При динамической балансировке тел вращения для определения величины дисбаланса на обычных балансировочных . машинах вначале находится графически масштаб показаний индикатора, а затем после новой гонки машины графически строится угол крепления противовеса относительно места крепления корректируюш,его груза.
Предлагаемое согласно изобретению устройство предназначено для непосредственного определения ве-t личины и местоположения требующегося балансировочного груза, определяемых по результатам испытаний, проведенных на балансировочной машине.
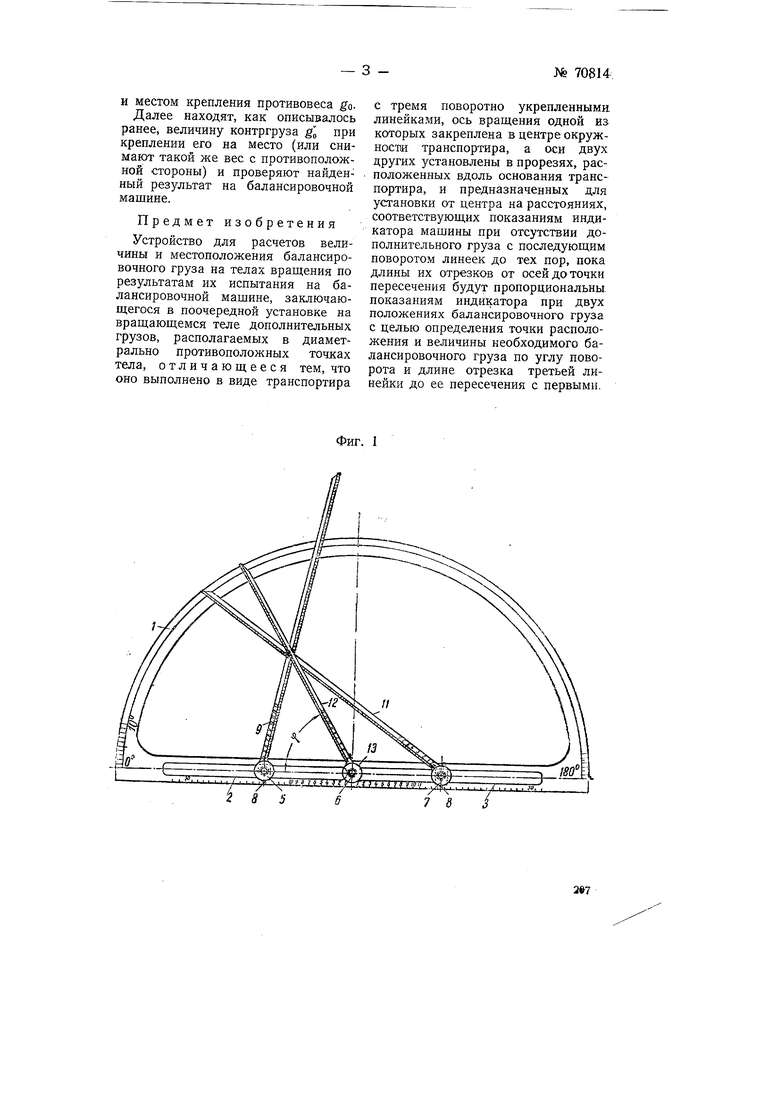
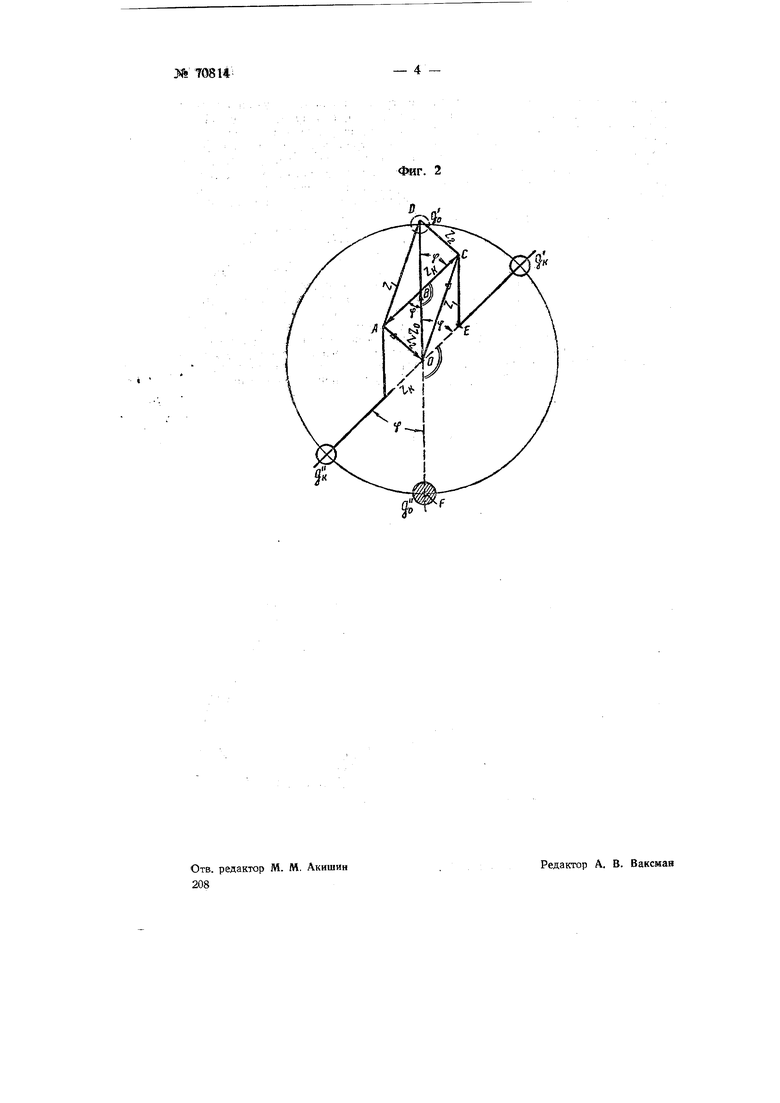
На фиг. 1 изображено предложенное устройство, а на фиг. 2 приведена диаграмма графического построения, поясняющего работу устройства.
Исходными данными для графического расчета (фиг. 2) величины и местоположения балансировочных грузов являются величины отклонений индикатора, замеряемые на одних и тех же резонансных оборотах: Zo - при вращении ротора без наклейки груза, Zi - при вращении ротора с приклеенным грузом, весом gk (корректирующий груз) и Zz - при вращении ротора с грузом весом gk-gk, приклеенным с противоположной стороны по отношению к месту, где приклеивался груз gk и на том же самом радиусе. Для определения масштаба -s г см одного деления индикатора необходимо знать, какое количество делений индикатора будет соответствовать дисбалансу лишь от одного корректирующего груза. Тогда масштаб выразится величиной:
If L Z Z 0,01 MM
где Die - дисбаланс, вызываемый корректирующим грузом, укрепленным на плече радиуса R. Помножая на полученный масштаб, мы можем определить искомую величину дисбаланса ротора и, наконец, определить величину контргруза gy
f , где DO - дисбаланс в г- см. к Величину R находим как медиану
205
треугольника, построенного по трем известным сторонам: 2Zo Z и Zg. При этом угол 9 между медианой и стороной АВ будет углом между местом крепления g и искомым местом крепления контргруза о, что видно из следующего.
Величина отклонения индикатора (или двойная стрела прогиба упругой опоры) при одном и том же резонансном числе оборотов будет пропорциональна возникающим неуравновещенным центробежным силам. Поэтому при дальнейших рассуждениях мы эти силы будем представлять в виде векторов, .пропорциональных отклонениям индикатора Zfl, Zi, Zz и Zft.
Приводя во вращение исследуемое тело на балансировочной мащине, находят величины Zo, Zi и Z.
На коррекционной плоскости ротора через точки крепления корректирующих грузов gk и g-fc и центр вращения проводят прямую, которая в данном случае будет направлением действия центробежных сил от грузов gk и dk.
Предположив, что направление неуравновещенных центробежных сил, создающих отклонения ZQ, Zi и Za, известны, из центра точки О строят три вектора Zs, ZQ, Zi. При соединении точки В с точками Л и С линии АВ и ВС будут являться отрезками одной прямой ЛС и равны между собой. Это объясняется тем, что линии АВ т ВС являются замыкающей стороной силовых треугольников ОАВ и ОВС и, следовательно, будут равны АВ ВС Z, В то же время по направлению они параллельны линии ОЕ и проходят через одну и ту же точку В.
В результате получается треугольник О АС. Проводя из точки А линию, параллельную ОС, и из точки С линию, параллельную ОА, получают точку D параллелограмма OADC. Затем проводят линию ОВ до точки D. OD является диагональю параллелограмма, а ОВ является половиной диагонали OD.
В треугольнике OCD по построению OD 2Zo, DG ZZ и ОС Zi,
а BC Zk.
206
Так как ВС параллельно ОЕ, т© угол: С ВО равен углу gh OF, а угол DBC равен углу ВОЕ.
Следовательно, в нашем треугольнике угол CBD, равный углу у, представляет собой угол между местом крепления корректирующего груза gk и искомым местом крепления контргруза g. Угол СВО, равный углу 180°- р, представляетсобой угол между центром места крепления корректирующего груза gh и центром найденного места крепления контргруза оСамо устройство, предложенное согласно изобретению, представляет собой транспортир 1. В перемычке транспортира 1 сделаны две прорези 2 и 3, снабженные по краям миллиметровой шкалой, в которых перемещаются движки 5 и 7. Движки 5 и 7 имеют индексную стрелку 8, при помощи которой центр движка устанавливается на нужное деление. В движках 5 и 7 закреплены оси с поворотно . сидящими на них линейками 9 и Л. Движки осей линеек фиксируются при помощи гаек с накатками.
В центре окружности транспортира закреплена ось 6, на которой вращается линейка 12. Линейка 12 фиксируется гайкой 13.
Работа с устройством осуществляется следующим образом.
Замеряют, как указано выще, величины Zo, Zi, Z2.
После установки на расстоянии. Zk от центра транспортира ;5 вижков 5 и 7 линейки 9 и 11 поворачивают на своих осях до их скрещения с таким расчетом, чтобы длины отрезков линеек от оси до места скрещения были равны: на линейке 9 величине Za, а на линейке 11 - величине Zi.
Линейку 12 поворачивают на оси 6 до пересечения с первыми двумя линейками таким образом, чтобы край линейки 12 с делениями проходил через точку пересечения линеек 9 и 11. Деление линейки 12, совпадающее с точкой пресечения, укажет величину R, а угол будет искомым углом между местом крепления корректирующего груза g
и местом крепления противовеса о. Далее находят, как описывалось ранее, величину контргруза gl при креплении его на место (или снимают такой же вес с противоположной стороны) и проверяют найденный результат на балансировочной машине.
Предмет изобретения
Устройство для расчетов величины и местоположения балансировочного груза на телах вращения по результатам их испытания на балансировочной машине, заключающегося в поочередной установке на вращающемся теле дополнительных грузов, располагаемых в диаметрально противоположных точках тела, отличающееся тем, что оно выполнено в виде транспортира
с тремя поворотно укрепленными линейками, ось вращения одной из которых закреплена в центре окружности транспортира, а оси двух других установлены в прорезях, расположенных вдоль основания транспортира, и предназначенных для установки от центра на расстояниях, соответствующих показаниям индикатора машины при отсутствии дополнительного груза с последующим поворотом линеек до тех пор, пока длины их отрезков от осей до точки пересечения будут пропорциональны показаниям индикатора при двух положениях балансировочного груза с целью определения точки расположения и величины необходимого балансировочного груза по углу поворота и длине отрезка третьей линейки до ее пересечения с первыми.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для статической балан-СиРОВКи шлифОВАльНыХ КРугОВ | 1979 |
|
SU849021A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ВОЗДУШНО-ВИНТОВОГО АГРЕГАТА СИЛОВОЙ УСТАНОВКИ НА САМОЛЕТЕ | 1992 |
|
RU2039958C1 |
| Вычислительное устройство | 1985 |
|
SU1330637A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО ДИСБАЛАНСА РОТОРА НА БАЛАНСИРОВОЧНЫХ НОЖАХ | 2015 |
|
RU2579830C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2013 |
|
RU2554666C2 |
| Прибор для расчета электрических цепей | 1945 |
|
SU68513A1 |
| СПОСОБ ВИБРАЦИОННОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2101689C1 |
| СПОСОБ ОЦЕНКИ ИЗНОСА ПОКРЫТИЙ И КАЧЕСТВА ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ МАШИН В РАЗЛИЧНЫХ СРЕДАХ | 2005 |
|
RU2308701C2 |
| Способ сборки вала трансмиссии | 2019 |
|
RU2744244C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
,.i±iitJi fi }; f-uf-ninr
/ хX -ч/
55в75/
Фиг. 2
