Изобретение относится к области гидроакустики и может быть использовано для акустического и оптического мониторинга бесшумных подводных целей.
Известно устройство аналогичного назначения, содержащее оптически согласованные лазер, формирователь лазерного луча с полой сердцевиной и дефлектор, а также гидрофон с равномерной характеристикой направленности, расположенный на оптической оси лазера за дефлектором.
Недостатком известного оптико-акустического шумопеленгатора являются отсутствие оптического изображения подводного объекта на выходе устройства и невозможность обследования бесшумных целей.
Известен гидролокатор для оптико-акустического обследования подводного объекта, принятый за прототип.
Прототип содержит оптически согласованные источник электромагнитной энергии, оптическую систему и дефлектор, а также акустический преобразователь и последовательно подключенные к нему усилитель, блок обработки и регистратор.
Работа прототипа основана на формировании вблизи подводного объекта акустического сигнала при поглощении объектом электромагнитной энергии от источника, размещенного на платформе, и приеме этого сигнала акустическим преобразователем. Подобный прием позволяет вести акустическое обследование бесшумных подводных целей.
Недостатком прототипа являются отсутствие на выходе гидролокатора оптического изображения подводного объекта и слабое пространственное разрешение бесшумных подводных целей из-за формирования широкого луча электромагнитной энергии.
Техническим результатом, получаемым от внедрения изобретения, будет повышение эффективности оптико-акустического обследования подводного объекта путем дополнительного формирования наряду с акустическим оптического изображения цели, а также путем повышения пространственного разрешения при формировании акустического изображения цели за счет использования узкого лазерного луча.
Данный технический результат получают за счет того, что предлагаемый гидролокатор для оптико-акустического обследования подводного объекта, содержащий оптически согласованные источник электромагнитной энергии, оптическую систему и дефлектор, а также акустический преобразователь и последовательно подключенные к нему усилитель, блок обработки и регистратор, дополнительно содержит оптически согласованные с источником электромагнитной энергии сканатор и оптический преобразователь, а также программное устройство и видеокамеру, при этом источник электромагнитной энергии выполнен в виде лазера, оптическая система - в виде формирователя лазерного луча с полой сердцевиной, а в качестве акустического преобразователя использован акустический преобразователь с равномерной характеристикой направленности, расположенный на оптической оси лазера за сканатором и дефлектором, причем оптический преобразователь установлен перед дефлектором, а программное устройство подключено своими выходами к оптическому преобразователю, сканатору и дефлектору, а также к синхровходам регистратора и видеокамеры.
Формирователь лазерного луча может быть снабжен приводом его смещения относительно оси лазера, при этом управляющий вход привода подключен к одному из выходов программного устройства.
Изобретение поясняется чертежом, на котором представлена блок-схема гидролокатора.
Гидролокатор содержит оптически согласованные лазер 1, оптический преобразователь 2 для преобразования спектрального состава лазерного излучения, формирователь 3 лазерного луча с полой сердцевиной, поворотный рефлектор 4, дефлектор 5 и сканатор 6.
Имеются также акустический преобразователь 7 с равномерной характеристикой направленности, установленный на оптической оси лазера за сканатором 6 и дефлектором 5, а также усилитель 8, блок обработки 9 и регистратор 10 акустического изображения (схема соединений блоков представлена на чертеже).
Гидролокатор включает в себя видеокамеру 11, содержащую кроме видеоголовки 12 также видеоусилитель 13, блок обработки 14 и регистратор 15 оптического изображения.
В состав гидролокатора входит также программное устройство 16, выходы которого подключены к блокам 2, 3, 5, 6, 10, 15.
Программное устройство 16 может быть выполнено в виде генератора командных импульсов, следующих с заданными временными интервалами на подключенные к нему блоки.
Лазер 1 может быть выполнен в виде неодимового или рубинового лазера, работающего в режиме свободной генерации импульсов.
Формирователь 3 лазерного луча с полой сердцевиной может быть выполнен в виде зеркальной телескопической системы, например в виде последовательно расположенных вогнутого и выпуклого зеркал, при этом выпуклое зеркало обращено к лазеру 1 и вогнутому зеркалу, которое выполнено с центральным отверстием и с возможностью изменения взаимного расстояния между зеркалами (подобное выполнение формирователя лазерного луча на чертеже не представлено, поскольку известно из аналога).
Формирователь 3 может быть установлен на оптическом столе, снабженном приводом, который управляется от командного импульса программного устройства 16 (указанные элементы на чертеже не представлены).
Остальные блоки гидролокатора особенностей не имеют.
Гидролокатор работает следующим образом.
Направляют лазерный луч 17 в сторону исследуемого подводного объекта 18. Программное устройство 16 подает на формирователь 3, дефлектор 5, сканатор 6 и регистратор 10 акустического изображения командные импульсы, запускающие в работу данные блоки.
При этом формирователь 3 формирует лазерный луч 17 с полой сердцевиной. Частично поглощаясь в воде, лазерное импульсное излучение формирует в среде звукопроводный канал 19, отличающийся повышенной температурой (а значит, и повышенным коэффициентом преломления звука) по периферии канала. Это обеспечивает практически безпрепятственное прохождение звуковых сигналов определенных частот по звукопроводному каналу 19 от объекта 18 за период несколько секунд.
Подводный объект 18 начинает "звучать" под действием того же лазерного импульса, который приводит к нагреву поверхности объекта 18 и локальному объемному расширению зоны облучения.
Поскольку дефлектор 5 и сканатор 6 одновременно смещают луч 17 в пространстве и сканируют его с амплитудой, равной примерно половине диаметра луча 17, то звуковой сигнал от объекта 18 будет распространяться по звукопроводному каналу 19 и достигать акустического преобразователя 7, расположенного в полой сердцевине лазерного луча 17 и в том его месте, откуда начинается сканирование и угловое смещение луча сканатором 6 и дефлектором 5. То есть акустический преобразователь 7, расположенный достаточно близко к дефлектору 5 и сканатору 6 (на чертеже это не отражено), не мешает перемещению и сканированию лазерного луча 17.
От акустического преобразователя 7 сигнал направляется на усилитель 8, блок обработки 9, к регистратору 10 акустического изображения.
В определенный момент времени, задаваемый программным устройством 16, на преобразователь 2 и синхровход видеокамеры 11 (например, совмещенный с регистратором 15 оптического изображения объекта) подаются командные импульсы, включающие блоки 2, 11 и отключающие блоки 3, 6, 10.
При этом с помощью привода (на чертеже не показан) формирователь 3 смещается относительно оси лазера 1, а сканатор 6 переходит в режим прямого пропускания лазерного излучения.
Если в качестве лазера 1 применяется лазер на неодиме с длиной волны 1,06 мкм, то в качестве преобразователя 2 используется удвоитель частоты, преобразующий инфракрасное излучение лазера 1 в зеленое, обладающее наименьшим коэффициентом поглощения в воде.
Последовательно перемещаясь по поверхности объекта 18, лазерный луч освещает ее в различных точках. Видеокамера 11 регистрирует оптическое изображение объекта 18.
В последующий момент времени программное устройство 16 вновь переводит работу гидролокатора в режим регистрации акустического изображения объекта.
Таким образом, с помощью гидролокатора можно одновременно получать оптическое и акустическое изображение подводного объекта, т.е. осуществлять оптико-акустический мониторинг объекта с высоким пространственным разрешением.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-АКУСТИЧЕСКИЙ ГИДРОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ БЕСШУМНЫХ ПОДВОДНЫХ ЦЕЛЕЙ В РЕЖИМЕ ПАССИВНОЙ ГИДРОАКУСТИКИ | 1997 |
|
RU2115938C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| ТЕРМООПТИЧЕСКИЙ СПОСОБ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2192023C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| ГОЛОГРАФИЧЕСКАЯ АКУСТООПТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ В НАТУРНОМ ВОДОЕМЕ | 2003 |
|
RU2236691C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| ОПТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ГИДРОФОН | 2001 |
|
RU2185709C1 |
| ПОДВОДНОЕ РАЗВЕРТЫВАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2214656C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ СЛАБОШУМЯЩИХ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 1997 |
|
RU2125731C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ПОДВОДНЫХ ТЕЧЕНИЙ | 1994 |
|
RU2105985C1 |
Изобретение относится к гидроакустике и может быть использовано для акустического и оптического мониторинга бесшумных подводных объектов. Достигаемый технический результат - повышение эффективности обследования подводного объекта за счет использования его оптических и акустических характеристик. Сущность изобретения заключается в том, что формируется лазерный луч с полой сердцевиной, который нагревает поверхность объекта, в результате чего она начинает излучать акустические волны, а также создается в водной среде зона с повышенной температурой по периферии луча, что приводит к созданию звукопроводного канала, по которому акустические волны проходят до акустического преобразователя, позволяющего с помощью рефлектора и сканатора сформировать акустическое изображение объекта. Устройство включает также видеокамеру, фиксирующую изображение, и программное устройство, управляющее работой гидролокатора. 2 з.п. ф-лы, 1 ил.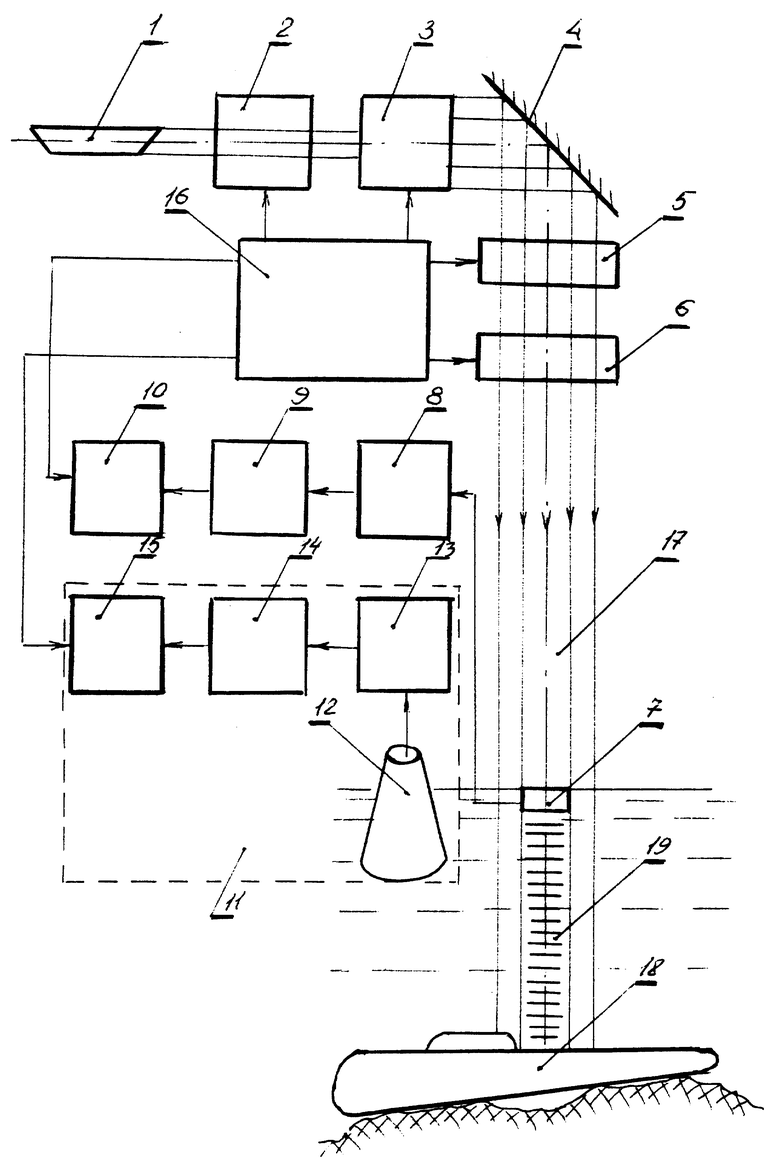
| RU 95107337 A1, 10.02.97 | |||
| US 4991149 A, 05.02.91 | |||
| US 5033034 A, 16.07.91 | |||
| US 3507553 A, 21.04.70 | |||
| US 5070733 A, 10.12.91. |
