Изобретение относится к гидроакустике и может быть использовано для обнаружения бесшумных подводных целей способами пассивной гидроакустики.
Известен оптико-акустический шумопеленгатор [2] для обнаружения малошумящих целей способами пассивной гидроакустики, содержащий оптически согласованные лазер, формирователь лазерного луча с полой сердцевиной и дефлектор, а также гидрофон с равномерной характеристикой направленности, расположенный на оптической оси лазера за дефлектором.
Работа известного шумопеленгатора основана на создании в водной среде с помощью лазера на неодиме или рубине звукопроводного канала, по которому шумоизлучение от слабошумящего подводного объекта распространяется к гидрофону.
Недостатком известного оптико-акустического шумопеленгатора являются трудности в обнаружении бесшумных целей.
Известен оптико-акустический гидролокатор для обнаружения бесшумных целей в режиме пассивной гидроакустики [1] (прототип), содержащий оптически согласованные лазер, модулятор, оптическую систему и дефлектор, акустический преобразователь, выход которого через усилитель и блок обработки соединен с индикатором, и блок управления, соединенный с модулятором и блоком обработки.
Недостатками прототипа являются невысокая дальность обнаружения и слабое пространственное разрешение бесшумных подводных целей. Данные недостатки связаны с тем, что в прототипе оптическая система формирует широкий расходящийся лазерный луч, с помощью которого невозможно получить достаточно высокий уровень шума от объекта. С другой стороны, в прототипе [1] акустический преобразователь пространственно не совмещен как в аналоге [2] с лазерным лучом, поэтому до акустического преобразователя будет доходить лишь небольшая часть шумоизлучения объекта.
Техническим результатом, полученным от внедрения изобретения, будет повышение дальности обнаружения и пространственного разрешения подводной цели.
Данный технический результат достигается за счет того, что в оптико-акустический гидролокатор для обнаружения бесшумных подводных целей в режиме пассивной гидроакустики, содержащий оптически согласованные лазер, модулятор, оптическую систему и дефлектор, акустический преобразователь, выход которого через усилитель и блок обработки соединен с индикатором, и блок управления, соединенный с модулятором и блоком обработки, дополнительно введены сканатор, установленный за или перед дефлектором, и программный блок, подключенный к дефлектору и сканатору, при этом оптическая система выполнена в виде формирователя лазерного луча с полой сердцевиной, а акустический преобразователь выполнен с равномерной характеристикой направленности и расположен на оптической оси лазера за сканером или дефлектором.
В частном случае, как и в аналоге, формирователь лазерного луча с полой сердцевиной может быть выполнен в виде зеркальной телескопической системы, например в виде последовательно расположенных за лазером вогнутого и выпуклого зеркал, при этом выпуклое зеркало обращено к лазеру и вогнутому зеркалу, которое выполнено с центральным отверстием и с возможностью изменения взаимного расстояния между зеркалами.
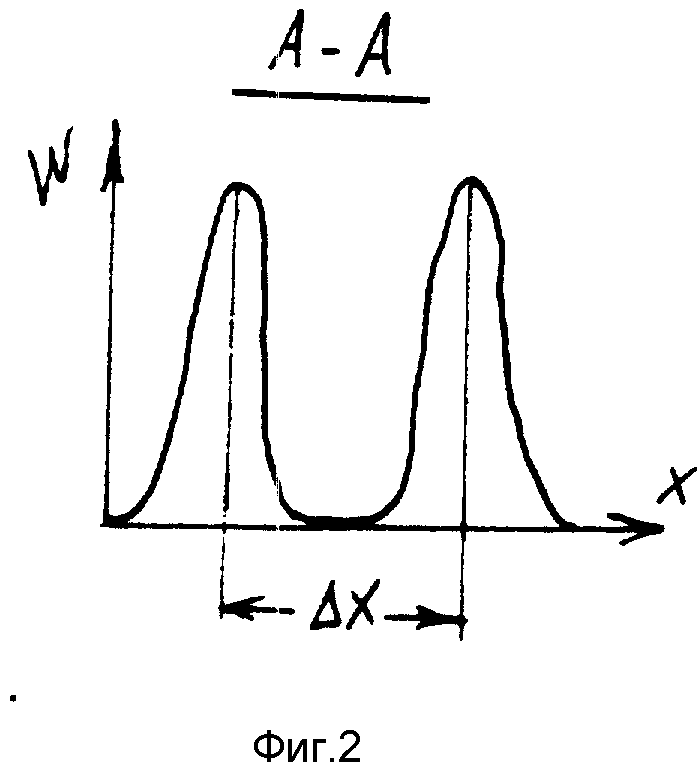
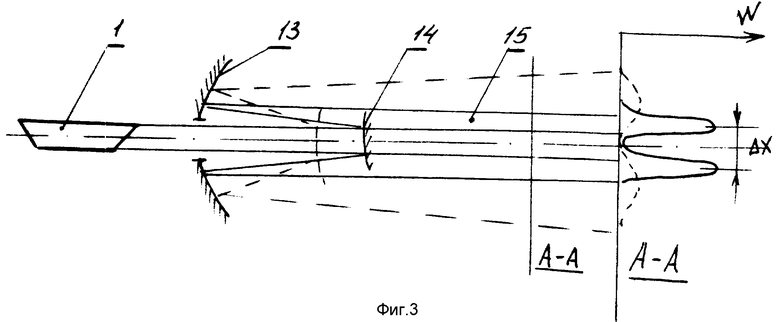
На фиг. 1 представлена схема оптико-акустического гидролокатора; на фиг. 2 - сечение А-А на фиг. 2; на фиг. 3 - пример выполнения формирователя лазерного луча с полой сердцевиной.
Гидролокатор содержит оптически согласованные лазер 1, модулятор 2, оптическую систему 3, поворотный рефлектор 4, дефлектор 5 и сканатор 6.
Оптическая система 3 выполнена в виде формирователя лазерного луча с полой сердцевиной, с распределением оптической плотности W по сечению луча А-А (фиг. 2).
Гидролокатор также содержит акустический преобразователь 7 с равномерной характеристикой направленности, расположенной на оптической оси лазера 1, усилитель 8, блок 9 обработки, блок 10 управления и индикатор 11. Кроме того, имеется также программный блок 12, подключенный к дефлектору 5 и сканатору 6.
Выход акустического преобразователя 7 через усилитель 8 и блок 9 обработки подключен к индикатору 11. Выходы блока 10 управления подключены к модулятору 2 и блоку 9 обработки. Для определения координат цели выходы программного блока 12 могут быть соединены с индикатором 11 (на фиг. 1 не показано).
В частном случае оптическая система 3 может быть выполнена в виде последовательно расположенных за лазером 1 вогнутого и выпуклого зеркал 13 и 14, при этом выпуклое зеркало 14 обращено к лазеру 1 и вогнутому зеркалу 13, которое выполнено с центральным отверстием и с возможностью изменения взаимного расстояния между зеркалами.
Гидролокатор работает следующим образом.
С помощью модулятора 2 модулируют излучение лазера 1 по известному закону. Для гидролокации наиболее подходящей является модуляция излучения лазера в виде последовательности импульсов длительностью τ = 10-4-10-3 с и периодом следования 10-1 - 1 с. В качестве лазера 1 удобно использовать лазер на неодиме или рубине, у которых коэффициенты поглощения излучения водой соответственно 10 и 1 м-1 на длинах волн λ = 1,06 и 0,7 мкм. Модуляция может быть как внутренней (как в прототипе), так и внешней (как на фиг. 1).
Затем лазерное излучение проходит оптическую систему 3, выполненную в виде формирователя луча с полой сердцевиной, например, по схеме, представленной на фиг. 3. На выходе оптической системы 3 формируется лазурный луч 15 с распределением плотности лазерной энергии W по сечению (фиг. 2 и 3).
С помощью поворотного рефлектора 4 излучение луча 15 направляется в морскую среду 16, проходя перед этим дефлектором 5 и сканатор 6.
Дефлектор 5 поворачивает лазерный луч, осуществляя поиск цели 17, а сканатор 6 осуществляет одновременно сканирование луча в плоскости xy с амплитудой порядка Δx (фиг. 1 - 3). Законы отклонения и сканирования луча в пространстве задаются программным блоком 12.
Акустический преобразователь 7, расположенный в сердцевине луча 15 достаточно близко к дефлектору 5 и сканатору 6, не мешает проведению данных пространственных манипуляций с лучом, который, во-первых, частично поглощаясь в среде 16, нагревает ее по закону W(x) и, во-вторых, попадая на цель 17, вызывает нагрев последней в зоне облучения. При этом и происходят следующие физические явления. В среде 16 в зоне облучения формируется звукопроводный канал 17 [2] в результате частичного поглощения лазерного излучения водой, а в зоне нагрева поверхности цели 17 при поглощении лазерного излучения формируется акустический сигнал [1], попадающий в результате сканирования луча в звукопроводный канал 18.
Несмотря на небольшую интенсивность акустического сигнала, последний легко выделить по уровню шумов в результате демодуляции сигнала в блоке 9 обработки (после его усиления в усилителе 8), поскольку полезный сигнал по звукопроводному каналу 18 распространяется практически без ослабления. Способы обработки и выделения полезного сигнала из шумов в прототипе и предлагаемом гидролокаторе примерно совпадают, поэтому не описываются. Форма сигналов на выходах блоков представлена на фиг. 1 в качестве одного из вариантов работы гидролокатора.
По временным характеристикам сигнала, зарегистрированного индикатором 11, можно определить пространственные координаты цели и ее размеры и форму (известные средства сопровождения цели не описаны).
По сравнению с прототипом предлагаемый гидролокатор позволяет повысить дальность обнаружения цели за счет создания в среде звукопроводного канала, по которому полезный звуковой сигнал достигает акустического преобразователя. В прототипе электромагнитная энергия в этом плане в воде тратится впустую и не используется для достижения положительного эффекта. Кроме того, в заявляемом гидролокаторе повышается пространственное разрешение подводной цели ввиду использования узкого лазерного луча.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОЛОКАТОР ДЛЯ ОПТИКО-АКУСТИЧЕСКОГО ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 1997 |
|
RU2141676C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| ТЕРМООПТИЧЕСКИЙ СПОСОБ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2192023C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2154841C1 |
| ГИДРООПТИЧЕСКАЯ АППАРАТУРА ДЛЯ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2193213C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ СЛАБОШУМЯЩИХ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 1997 |
|
RU2125731C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| ГОЛОГРАФИЧЕСКАЯ АКУСТООПТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ В НАТУРНОМ ВОДОЕМЕ | 2003 |
|
RU2236691C1 |
Изобретение относится к гидроакустике и может быть использовано для обнаружения подводных бесшумных целей в режиме пассивной гидроакустики. Технический результат - повышение дальности обнаружения и пространственного разрешения цели - достигается тем, что с помощью лазерного луча с полой сердцевиной создают звукопроводный канал в среде распространения и с помощью того же луча, модулированного по известному закону, производят нагрев поверхности цели так, что она создает акустический сигнал, попадающий в результате сканирования в звукопроводный канал. Сигнал, поступивший на акустический преобразователь, усиливается и через блок обработки поступает на индикатор. 2 з.п. ф-лы, 3 ил.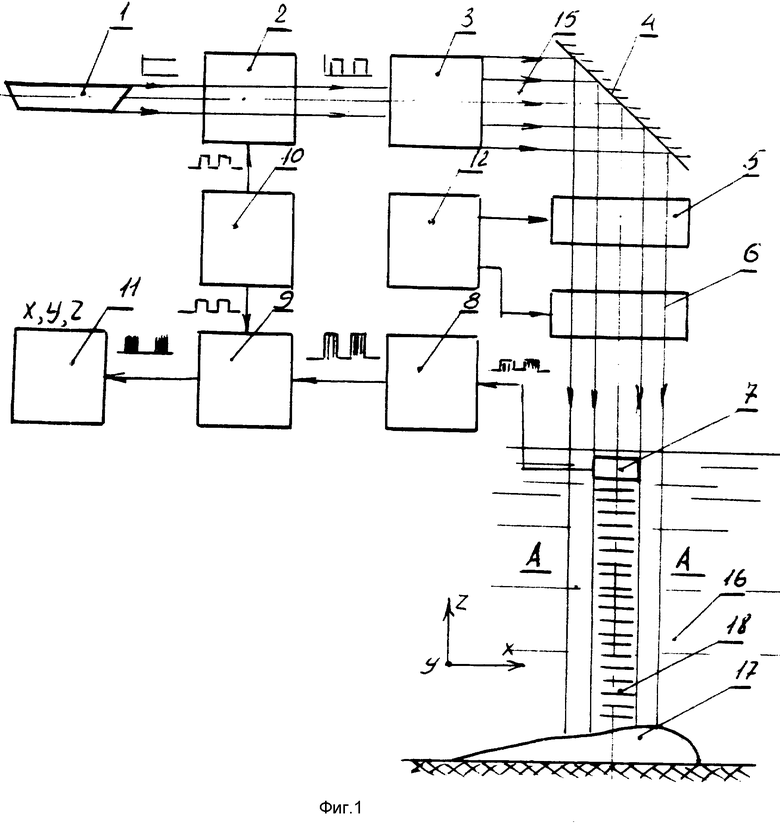
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 4991149 А, 05.02.91 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU 95107337 А1, 10.02.97. | |||
