способ может считаться подходящим.
Задачей изобретения является создание судна-трубоукладчика и способа прокладки трубопровода, обеспечивающих решение проблемы возникновения в трубопроводе чрезмерных напряжений при J-укладке, что позволит более эффективно использовать J-укладку в самых разных условиях.
В соответствии с изобретением предлагается судно-трубоукладчик, содержащее узел расположенной вытянутой вверх вышки (башни), определяющий трассу трубопровода при его прокладке, и нижнее направляющее устройство направления трубопровода после прохождения им вышки, которое содержит несколько групп направляющих роликов, расположенных разнесенными друг от друга вдоль трассы трубопровода и ограничивающих боковые пределы названной трассы, при этом направляющие ролики расположены с возможностью некоторого изгиба трубопровода при его прохождении через нижнее направляющее устройство, а само судно снабжено средствами контроля сил, воздействующих на трубопровод со стороны роликов нижнего направляющего устройства.
Допуская изгиб трубопровода в процессе его спуска с судна и регулируя этот изгиб, направляющие ролики снижают вероятность перегрузки трубопровода при выводе его из судна. Это также дает возможность распределить горизонтальные силы, воздействующие на трубопровод со стороны судна при прокладке, по разным группам направляющих роликов, благодаря чему напряжения, создаваемые на одной отдельной группе направляющих роликов, уменьшаются.
Обычно предпочтительной формой направляющих роликов является цилиндрическая, однако при необходимости могут быть использованы ролики других форм, и даже возможно использование вращающихся канавок на некоторых или всех роликах, если это будет необходимо по какой-либо причине.
В предпочтительном варианте направляющие ролики по меньшей мере одной группы роликов включают в себя ролики, оси вращения которых наклонены друг к другу в плоскости, перпендикулярной вышке. В этом случае направляющие ролики окружают трубопровод по крайней мере по части окружности и тем самым допускают некоторое расхождение между положением узла судно/вышка, с одной стороны, и вертикальной плоскостью, проходящей через прокладываемый подводный трубопровод, - с другой. В предпочтительном варианте направляющие ролики по меньшей мере одной группы роликов расположены по меньшей мере на четверти окружности вокруг трассы (линии движения) трубопровода, что обеспечивает возможность расхождения около 90° между положением узла судно/вышка, с одной стороны, и подводным трубопроводом - с другой. Еще более предпочтительно, когда направляющие ролики по меньшей мере одной группы роликов расположены в основном по всей окружности вокруг трассы трубопровода - при этом направляющее устройство будет работоспособным при любой ориентации судна относительно подводного трубопровода.
В предпочтительном варианте нижнее направляющее устройство выполнено в форме воронки, развалом направленной в направлении движения трубопровода в процессе его прокладки, с углом развала, возрастающим в направлении движения трубопровода при прокладке. В этом случае, какой бы участок направляющего устройства ни использовался для направления трубопровода при его прокладке, трубопроводу придается контролируемый изгиб, а прикладываемые к трубопроводу силы распределены между роликами разных групп.
Хотя объем патентных притязаний на данное изобретение предусматривает возможность использования направляющих роликов и для создания некоторого натяжения трубопровода, в предпочтительном варианте направляющие ролики установлены с возможностью свободного вращения, в результате чего единственной силой, воздействующей на трубопровод со стороны направляющих роликов, является поперечная сила.
В предпочтительном варианте по крайней мере некоторые из направляющих роликов установлены с возможностью вращения на опорах, закрепленных на держателях эластичной подвески, установленных с возможностью упругого смещения непосредственно или посредством других элементов. Достоинством изобретения является и то, что податливость направляющего устройства обеспечена за счет установки роликов на упругой конструкции с возможностью изменения положения оси вращения ролика, а не, к примеру, за счет упругости конструкции самого ролика, в результате чего изменяется эффективное направление роликов. Каждый ролик может быть установлен отдельно на собственной эластичной подвеске, однако предпочтительным является установка всей группы роликов на одной эластичной конструкции, обеспечивающей упругое смещение.
Изобретение, в частности, относится к прокладке сравнительно жестких трубопроводов, в противоположность, например, трубопроводам настолько мягким, что они могут быть свернуты в катушки при хранении. Желательно, чтобы сопротивление держателей упругому смещению (жесткость эластичной подвески при упругой деформации) превышало 100 кН/м, а еще лучше 500 кН/м. В описанном ниже варианте выполнения изобретения сопротивление смещению составляет порядка 5000 кН/м для некоторых верхних групп роликов и порядка 1000 кН/м для некоторых нижних групп роликов.
В предпочтительном варианте величина упругого смещения держателей составляет более 50 мм, а по крайней мере некоторые держатели имеют величину упругого смещения более 100 мм. В описанном ниже варианте выполнения изобретения смещение верхней группы роликов с сопротивлением смещению 5000 кН/м может составлять 100 мм, а смещение нижней группы роликов с сопротивлением 1000 кН/м может составлять 300 мм.
Понятно, что величина изгиба, придаваемого трубопроводу при его движении через нижнее направляющее устройство, может быть невелика. Одной из задач придания изгиба является равномерное распределение между группами роликов горизонтальных сил, действующих между направляющими роликами и трубопроводом. В варианте выполнения изобретения, описанном ниже, величина изгиба трубопровода составляет около 0,34 м на 10 м длины трубопровода; в этом варианте полная сила, действующая при нормальных условиях со стороны нижнего направляющего устройства, составляет около 1000 кН.
В предпочтительном варианте выполнения наклон вышки регулируется так, что угол укладки труб может регулироваться, например, в соответствии с глубиной укладки. В предпочтительном варианте выполнения нижнее направляющее устройство прикрепляется к вышке; при этом его положение автоматически регулируется вместе с вышкой. Угол наклона вышки может быть зафиксирован, например, соответствующим вертикальному положению.
Наклон вышки во время работы в предпочтительном варианте выполнения составляет от 45 до 90° к горизонтали.
В предпочтительном варианте вдоль трассы трубопровода под водой расположено три или более группы роликов, а еще лучше - пять или более групп роликов. В предпочтительном варианте некоторые группы роликов установлены вдоль трассы трубопровода и над водой; при этом изгиб трубопровода может начинаться над водой и, в случае, если вышка может наклоняться, даже выше оси шарнира вышки. В предпочтительном варианте группы роликов разнесены друг относительно друга вдоль трассы трубопровода в основном равномерно. Интервал между соседними группами роликов вдоль трассы трубопровода может составлять от 2 до 15 м, а еще лучше от 3 до 10 м. В варианте выполнения изобретения, описанном ниже, интервал составляет 5 м.
В предпочтительном варианте на судне имеются средства контроля сил, воздействующих на трубопровод со стороны роликов нижнего направляющего устройства. Предпочтительной является установка нескольких средств контроля сил совместно с соответствующими группами направляющих роликов для контроля сил, воздействующих на трубопровод со стороны соответствующих групп направляющих роликов. Средства контроля могут содержать несколько динамометрических элементов.
Судно может быть оборудовано средствами подъема отрезка трубопровода с палубы в одну с вышкой линию и стыковки указанного отрезка трубопровода к проложенному трубопроводу.
В соответствии с изобретением также предложен способ прокладки трубопровода с судна, в котором трубопровод спускают по узлу вытянутой вверх вышки судна и затем пропускают через нижнее направляющее устройство, содержащее несколько групп направляющих роликов, расположенных разнесенными друг от друга вдоль трассы трубопровода и ограничивающих боковые пределы этой трассы, причем осуществляют изгиб трубопровода при его прохождении через нижнее направляющее устройство и контролируют силы, воздействующие на трубопровод со стороны роликов нижнего направляющего устройства.
Судно, использованное в данном способе настоящего изобретения, может быть любого вида из описанных выше.
В предпочтительном варианте управление судном осуществляется в зависимости от результатов контроля сил, воздействующих на трубопровод со стороны роликов.
Судно, используемое в любом из способов настоящего изобретения, может быть выполнено в любой из определенных выше форм.
Некоторые формы выполнения предложенного судна-трубоукладчика описаны ниже на примерах со ссылками на прилагаемые чертежи, на которых:
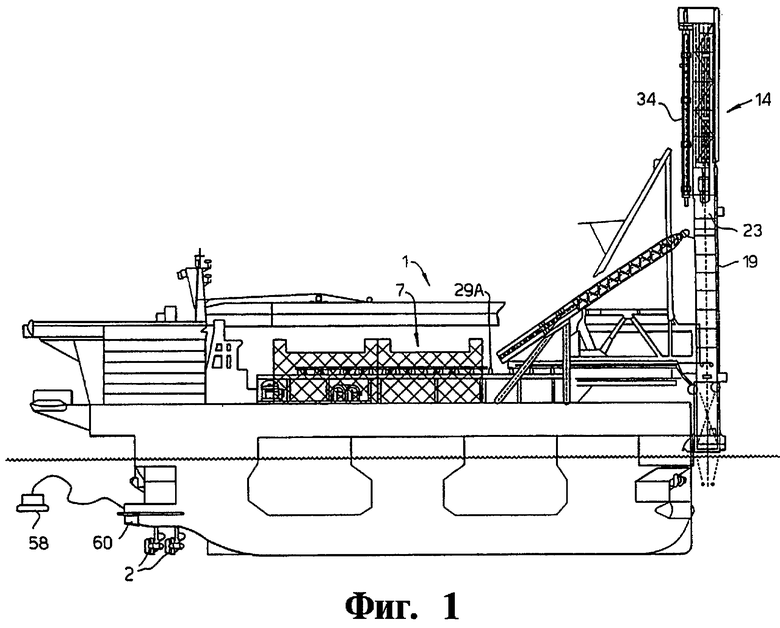
фиг.1 представляет вид сбоку сечения судна-трубоукладчика;
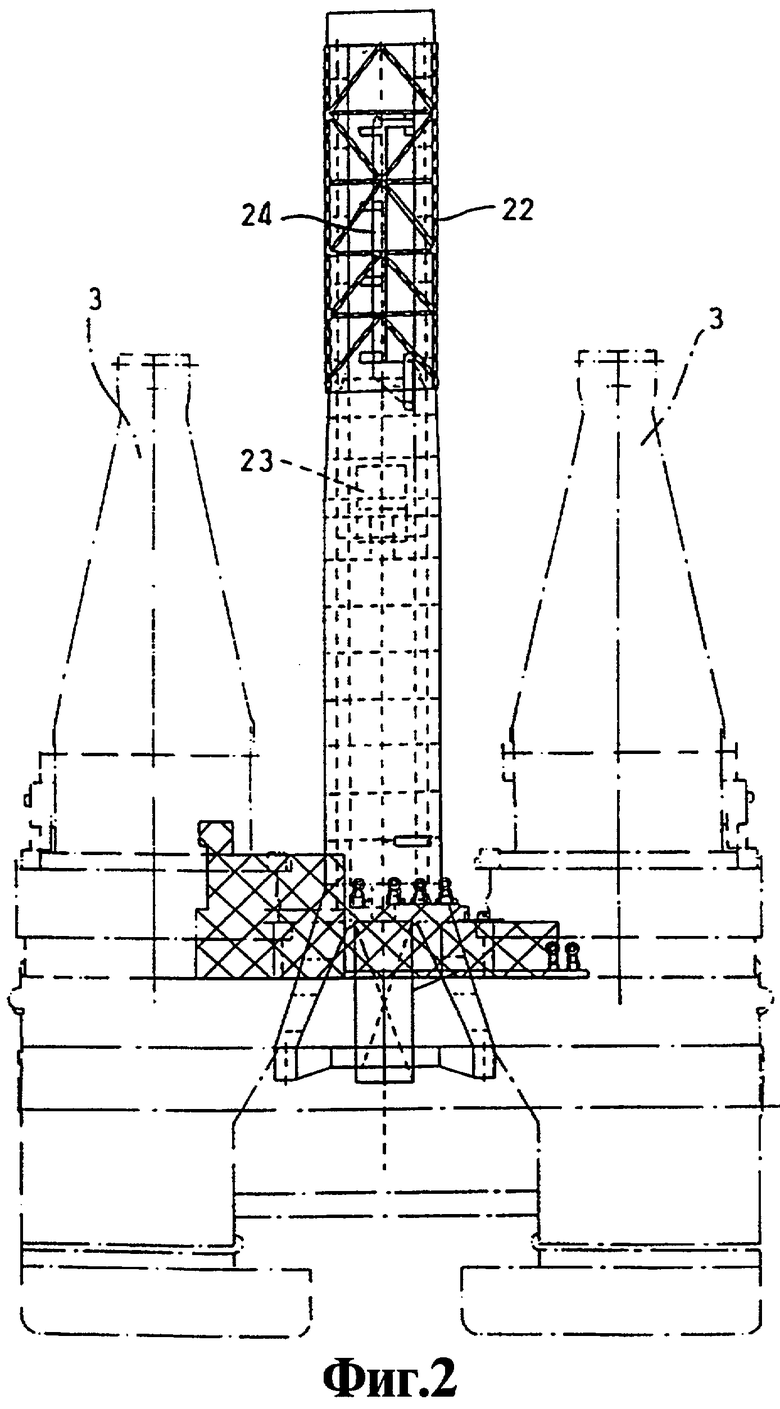
фиг.2 представляет вид спереди судна;
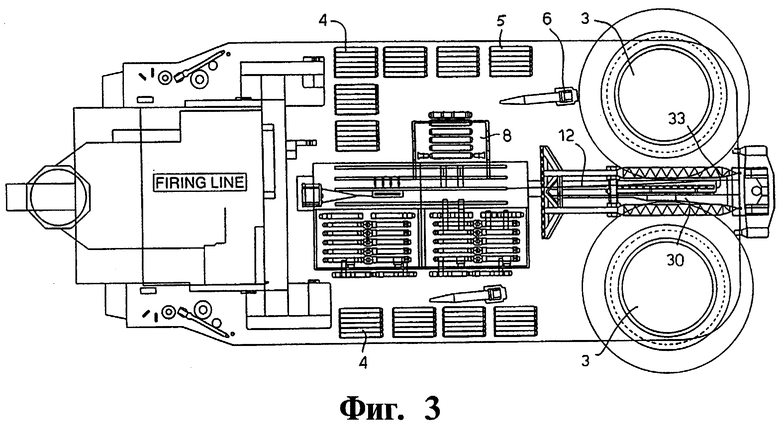
фиг.3 представляет вид сверху судна, часть вида представляет собой сечение;
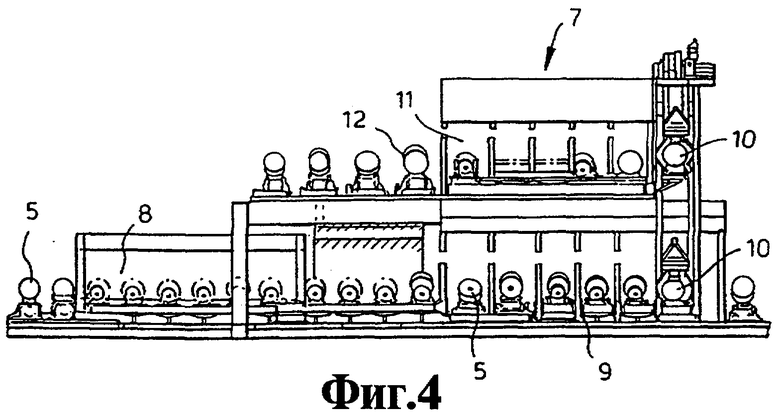
фиг.4 представляет сечение зоны подготовки труб на судне, в масштабе большем, чем на фиг.1;
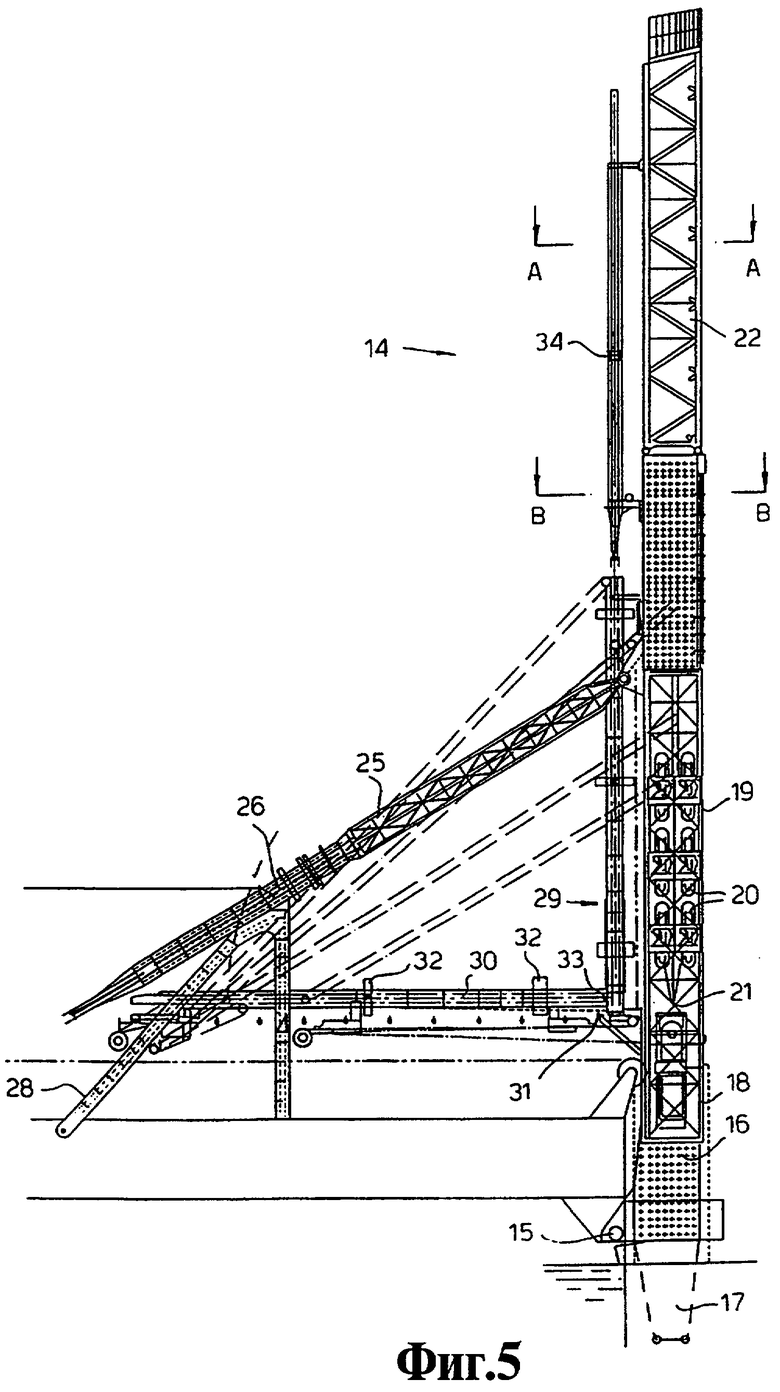
фиг.5 представляет вид сбоку вышки, в масштабе большем, чем на фиг.1;
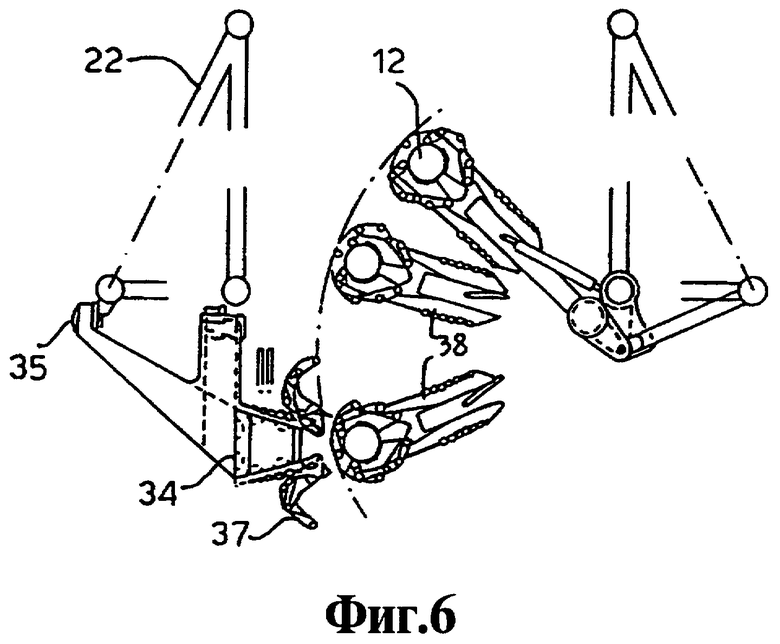
фиг.6 представляет поперечное сечение вышки по линии А-А на фиг.5;
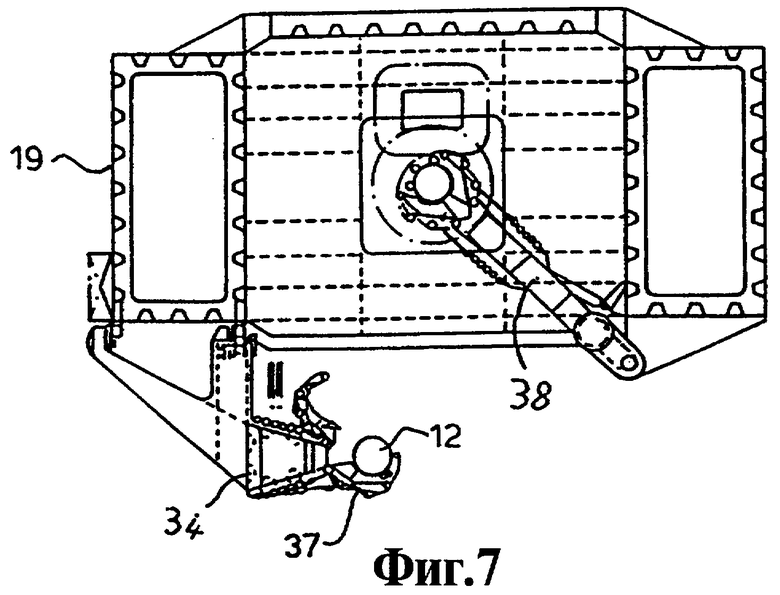
фиг.7 представляет поперечное сечение вышки по линии В-В на фиг.5;
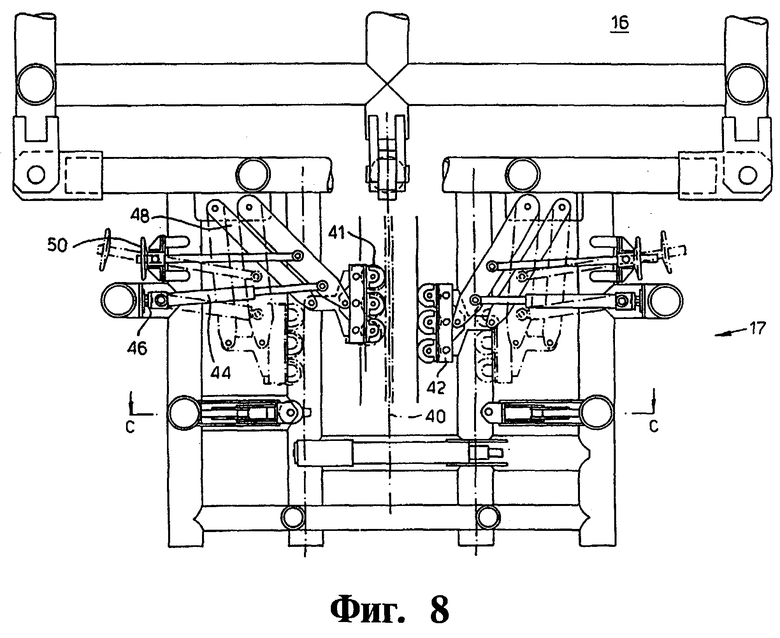
фиг.8 представляет продольное сечение части вышки - нижней спусковой аппарели;
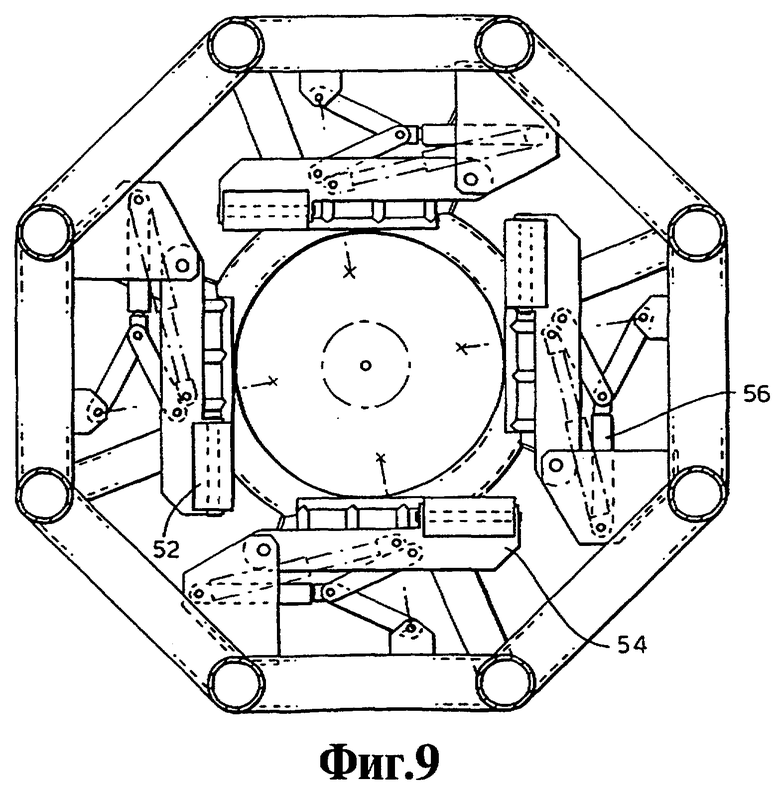
фиг.9 представляет поперечное сечение по линии С-С на фиг.8;
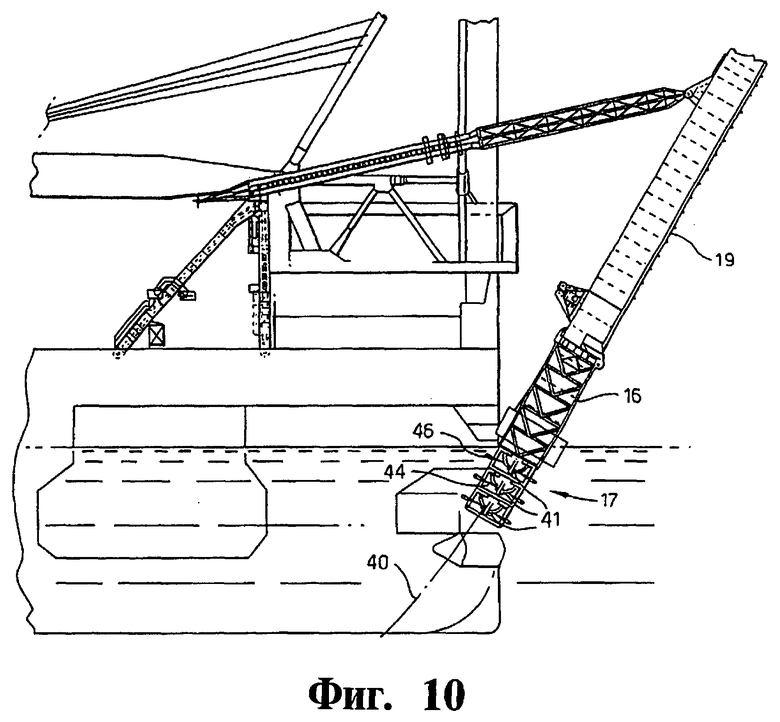
фиг.10 представляет вид сбоку части судна;
фиг.11 представляет вид сбоку нижней части вышки, аналогичной показанной на фиг.5-10, но имеющей измененное нижнее направляющее устройство для трубопровода;
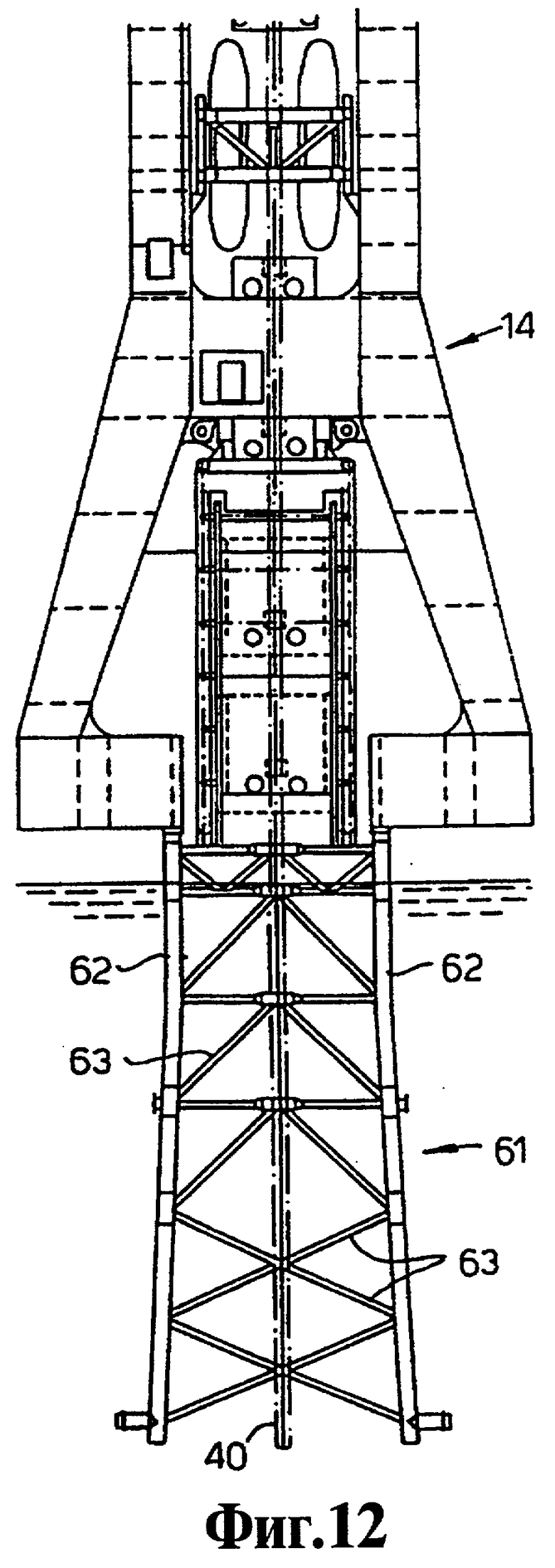
фиг.12 представляет вид сзади нижней части вышки, показанной на фиг.11;
фиг.13 представляет схематическое изображение нижней части вышки, изображенной на фиг.11, показывающее пространственное расположение направляющих роликов в измененном нижнем направляющем устройстве;
фиг.14 представляет вид сверху сечения нижнего участка измененного нижнего направляющего устройства;
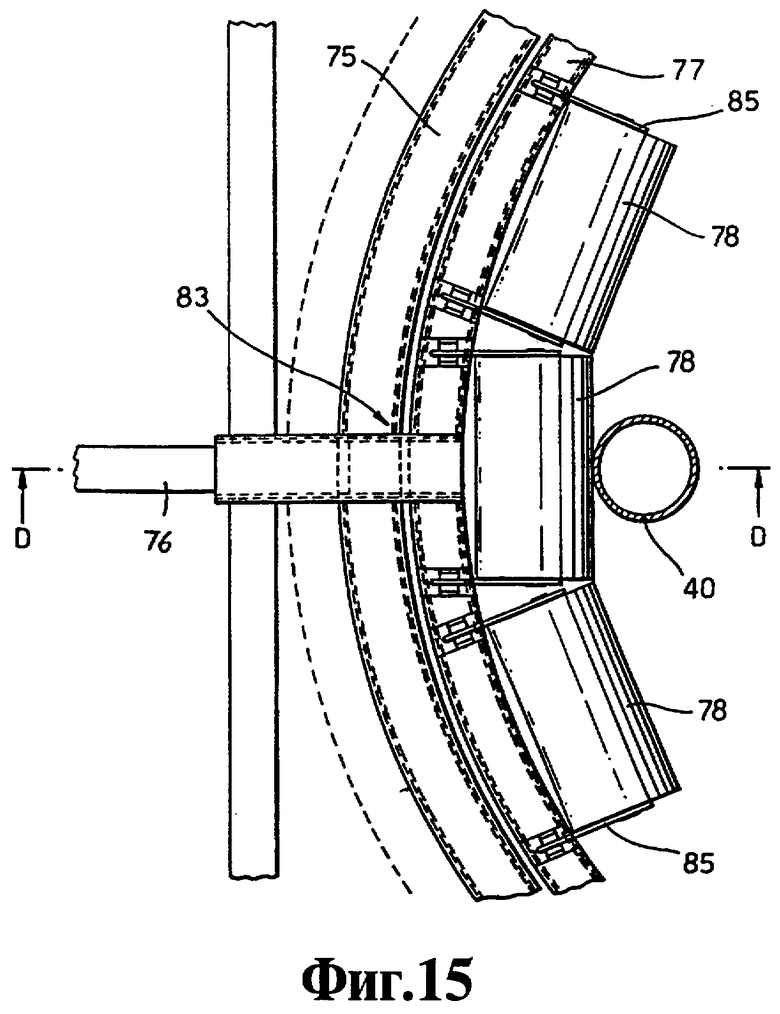
фиг.15 представляет в увеличенном по сравнению с фиг.14 масштабе вид сверху сечения части того же нижнего участка измененного нижнего направляющего устройства;
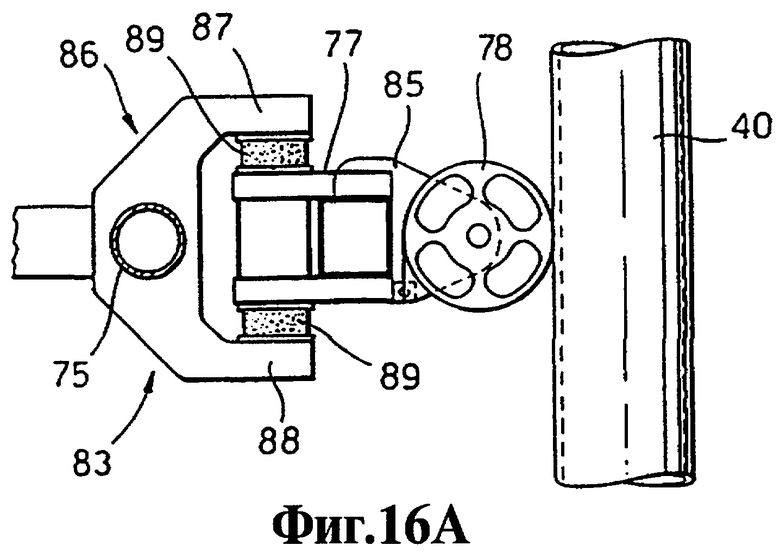
фиг.16А представляет вид сечения по линии D-D на фиг.15 направляющей части измененного нижнего направляющего устройства, где направляющая часть находится в ненагруженном состоянии;
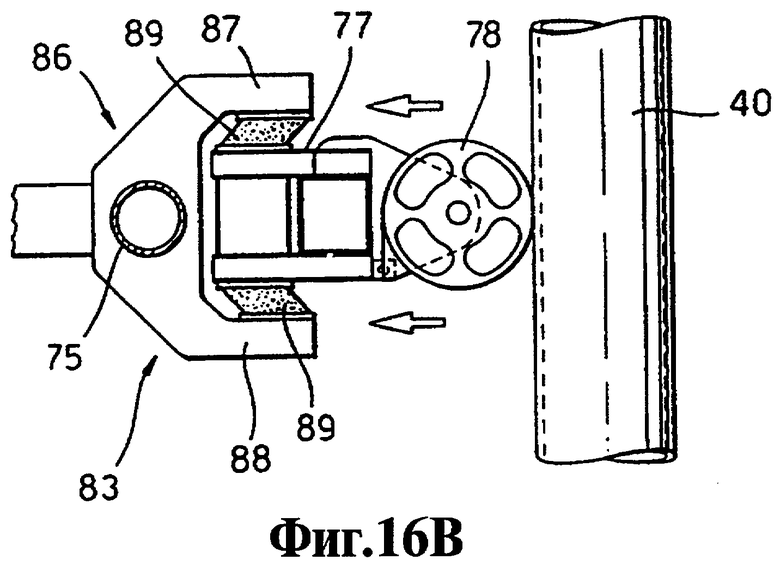
фиг.16В представляет вид сечения по линии D-D на фиг.15 направляющей части измененного нижнего направляющего устройства, где направляющая часть находится в нагруженном состоянии;
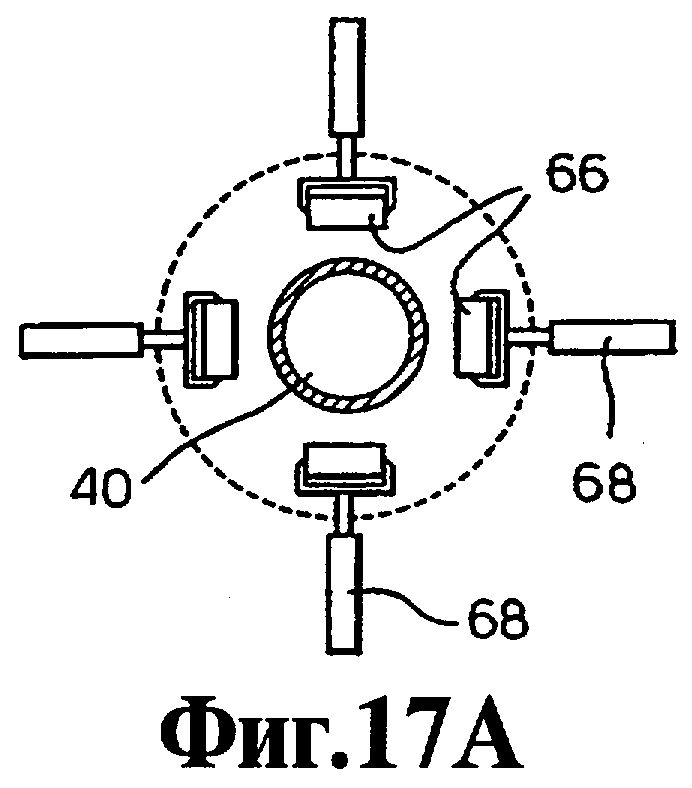
фиг.17А представляет вид сверху сечения самого верхнего участка измененного нижнего направляющего устройства;
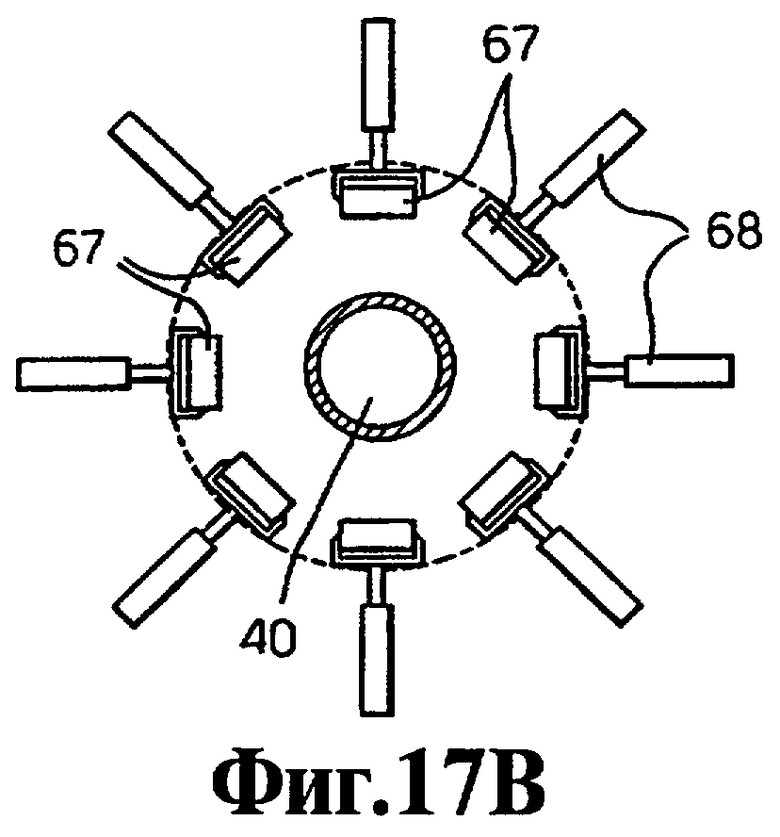
фиг.17В представляет вид сверху сечения верхнего участка измененного нижнего направляющего устройства; и
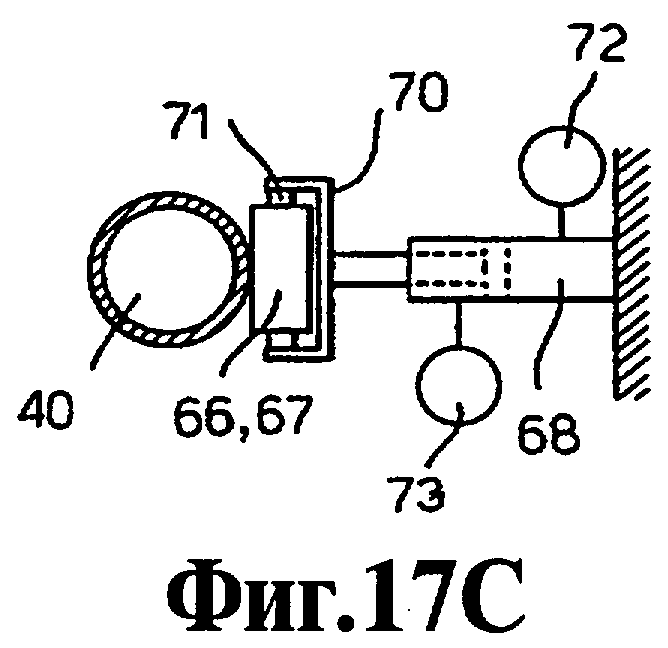
фиг.17С представляет вид сверху в увеличенном масштабе узла ролика того типа, что показан на фиг.17А и 17В.
На чертежах показан пример судна-трубоукладчика, в целом обозначенного цифрой 1, представляющего собой полупогружное судно, движение и маневрирование которого осуществляется с помощью средства продвижения судна, например винтов 2. Судно оборудовано двумя большими поворотными кранами 3, установленными по краям в зоне носовой части, имеющими обычную конструкцию, которые далее в целях простоты изложения не будут подробно описаны и показаны.
Краны 3 поднимают на борт судна контейнеры 4 с трубами (секциями труб), которые доставляются грузовыми баржами или другим подобным способом (не показаны), и укладывают их на палубе по обеим сторонам судовых надстроек.
Далее трубы 5 подаются гусеничными кранами 6 и транспортерами (не показаны) к площадке сборки двух- и четырехсекционных плетей (отрезков трубопровода), которая оборудована в виде модуля 7, установленного на палубе судна 1 (см. фиг.3 и 4). Модуль 7 четырехсекционных плетей размещен по правому борту от площадки наращивания трубопровода.
Гусеничные краны 6 сначала перемещают трубы 5 от складов, представляющих собой стеллажи на судне или контейнеры, в которых трубы были погружены на судно, к модулю 8 участка фацетирования, расположенному по левому борту судна, в непосредственной близости к его осевой линии. После фацетирования труб 5 поперечные конвейеры переносят трубы к площадке 9 двухсекционных плетей модуля 7 четырехсекционных плетей, где производится сварка одинарных секций. Поперечные конвейеры могут состоять из лотков, двигающихся по рельсам, проходящим поперек судна. Трубы 5 могут удерживаться на лотках посредством роликов, которые допускают продольное движение труб и могут быть отрегулированы под трубы разного диаметра.
Модуль 7 четырехсекционных плетей имеет два различных уровня. На нижнем уровне, на площадке 9 двухсекционных плетей, одновременно четыре трубы 5, полученные с участка фацетирования, передаются на соответствующие позиции в модуле, где свариваются попарно в двухсекционные плети 10. Сварка выполняется на четырех сварочных постах, а рентгеновский контроль качества сварных швов производится на пятом рабочем посту. Если сварка выполнена правильно, двухсекционные плети 10 поднимаются на второй уровень, на площадку 11 четырехсекционных плетей. В противном случае плеть удаляется из сборочной зоны модуля 7 для ремонта, а в случае его невозможности - для разрезки. На площадке 11 четырехсекционных плетей две двухсекционные плети 10 свариваются друг с другом (на четырех сварочных постах), а затем проверяются на пятом посту (пост неразрушающего контроля), в результате чего получается четырехсекционная плеть 12. Если плеть 12 соответствует требованиям, она перемещается по горизонтали к осевой линии судна, где установлен конвейер для транспортировки ее к носовой части. Если неразрушающим контролем обнаружен дефект сварки, плеть сдвигается к левому борту судна 1 для ремонта или разрезки. Если необходима разрезка, четырехсекционная плеть 12 разрезается на четыре одиночных секции 5 и затем передается обратно на участок 8 фацетирования, где снова производится снятие фасок перед возвращением на сварку.
На носу судна 1, по его осевой линии, между двумя кранами 3 установлена монтажная вышка, в целом имеющая обозначение 14. Конструкция вышки 14 обеспечивает простоту ее установки и демонтажа. Вышка 14 соединена с корпусом судна двумя шарнирами 15, обеспечивающими рабочий угол наклона при прокладке, определяемый продольной осью вышки, в диапазоне от 90 до 120° (т.е. от вертикального положения до наклона в 30° от вертикали). Такой наклон необходим для прокладки трубопроводов различного размера на различной глубине (от мелководья до больших глубин). Угол наклона вышки 14 определяется шарнирной подъемной системой, описанной ниже.
Вышка 14 состоит из трех основных секций, как это показано на фиг.5.
Самая нижняя секция, или корзина 16, предназначена для того, чтобы выдерживать максимальную силу натяжения трубопровода, воспринимаемую одним или несколькими фрикционными хомутами 18. В ней расположены хомуты 18, а на ее нижнем краю имеется нижняя спусковая аппарель 17 с одним или несколькими выходными роликами 41, направляющими трубопровод 40 при его спуске с судна. В предпочтительном варианте вышка выполнена с возможностью ее установки и демонтажа с помощью кранов 3, или вспомогательным судном-краном, и хранения на палубе или барже.
Фрикционные хомуты 18 включают в себя, по крайней мере, неподвижный хомут для надежного захвата (удержания) трубопровода 40 во время перерывов в прокладке. В предпочтительном варианте также предусмотрены хомуты, перемещаемые гидравлическими подъемниками, которые могут быть использованы при укладке труб с прикрепленными к ним объектам, которые слишком велики или имеют неправильную форму, чтобы должным образом удерживаться натяжными устройствами.
В средней секции 19 размещены три натяжных устройства 20, которые в процессе работы спускают трубопровод в воду, поддерживая заданное натяжение трубопровода, и опорные ролики для трубопровода, направляющие его, когда вышка 14 расположена не вертикально. Натяжные устройства представляют собой натяжные устройства гусеничного типа, аналогичные хорошо известным в течение ряда лет в S-укладке, а опорные ролики для поддержки трубопровода также относятся к известному типу. Они подробно не описываются. В средней секции 19 также располагаются убирающиеся шкивы (не показаны) системы временного спуска и подъема трубопровода, которые могут быть убраны, когда они не используются. Также на вышке предусмотрены средства пристыковки отрезка трубопровода, выставленного с вышкой в одну линию (выровненного по отношению к вышке), к проложенному трубопроводу. В частности, в нижнем конце средней секции располагаются пост неразрушающего контроля и пост 21 выполнения монтажного стыка с плавающим полом (нижняя площадка). А в верхнем конце средней секции расположен сварочный пост 23 с "плавающим" полом (верхняя площадка). Расстояние между сварочными постами 21 и 23 (верхней и нижней площадками) приблизительно соответствует длине отрезка трубопровода, в частности четырехсекционной плети 12, при этом верхняя часть плети может находиться у поста 23, а нижняя расположена у поста 21.
Система временного спуска и подъема содержит двухбарабанную лебедку (с электроприводом) с присоединенными к ней наматывающим барабаном и тросом из стальной проволоки. Стальной трос идет к убирающемуся шкиву (расположен в средней части вышки), после чего соединяется с механизмом вытягивания. Система временного спуска и подъема располагается на главной палубе в середине на осевой линии судна 1 по соседству с модулем четырехсекционных плетей.
Верхняя секция 22 вышки 14 представляет собой относительно легкую конструкцию, поскольку она не должна выдерживать усилие натяжения трубопровода. В ней расположены стыковочное устройство и центрирующий пост 24 (фиг.2). Верхняя секция 22 имеет открытую конструкцию для упрощения переноса плети 12 с трубопогрузчика, описанного ниже, на центрирующий пост 24. Верхняя секция 22 может быть установлена на среднюю секцию 19 и демонтирована с нее в рамках монтажных работ на борту судна.
Подъемная система, управляющая изменением наклона вышки 14, использует стрелы 25, присоединенные к верхней части средней секции 19 на ее задней или внутренней поверхностях, и к подъемным устройствам 26 домкратного типа на раме 28 опорного основания, размещенной на палубе непосредственно за кранами 3 со стороны кормы. Подъемная система содержит гидравлические цилиндры, к каждому из поршней которых прикреплено по комплекту из четырех гидравлически управляемых стопорных штырей, которые входят в ряд отверстий в стрелах 25. Когда вышка не поддомкрачена, она удерживается похожими стопорными штырями, установленными неподвижно в раме 28 основания. Если вышку необходимо сдвинуть больше, чем на величину рабочего хода гидравлических цилиндров, она удерживается стопорными штырями, пока цилиндры возвращаются в исходное положение для следующего хода.
Плеть 12 трубы, ожидающая в практически горизонтальном положении на площадке 11 четырехсекционных плетей, переносится продольными конвейерами 29А к средству подъема отрезка трубопровода с палубы в одну с вышкой линию, например к трубопогрузчику 29, установленному у подошвы вышки 14. Продольные конвейеры могут состоять из роликов 29А, оси которых наклонены к горизонтали таким образом, что ролики образуют V-образную структуру, внутри которой двигается труба. Они могут устанавливаться с возможностью перемещения ближе или дальше от осевой линии с тем, чтобы трубы разных диаметров могли перемещаться на требуемой высоте над палубой.
Трубопогрузчик 29 состоит в основном из балки 30, передающей трубу 12 с площадки 11 четырехсекционных плетей к средней секции 19 вышки 14 посредством поворота в шарнире 31. Благодаря шарнирному креплению с возможностью поворота трубопогрузчик без проблем устанавливает трубу в любые положения, которые она должна занимать при различных рабочих углах прокладки (от 90 до 120°). Конструкция балки 30 обеспечивает ее минимальный вес для получения минимальной инерции системы. Как видно на фиг.3, балка погрузчика расположена по правому борту от площадки наращивания трубопровода, и на ней размещены зажимающие узлы 32 (фиг.5), которые крепко захватывают плеть 12 трубы и удерживают ее рядом с балкой во время поворота. Плеть 12 трубы подается горизонтально роликовыми конвейерами 29А от площадки 11 четырехсекционных плетей в зону погрузки и затем, при необходимости, сразу же поднимается подъемниками труб (подробно не показаны) в положение, где она может быть захвачена зажимающими узлами 32 на трубопогрузчике 29. На ближнем к подошве конце погрузчика 29 установлен механический стопор 33, который предотвращает выпадение трубы при отказе гидравлических зажимов 32. В нормальных же условиях труба не опирается на стопор 33 во избежание повреждения фацетированного торца трубы.
Поворот трубопогрузчика 29 осуществляется посредством двух лебедок (не показаны), установленных на А-образной раме 28. Подъемная лебедка, трос которой проходит по шкиву на вышке, поднимает и опускает трубопогрузчик 29, а тем временем лебедкой противонатяжения прилагается постоянное натяжение в противоположном направлении, чтобы предотвратить неуправляемое движение трубопогрузчика, когда он в процессе поворота проходит вертикальное положение, или под действием движения судна. Скорость вращения лебедки выбирается такой, чтобы погрузка была закончена в пределах цикла процесса прокладки.
Назначение погрузчика 29 состоит только в том, чтобы захватить трубу 12 (посредством зажимов 32) и повернуть ее в положение с тем же углом наклона, что и у вышки 14. Как только труба 12 установлена вдоль вышки 14, погрузчик останавливается и ждет (продолжая держать трубу) спуска подъемника 34.
Подъемник 34 захватывает трубную плеть 12 с погрузчика 29 и переносит ее на уровень центрирующего поста 24. Подъемник состоит, в основном, из передвижного блока, перемещающегося по двум рельсам 35, расположенным в средней части 19 и верхней части 22 вышки слева от осевой линии погрузчика 29. На передвижном блоке установлены раскрывающиеся зажимы 37. Как показано на фиг.6, когда зажимы 37 находятся в полностью открытом положении, они сдвигаются к левому борту относительно площадки наращивания трубопровода так, что погрузчик 29 может установить трубную плеть 12 вдоль подъемника 34. Если ведется работа с небольшими трубами, могут быть также предусмотрены направляющие ролики. В нижнем конце подъемника 34 установлен предохранительный упор для поддержки трубной плети в случае отказа гидравлических зажимов 37. Когда погрузчик 29 подходит к вышке 14, а подъемник 34 находится в своем нижнем положении, зажимы 37 захватывают трубу 12, а зажимы 32 отпускают ее. После этого подъемник 34 поднимает трубу в верхнее положение. Затем труба 12 перемещается к переносящим зажимам 38.
Три разнесенных по вертикали переносящих зажима 38 используются для переноса трубной плети 12 от подъемника к центрирующему устройству 24 (на фиг.6 показан один из переносящих зажимов в трех различных положениях); зажимы выполнены как независимые узлы, каждый из которых содержит поворачивающийся и удлиняющийся рычаг, управляемый преобразователями, на котором установлен полностью открывающийся зажим. Когда зажимы находятся во внешнем положении (отведены в сторону), подъемник подает к ним трубу. Если же они находятся во внутреннем положении, центрирующие устройства 24 сдвигаются в поперечном направлении и забирают у них трубу. Если трубная плеть 12 доставлена подъемником 34 на место до того, как центрирующие устройства 24 освободились для ее приема, переносящие зажимы 38 могут удерживать трубную плеть на запасной позиции, как показано на фиг.6. Кроме того, пока трубная плеть 12 удерживается на запасной позиции, в нее может быть введен разъемный кабель или шланг энергоснабжения и/или нижний конец может быть предварительно разогрет для сварки.
Использование центрирующих устройств 24 необходимо для точной установки трубной плети 12 в одну линию с трубопроводом 40. Эти устройства могут перемещать трубу во всех трех направлениях. Они состоят из комбинации роликовых зажимов, которые фиксируют горизонтальное положение трубной плети 12, позволяя ей вращаться, и по меньшей мере одного вращающегося фрикционного зажима, посредством которого может осуществляться регулировка ориентации трубы вокруг ее оси. Каждое устройство конструктивно не зависит от остальных, но управление ими должно производиться посредством преобразователей для обеспечения точного совмещения устройств при выравнивании трубы. Между центрирующими устройствами 24 установлены направляющие ролики для обеспечения надежной поддержки трубы 12 во время прокладки, когда центрирующие зажимы открыты, даже при наклонном положении вышки 14.
На фиг.8, 9 и 10 показана нижняя спусковая аппарель 17, на которой установлены выходные ролики 41 группами по три ролика на тележках 42. В процессе прокладки трубопровода каждая тележка 42 прижимается к трубопроводу 40 гидравлическим цилиндром 44, давление в котором создается аккумулятором (не показан), а нагрузка на тележку 42 контролируется динамометрическим элементом 46. Движением каждой тележки управляет рычажный механизм 48, при этом полностью убранное положение устанавливается винтовыми домкратами 50. Таким образом, выходные ролики 41 позволяют одновременно контролировать положение трубопровода 40 и управлять движением трубопровода при его спуске с судна. Если необходимо более точное управление, может быть установлено несколько групп тележек 42, одна над другой, как это показано на фиг.10, что позволяет управлять изгибом трубопровода, в результате чего можно вести его прокладку под небольшим углом коси вышки 14, что повышает гибкость применения судна.
Ниже выходных роликов 41 имеются направляющие ролики 52 для троса. Ролики 52 установлены на шарнирных рычагах 54 и перемещаются между выдвинутым и убранным положениями гидравлическими цилиндрами 56. В процессе прокладки трубопровода они находятся в полностью убранном состоянии и выдвигаются для того, чтобы направлять трос в режиме временного спуска и подъема трубопровода.
На судне 1 базируется дистанционно управляемый аппарат 58 подводного обслуживания трубопровода для наблюдения за касанием трубопроводом 40 дна. Поскольку точка касания находится прямо под кормой судна, почти под ней, таким аппаратом можно дистанционно управлять с кормовой палубы судна 1, не применяя длинные неудобные страховочные тросы. Вместо этого, или дополнительно к использованию такого ДУА, касание дна можно контролировать активными или пассивными датчиками 60, установленными на кормовой части судна.
В процессе работы отрезок трубопровода (плеть) 12 выставляется центрирующими устройствами 24 в одну линию с трубопроводом и удерживается ими, пока нижний конец отрезка трубопровода приваривается к верхнему концу трубопровода 40 на сварочном посту 23. Затем центрирующие устройства освобождают пристыкованный отрезок трубопровода, судно продвигается вперед, а трубопровод выпускается натяжными устройствами 20 на длину пристыкованного отрезка (четырехсекционной плети 12). После этого только что выполненный сварной шов проверяется на посту 21 неразрушающего контроля, а новая плеть 12, которая тем временем была доставлена погрузчиком 29 и подъемником 34, передается переносящими зажимами к центрирующим устройствам 24.
Вышка 14 состоит из трех секций и прикреплена к судну, а модуль 7 четырехсекционных плетей выполнен в виде одного или нескольких автономных модулей, прикрепленных к палубе таким образом, что все трубоукладочное оборудование может быть установлено и демонтировано просто и быстро. Это позволяет переоборудовать судно в целом из трубоукладчика в обычный полупогружной плавучий кран.
Например, судно, изображенное на чертежах, может иметь следующие размеры:
Длина судна 200 м
Высота вышки 135 м
Диапазон диаметров труб (наружный диаметр) от 4 до 32’’ (от 101 до 813 мм)
Максимальный диаметр укладываемых
объектов (при открытых натяжных устройствах) 2,5 м
Диапазон глубин прокладки для трубы 4’’ (101 мм) 50-3000 м
Диапазон глубин прокладки для трубы 32’’ (813 мм) 200-2000 м
Максимальная удерживающая сила при прокладке
(натяжные устройства) 525 т
Максимальная удерживающая сила при прокладке
(подвижные зажимы) 2000 т
Угол наклона монтажной вышки 90-120°
Тяговое усилие промежуточной лебедки временного
спуска и подъема (двойной барабан) до 550 т (макс)
Тяговое усилие основной лебедки временного спуска
и подъема (линейная лебедка) 2000 т (макс)
Длина секций труб, перевозимых на борту 12,2 м
Длина плетей труб (4×10-15 м) 48,8 м
Продолжительность фазы укладки 2 мин
Максимально допустимая высота волны при укладке (важно) 4 м
На фиг.11-17С представлен измененный вариант нижнего направляющего устройства 61, который может быть использован на судне в соответствии с настоящим изобретением вместо нижней спусковой аппарели 17. На фиг.11-17С части, соответствующие частям, показанным на других чертежах, имеют те же самые номера позиций. Как показано на фиг.11 и 12, устройство 61 в целом представляет собой трубчатую раму, включающую четыре продольных силовых элемента 62 и поперечные перемычки 63, соединенные вместе с образованием жесткой конструкции, прикрепленной к нижнему торцу вышки 14 четырьмя опорами (проушинами), по одной сверху каждого из элементов 62. Опоры прикреплены к вышке соответствующими штыревыми соединениями.
Далее на фиг.13-17С показано, как конструкция, образованная элементами 62 и 63, используется для размещения различных узлов на разных уровнях, включая неподвижные и подвижные зажимы 18А и 18В соответственно (фиг.13), три группы регулируемых роликов 64А, 64В и 64С и шесть групп направляющих роликов 65A-65F, причем каждая группа содержит кольцо из роликов, как будет более подробно описано ниже.
Регулируемые ролики 64А, 64В и 64С выполняют ту же задачу, что и ролики 52, описанные со ссылкой на фиг.8, 9 и 10. Ролики 64А, 64В и 64С установлены таким образом, что обеспечивается их движение в радиальном направлении, а их перемещение осуществляется соответствующими гидравлическими устройствами с цилиндрами и поршнями. В описываемом конкретном примере выполнения изобретения каждая из групп роликов 64А и 64В расположена, как показано на виде сверху на фиг.17А, и содержит 4 ролика 66, равномерно (с одинаковым угловым интервалом) расположенных вокруг трассы трубопровода, а все ролики из группы роликов 64С установлены, как показано на виде сверху на фиг.17В, и насчитывают восемь роликов 67, разнесенных друг от друга на одинаковые угловые расстояния. Одним из назначений роликов 64А, 64В и 64С является удержание трубопровода (подводного трубопровода) 40 в пределах центральной круговой области регулируемого радиуса таким образом, чтобы хомуты 18А и 18В, которые используются только в особых случаях, например в аварийной ситуации, могли гарантированно захватывать трубопровод. Вместе с тем, другим назначением роликов, особенно роликов 64В и 64С, является обеспечение возможности некоторого начального контролируемого изгиба трубопровода даже при их относительно высоком расположении над поверхностью воды. Телевизионные камеры 69 (фиг.13) и датчики нагрузки, связанные с узлами крепления роликов, позволяют контролировать прохождение трубопровода по роликам; также можно контролировать и регулировать выход штоков поршней гидравлических цилиндров и давление жидкости в этих цилиндрах.
На фиг.17С в качестве примера изображено одно из гидравлических поршневых устройств. Видно, что ролики 66 и 67 установлены с возможностью вращения на кронштейне (опоре) 70, а динамометрический стержень 71 обеспечивает измерение силы, воздействующей со стороны трубопровода 40 на ролики 66, 67. Кронштейн прикреплен к поршню одного из гидравлических устройств 68, которое содержит датчик 72 давления для контроля давления в цилиндре и датчик положения для контроля положения поршня относительно цилиндра.
Все сигналы с телевизионных камер 69 и датчиков 72, 73, а также динамометрических стержней 71 поступают по многожильному кабелю 79 через распределительные коробки 80 в блок 81 управления, который может быть установлен на пункте управления вышкой. Сигналы управления работой гидравлических поршневых устройств 68 поступают из блока 81 управления в блок 82 регулирования подачи жидкости в гидросистему и управления управляющими клапанами.
Далее более подробно описывается установка шести групп направляющих роликов 65A-65F со ссылкой на фиг.13, 14, 15, 16Аи 16В. Для удобства изложения сначала будет описано расположение группы роликов 65D, группы, изображенной на фиг.14. Стальное кольцо 75 является основным силовым элементом, обеспечивающим жесткую опору для группы роликов, и имеет диаметр, позволяющий разместить внутри него все ролики 65D по окружности. Кольцо 75 жестко прикреплено к четырем продольным элементам 62 нижнего направляющего устройства посредством стоек 76. Непосредственно внутри кольца 75 находится другой кольцеобразный элемент 77, на котором установлены с возможностью вращения ролики 78. Кольцеобразный элемент 77 соединен с кольцом 75 в четырех точках, расположенных на равных угловых расстояниях друг от друга вокруг группы роликов, посредством упругих держателей 83, показанных на фиг.16А и 16В.
На фиг.15, 16А и 16В, в частности, показано, что ролики 78 закреплены с обоих концов с возможностью вращения на кронштейнах 85, которые прикреплены к кольцеобразному элементу 77 и выступают от него по радиусу внутрь. В четырех точках к кольцу 75 приварены кронштейны 86 держателей 83, обеспечивающих эластичную подвеску роликов, а каждый кронштейн 86 имеет верхнее плечо 87 и нижнее плечо 88, которые выступают по радиусу внутрь, охватывая кольцеобразный элемент 77. Каждое из плеч 87, 88 соединено с элементом 77 соответствующей опорой 89 из эластомера. На фиг.16А показаны опоры в ненапряженном состоянии, в то время как на фиг.16В опоры 89 показаны в напряженном состоянии в результате смещения роликов 78 по радиусу наружу (вследствие чего произошло соответствующее перемещение элемента 77) под действием силы, действующей со стороны трубопровода 40. На фиг.16В видно, что для обеспечения этого смещения опоры 89 испытывают деформацию сдвига.
С каждой группой направляющих роликов 65A-65F связаны динамометрические элементы (не показаны), сигналы от которых направляются в блок 81 управления через распределительные коробки 80 и кабель 79. Сигналы от динамометрических элементов могут быть использованы устройством управления для коррекции процесса прокладки трубопровода или для изменения направления или скорости движения судна, и т.п.
Далее будет описана работа направляющих роликов в процессе прокладки трубопровода. Для простоты изложения будет рассмотрен случай вертикального положения вышки, однако следует иметь в виду, что работа направляющего устройства, по существу, не изменится и при наклоне вышки. Также для простоты изложения вначале будет сделано предположение, что судно движется прямо над трассой прокладки трубопровода, а его осевая линия совмещена с этой трассой.
Для того чтобы кривизна трубопровода в районе дна не оказалась чрезмерной, необходимо, чтобы при прокладке трубопровода со стороны судна на трубопровод воздействовала горизонтальная сила в направлении прокладки и чтобы также создавалась сила натяжения. В то же время прилагаемая сила не должна создавать чрезмерных местных напряжений в трубопроводе.
В соответствии с этим желательно, чтобы каждая группа роликов 65A-65F воздействовала на трубопровод с горизонтальной силой, и желательно, чтобы силы воздействия каждой группы роликов были примерно одинаковы. В варианте выполнения изобретения это достигается таким размещением групп роликов, когда они располагаются вдоль изогнутой линии, обеспечивая контролируемую степень изгиба трубопровода в процессе его прохождения через группы роликов. Благодаря эластичной подвеске роликов распределение нагрузки по разным группам роликов становится еще более равномерным.
Особенно полезной особенностью конструкции направляющего устройства является то, что каждая группа роликов полностью окружает трубопровод. Это позволяет вести прокладку, когда судно находится под любым углом к направлению трубопровода, что может быть желательным или существенным при прокладке трубопровода в условиях сильного течения.
В конкретном примере изобретения, который может быть использован в конкретном примере описанного выше судна, группы роликов 65A-65F разнесены вдоль трассы трубопровода с интервалом 5,2 м, причем верхняя группа роликов 65А находится над уровнем воды, а все остальные группы роликов находятся под водой. В этом случае расстояние между окружными поверхностями двух диаметрально противоположных роликов в каждой группе составляет:
Группа роликов Расстояние, м
65А 2,44
65В 3,54
65С 5,0
65D 6,79
65Е 8,96
65F 11,48
Держатели групп роликов 65А-65С обладают достаточно высокой жесткостью. Радиальная жесткость колец 77 этих групп роликов в общем случае превышает 100 кН/м, предпочтительно 500 кН/м и в рассматриваемом здесь варианте составляет около 5000 кН/м (при упругом смещении, которое в общем случае превышает 50 мм и в рассматриваемом здесь варианте составляет максимум 100 мм), в то время как держатели групп роликов 65D-65F имеют меньшую жесткость и обеспечивают радиальную жесткость колец 77 для этих групп порядка 1000 кН/м (при упругом смещении, которое в общем случае превышает 100 мм и в рассматриваемом здесь варианте составляет максимум 300 мм). При нормальной работе общая нагрузка, обычно прикладываемая к трубопроводу всеми шестью группами роликов, составляет около 1000 кН, в результате чего сила, действующая между каждым роликом и трубопроводом, составляет около 170 кН.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДНО-ТРУБОУКЛАДЧИК (ВАРИАНТЫ) И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 1999 |
|
RU2230967C2 |
| Трубоукладочное судно (варианты) и способ укладки трубопровода | 2012 |
|
RU2701981C2 |
| Трубоукладочное судно (варианты) и способ укладки трубопровода (варианты) | 2012 |
|
RU2606540C2 |
| ТРУБОУКЛАДОЧНОЕ СУДНО (ВАРИАНТЫ) И СПОСОБ УКЛАДКИ ТРУБОПРОВОДА С СУДНА | 2012 |
|
RU2597730C2 |
| МОРСКОЕ СУДНО ДЛЯ УКЛАДКИ СТАЛЬНЫХ ТРУБ, ГИБКИХ ЭЛЕМЕНТОВ И ПОДВОДНЫХ КОНСТРУКЦИЙ В ЛЕДОВЫХ УСЛОВИЯХ | 2012 |
|
RU2509677C1 |
| КОМПЛЕКС ОБОРУДОВАНИЯ ДЛЯ СВАРКИ МОРСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2544620C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УЗЛОВ "ТРУБА-В-ТРУБЕ" НА БОРТУ СУДНА | 2018 |
|
RU2741160C1 |
| СПОСОБ ПРОКЛАДКИ ПОДВОДНОГО ТРУБОПРОВОДА, СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ, И МОНТАЖНЫЙ КОМПЛЕКС СОЕДИНЕНИЯ ТРУБ, ИСПОЛЬЗУЕМЫЙ В НЕЙ | 2005 |
|
RU2324100C2 |
| СПОСОБ УКЛАДКИ ТРУБОПРОВОДА С СУДНА (ВАРИАНТЫ), СПОСОБЫ ХРАНЕНИЯ И ПРЕДВАРИТЕЛЬНОЙ СБОРКИ СЕКЦИЙ ТРУБЫ НА СУДНЕ-ТРУБОУКЛАДЧИКЕ И СУДНО-ТРУБОУКЛАДЧИК (ВАРИАНТЫ) | 2008 |
|
RU2478862C2 |
| НАПРАВЛЯЮЩАЯ КОНСТРУКЦИЯ ДЛЯ УКЛАДКИ ПО J-ОБРАЗНОЙ КРИВОЙ | 2017 |
|
RU2707691C1 |



Изобретение относится к строительству и используется при сооружении подводных трубопроводов. Судно-трубоукладчик содержит вытянутую вверх вышку, определяющую трассу трубопровода при его прокладке, и нижнее направляющее устройство для направления трубопровода после прохождения им вышки. Нижнее направляющее устройство снабжено группами направляющих роликов, разнесенных вдоль трассы трубопровода и ограничивающих боковые пределы трассы. Направляющие ролики расположены с возможностью изгиба трубопровода при его прохождении через нижнее направляющее устройство, а судно снабжено средствами контроля сил, воздействующих на трубопровод со стороны роликов нижнего направляющего устройства. Трубопровод опускают по узлу вытянутой вверх вышки судна, пропускают через группы разнесенных роликов нижнего направляющего устройства, посредством которых ограничивают боковые пределы трассы трубопровода, осуществляют его изгиб при его прохождении через нижнее направляющее устройство и контролируют силы, воздействующие на трубопровод со стороны роликов нижнего направляющего устройства. Расширяет арсенал технических средств. 2 с. и 27 з.п. ф-лы, 17 ил.
| СИСТЕМА ПЕРФУЗИИ ДЛЯ КУЛЬТИВИРОВАНИЯ КЛЕТОК | 1992 |
|
RU2118360C1 |
| Способ контроля работы скачкового механизма в киноаппаратуре | 1977 |
|
SU661488A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| RU 94040089 A1, 27.03.1997. | |||

