Изобретение относится к области передачи информации и может быть использовано для обеспечения скрытой связи и обнаружения объектов под водой.
Известен способ работы устройства для измерения параметров водной среды, включающий формирование канала связи кабелем-тросом и последующую передачу по нему информации [1].
Недостатком такого способа является низкая мобильность при формировании канала, а также необходимость закрепления канала на объектах, между которыми осуществляется связь, что ограничивает перемещение этих объектов друг относительно друга.
Прототипом является способ работы гидролокатора для оптико-акустического обследования подводного объекта, включающий формирование лазерного луча с полой сердцевиной, формирование им в среде звукопроводного канала и передачу по нему звуковых сигналов [2].
Недостатками этого способа является возможность передачи по каналу только звуковых сигналов, что ограничивает область его применения, а также сужает частотный диапазон передаваемых сигналов. Кроме того, скорость передачи сигналов по указанному каналу относительно невелика.
Целью изобретения является увеличение частотного диапазона и скорости передачи информационных сигналов в жидкой среде, а также расширение вида передаваемых сигналов.
Эта цель достигается тем, что в способе передачи информации в жидкой среде, включающем выполнение лазерного луча, формирование им путем локального нагрева жидкой среды канала и передачу по последнему информационных сигналов, нагрев среды осуществляют до появления резких границ, обозначающих канал, и получения на них парообразной фазы. В канале распространяют сигнал в виде электромагнитной волны. Формируют канал переменного сечения, передаваемую по каналу информацию используют для передачи сообщений. Кроме того, передаваемую по каналу информацию используют на его выходе для имитации.
Предлагаемый способ включает в себя операции:
- нагрев среды осуществляют до появления резких границ, обозначающих канал, и получения на них парообразной фазы;
- в канале распространяют сигнал в виде электромагнитной волны;
- формируют канал переменного сечения;
- передаваемую по каналу информацию используют для передачи сообщений, а также для имитации.
Указанные операции позволяют достичь по сравнению с прототипом следующих преимуществ.
Формирование канала путем локального нагрева среды до появления резких границ, обозначающих канал, позволяет получить искусственный волновод (подводный канал связи).
Распространение вдоль границ канала сигнала, несущего информацию, способствует его малому затуханию, поскольку канал ограничен сверху и снизу слоями, в которых происходит полное внутреннее отражение сигнала. Если в канале распространяют сигнал в виде звуковой волны, то распространение происходит без потерь акустической энергии, что, во-первых, обеспечивает минимальное ослабление звуковой волны с расстоянием, а во-вторых, позволяет использовать маломощный акустический излучатель. Это, в свою очередь, затрудняет пеленгование подводного объекта и несанкционированное получение передаваемой информации.
Нагрев среды до появления на границе парообразной фазы способствует продуцированию пара. Образующийся пар высокого давления увеличивает сечение волновода и делает внутри последнего среду значительно меньшей плотности. Это позволяет распространять в канале сигнал в виде электромагнитной волны, скорость распространения которой в 200000 раз больше скорости распространения звука в воде. Заметим, что паровые пузыри, поднимаясь к поверхности, быстро охлаждаются и охлопываются, а поэтому не могут быть обнаружены на поверхности воды.
Формирование канала переменного сечения дает возможность увеличить панорамный обзор при обнаружении объектов под водой, а также улучшить обратное прохождение по каналу сигнала при эхолокации.
Использование передаваемой по каналу информации для передачи сообщений и определения наличия подводного объекта позволяет организовать связь между объектами. Использование передаваемой по каналу информации на его выходе для имитации дает возможность получить источник звука, например шума винтов подводной лодки, удаленный на определенное расстояние от настоящего источника этого шума, т.е. получить (сформировать ложную цель).
Изобретение поясняется чертежами.
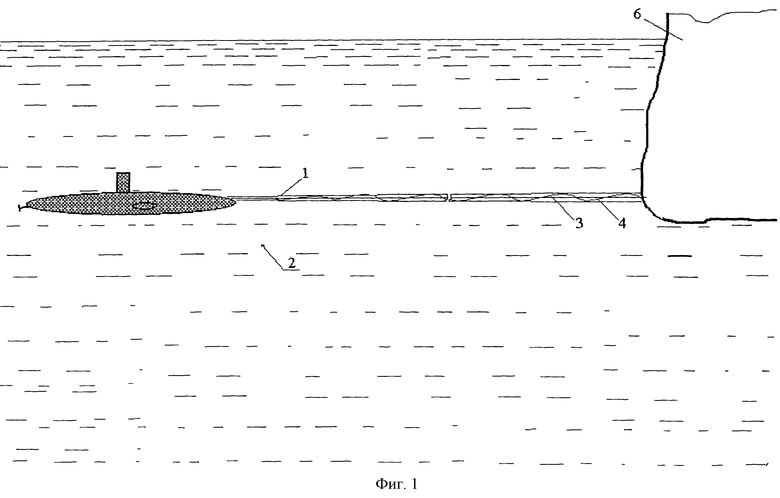
На фиг. 1 изображена схема формирования канала, посредством которого осуществляется обнаружение подводных объектов.
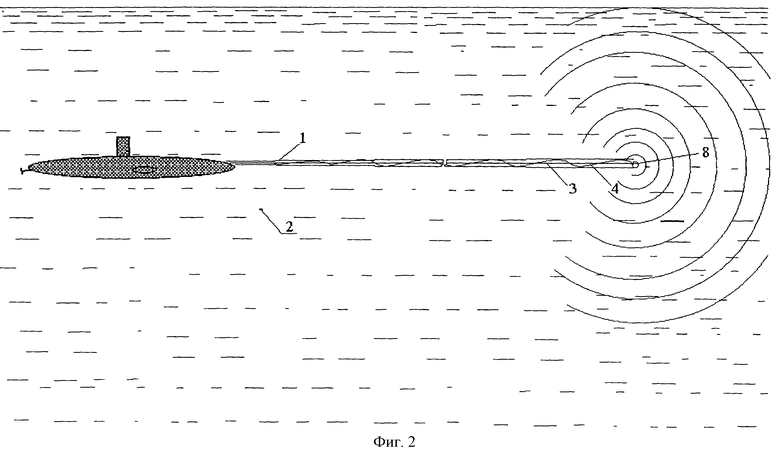
На фиг. 2 изображена схема получения источника звука, удаленного от объекта формирования канала.
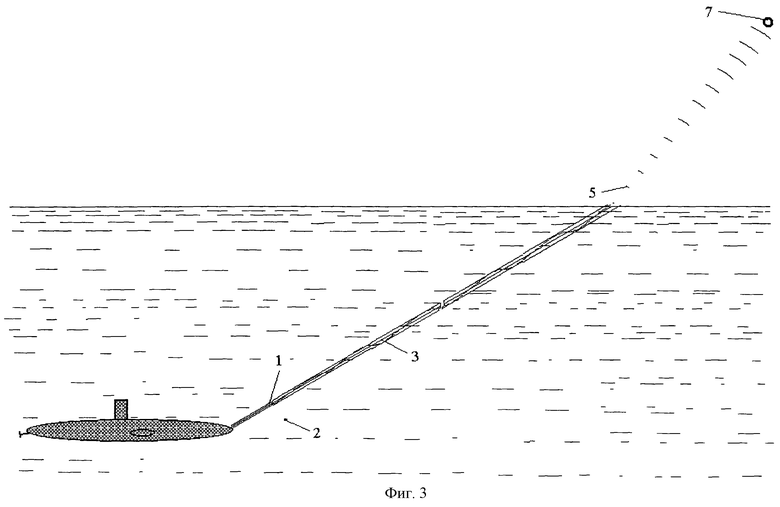
На фиг. 3 изображена схема формирования канала, посредством которого осуществляется передача информации.
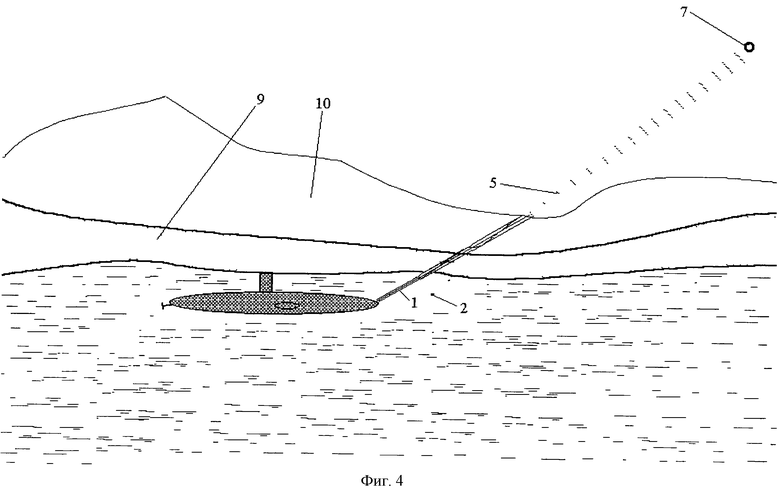
На фиг. 4 изображена схема формирования канала, посредством которого осуществляется передача информации из подо льда.
Канал 1 (искусственный волновод) формируют в среде 2 (например воде) путем локального нагрева ее лучом 3 лазера. В канале распространяют акустическую 4 или электромагнитную 5 волны, которые взаимодействуют с подводным объектом 6 или надводным 7. На выходе канала может быть сформирован источник 8 звука. Поверхность воды может быть покрыта толщью льда 9 и снега 10.
Способ реализуют следующим образом.
Производят локальный нагрев среды 2 посредством луча 3 лазера. В результате этого образуется канал 1 (искусственный волновод), вдоль которого распространяют несущий информацию сигнал в виде акустической волны 4 (фиг.1). Если на пути сигнала встретится подводный объект 6, то сигнал отразится от него и возвратится по каналу обратно. Получение эхосигнала свидетельствует о наличии подводного объекта, расстояние до которого можно вычислить по времени между моментом посылки сигнала и моментом приема эхосигнала.
Если на пути распространяемого по каналу 1 сигнала никакого препятствия не окажется, то он постепенно затухнет, выйдя из канала. Для уменьшения расстояния, на котором происходит затухание сигнала, по волноводу можно распространять сигнал в виде электромагнитной волны, которая, выйдя из канала, распространится в воде на несколько десятков метров. Однако для уменьшения затухания этой волны непосредственно в самом канале необходимо уменьшить плотность среды в нем путем испарения жидкой фазы в канале. При этом на границе волновода появляется парообразная фаза. Поскольку давление насыщенных паров воды достаточно велико, то даже на больших глубинах образующийся пар высокого давления будет расширять сечение волновода, способствуя тем самым лучшему прохождению электромагнитной волны.
Если по волноводу (фиг.2) пустить звуковую волну от мощного источника, имитирующего, например, шум винтов подводной лодки, то звуковая волна при выходе из канала, в котором она испытывала полное отражение, будет распространяться в водное пространство на большое расстояние. При этом положение источника шума 8 будет определяться местонахождением в данный момент времени выходной части канала 1. Это обстоятельство может быть использовано для маскировки истинного положения объекта (например подводной лодки), с которого осуществляется формирование канала 1. В случае пеленгования в пассивном режиме источник шума будет определен по координатам выходной части канала 1, при этом сама подводная лодка запеленгована не будет.
Для передачи информации производят локальный нагрев среды 2 посредством луча 3 лазера, который направляют к поверхности (фиг. 3). Вдоль получившегося канала посылают информационный сигнал (например, в виде электромагнитной волны 5), который может быть принят надводным объектом 7 (спутником). При этом для сужения диаграммы направленности распространяемого над водой сигнала длина электромагнитной волны должна находиться в оптическом диапазоне излучения. Кроме того, передача информации с помощью лазера дает возможность организовать двухстороннюю передачу сообщений (по принципу работы лазерного дальномера). Заметим, что подобным образом информационный сигнал может быть послан непосредственно из подо льда, однако в этом случае подводный объект, формирующий канал связи, должен быть зафиксирован относительно канала, который образуется в толще льда.
Таким образом, с помощью предлагаемого способа можно производить обнаружение подводных объектов в активном скрытном режиме, передавать защищенную от несанкционированного использования информацию, находясь под водой или подо льдом, а также при необходимости имитировать различные шумы вдалеке от истинного источника шума.
Внедрение изобретения улучшит маскировку атомных подводных лодок и позволит производить передачу информации из подводного положения, что, в конечном счете, повысит их боеспособность.
Источники информации
1. А.с. СССР №1430977, кл. G 08 С 19/32, 1988 - аналог.
2. Патент №2141676 РФ, G 01 S 3/80, 1999 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДВУСТОРОННЕЙ СВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 1998 |
|
RU2134023C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫСОКОСКОРОСТНОГО КАНАЛА СВЯЗИ МЕЖДУ ПОДВОДНЫМ И НАДВОДНЫМ ОБЪЕКТАМИ | 2019 |
|
RU2724978C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ ОТПУГИВАНИЯ ПТИЦ | 2009 |
|
RU2394425C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ ИСТОЧНИКОВ, ПРОЦЕССОВ И ЯВЛЕНИЙ АТМОСФЕРЫ, ОКЕАНА И ЗЕМНОЙ КОРЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2602763C2 |
| Способ связи подводного аппарата с летательным аппаратом | 2020 |
|
RU2733085C1 |
| РАДИОГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН ИСТОЧНИКОВ И ЯВЛЕНИЙ АТМОСФЕРЫ, ОКЕАНА И ЗЕМНОЙ КОРЫ В МОРСКОЙ СРЕДЕ | 2015 |
|
RU2593673C2 |
| ОПТИКО-АКУСТИЧЕСКИЙ ГИДРОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ БЕСШУМНЫХ ПОДВОДНЫХ ЦЕЛЕЙ В РЕЖИМЕ ПАССИВНОЙ ГИДРОАКУСТИКИ | 1997 |
|
RU2115938C1 |
| ГИДРОЛОКАТОР ДЛЯ ОПТИКО-АКУСТИЧЕСКОГО ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 1997 |
|
RU2141676C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПАРАМЕТРИЧЕСКОЙ АНТЕННЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2550588C1 |
Изобретение относится к технике связи и может использоваться для скрытой связи и обнаружения объектов под водой. Технический результат заключается в оперативном формировании канала передачи информации, защита его от несанкционированного прослушивания и обеспечение возможности оперативного обнаружения объектов под водой. Для этого формируют канал в жидкой среде посредством лазера, распространяют вдоль границ канала сигнал, взаимодействующий с подводным объектом или надводным, соответственно, осуществляя эхолокацию или передачу информации. 9 з.п. ф-лы, 4 ил.
| ГИДРОЛОКАТОР ДЛЯ ОПТИКО-АКУСТИЧЕСКОГО ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 1997 |
|
RU2141676C1 |
| RU 99114812 А, 20.05.2001 | |||
| US 5070733 A, 10.12.1991 | |||
| US 5033034 А, 16.07.1991. | |||

