Изобретение относится к области измерительной техники и может быть использовано в серийно выпускаемых конструкциях щитовых электроизмерительных приборов.
Целью изобретения является повыше- ние точности балансировки подвижной системы электроизмерительного прибора и повышение технологичности системы.
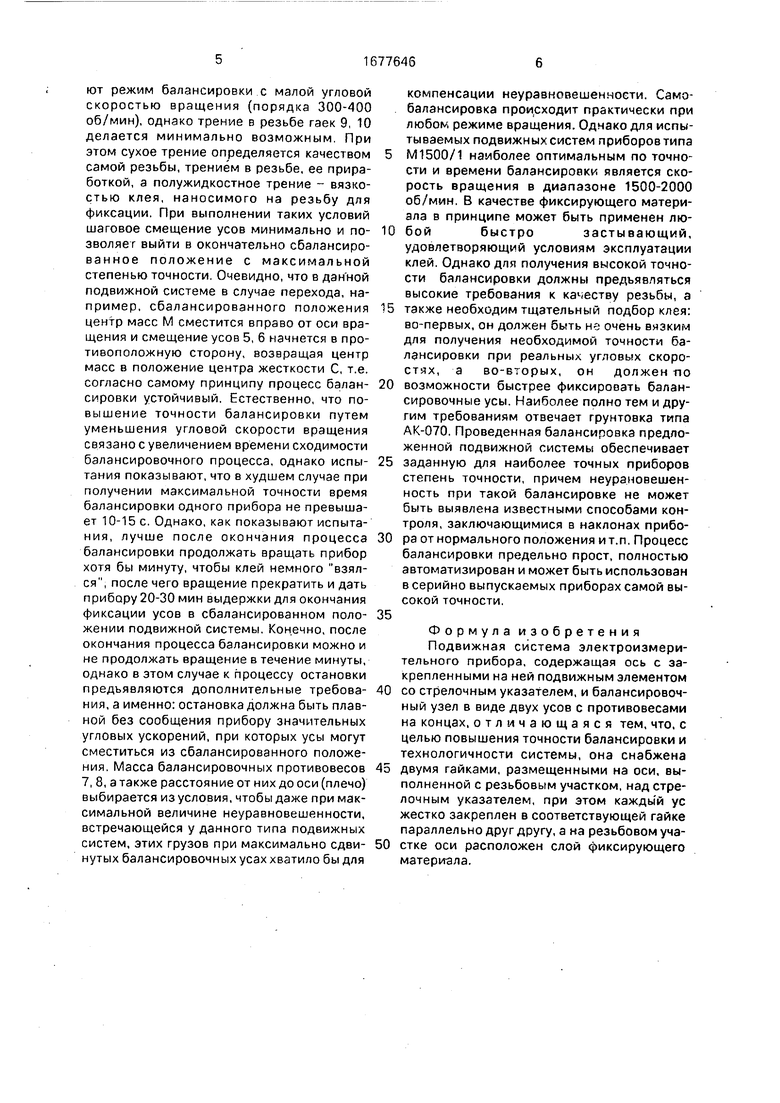
На фиг. 1 схематично изображена предложенная подвижная система, вид спереди; на фиг. 2 - то же, вид сверху.
Подвижная система содержит ось 1 с установленным на ней подвижным элементом (рамкой) 2, на котором укреплен стрелочный указатель 3 с помощью держателя 4, а также балансировочный узел, выполненный в виде двух плоских усов 5,6, на удаленных от оси 1 концах которых закреплены противовесы 7, 8, а внутренние, обращенные к оси 1, концы которых жестко закреп- лены (приварены) на гайках 9, 10, свободно навернутых одна над другой на резьбовой участок 11, выполненный на оси 1 над местом крепления указателя 3 к подвижному элементу 2 и покрытый слоем фиксирующе- го материала (клея) 12.
Процесс уравновешивания предлагаемой подвижной системы осуществляется следующим образом.
Устанавливают прибор на платформу центрифуги в положение (не показано), при котором ось 1 подвижной системы ориентирована вертикально. Усы 5,6 устанавливают в начальном положении друг под другом по линии стрелочного указателя 3 с противопо- ложной от него стороны, так как ориентировочно центр масс подвижной системы должен находиться где-то со стороны стрелочного указателя 3 вблизи от его линии расположения. Пусть, например, в началь- ный момент времени центр масс подвижной системы находится в точке Мине совпадает с центром жесткости С, находящимся в месте крепления оси 1 к подвижному элементу (рамке) 2, на величину вектора поперечного эксцентриситета ёТ Далее начинают вращать прибор на центрифуге (не показан)с постоянной угловой скоростью. За счет возникающих при вращении центробежных сил инерции подвижный элемент 2, установленный с помощью оси 1 в неподвижных опорах упруго в поперечном направлении (либо на растяжках, либо в керновых опорах с помощью моментных спиральных пружин) (не показан), стремится отклониться вдоль линии МК, соединяющей точки М и С, к периферии, т.е. в сторону точки М. Однако, как известно, любая динамическая система стремится по возможности сохранить свое динамическое состояние, соответствующее
минимуму кинетической энергии и максимальной симметрии относительно оси вращения. Поэтому усы 5, 6 будут автоматически раздвигаться-сдвигаться до тех пор, пока не установятся симметрично относительно линии МК. Одновременно, оставаясь симметрично линии МК, усы 5, 6 будут образовывать между собой больший или меньший угол раствора в зависимости от величины эксцентрисетета, т.е. от расстояния МК. образом, чем больше величина эксцентрисетета МС, тем усы 5, 6 будут автоматически сдвигаться между собой, оставаясь симметрично линии МК, на меньший угол, т.е. противовесы 7, 8 при этом будут максимально удаляться от оси 1 вращения подвижной системы. При таком смещении усов 5, 6 будет автоматически происходить балансировка подвижной системы в плоскости, перпендикулярной оси вращения: за счет симметричного расположения усов относительно линии МК масса противовесов 7,8 будет автоматически выходить на линию МК с противоположной от центра масс М системы стороны, за счет же сдвижения- раздвижения усов, оставаясь при этом симметрично линии МК, точка приложения массы противовесов 7, 8 будет перемещаться вдоль линии МК к оси вращения подвижной системы (при раздвижении усов), либо от оси вращения (при сдвижении усов). При таком перемещении (повороте) усов 5,6 (центр масс М подвижной системы автоматически смещается вдоль линии МК отточки М к точке С, т.е. автоматически загоняется в точку С, когда вектор эксцентрисетета е станет равным нулю. В этом положении равенства нулю вектора-эксцентрисетета прекращается действие на подвижную систему центробежных сил инерции, т.е. усы 5, 6 остаются в этом последнем положении, соответствующем сбалансированности подвижной системы, в этом же положении они остаются в дальнейшем после отвердевания клея 12, фиксирующего гайки 9, 10 с усами 5, 6.
Очевидно, что предлагаемая подвижная система позволяет производить балансировку практически с любой необходимой степенью точности, причем эта степень точности может быть задана заранее и зависит от режимов балансировки и параметров балансировочного узла. Процесс балансировки данной подвижной системы является сходящимся, причем полностью исключается возможность проскакивания при повороте усов сбалансированного положения. Для получения максимальной точности процесса при балансировке подвижных систем приборов самой высокой точности выбирают режим балансировки с малой угловой скоростью вращения (порядка 300-400 об/мин), однако трение в резьбе гаек 9, 10 делается минимально возможным. При этом сухое трение определяется качеством самой резьбы, трением в резьбе, ее приработкой, а полужидкостное трение - вязкостью клея, наносимого на резьбу для фиксации. При выполнении таких условий шаговое смещение усов минимально и позволяет выйти в окончательно сбалансированное положение с максимальной степенью точности. Очевидно, что в дан ной подвижной системе в случае перехода, например, сбалансированного положения центр масс М сместится вправо от оси вращения и смещение усов 5, 6 начнется в противоположную сторону, возвращая центр масс в положение центра жесткости С, т.е. согласно самому принципу процесс балансировки устойчивый. Естественно, что повышение точности балансировки путем уменьшения угловой скорости вращения связано с увеличением времени сходимости балансировочного процесса, однако испытания показывают, что в худшем случае при получении максимальной точности время балансировки одного прибора не превышает 10-15 с. Однако, как показывают испытания, лучше после окончания процесса балансировки продолжать вращать прибор хотя бы минуту, чтобы клей немного взялся, после чего вращение прекратить и дать прибору 20-30 мин выдержки для окончания фиксации усов в сбалансированном положении подвижной системы. Конечно, после окончания процесса балансировки можно и не продолжать вращение в течение минуты, однако в этом случае к процессу остановки предъявляются дополнительные требования, а именно: остановка должна быть плавной без сообщения прибору значительных угловых ускорений, при которых усы могут сместиться из сбалансированного положения. Масса балансировочных противовесов 7, 8, а также расстояние от них до оси (плечо) выбирается из условия, чтобы даже при максимальной величине неуравновешенности, встречающейся у данного типа подвижных систем, этих грузов при максимально сдвинутых балансировочных усах хватило бы для
компенсации неуравновешенности. Самобалансировка происходит практически при любом режиме вращения. Однако для испытываемых подвижных систем приборовтипа
М1500/1 наиболее оптимальным по точности и времени балансировки является скорость вращения в диапазоне 1500-2000 об/мин. В качестве фиксирующего материала в принципе может быть применен любойбыстрозастывающий,
удовлетворяющий условиям эксплуатации клей. Однако для получения высокой точности балансировки должны предъявляться высокие требования к качеству резьбы, а
также необходим тщательный подбор клея: во-первых, он должен быть не очень вязким для получения необходимой точности балансировки при реальных угловых скоростях, а во-вторых, он должен яо
возможности быстрее фиксировать балансировочные усы. Наиболее полно тем и другим требованиям отвечает грунтовка типа АК-070. Проведенная балансировка предложенной подвижной системы обеспечивает
заданную для наиболее точных приборов степень точности, причем неурановешен- ность при такой балансировке не может быть выявлена известными способами контроля, заключающимися в наклонах прибора от нормального положения и т.п. Процесс балансировки предельно прост, полностью автоматизирован и может быть использован в серийно выпускаемых приборах самой высокой точности.
Формула изобретения Подвижная система электроизмерительного прибора, содержащая ось с закрепленными на ней подвижным элементом
со стрелочным указателем, и балансировочный узел в виде двух усов с противовесами на концах, отличающаяся тем, что, с целью повышения точности балансировки и технологичности системы, она снабжена
двумя гайками, размещенными на оси, выполненной с резьбовым участком, над стрелочным указателем, при этом каждый ус жестко закреплен в соответствующей гайке параллельно друг другу, а на резьбовом участке оси раслоложен слой фиксирующего материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 2003 |
|
RU2231036C1 |
| Стенд для балансировки подвижной части электроизмерительного прибора | 1983 |
|
SU1142743A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 2003 |
|
RU2230303C1 |
| Подвижная система магнитоэлектрического прибора | 1986 |
|
SU1347020A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 1998 |
|
RU2148806C1 |
| Подвижная система электромеханического прибора | 1982 |
|
SU1033972A1 |
| ПОДВИЖНАЯ СИСТЕМА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИБОРА | 1997 |
|
RU2144677C1 |
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| Устройство для наклона оптической оси камеры фототеодолита | 1986 |
|
SU1404825A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2005 |
|
RU2296308C1 |
Изобретение относится к измерительной технике и может быть использовано в серийных щитовых приборах. Цель изобретения - повышение точности балансировки подвижной системы прибора и увеличение технологичности ее конструкции. Подвижная система содержит ось 1 с установленным на ней подвижным элементом 2, на котором укреплен стрелочный указатель 3 с помощью держателя 4, а также балансировочный узел, выполненный в виде двух плоских усов 5, 6, на удаленных от оси концах которых закреплены противовесы 7, 8, а внутренние, обращенные к оси концы которых жестко закреплены на гайках 9,10, свободно навернутых одна над другой на резьбовой участок 11, выполненный на оси 1 над местом крепления указателя 3 к подвижному элементу 2 и покрытый слоем клея 12. Подвижную систему вращают на центрифуге при вертикальной ориентации оси, при этом балансировочные усы автоматически расходятся-сходятся, обеспечивая уравновешивание подвижной системы в поперечной плоскости, после чего усы автоматически фиксируются клеем в окончательном сбалансированном положении подвижной системы. 2 ил. сь ч| ч| О Јь О
Фиг.2
| Алукер Ш.М | |||
| Электрические измерения | |||
| М.: Колос, 1966, с | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
