Изобретение относится к области балансировочной техники и может быть использовано для автоматической балансировки вращающихся тел, в частности роторов.
Известны устройства для балансировки вращающихся тел, содержание платформу для установки тела, имеющую возможность смещения в двух взаимно перпендикулярных направлениях, механизм измерения колебаний платформы в этих направлениях, а также исполнительный механизм устранения дебалансов /см. а.с. СССР №712708, кл. G 01 М 1/16, 1980 [1]; а.с. СССР №1060958, кл. G 01 М 1/38, 1982 [2]/.
Недостатками известных устройств являются их предельная сложность и низкая производительность вследствие практического отсутствия автоматизации процесса балансировки.
Известны также устройства для автоматический балансировки вращающихся тел, содержащие либо свободно надетые на тело и подпружиненные в осевом направлении кольца с установленными на них балансировочными грузами, имеющими возможность сходиться-расходиться при вращении тела под действием центробежных сил инерции /см. а.с. СССР №632919, кл. G 01 M 1/38, 1978 [3], либо кольца с эксцентричными массами, установленные на тело по посадке с зазором при наличие различных коэффициентов трения скольжения на участках внутренних цилиндрических поверхностей колец и с возможностью поворота колец вокруг своей оси /см. а. с. СССР №2148806, кл. G 01 M 1/38, F 16 F 15/32, 1998 [4].
Недостатками известных устройств являются сравнительная сложность процессов балансировки и необходимость применения специальных режимов в каждом конкретном случае из-за опасности как проскакивания оптимального сбалансированного состояния, так и нарушения сбалансированности тела после окончания балансировки в процессе торможения вращения, фиксации противовесов и т.п.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является устройство для автоматической балансировки вращающихся тел, содержащее балансировочный узел в виде двух гаек с закрепленными на них противовесами, свободно навернутых на резьбовой участок тела с нанесенным на него слоем фиксирующего материала /см. а.с. СССР №1677646, кл. G 01 R 5/02, 1989 [5]/ и принятое за прототип.
Недостатками данного устройства - прототипа являются сравнительно низкая точность и сложность процесса балансировки вследствие необходимости применения специальных режимов в каждом конкретном случае из-за опасности как проскакивания оптимально сбалансированного состояния, так и нарушения сбалансированности тела после окончания балансировки в процессе торможения вращения, фиксации гаек с противовесами и т.д. Это объясняется самим принципом автоматической балансировки за счет действия центробежных сил инерции, отсутствием отрицательной обратной связи по возмущению, осуществлением корректирующих воздействий только за счет действия на подвижные гайки с противовесами центробежных сил инерции.
Сущность изобретения заключается в воздействии вибрационных возмущений, возникающих при вращении неуравновешенного тела, на механизм корректировки, приложения за счет этого к телу со стороны механизма корректировки асимметричных воздействий, обеспечивающих направленное вращение эксцентричных масс относительно тела, продолжающееся до прекращения действия вибрационных возмущений, то есть до окончания процесса автоматической балансировки вращающегося тела.
Технический результат - увеличение точности балансировки, повышение производительности процесса и расширение функциональных возможностей устройства.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном устройстве для автоматической балансировки вращающихся тел, содержащем платформу для установки тела, имеющую возможность упругого смещения в двух взаимно перпендикулярных направлениях, размещенный на платформе механизм корректировки и балансировочный узел в виде двух гаек с противовесами, свободно навернутых на резьбовой участок тела с нанесенным на него слоем фиксирующего материала, особенность заключается в том, что противовесы закреплены на обращенных наружу друг от друга торцах, гаек, гайки выполнены с шероховатой боковой цилиндрической поверхностью, а механизм корректировки выполнен в виде четырех упругих пластин, попарно охватывающих, с радиальными зазорами и с двух сторон боковые поверхности каждой из гаек в двух взаимно перпендикулярных направлениях, при этом пластины попарно консольно закреплены на платформе и на прикрепленных к платформе жестких стойках соответственно в перпендикулярных и параллельных платформе плоскостях, на свободных концах пластин размещены дебалансные массы, а участки обращенных к гайкам поверхностей пластин в зоне резьбового участка тела выполнены шероховатыми.
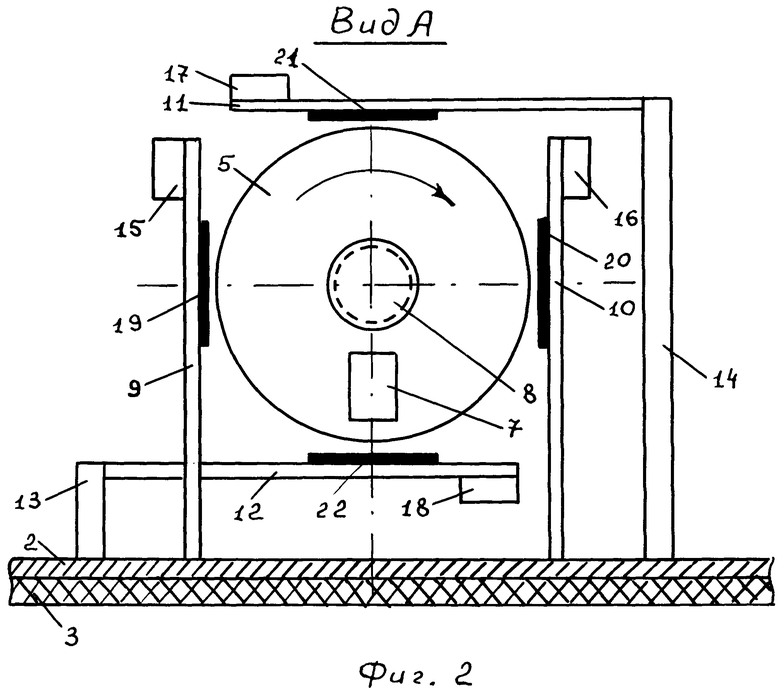
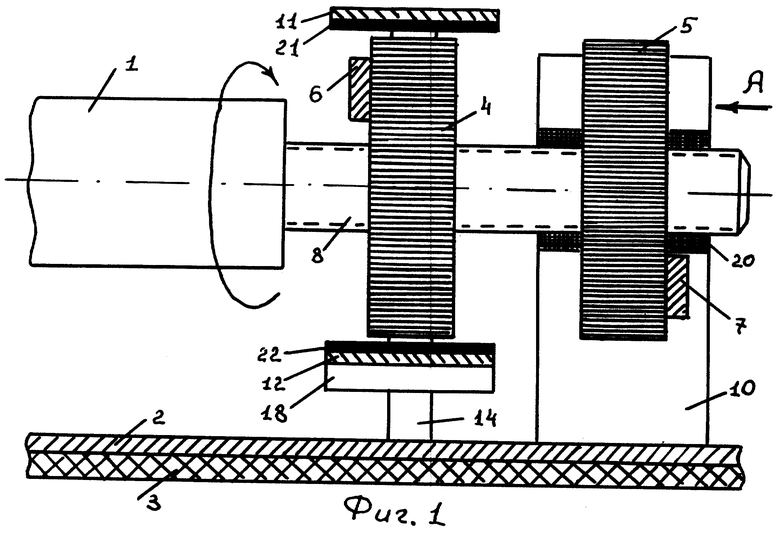
Сущность изобретения поясняется чертежами, где на фиг.1 схематично изображено предлагаемое устройство, общий вид; на фиг.2 - вид А на фиг.1.
Устройство для автоматической балансировки вращающихся тел /тела 1/ содержит платформу 2 для установки тела 1 /опоры для крепления тела 1 с возможностью вращения на чертеже не показаны/, закрепленную на упругом основании 3 с возможностью упругого смещения в двух взаимно перпендикулярных плоскостях, размещенный на платформе 2 механизм корректировки и балансировочный узел в виде двух гаек 4, 5 с противовесами 6, 7, свободно навернутых на резьбовой участок 8 тела 1 с нанесенным на него слоем фиксирующего материала /на чертеже не показан/,при этом противовесы 6, 7 закреплены на обращенных наружу друг от друга торцах гаек 4, 5, гайки 4, 5 выполнены с шероховатой боковой цилиндрической поверхностью, а механизм корректировки выполнен в виде четырех упругих пластин 9, 10, 11, 12, попарно охватывающих с радиальными зазорами с обеих сторон боковые поверхности каждой из гаек 4, 5 в двух взаимно перпендикулярных направлениях, при этом пластины 9, 10 и 11, 12 попарно консольно закреплены на платформе 2 и на прикрепленных к платформе 2 жестких стойках 13, 14 соответственно в перпендикулярных и параллельных платформе 2 плоскостях, на свободных концах пластин 9, 10, 11, 12 размещены дебалансные массы 15, 16, 17, 18 и участки 19, 20, 21, 22 обращенных к гайкам 4, 5 поверхностей пластин 9, 10, 11, 12 в зоне резьбового участка 8 тела 1 выполнены шероховатыми.
Шероховатость боковых, цилиндрических поверхностей гаек 4 и 5 создана с помощью накатки, параллельно и образующим данных поверхностей, в качестве фиксирующего материала на резьбовом участке 8 тела 1 использована медленно твердеющая контровочная смесь, в частности грунтовка 0КА - 070. Материал наносится на участок в жидком состоянии и после застывания надежно фиксирует гайки 4, 5 на теле 1, причем в случае необходимости допускает возможность снятия гаек 4,5 и проведения повторной балансировки. Шероховатость участков 19, 20, 21, 22 создана путем нанесения на пластины 9, 10, 11, 12 поперек пластин, то есть вдоль тела 1 тонких слоев резины, упругие пластины 9, 10, 11, 12 выполнены в виде плоских металлических пружин.
Работа устройства осуществляется следующим образом.
До начала процесса балансировки на резьбовой участок 8 тела 1 наносится в жидком состоянии фиксирующий материал, гайка 3 установлена между упругими пластинами 9, 10, а гайка 4 - между пластинами 11, 12. При полной уравновешенности вращающегося тела 1, то есть равенстве вектора поперечного эксцентрисетета нулю /совпадении центра масс тела 1 в поперечной плоскости с осью вращения/ вращение тела /на чертежах направление вращения показано стрелкой/ не сопровождается его колебаниями в поперечных направлениях, при этом со стороны вращающегося тела 1 к платформе 2 вибрационные возмущения не прикладываются, соответственно упругие пластины 9, 10, 11, 12 неподвижны, и между ними и боковыми поверхностями гаек 3, 4 сохраняются радиальные зазоры. При наличие неуравновешенности тела 1 будет происходить вращение вектора поперечного эксцентрисетета вместе с телом 1, сопровождающееся колебаниями вращающегося тела 1 в поперечных направлениях, и соответственно колебаниями платформы 2 на упругом основании 3 в тех же направлениях. Так, например, при прохождении вектором-эксцентрисететом горизонтального положения, когда центр масс тела 1 в поперечной плоскости смещен относительно оси вращения вправо за счет центробежных сил инерции, происходит поперечное смещение тела 1 и соответственно платформы 2 в горизонтальной плоскости также вправо. При этом правая на фиг.2 упругая пластина 10 за счет наличия в верхней своей части дебалансной массы 16 прогибается влево и прижимается участком 20 к боковой поверхности гайки 5, левая пластина 9, наоборот, еще дальше отходит от гайки 5. Очевидно, что при указанном выше направлении вращения тела 1 /фиг.1/ по часовой стрелке при взгляде справа гайка 5 повернется за счет своего контакта с пластиной 10 против часовой стрелки. При повороте вектора-эксцентрисетета вместе с телом 1 на 180 в другое горизонтальное положение, когда центр масс тела 1 будет смещен относительно его оси вращения влево, поперечное смещение тела 1 и платформы 2 в горизонтальной плоскости также произойдут влево, теперь к гайке 5 прижмется пластина 9, а пластина 10 отойдет еще дальше, гайка 5 опять повернется против часовой стрелки. Очевидно, что такой однонаправленный поворот гайки 5 с закрепленным на ней противовесом 7 будет происходить до полного устранения проекции вектора-эксцентрисетета на горизонтальную ось, и, естественно, до прекращения колебаний вращающегося тела 1 в горизонтальной плоскости. Аналогичный процесс происходит и в направлении вертикальной на фиг.2 оси, перпендикулярной платформе 2, в котором участвуют упругие пластины 11, 12 и гайка 4 с закрепленным на ней противовесом 6. Так, при прохождении вектором-эксцентрисететом тела 1 при вращении вертикального положения, когда центр масс смещен выше оси вращения тела 1, за счет действия центробежных сил инерции тело 1 и платформа 2 смещаются вверх, пластины 11 и 12 прогибаются вниз, верхняя пластина 11 входит в контакт с гайкой 4, заставляя последнюю поворачиваться против часовой стрелки. Аналогичный процесс происходит и при повороте вектора-эксцентрисетета на 180° упругие пластины 11, 12 изгибаются вверх и в контакт с гайкой 4 входит пластина 12, вращая гайку 4 опять против часовой стрелки. В результате однонаправленного поворота гайки 4 с противовесом 6 происходит полное устранение проекции вектора-эксцентрисетета на вертикальную ось. После этого вращение тела 1 останавливают и производят выдержку до застывания фиксирующего материала.
Таким образом, в данном устройстве происходит автоматическое и раздельное устранение составляющих проекций вектора поперечной неуравновешенности вращающегося тела на две ортогональные оси. Это позволяет предельно упростить сам процесс балансировки, абсолютно исключить все возможности неполной сходимости балансировочного процесса, то есть либо недобалансировки, либо проскакивания оптимального сбалансированного состояния использовать для балансировки простейшие режимы при абсолютном исключении любых специальных режимов. Наличие в предлагаемом устройстве отрицательной обратной связи по возмущению, проявляющееся в постепенном уменьшении в процессе балансировки вплоть до полного устранения интенсивности поперечных колебаний вращающегося тела, приводящих в действие механизм корректировки, устраняющий неуравновешенность, позволяет производить балансировку с любой, заранее заданной степенью точности; независимо от природы вращающихся тел, принципа их работы, габаритов, конфигурации и т.п. В отличие от усов в устройстве - прототипе [5] практически в любой конструкции можно найти место для размещения на участке с резьбой двух гаек с противовесами. Появление-прекращение корректирующий воздействий в предлагаемом устройстве, а также интенсивность данных воздействий полностью определяются степенью сбалансированности вращающегося тела. Если в устройстве-прототипе [5] даже при абсолютной сбалансированности тела при любом случайном воздействии при торможении вращения после окончания процесса балансировки под воздействием центробежных сил инерции возможно проскакивание сбалансированного состояния, повторный возврат к нему и т.п., то в предлагаемом устройстве за счет раздельной балансировки и наличия отрицательной обратной связи достигается плавная и раздельная сходимость балансировочного процесса по двум независимым друг от друга ортогональным направлениям. Устройство характеризуется предельной простотой, универсальностью и надежностью в работе.
Изобретение относится к машиностроению и может быть использовано для балансировки роторов в процессе их вращения. Устройство содержит платформу для установки тела, механизм корректировки и балансировочный узел. Последний состоит из двух гаек, навернутых на покрытый слоем фиксирующего материала резьбовой участок тела и выполненных с шероховатой боковой поверхностью, с противовесами, закрепленными на обращенных наружу друг от друга торцах гаек. Механизм корректировки выполнен в виде четырех упругих пластин, попарно охватывающих гайки в двух взаимно перпендикулярных плоскостях, будучи попарно консольно закрепленными в них. На свободных концах пластин размещены дебалансные массы, а участки обращенных к гайкам поверхностей пластин в зоне резьбового участка тела выполнены шероховатыми. Технический результат данного изобретения - увеличение точности балансировки, повышение производительности процесса и расширение функциональных возможностей устройства. 2 ил.
Устройство для автоматической балансировки вращающихся тел, содержащее платформу для установки тела, имеющую возможность упругого смещения в двух взаимно перпендикулярных направлениях, размещенный на платформе механизм корректировки и балансировочный узел в виде двух гаек с противовесами, свободно навернутых на резьбовой участок тела с нанесенным на него слоем фиксирующего материала, отличающееся тем, что противовесы закреплены на обращенных наружу друг от друга торцах гаек, гайки выполнены с шероховатой боковой цилиндрической поверхностью, а механизм корректировки выполнен в виде четырех упругих пластин, попарно охватывающих с радиальными зазорами и с двух сторон боковые поверхности каждой из гаек в двух взаимно перпендикулярных направлениях, при этом пластины попарно консольно закреплены на платформе и на прикрепленных к платформе жестких стойках соответственно в перпендикулярных и параллельных платформе плоскостях, на свободных концах пластин размещены дебалансные массы, а участки обращенных к гайкам поверхностей пластин в зоне резьбового участка тела выполнены шероховатыми.
| Подвижная система электроизмерительного прибора | 1989 |
|
SU1677646A1 |
| Устройство для автоматической балансировки вращающихся тел | 1977 |
|
SU632919A1 |
| Устройство для балансировки роторов | 1982 |
|
SU1021964A1 |
| Балансирующее устройство | 1989 |
|
SU1629767A1 |

