Изобретение относится к гидроакустическим навигационным способам и системам, конкретно, к подводным пассивным гидроакустическим навигационным системам большого радиуса действия.
Задачи глобального позиционирования, навигации и синхронизации времени (PNT) технических систем как для военных, так и для гражданских целей и приложений над водной и земной поверхностью, могут решать спутниковые радиочастотные системы позиционирования (ГЛОНАСС/GPS/Galileo/IRNSS/Compass/QZSS). Однако сигналы с радиочастотами, используемыми данными системами, не могут проникать в морскую воду на достаточную глубину и использоваться для позиционирования подводных объектов и устройств.
Подводные устройства и аппараты используют для навигации инерционные измерительные устройства (IMU), но они могут быть единственным средством для подводной навигации только в случае коротких по продолжительности миссий (в ограниченном по площади районе работ), так как накопленная ошибка инерциальной системы счисления в конечном итоге требует внешних коррекционных измерений для поддержания или восстановления точной работы.
Для решения проблемы подводного приема сигналов управления и навигации подводными объектами (подводными аппаратами), при работе на шельфе и в открытых районах Мирового океана без подъема подводных объектов на поверхность, предлагается использование лазерных каналов измерений и связи, с передачей сигналов со спутников на погруженный подводный объект (ПО) и обратно, с адаптацией этих каналов к влиянию метеофакторов и волнения моря (п.РФ №2390098 С2, МПК Н04В 11/01 (2006.1)]. Доставка информации на подводный объект и формирование для него подводного лазерного навигационного поля в заданном районе океана (площадью не менее десяти тысяч квадратных километров) осуществляется всеми спутниками, в зоне видимости которых находится обеспечиваемый район. Предполагается, что система, реализующая предлагаемый способ, может обеспечить достижение следующих тактико-технических характеристик информационно-координатного обеспечения: высота орбиты КА (системы ГЛОНАСС) - 19100 км; глубина погружения ПО при навигационно-связном сеансе - от 0 до 200 м; погрешность местоопределения ПО - до десяти метров; скорость передачи информации - до 1 кбит/с; оперативность связи при многоканальной связи через непрерывную облачность - от 5 до 10 с. Вес и энергопотребление устройств лазерной навигации и связи на спутнике максимально 80 кг и 1кВт, соответственно.
К недостаткам предлагаемой системы можно отнести высокую техническую сложность системы (и эксплуатационные расходы) за счет использования космической группировки специализированных спутников большой численности (для навигационного покрытия всей поверхности океана), а также использования береговой инфраструктуры для лазерной коррекции измерений. Соответственно, надежность всей системы будет определяться надежностью всех ее наземных элементов, а не только «подводной» ее частью. Указанная система не сможет выполнять своих функций для областей океана с сезонным ледовым покрытием, в условиях сильных поверхностных загрязнений или высокой плотности рассеивателей различных видов в приповерхностном слое океана. Необходимость обеспечения дуплексной связи между подводным объектом и спутниками, требует наличия соответствующей аппаратуры и источников ее электропитания на борту ПО, что ограничивает круг подводных объектов, исключая из него подводные устройства небольшого водоизмещения.
Известно, что низкое затухание акустических сигналов под водой позволяет использовать их при проектировании и создании разнообразных навигационных систем как по используемым сигналам, так и по решаемым задачам. Системы позиционирования и навигации большой дальности, как правило, используют схемы с длинной базой (LBL) и триангуляционные методики позиционирования, для которых определение дистанций между излучателями и подводными объектами, выполняется по измеренным временам распространения импульсных сигналов от акустических маяков приемоответчиков до подводных объектов.
Типичная синхронная дальномерная навигационная система с длинной базой имеет донную навигационную базу из М гидроакустических маяков-приемоответчиков с различными рабочими частотами ответа и размещаемые на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно и вычислитель координат объекта навигации [Милн П.Х. Гидроакустические системы позиционирования: Пер. с англ. - Л.: Судостроение. - 1989. - 272 с.]. Процесс позиционирования включает измерение времени распространения звукового сигнала от объекта навигации до маяков и обратно, вычислении дистанций между объектом навигации и маяками с учетом постоянства скорости звука в водной среде и последующего пересчета этих дистанций в координаты объекта навигации.
Однако, использование систем, основанных на измерении дистанций по времени распространения импульсных акустических сигналов в подводных каналах, сопряжено с рядом проблем. К ним относятся - изменяющиеся во времени многолучевое распространение сигналов и задержки импульсных сигналов при распространении по лучам, зональная структура акустического поля, ограничение частотной полосы пропускной способности каналов, межсимвольная интерференция, наличие экологических и техногенных шумов и т.п. Основным фактором, ограничивающим возможность известных навигационных систем с длинной базой в активном или пассивном режимах работы обеспечить надежное позиционирование неограниченного количества подводных объектов на больших по площади акваториях мирового океана, в конечном счете, является сложность обеспечить излучение импульсных навигационных сигналов с известными характеристиками, выполнить их прием и надежную идентификацию на подводном объекте на больших дальностях, что необходимо для определения дистанции до каждого маяка/излучателя по измеренным временам распространения импульсов.
Для увеличения дальности действия системы предложена гидроакустическая навигационная система, которая содержит навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа, гидроакустический приемопередатчик, аппаратуру измерения временных интервалов распространения сигналов п. РФ №2477497 С2, МПК 01SG 15/08 (2006.1)]. Часть из М гидроакустических приемоответчиков навигационной базы закреплена на морском дне, остальные установлены на водной поверхности и оснащены приемниками сигналов спутниковых радионавигационных систем. Антенна гидроакустического приемопередатчика выполнена с электронно-управляемой формой характеристики направленности, при этом управление формой характеристики направленности осуществляется с помощью навигационного вычислителя, число лучей характеристики направленности поддерживается равным числу маяков-ответчиков, а их ширина - обратно пропорциональной дистанциям соответствующих маяков ответчиков до объекта навигации.
Недостатком указанной системы является наличие в системе приемоответчиков, расположенных на поверхности, ввиду зависимости их работоспособности от погодных и климатических условий на поверхности (штормы, ураганы, волнение, наличие льда), а также угроза гибели, при работе в районах с развитым рыболовством и судоходством. Использование информации с GPS требует наличия и устойчивой работы данной системы в районах обеспечения подводной навигации. Использование фазированных решеток с управляемыми характеристиками направленности в качестве антенн приемопередатчиков возможно только на подводных аппаратах соответствующих размеров и является технически сложной задачей для небольших по водоизмещению подводных аппаратов. Наличие в схеме автономных приемоответчиков не позволяет, при необходимости, оперативно производить изменение режимов их работы, а также требуется их большое количество, для обеспечения глобальной навигации неограниченного числа подводных объектов.
Известно, что в глубоководном канале акустические сигналы могут распространяться на большие (~3500-4000 км) расстояния [Spiesberger J.L. and Tappert F.D. Kaneohe acoustic thermometer further validated with rays over 3700 km and the demise of the idea of axially trapped energy // J. Acoust. Soc. Amer. 1996, Vol. 99, P. 173-184].
Принципиальная возможность приема и идентификации акустических сигналов на дальности 3115 км продемонстрирована в эксперименте по излучению акустических сигналов с центральной частотой 75 Гц излучателем с глубины 818 метров, вблизи острова Кауаи (Гавайские острова) и приеме сигналов в заливе Аляска на горизонтальную, буксируемую на глубине 372 метра, антенну [Spiesberger J.L. Acoustic identification of a single transmission at 3115 km from a bottom-mounted source at Kauai // J. Acoust. Soc. Amer. 2004, Vol. 115 (4), April, P. 1497-1504].
В работе [Tappert F.D., Spiesberger J.L., Wofson M.A. Study of a novel range dependent propagation effect with application to the axial injection of signals from the Kaneohe source // J. Acoust. Soc. Amer. 2002, Vol. 111, №2., P. 757-762] приведены и проанализированы результаты эксперимента по переходу акустических сигналов из звукового канала мелкого моря в звуковой канал глубокого моря. Из результатов численного моделирования указанного эксперимента следует, что возможны два механизма такого перехода. Первый - это аналог «акустического оползня», когда поток акустической энергии от излучателя, расположенного на шельфе распространяется вдоль континентального склона и захватывается в глубоководный канал. Второй механизм имеет геометрическую природу и связан с процессом переотражения акустических лучей от поверхности и дна. В зависимости от среднего угла наклона дна часть переотраженных лучей также уходит глубоководный канал.
Похожие результаты приводятся в работе [Безответных В.В., Буренин А.В., Моргунов Ю.Н., Половинка Ю.А. Экспериментальные исследования особенностей распространения импульсных сигналов из шельфа в глубокое море // Акуст. журн., т. 55, №3, 2009, с. 374-380]. Экспериментально показано, размещение источника звука у дна на шельфе, вблизи береговой черты, позволяет сформировать в глубоком море, вблизи оси ПЗК, сплошную зону освещенности и стабильную импульсную характеристику, с двумя основными приходами акустической энергии, с углами близкими к нулевым, на расстояниях до 368 км.
В работе Акуличева В.А., Моргунова Ю.Н, Бородина А.Е. «Региональная система подводного навигационного обеспечения и дистанционного управления» (Фундаментальная и прикладная гидрофизика, №2, Т. 7, 2014, С. 36-40) предложен способ гидроакустической дальнометрии, который обеспечивает возможность разработки и создания нового поколения высокоточных гидроакустических навигационных систем (ГНС) с большим радиусом действия. Способ позволяет увеличить дальность действия ГНС, повысить точности позиционирования, расширить функциональность и повысить надежность ГНС. При реализации способа используются фазоманипулированные импульсные сигналы, излучаемые гидроакустическими маяками, размещенными вблизи побережья, с возможностью использования ГНС для передачи навигационных сигналов и команд управления на подводные средства (ПС), аппаратура которых работает только в режиме приема. В экспериментах 2004-2006 годов показано, что фазоманипулированные импульсные сигналы уверено принимаются на одиночный дрейфующий гидрофон на дистанциях, превышающих 500 км.
Предложен способ навигации подводных объектов (ПО) по навигационным маякам в двух режимах по дальности: меньше 20 км и больше 20 км до маяков (п. РФ №2469346 С1, МПК G01S 3/80). Изобретение относится к способам навигации подводных объектов, конкретно к способам определения местонахождения подводных автономных объектов (ПО) относительно гидроакустических маяков. Решаемые предлагаемым способом задачи - увеличение дальности действия и повышение точности способа позиционирования, а также расширение функциональности и надежности способа, обеспечиваются использованием в качестве излучаемого сигнала сложных сигналов низкочастотного диапазона, размещением гидроакустических излучателей вблизи побережья, а также работой акустического тракта ПО только в режиме приема.
В указанном способе размещают вблизи побережья на глубине, превышающей в 5-10 раз длину волны излучаемого гидроакустического сигнала, акустические маяки, работающие в низкочастотном диапазоне и излучающие сложные, преимущественно фазоманипулированные или частотно-модулированные сигналы с центральной частотой ниже 10 кГц. Координаты маяков и электронные копии излучаемых ими сигналов вводят в бортовую систему вычисления координат ПО. Вычисление координат ПО включает выделение бортовым устройством полезного сигнала акустических маяков посредством взаимно корреляционной обработки принятого сигнала с электронной копией излученного сигнала в реальном времени, при этом для дистанций, меньших 20 км, и условий мелкого моря выбирают первый по времени приход полезного сигнала, а для дистанций, больших 20 км, и глубокого моря - последний приход.
Известен способ позиционирования объекта в подводном канале и система большого радиуса действия для его осуществления, рассматриваемые нами в качестве наиболее близкого аналога (п. США №9013959 МПК G01S 3/80 (2006.1).
Способ включает в себя прием на объекте акустических сигналов, по меньшей мере, из двух источников, на частоте, соответствующей, по меньшей мере, одному волноводному режиму, связанному с подводным каналом, в котором в заданное время излучаются соответствующие акустические сигналы. Способ также включает в себя определение времени прихода, для принятых акустических сигналов, по меньшей мере, одной волноводной моды исходя из заданного времени излучения. Способ также включает в себя определение геофизического положения на основе времени прихода и групповой скорости, по меньшей мере, для одной волноводной моды.
Система акустического позиционирования в подводном канале включает, по меньшей мере, два источника для передачи акустических сигналов и приемник, расположенный на объекте для приема акустических сигналов, по меньшей мере, от двух источников. Каждый акустический сигнал имеет частоту, соответствующую, по меньшей мере, одному волноводному режиму, связанному с подводным каналом, в котором акустические сигналы излучаются в соответствующее заданное время передачи. Приемник включает в себя процессор для определения времени прихода, по меньшей мере, для одного волноводного режима из принятых акустических сигналов на основе соответствующих заданных времен излучения и для определения геофизического положения объекта в зависимости от времени распространения и групповой скорости моды, по меньшей мере, для одного волноводного режима. Используемые акустические сигналы представляют собой низкочастотные сигналы не более 500 Гц.
Однако, в известном методе и устройстве реализуют определение положения объекта только в акваториях с мелководным каналом (где глубина составляет около 200 м или менее) например, в областях континентального шельфа на дистанциях меньше 100 километров. Для позиционирования в каждом из принимаемых на ПО навигационных акустических сигналов выполняется выделение, определение и идентификация одной или нескольких волноводных мод с определением групповой скорости мод, с учетом профиля скорости звука для каждого источника и измеренных времен прихода мод в принятых акустических сигналах.
В рамках используемого в прототипе модового описания распространения акустических (навигационных) сигналов, для точного расчета параметров мод (номеров и групповых скоростей) и их идентификации в мелководных каналах, требуется дополнительная информация о профиле и геофизических параметрах дна вдоль трасс распространения излучатель-подводный объект и, в общем случае, знание горизонтальной изменчивости вертикального профиля скорости звука c(z) между всеми источниками и приемником. В зависимости от корректности задания указанных параметров, зависит точность расчета групповой скорости и, как следствие, горизонтальных дальностей до ПО. При этом, точность позиционирования используемыми методами триангуляции определяется точностью проведенного расчета горизонтальных дальностей.
Также в рамках данного метода, использующего модовое описание распространения навигационных сигналов для навигации в звуковом канале глубокого океана, при излучении сигналов из мелководного канала шельфовой зоны будет сложно выполнить точную идентификацию мод (с последующим определением их групповых скоростей) и определение времен приходов мод на подводный объект из-за процесса взаимодействия мод при распространении в области изменения глубин (в области свала). Изменение вертикальной структуры мод при распространении на больших дальностях снизит надежность их идентификации и значительно увеличит время расчетов, требуемые вычислительные ресурсы и определение точных групповых скоростей распространения сигналов и общую точность позиционирования.
Техническая проблема состоит в разработке пассивной дальномерной системы навигации в глубоком океане с обеспечением позиционирования и навигации подводных объектов на больших (500-2500 км) дальностях от излучателей навигационных сигналов и на больших по площади (~6.25×106 км2) акваториях с использованием небольшого числа излучателей, установленных в шельфовой зоне и/или зоне континентального свала.
Технический результат: точность и надежность измерения дистанций и подводного позиционирования объектов навигации на больших дальностях в глубоком океане, в том числе для изменяющихся условий окружающей среды, улучшение качества и стабильности характеристик навигационных/коммуникационных/управляющих сигналов, снижение и оптимизация мощности излучения и повышение эффективности работы излучателей дальномерных и/или навигационных систем.
Проблема решается заявляемым способом пассивного позиционирования и навигации подводного объекта, включающим излучение кодоимпульсных фазоманипулированных навигационных и информационных сигналов с частотой в диапазоне 50-200 Гц и длительностью от 10 до 100 с угловыми характеристиками направленности излучения в горизонтальной плоскости в соответствии с расположением требуемой пространственной области навигационного обеспечения, как минимум, тремя акустическими маяками, стационарно размещенными в зоне шельфа на дистанциях друг от друга, соизмеримых с дистанцией до подводного объекта, прием сигналов, как минимум, одной вертикальной измерительной антенной для каждого маяка, стационарно размещенной с известными координатами в области подводного звукового канала на границе глубокого моря, причем приемные акустические датчики антенн объединены с измерителями локальной скорости звука, определение положения оси подводного канала и вертикальных угловых характеристик рабочих навигационных сигналов, принимаемых на оси глубоководного звукового канала, излучение маяками выбранных рабочих навигационных сигналов, прием их расположенными на оси подводного звукового канала приемными акустическими датчиками каждой из антенн, определение времени приема, вертикального распределения скорости звука вдоль антенны, формирование и передача информационных сообщений на навигационный комплекс подводного объекта маяками, соответствующими антеннам, при этом маяки и антенны синхронизированы с эталоном времени; прием подводным объектом навигационных сигналов и информационных сообщений, как минимум, от трех маяков, выделение, определение и идентификация времен приходов импульсов в каждом из принимаемых навигационных сигналов в рамках лучевого приближения с учетом значений скорости звука вдоль вертикальной антенны и в точке приема подводным объектом, определение горизонтальных дистанций от вертикальных антенн до подводного объекта с учетом информационных сообщений и последующее позиционирование подводного объекта относительно вертикальных антенн методом триангуляции, и определение положения подводного объекта в пространстве с учетом географических координат антенн и глубины подводного объекта.
Проблема решается также заявляемой системой для пассивного позиционирования и навигации на больших дальностях, включающей как минимум, три размещенных стационарно в области шельфа маяка, излучающих кодоимпульсные фазоманипулированные навигационные и информационные сигналы и обладающих широкоугольной горизонтальной диаграммой направленности и управляемой диаграммой направленности в узком диапазоне углов в вертикальной плоскости, размещенных таким образом, чтобы горизонтальные расстояния между соседними маяками были соизмеримы с расстояниями до подводных объектов; береговые центры, соответствующие каждому из маяков, и, как минимум, для каждого маяка одну стационарно размещенную в месте с известными координатами вертикальную измерительную антенну, акустические приемные датчики которой объединены с измерителями локальной скорости звука, и снабженную блоком управления и калибровки, который содержит электронные блоки синхронизируемых высокоточных часов, обработки сигналов с вертикальной антенны, определения параметров рабочих навигационных сигналов, измерения вертикального распределения скорости звука вдоль антенны, расчета времени распространения навигационных сигналов от маяка до антенны и блок формирования информационных сообщений для каждого маяка; бортовой навигационный комплекс подводного объекта, включающий электронные блоки синхронизации времени, приема и первичной обработки кодоимпульсных фазоманипулированных навигационных, содержащих не менее одного импульса, соответствующего распространению сигнала по различным лучевым траекториям, и блока декодировки информационных сигналов, как минимум, от трех маяков, и вычислительного устройства, обеспечивающего вычисления координат подводного объекта, при этом береговые центры соединены энергообеспечивающим и информационным кабелем с маяками и антеннами, а информационными каналами с эталоном времени.
Предлагаемые способ и система пассивного гидроакустического позиционирования и навигации подводных объектов позволяет решить имеющуюся проблему с достижением заявленного технического результата.
Заявляемое изобретение иллюстрируется следующими рисунками.
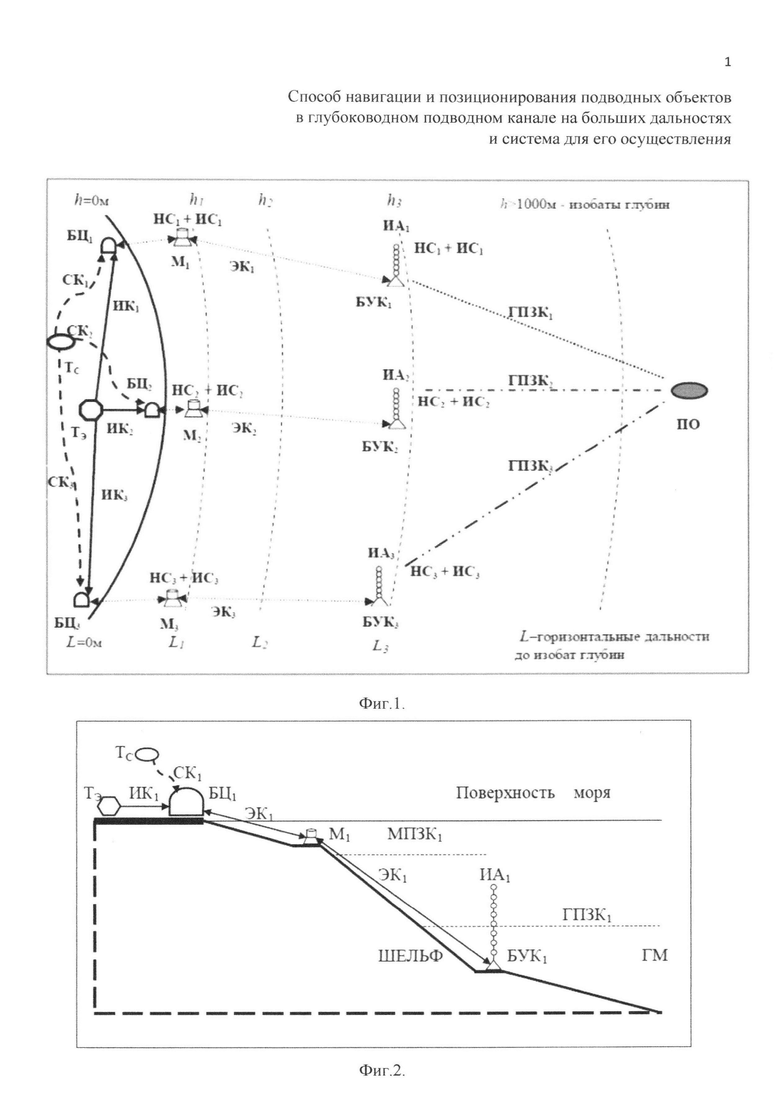
На Фиг. 1 приведена схема системы навигации большой дальности, где БЦ -береговой центр, Mi - навигационные маяк (излучатель), ИAi - измерительная антенна, БУЮ - блок управления и калибровки, ИCi - соответствующий маяку навигационный сигнал, ИСi - информационный сигнал, ЭКi - энергообеспечивающий и информационный кабель, ИКi - информационный наземный канал связи, CКi - спутниковый канал связи, ГПЗКi - направление оси глубоководного подводного звукового канала (индексы - i=1,2,3 порядковых номеров устройств и трасс связанных с соответствующим общим береговым центром); ТЭ - наземный эталон времени, Тс -спутниковый эталон времени, ПО - подводный объект позиционирования и навигации, h1, h2, h3 - изобаты глубин и L1, L1, L1 - горизонтальные дальности до изобат глубин, соответственно.
На Фиг. 2 представлен комплекс излучения навигационных и информационных сигналов, где i=1; МПЗК1 - ось подводного звукового канала мелкого моря, ГПЗК1 - ось глубоководного подводного звукового канала; ГМ - область глубокого моря, ШЕЛЬФ -шельфовая зона.
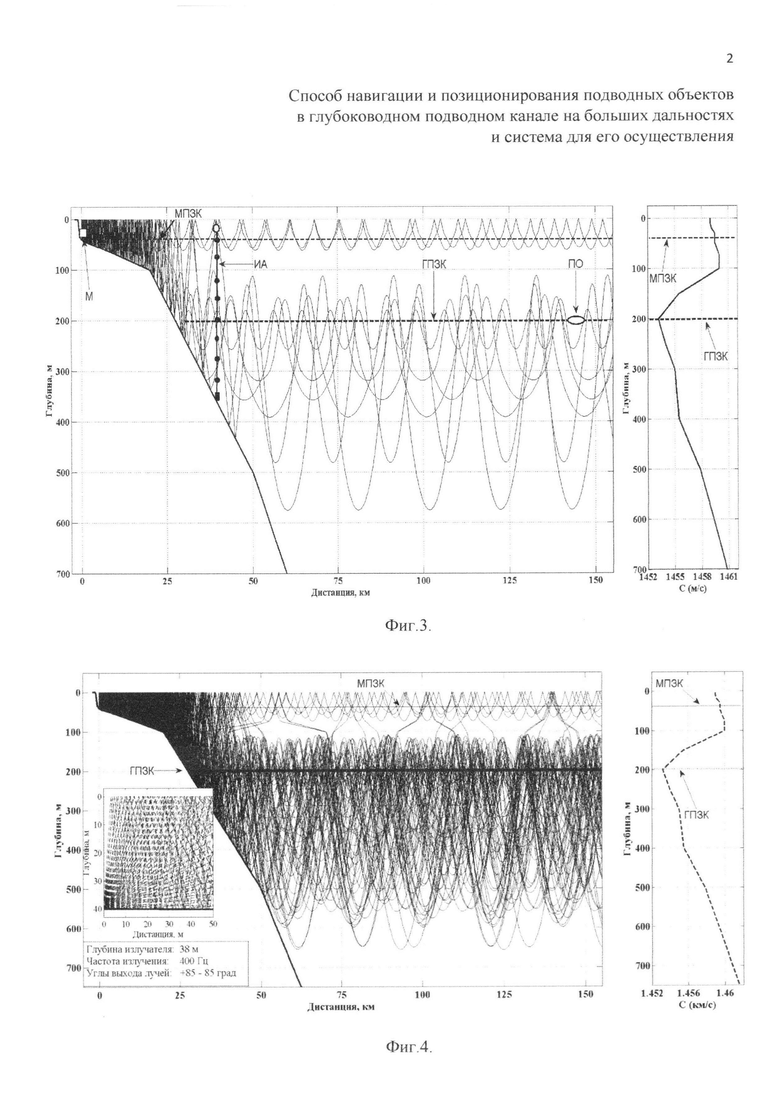
На Фиг. 3. представлена схема размещения маяка (М) и измерительной антенны - (ИА), подводного объекта (ПО) для позиционирования, с профилем дна (левая панель) и вертикальный профиль скорости звука (правая панель) для численных расчетов в рамках лучевого описания при моделировании.
На Фиг. 4. представлены результаты численных расчетов лучевых траекторий при моделировании работы навигационной системы в режиме ненаправленного (углы выхода лучей от +85 до -85 градусов) излучения в вертикальной плоскости (левая панель) и распределение, вдоль трассы, скорости звука по глубине (правая панель).
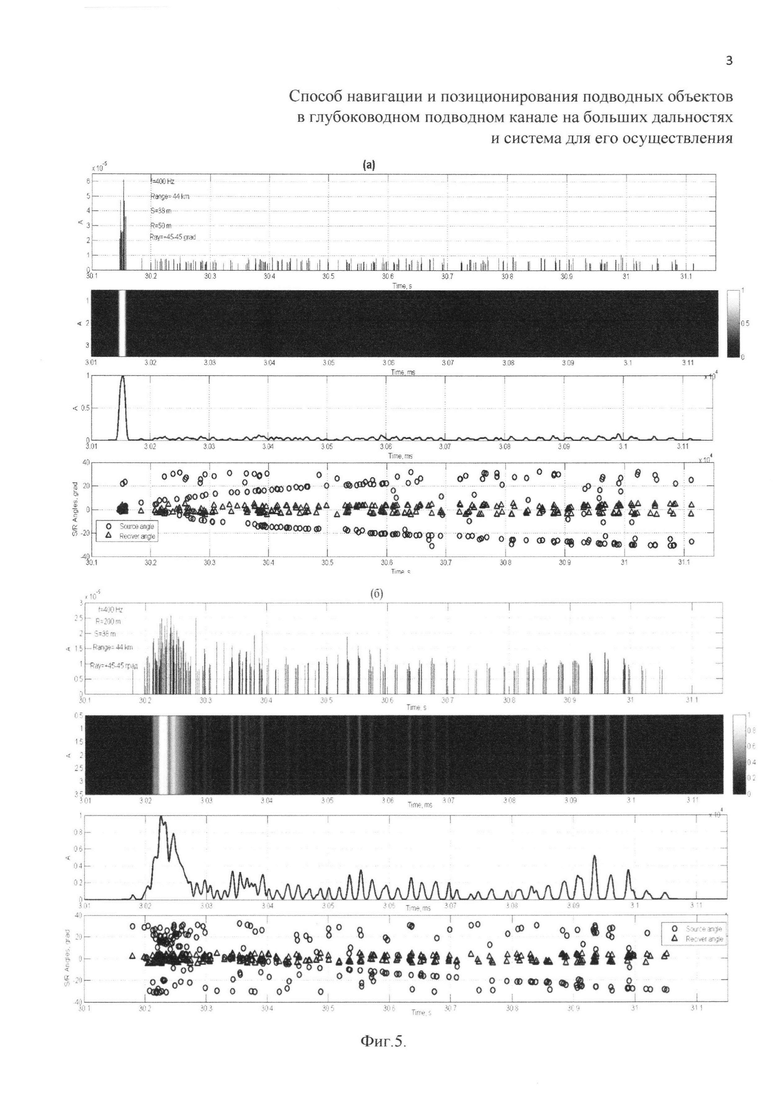
На Фиг. 5. представлены результаты численных расчетов амплитуд, времен прихода и углов выхода/прихода при ненаправленном излучении сигналов: (а) - в области приповерхностного ПЗК, глубина приемника 50 м, (б) - глубина приемника 200 м (область глубоководного канала).
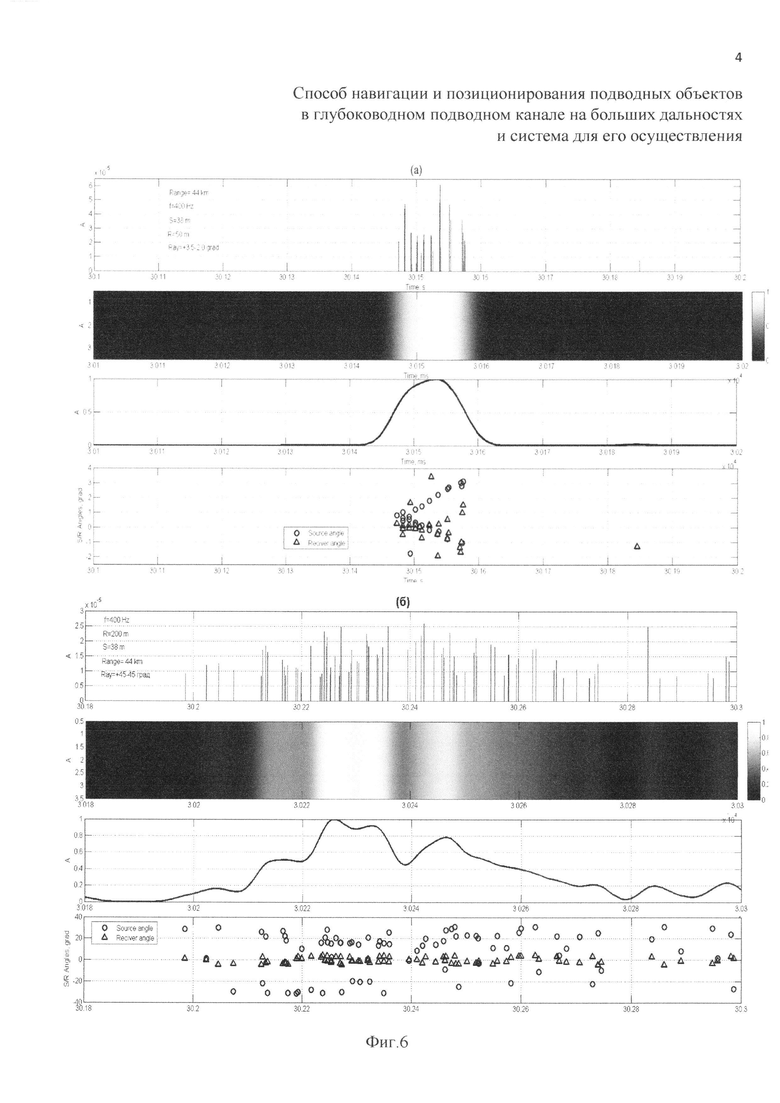
На Фиг. 6 приведены результаты расчета параметров сигналов с максимальными амплитудами для глубин приема: (а) - 50 метров и (б) - 200 метров.
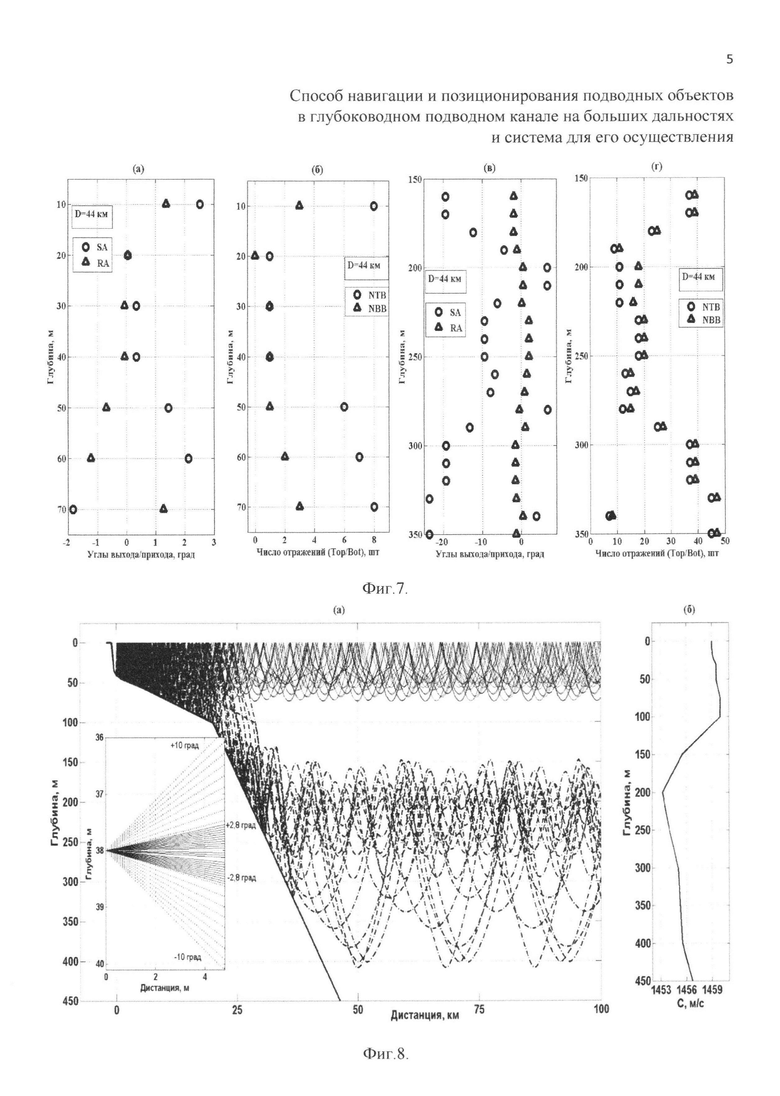
На Фиг. 7 приведены результаты модельного расчета значений углов выхода/прихода (SA/RA): (а) - диапазон глубин 10-70 метров, (в) - диапазон глубин 150-350 метров, а также число отражений от верхней и нижней границ волноводов (NBB и NTB): (б) - диапазон глубин 10-70 метров, (г) - диапазон глубин 150-350 метров, для сигналов, излучаемых из места установки маяка М и принимаемых на дистанции установки ИА, для случая ненаправленного излучения.
На Фиг. 8. представлены результаты численного моделирования двух режимов излучения навигационных сигналов из района установки маяка М: (а) - диапазоны вертикальных углов выхода для лучей в приповерхностном канале 0-70 м (углы выхода от+2,8 до -2,8 градуса) и в глубоководном 150-350 м канале (углы выхода в интервале от -3 до -10 и от +3 до +10 градусов) и (б) - распределение скорости звука по глубине
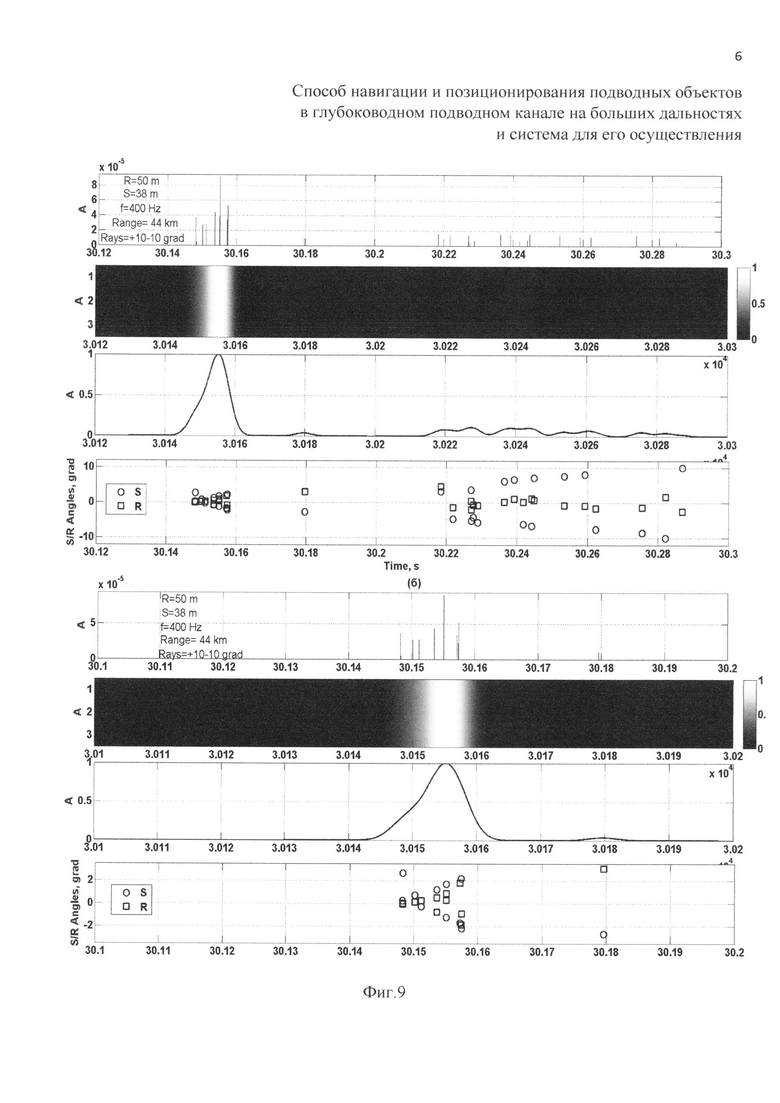
На Фиг. 9. приведены результаты расчета амплитуд, времен прихода, а также углов выхода и прихода сигналов для ИА на дистанции 44 км и глубины приема 50 м (в области приповерхностного звукового канала) при направленном излучении сигналов маяком М (диапазон углов от +10 до -10 градусов): (а) - все приходы, (б) - приходы с максимальными амплитудами.
На Фиг. 10 приведены результаты расчета амплитуд (1-я, 2-я и 3-я панели) и их времен прихода, а также углов выхода и прихода сигналов (4-я панель) для ИА на дистанции 44 км и глубине приема 200 м (в области глубоководного звукового канала) при направленном излучении в диапазоне углов выхода от +10 до -10 градуса для группы приходов сигналов с максимальными амплитудами
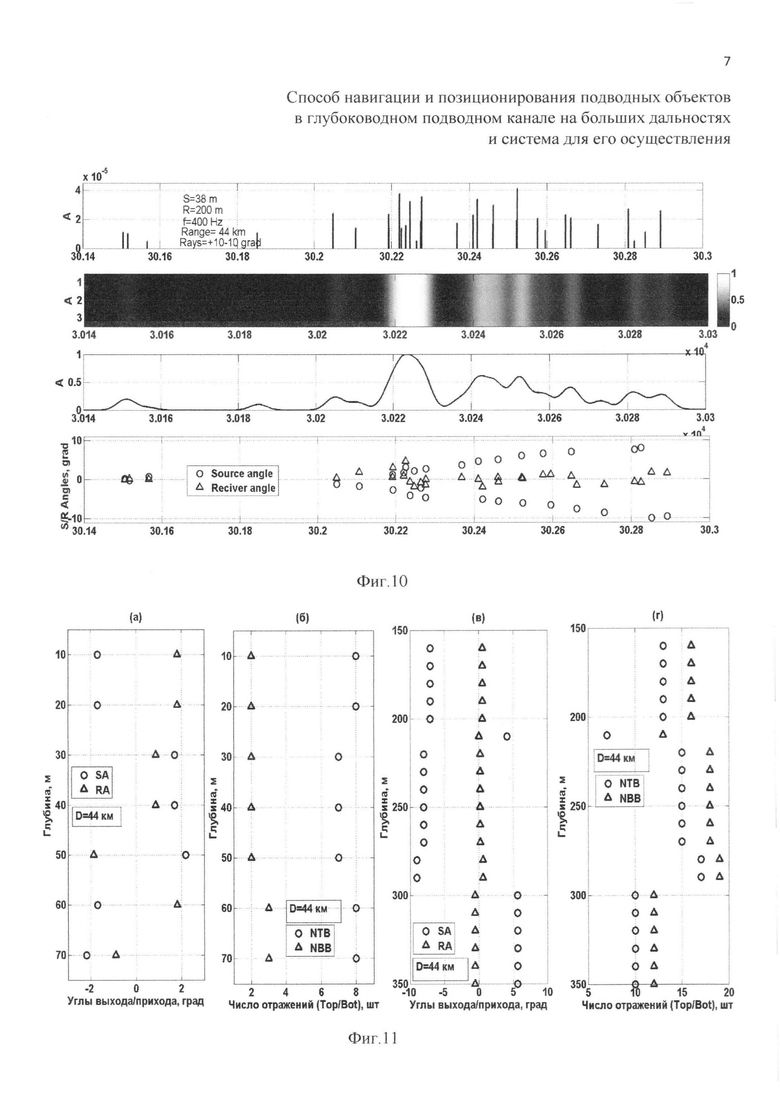
На Фиг. 11. приведены рассчитанные на дистанции установки ИА параметры сигналов при направленном излучении в приповерхностном канале 0-70 м (утлы выхода от +2,8 до -2,8 градуса) и в глубоководном 150-350 м канале (углы выхода от -3 до -10 и от+3 до+10 градусов). Углы выхода/прихода (SA/RA): (а) - для диапазона глубин 10-70 м, (в) - для диапазона глубин 150-350 м. Число отражений от дна и поверхности (NBB и NTB): (б) - для диапазона глубин 10-70 м и (г) - для диапазона глубин 150-350 м
На Фиг. 12. представлена схема позиционирования ПО согласно заявляемому методу, где
M1, М2; М3, - маяки, HC1(t0), HC2(t0), HC3(t0) - излучаемые маяками рабочие навигационные сигналы в момент времени t0; ИА1, HA2, ИА3, - измерительные антенны и P1(λ1, φ1, z1), P2(λ2, φ2, z2]), Р3(λ3, φ3, z3) координаты антенн в пространстве, HC1(t1), HC2(t2), НС3(t3) - рабочие навигационные сигналы регистрируемые измерительными антеннами в моменты времени t1, t2, t3, HC1(t1+Δ), HC2(t2+Δ), ИС3(t3+Δ) - излучаемые маяками, с задержкой повремени Δ относительно навигационных сигналов HC1(t1), HC2(t2), НС3(t3) соответственно, информационные сигналы, HC1(t11), HC1(t22), HC1(t33), - рабочие навигационные сигналы регистрируемые на ПО в моменты времени t11, t22, t33; P(λ,φ,z) - определяемые координаты ПО в пространстве, r1, r2 и r3 - горизонтальные дистанции.
На Фиг. 13. приведены сезонные среднестатистические распределения скорости звука по глубине в Японском море.
Заявляемая система навигации и позиционирования подводных объектов (Фиг. 1) размещается в районах шельфа (L1-L3), прилегающих к глубоководной области океана (L>L3). Здесь стационарно устанавливаются, как минимум, три комплекса излучения навигационных сигналов, каждый из которых состоит из берегового центра управления (БЦ), причем все береговые центры соединены с помощью соответствующих каналов связи с используемыми эталонами времени (спутниковым (Тс) или наземным (Тэ) и энергообеспечивающим и информационным кабелем (ЭК) с излучателем (М) навигационных (НС) и информационных сигналов (ИС).
Для управления излучением каждого навигационного маяка на границе шельфа и глубокого моря (ГМ) в области подводного звукового канала стационарно устанавливается как минимум одна многоэлементная вертикальная измерительная антенна (ИА), снабженная блоком управления и калибровки (БУК), соединенная энергообеспечивающим и информационным кабелем (ЭК) с излучателем (М) и береговым центром (БЦ). Гидрофоны антенны объединены с измерителями локальной скорости звука. Блок управления и калибровки (БУК) содержит устройство регистрации сигналов от маяков, вычислительное устройство для цифровой обработки принимаемых сигналов и устройство обмена информацией по кабелю с БЦ.
Линейные размеры антенн и количество приемных акустических датчиков и измерителей локальной скорости звука определяются ее пространственным расположением и достаточностью для контроля сигналов на оси глубоководного подводного звукового канала (ГПЗК) при возможных вертикальных вариациях оси ГПЗК.
Основными техническими требованиями к каналам связи являются: обеспечение заданной скорости передачи данных, защита от несанкционированного доступа, защищенность от механических и технических угроз и внешних воздействий, обеспечение передачи сигналов с требуемыми характеристиками.
Работа заявляемой гидроакустической системы навигации начинается с выбора параметров рабочих навигационных сигналов HC1, НС2 и НС3 на оси глубоководного ПЗК, по критерию максимального уровня амплитуды и минимального времени реверберации при приеме соответствующими датчиками измерительных антенн, например, используя способ, который за счет обнаружения и исправления ошибок в принимаемых блоках данных и селективного измерения амплитудно-временных параметров импульсных сигналов позволяет надежно и точно проводить селективные измерения амплитуд и времен приходов импульсов во времени (п. РФ №2577561 С1, опубл. 20.03.2016).
Периодичность выбора рабочих параметров излучения определяется временными характеристиками долгосрочной изменчивости во времени водной среды в районе установки маяков и измерительных антенн, а также характером вариаций оси ГПЗК в области навигации ПО. Выбор рабочих параметров излучения дополнительно потребуется также в случае внесения изменений в характеристики приемно-излучающих технических систем и/или при изменении их положения в пространстве.
В качестве рабочих навигационных и информационных сигналов, используются кодоимпульсные фазоманипулированные сигналы, например, на основе м-кодов, кодов Голда и подобных им, с частотой в диапазоне от 50 до 200 Гц и длительностью от 10 до 100 секунд. За счет большой длительности и согласованной корреляционной обработки данные характеристики используемых излучаемых сигналов позволяют получить увеличение соотношение сигнал/шум для принимаемых импульсных акустических сигналов на 7-15 дБ и увеличить рабочую дальность по сравнению с тональными импульсами. Использование таких сигналов также приводит к увеличению точности измерения времени распространения импульсов в водной среде и обеспечивает передачу на подводный объект (ПО) в кодоимпульсном режиме излучения в ограниченном частотном диапазоне необходимый для точного позиционирования объем информации. Частота заполнения и длительность навигационных сигналов определяется индивидуально для каждого маяка в зависимости от требуемой максимальной дальности действия системы навигации и от геофизических параметров окружающей среды в районе установки маяка и области работы ПО.
Сигналы излучаются в заданных горизонтальных и вертикальных диапазонах углов за счет механического и/или электронного способа формирования диаграммы направленности. Информация по характеристикам сигналов и режимам излучения вводится в блок памяти ПО перед началом выполнения миссии. Указанные параметры не изменяются, либо изменяются синхронно с соответствующими изменениями данных в памяти ПО в процессе выполнения миссии аппарата.
В бортовом навигационном комплексе ПО в электронной форме хранится информация о географических координатах, навигационные географические карты и карты глубин, базы среднестатистических данных поля скорости звука на заданной пространственной сетке для заданного периода времени в районе позиционирования и навигации ПО.
После излучения рабочего навигационного сигнала каждым маяком с заданной задержкой по времени, выполняют излучение от каждого маяка соответствующего сигнала с информационным сообщением, принимаемым на ПО и содержащим измеренные данные локальной скорости звука датчиками измерительной антенны ИА (вертикальное распределении скорости звука в глубоководном подводном звуковом канале - ГПЗК) и измеренные характеристики НС сигнала на оси ГПЗК, принятые соответствующими датчиками (гидрофонами) на оси ГПЗК. Информационные сигналы также содержат данные о точном времени измерения импульсной структуры НС соответствующим датчиком ИА.
Рабочие навигационные сигналы HC1, НС2 и НС3 распространяются вдоль трасс ЭК1, ЭК2 и ЭК3 по шельфу и далее (Фиг 1 и Фиг. 2.) в глубоководных подводных звуковых каналах ГПЗК1, ГПЗК2 и ГПЗК3, соответственно до ПО. На границе шельфа и глубоководной части района позиционирования сигналы принимаются и регистрируются датчиками антенн ИА1, ИА2 и ИА3 С помощью аппаратуры блока управления и калибровки антенны выполняются измерения функций отклика каналов с привязкой результатов к измеряемому вертикальному распределению скорости звука по глубине в месте установки антенн.
Выбор параметров рабочих навигационных сигналов (настройка) всех маяков выполняется известными способами как синхронно в заданное время t0, так и индивидуально во времени, по мере изменений условий распространения или состава технических средств в каждом конкретном случае. Параметрами сигналов являются: амплитуда сигнала - Р, частота заполнения импульса - f, число символов - n, используемых для кодировки, и число периодов рабочей частоты на передаваемый символ - k. При этом длительность импульсного сигнала может варьироваться как за счет использования последовательностей с большим или меньшим числом символов n, так и за счет увеличения числа периодов рабочей частоты - k на передаваемый символ. При выборе рабочих навигационных сигналов для каждого маяка используются индивидуальные (уникальные) кодоимпульсные сигналы.
В момент времени to производится ненаправленное излучение (излучение с круговой диаграммой направленности в вертикальной и горизонтальной плоскости) первого сигнала настройки {s01} маяком M1 (Фиг. 2). Первый сигнал {s01}, излученный в момент времени t0 распространяется в водной среде вдоль трассы ЭК1, в момент времени - t11 принимается акустическими датчиками антенны ИA1 в виде S1k суммы реплик излученного сигнала и регистрируется с помощью блока управления и калибровки БУК1:

здесь коэффициенты  - представляют собой амплитуды импульсов, соответственно распространяющихся вдоль траекторий
- представляют собой амплитуды импульсов, соответственно распространяющихся вдоль траекторий  собственных лучей от Mi до приемных датчиков ИА1. Принятые сигналы регистрируются с помощью аппаратуры БУК1. Одновременно с регистрацией сигналов, выполняются измерения вертикального профиля скорости звука вдоль антенны с помощью локальных измерителей скорости звука. Результаты измерений принятых акустических сигналов и значения вертикального профиля скорости звука передаются из БУК1 по кабелю ЭК1 в БЦ1.
собственных лучей от Mi до приемных датчиков ИА1. Принятые сигналы регистрируются с помощью аппаратуры БУК1. Одновременно с регистрацией сигналов, выполняются измерения вертикального профиля скорости звука вдоль антенны с помощью локальных измерителей скорости звука. Результаты измерений принятых акустических сигналов и значения вертикального профиля скорости звука передаются из БУК1 по кабелю ЭК1 в БЦ1.
Дополнительно для выбора параметров рабочих навигационных сигналов (настройки) всех маяков в рамках лучевого описания выполняют численное моделирование амплитудно-временных характеристик навигационных сигналов с использованием данных локальных измерений скорости звука датчиками измерительных антенн в соответствии со схемой размещения маяка и измерительной антенны, а также профилем дна в районе установки маяка (М) и антенны (ИА) (Фиг. 3).
В рамках данной схемы выполняют расчет лучевых траекторий при ненаправленном акустическом излучении сигналов маяком М (диапазон углов выхода лучей от +85 до -85 градусов) в вертикальной плоскости (Фиг. 4).
Для профиля звука в районе навигации, приведенного на правой панели Фиг. 4, характерно наличие двух ПЗК, приповерхностного мелководного в диапазоне глубин 0-70 м и глубоководного в диапазоне глубин 150-550 м. В обоих ПЗК наблюдается дальнее распространение звука, что позволяет решать поставленную задачу и обеспечить в них навигацию ПО, используя схему измерения времени распространения импульсных сигналов.
Выбор рабочих параметров НС1 для указанного района выполняется путем расчета времен прихода и углов выхода/прихода сигналов при ненаправленном излучении сигналов маяком M1 и приеме сигналов акустическими приемниками ИА1, расположенной на дистанция 44 км от излучателя (в области приповерхностного ПЗК, глубина приемника 50 м) и для глубины приемника 200 м (в области глубоководного канала) (Фиг. 5).
Допустимые параметры навигационных сигналов по результатам моделирования (Фиг. 5) имеют значения: диапазон углов выхода больше от +45 градусов до -45 градусов; общее время реверберации при приеме в указанном диапазоне углов излучения сигналов составляет порядка 1 секунды для глубины приема 50 метров, Фиг. 5(a) и 0,85 секунды для глубины приема 200 метров (Фиг. 5(б).
Сигналы с максимальными амплитудами, Фиг. 5(a), параметры которых могут использоваться в качестве рабочих HC1, имеют время реверберации порядка 10 мс. Сигналы с максимальными амплитудами, параметры которых можно использовать при задании рабочих НС1 в глубоководном ПЗК, имеют время реверберации порядка 120 мс, Фиг. 5(6).
Для уточнения и детализации выбираемых параметров рабочих навигационных сигналов рассчитывают параметры навигационных сигналов с максимальными амплитудами для глубин приема 50 и 200 метров, Фиг. 6. Диапазон углов выхода у сигналов с максимальными амплитудами составляет от +3,5 до -2 градусов на глубине приема 50 метров и от +30 до -30 градусов при приеме на глубине 200 метров.
Для области возможных глубин позиционирования в каждом конкретном ПЗК определяют параметры навигационных сигналов путем расчета значений углов выхода/прихода, а также числа отражений от верхней и нижней границ волноводов для сигналов, излучаемых из места установки маяка М1 и принимаемых на дистанции установки ИА1, для случая ненаправленного излучения, Фиг. 7.
В рассматриваемом случае, диапазон глубин позиционирования по вертикали и диапазон углов выхода HС1 в приповерхностном канале, Фиг. 7(a), составляет от 10 до 70 м и от -2,8 до +2,8 градусов, соответственно. Для глубоководного канала, Фиг. 7(в), это диапазон глубин составляет от 150 до 350 м и диапазоны углов излучения имеют значения от +3 до +10 и от -3 до -10 градусов. Приведенные на Фиг. 7(б) и Фиг 7(г), рассчитанные значения количества отражений от верхней и нижней границ, соответственно для приповерхностного и глубоководного волноводов, являются индикативным параметром: чем больше отражений испытывает сигнал, тем сложнее его амплитудно-временная структура и меньше амплитуда (и, как правило - соотношение сигнал/шум) в точках позиционирования.
Результаты численного моделирования распространения акустических сигналов для трассы ЭК1, с учетом предварительно измеренных антенной вертикального профиля скорости звука и профиля дна, представленные в графическом виде на Фиг. 4-7, позволяют реализовать выбор параметров излучаемых рабочих навигационных сигналов HC1 (то есть выполнить настройку маяка M1).
Технически настройка выполняется следующим образом. Проводится сравнение и идентификация результатов измерений функции отклика (времен прихода импульсных сигналов) в приповерхностном ПЗК и глубоководном ГПЗК с помощью систем ИА1, БУК1, M1, БЦ1 с рассчитанными (модельными) результатами (Фиг. 5 (а,б)). Если измеренные и рассчитанные функции отклика каналов не совпали (отрицательная идентификация), проводиться проверка и уточнение всех задаваемых параметров расчетной модели (Фиг. 3) и повторно измеряется функция отклика в приповерхностном и/или глубоководном акустических каналах и проводится моделирование по уточненным начальным данным. Указанная процедура проводится до положительной идентификации рассчитанных (модельных) времен приходов и приходов сигналов, зарегистрированных датчиками ИA1 в заданных ПЗК.
В случае положительной идентификации рассчитанных (модельных) времен приходов и приходов сигналов, зарегистрированных датчиками ИA1 в каждом из ПЗК по результатам расчетов, представленным на Фиг. 7, определяются и задаются диапазоны углов излучения маяка M1 в вертикальной плоскости для рабочего режима системы навигации.
Для рассматриваемых условий, выбранные сигналы позволяют обеспечить навигацию неограниченного количества ПО параллельно в обоих ПЗК с использованием излучения маяками рабочих навигационных сигналов в вертикальном диапазоне углов от +10 до -10 градусов. На Фиг. 8 приведены результаты расчета траекторий лучей для указанного режима в районе установки M1 - ИА1 и далее в районе навигации ПО подтверждающие сделанный выбор.
Характеристики рабочих навигационных сигналов: амплитуды, времена прихода, углы выхода и прихода сигналов для ИА1 (дистанция 44 км) и глубины приема 50 м в области приповерхностного звукового канала при направленном в диапазоне углов от +10 до -10 градусов излучении сигналов маяком Mi. в графическом виде, приведены на Фиг. 9.
Анализ результатов, приведенных на Фиг. 9 (а), свидетельствует о значительном уменьшении общего времени реверберации HC1 сигнала при приеме на глубине 50 м при направленном излучении по сравнению со случаем ненаправленного излучения (Фиг. 5(а)) - 1с и 0,14с, соответственно. Длительность сигнала максимальной амплитуды (по уровню максимальной амплитуды 0,7) составляет величину порядка 5 мс, фиг. 9(б) при направленном и 10 мс, фиг.5(б), при ненаправленном излучении, соответственно. Анализ результатов для глубины приема 200 м (в области глубоководного канала) при направленном излучении, в диапазоне углов выхода от +10 до -10 градуса, показывает, что длительность сигнала максимальной амплитуды (по уровню максимальной амплитуды 0,7) составляет величину порядка 5 мс, Фиг. 10(б) при направленном и 25 мс, Фиг. 5(б), при ненаправленном излучении, соответственно.
Модельные расчеты, приведенные на Фиг. 11, значений углов выхода/прихода и числа отражений от дна и поверхности для сигналов, излучаемых из места установки M1 и принимаемых на дистанции установки ИА1, для случая направленного излучения (Фиг. 8), подтверждают правильность выбора параметров навигационных сигналов в обоих ПЗК.
Задание горизонтальных углов направленности для рабочих навигационных сигналов производится исходя из схемы размещения маяков и положения береговой линии района навигации. Для случая, приведенного на Фиг. 1, диапазоны горизонтальных углов направленности для рабочих навигационных сигналов всех маяков будут порядка 180 градусов.
Выбранный рабочий HС1 (в процессе настройки маяка M1) имеет заявляемые преимущества перед ненаправленным излучением навигационных сигналов: 1 - по снижению и оптимизации мощности излучения и повышению эффективности работы излучателей за счет формирования требуемой горизонтальной направленности и управляемой (зависящей от положения оси ПЗК) вертикальной направленности акустического излучения, 2 - в части повышения качества и стабильности во времени навигационных/коммуникационных/управляющих сигналов за счет использования направленного излучения в вертикальной плоскости и фокусировки акустического поля на оси ПЗК, 3 - по снижению уровня межсимвольной интерференции для принимаемых, в области навигационного обеспечения и позиционирования, сигналов за счет уменьшения числа приходов импульсов и сокращения времени реверберации, 4 - увеличивается точность определения дистанций между маяками и подводными объектами, за счет повышения пространственно-угловой идентификации измеренных импульсов и рассчитываемых параметров собственных лучей в акустическом волноводе. Также за счет оптимизации мощности излучения и выбора мест расположения излучателей, достигается снижение уровня акустического воздействия на окружающую среду, что актуально ввиду ограничений по нормам международного законодательства.
Позиционирование и навигация подводного объекта (Фиг. 12), в рабочем режиме рассматриваемой системы навигации, предполагает излучение рабочих навигационных сигналов НС1, НС2 и НС3, с помощью маяков M1, М2 и М3 и аппаратуры соответствующих береговых центров. Излучение всех навигационных сигналов может выполняться одновременно всеми излучателями, или по заданному режиму каждым излучателем. Информация по индивидуальным (базовым) характеристикам рабочих навигационных сигналов для каждого маяка - вид кодовой последовательности, частота заполнения и длительность излучаемого импульса, число периодов поля на кодовое значение, вводится в блок памяти ПО перед началом выполнения миссии. Указанные параметры не изменяются, либо изменяются синхронно с соответствующими изменениями данных в памяти ПО в процессе выполнения миссии аппарата. Управление характеристиками и синхронизация излучения навигационных сигналов всех БЦ выполняется с помощью ТЭ/ТС - наземных и/или спутниковых эталонов времени по ИК/СК информационным наземным и/или спутниковым каналам связи. Для позиционирования используются данные ПО с датчика глубины, данные измерителя локальной скорости звука или измерителей параметров среды - температуры, солености и давления, по которым по известным формулам вычисляется скорость звука в окружающей водной среде.
Определение горизонтальной дальности r1, r2 и r3 выполняется по измеренным временам прихода одного или/и или нескольких импульсов для принимаемых HC1, НС2 и НС3, соответственно. В вычислительном устройстве подводного объекта по найденным значениям горизонтальных дистанций r1, r2 и r3 методом триангуляции, определяется положение подводного аппарата (в проекции на поверхность) относительно маяков, а с учетом географических координат маяков и данных измерений глубины - определяются соответствующие географические координаты и подводное положение в пространстве.
Изменение характеристик излучаемых рабочих НС, связанных, например, с сезонными изменениями ПЗК должно проводиться не реже четырех раза в год. Поддержание заданных параметров сигналов в звуковом канале в области шельфа может потребовать увеличения количества изменений параметров излучаемых навигационных сигналов и сигналов управления до 8-12 за годичный цикл. Изменения параметров сигналов для учета синоптической изменчивости можно проводить по реальным данным метеонаблюдений или использовать прогнозные расчеты и статистические данные положения ПЗК в конкретных районах навигационного обеспечения. Непериодические разовые изменения излучением в режиме обратной связи, могут использоваться в случаях проведения специальных подводных работ, при обеспечении индивидуальных миссий ПО, а также в периоды времени возмущающих воздействий краткосрочных и непериодических акустических и гидродинамических источников на водную среду в области шельфа. Например, экстремальное усиление поверхностного волнения за счет крупномасштабных атмосферных процессов - циклонов, ураганов и тайфунов или выносы холодных/теплых вод в районы установки ИНС могут привести к кратковременным (на период от 24 часов до 2-3 суток) изменениям параметров водной среды, снижающим качество позиционирования, что может потребовать изменить отдельные параметры системы (мощность излучения, диапазон частот, характеристики направленности ИНС). Изменения параметров среды, а также антропологические акустические шумы - вызванные судоходством, строительными работами на подводных объектах в районах навигации и другие процессы, приводящие к повышению уровня окружающих шумов и ухудшению позиционирования/навигации, имеющие непериодический и краткосрочный во времени характер, которые могут быть также скомпенсированы, в режиме обратной связи, оперативной подстройкой параметров излучаемых акустических сигналов.
В качестве примера приведены вертикальные профили скорости звука в результате сезонных вариаций параметров водной среды в Японском море (Фиг. 13).
Описание выбора рабочих навигационных сигналов HQ, приведенное выше, была выполнено для условий зимнего распределения скорости звука по глубине (Зима), в этом районе. Управляемый переход на НС2, соответствующий весенней гидрологии, (Весна), включает в себя измерение вертикального профиля скорости звука и функции отклика акустического канала, по схеме, приведенной выше, и выполнение численного моделирования для измеренного профиля. При совпадении измеренных и рассчитанных значений функций отклика акустического канала, соответствующих весенней гидрологии, определяются новые угловые характеристики излучения НС2. Плановый переход с зимнего режима излучения HC1 на весенний режим требует изменения диаграммы направленности излучения сигналов в вертикальной плоскости и рекомендованных диапазонов глубин навигации и позиционирования ПО, таблица.
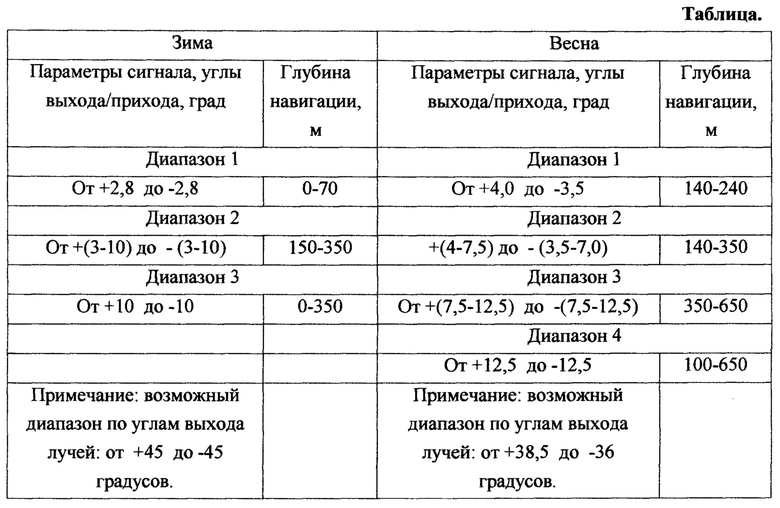
Аналогичным образом, в режиме обратной связи, для компенсации ухудшающих качество навигационного обеспечения процессов в области навигации ПО, имеется возможность управления и коррекции режимов излучения навигационных сигналов каждым маяком М.
Таким образом заявляемые способ и система обеспечивают пассивное позиционирование и навигацию подводных объектов в глубоком океане на больших дальностях от излучателей и на больших по площади акваториях, увеличение точности определения дистанций между маяками и подводным объектом за счет улучшения пространственно-угловой идентификации измеренных импульсов и рассчитываемых параметров собственных лучей в акустическом волноводе, снижение и оптимизацию мощности излучения и повышение эффективности работы излучателей за счет учета географических и батиметрических параметров области навигации при формирования горизонтальной направленности и управляемой, зависящей от положения оси ПЗК, вертикальной направленности акустического излучения; улучшение качества и стабильности характеристик навигационных/коммуникационных/управляющих сигналов во времени за счет использования направленного узкоуглового излучения в вертикальной плоскости и фокусировки акустического поля на оси ПЗК; снижение уровня межсимвольной интерференции для принимаемых в области навигационного обеспечения и позиционирования сигналов за счет задания оптимальной длительности сигналов, уменьшения числа приходов импульсов и сокращения общего времени реверберации при приеме; а также снижение уровня акустического воздействия на окружающую среду за счет оптимизации мощности излучения и выбора мест расположения излучателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| Гидроакустическая навигационная система дальнего радиуса действия | 2022 |
|
RU2790937C1 |
| Абонентский приемник в составе гидроакустической системы позиционирования большой дальности для глубокого моря | 2022 |
|
RU2789636C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ позиционирования подводного объекта на больших дистанциях | 2022 |
|
RU2794700C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| Гидроакустическая дальномерная система навигации | 2016 |
|
RU2624980C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |

Изобретение относится к подводным пассивным гидроакустическим навигационным системам в глубоком океане на больших дальностях от излучателей и на больших по площади акваториях. Для позиционирования подводных объектов на больших (500 км и более) дальностях от берегов в открытом океане, в шельфовой (мелководной) области океана стационарно (на дне или на придонных платформах) размещают излучатели навигационных сигналов таким образом, чтобы горизонтальные расстояния между соседними излучателями были соизмеримы с расстояниями до подводных объектов в глубоководной части океана. На границе шельфовой зоны и глубоководной части океана или в районе океанического свала стационарно устанавливают вертикальные акустические приемные системы, которые предназначены для приема сигнала калибровки от излучателей и, в режиме обратной связи, для формирования акустических навигационных сигналов с заданными параметрами на оси глубоководного подводного звукового канала для пассивной навигации и позиционирования подводных объектов. В основу изобретения положено определение и задание оптимальных по угловым характеристикам направленности и длительности навигационных и информационных сигналов и их фокусировки на оси глубоководного звукового канала в области континентального свала. Технический результат - точность и надежность измерения дистанций и подводного позиционирования объектов навигации на больших дальностях в глубоком океане, в том числе для изменяющихся условий окружающей среды, улучшение качества и стабильности характеристик навигационных / коммуникационных / управляющих сигналов, снижение и оптимизация мощности излучения и повышение эффективности работы излучателей дальномерных и/или навигационных систем. 2 н. и 4 з.п. ф-лы, 13 ил., 1 табл.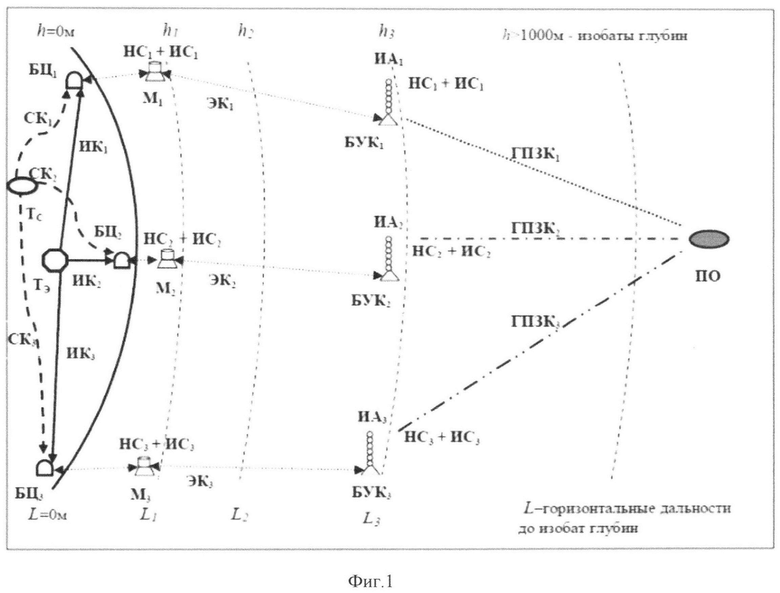
1. Способ пассивного позиционирования и навигации подводного объекта, включающий излучение кодоимпульсных фазоманипулированных навигационных и информационных сигналов с частотой в диапазоне 50-200 Гц и длительностью от 10 до 100 с угловыми характеристиками направленности излучения в горизонтальной плоскости в соответствии с расположением требуемой пространственной области навигационного обеспечения, как минимум, тремя акустическими маяками, стационарно размещенными в зоне шельфа на дистанциях друг от друга, соизмеримых с дистанцией до подводного объекта, прием сигналов, как минимум, одной вертикальной измерительной антенной каждого маяка, стационарно размещенной с известными координатами в области подводного звукового канала на границе глубокого моря, причем приемные акустические датчики антенн объединены с измерителями локальной скорости звука, определение положения оси подводного канала и вертикальных угловых характеристик рабочих навигационных сигналов, принимаемых на оси глубоководного звукового канала, излучение маяками выбранных рабочих навигационных сигналов, прием их расположенными на оси подводного звукового канала приемными акустическими датчиками каждой из антенн, определение времени приема, вертикального распределения скорости звука вдоль антенны, формирование антеннами и передача информационных сообщений на навигационный комплекс подводного объекта маяками, соответствующими антеннам, при этом маяки и антенны синхронизированы с эталоном времени; прием подводным объектом навигационных сигналов и информационных сообщений, как минимум, от трех маяков, выделение, определение и идентификация времен приходов импульсов в каждом из принимаемых навигационных сигналов в рамках лучевого приближения с учетом значений скорости звука вдоль вертикальной антенны и в точке приема подводным объектом, определение горизонтальных дистанций от вертикальных антенн до подводного объекта с учетом информационных сообщений и последующее позиционирование подводного объекта относительно вертикальных антенн методом триангуляции и определение положения подводного объекта в пространстве с учетом географических координат антенн и глубины подводного объекта.
2. Способ по п. 1, отличающийся тем, что определение горизонтальных дистанций от вертикальных антенн до подводного объекта с учетом информационных сообщений и последующее позиционирование подводного объекта относительно вертикальных антенн методом триангуляции и определение положения подводного объекта осуществляют по временам приходов навигационных сигналов, распространяющихся по более чем одной лучевой траектории.
3. Система для пассивного позиционирования и навигации на больших дальностях, включающая, как минимум, три размещенных стационарно в области шельфа маяка, излучающих кодоимпульсные фазоманипулированные навигационные и информационные сигналы и обладающих широкоугольной горизонтальной диаграммой направленности и управляемой диаграммой направленности в узком диапазоне углов в вертикальной плоскости, размещенных таким образом, чтобы горизонтальные расстояния между соседними маяками были соизмеримы с расстояниями до подводных объектов; береговые центры, соответствующие каждому из маяков, и, как минимум, для каждого маяка одну стационарно размещенную в месте с известными координатами вертикальную измерительную антенну, акустические приемные датчики которой объединены с измерителями локальной скорости звука, и снабженную блоком управления и калибровки, который содержит электронные блоки синхронизируемых высокоточных часов, обработки сигналов с вертикальной антенны, определения параметров рабочих навигационных сигналов, измерения вертикального распределения скорости звука вдоль антенны, расчета времени распространения навигационных сигналов от маяка до антенны и блок формирования информационных сообщений для каждого маяка; бортовой навигационный комплекс подводного объекта, включающий электронные блоки синхронизации времени, приема и первичной обработки кодоимпульсных фазоманипулированных навигационных сигналов, содержащих не менее одного импульса, соответствующего распространению сигнала по различным лучевым траекториям, и блок декодировки информационных сигналов, как минимум, от трех маяков, и вычислительное устройство, обеспечивающее вычисления координат подводного объекта, при этом береговые центры соединены энергообеспечивающим и информационным кабелем с маяками и антеннами, а информационными каналами с эталоном времени.
4. Система по п. 3, отличающаяся тем, что в качестве маяков использованы одиночные акустические параметрические излучатели.
5. Система по п. 3, отличающаяся тем, что в качестве маяков использованы излучающие антенны, состоящие из нескольких параметрических излучателей.
6. Система по п. 3, отличающаяся тем, что блок приема кодоимпульсных фазоманипулированных навигационных подводного объекта представляет собой приемную антенну.
| УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ | 2011 |
|
RU2488842C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
| US 9013959 B2, 21.04.2015 | |||
| US 8385152 B2, 26.02.2013. | |||

