Изобретение относится к области радиолокационных технических средств распознавания класса стреляющих артиллерийских систем противника по результатам измерения текущих координат снаряда (мины, ракеты) на траектории.
Как следует из известных источников, в РЛС разведки огневых позиций артиллерии [1] производится распознавание стреляющих систем с классификацией целей на минометы, артиллерию и ракетные пусковые установки, но нет выделения класса реактивных систем залпового огня (РСЗО), которые в зарубежных РЛС классифицируется как артиллерия.
Известно устройство распознавания, реализованное в принятом на вооружение в Российской Армии изделии - РЛС обнаружения позиций стреляющих систем противника по выстрелу - "Зоопарк-1" (см. [2, 3]).
В известном устройстве измеренные в результате автосопровождения снаряда (ракеты, мины) на траектории его текущие координаты на восходящей ветви траектории сглаживаются, в результате чего находятся оценки координат, горизонтальные составляющие скорости и ускорения в любой точке интервала сопровождения. После чего производится расчет горизонтальных составляющих скорости и ускорения для середины интервала наблюдения. Далее по полученным оценкам горизонтальных составляющих скорости и ускорения для середины интервала наблюдения определяется значение баллистической функции [2].
Определение характера участка траектории - активный или пассивный - осуществляется по знаку баллистической функции. Для активного участка по предварительно выбранному порогу баллистической функции производится отнесение цели к 5 или 6 классам: 5 класс - тактические ракеты (активный участок), 6 класс - активно-реактивные снаряды, активно-реактивные мины (АРС, АРМ). Для пассивного участка траектории величины горизонтальных скоростей и ускорений используются для определения условных плотностей вероятности принадлежности наблюдаемой баллистической цели к каждому из четырех классов:
1 класс - гаубицы;
2 класс - минометы;
3 класс - РСЗО;
4 класс - тактические ракеты (пассивный участок).
Отнесение объекта к тому или иному классу осуществляется по максимуму условной плотности вероятности принадлежности наблюдаемой баллистической цели к одному из четырех классов.
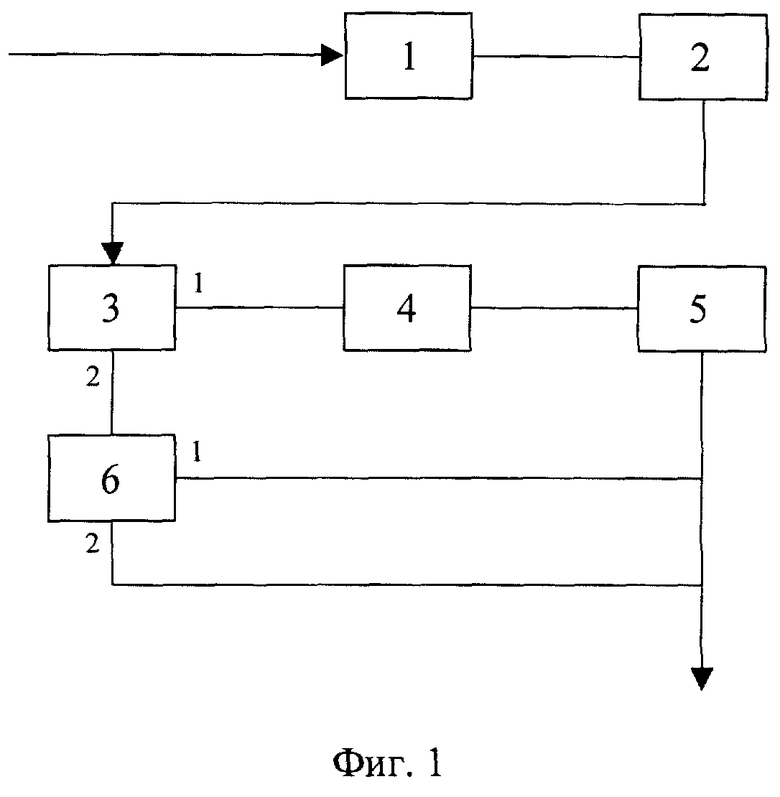
По сущности технического решения наиболее близким к предлагаемому устройству является устройство распознавания, реализованное в изделии "Зоопарк-1" [2, 3] и выбранное за прототип. Устройство распознавания, выбранное за прототип, приведено на фиг.1 в виде блок-схемы, описывающей последовательность решения отдельных задач [2] при распознавании класса стреляющих систем.
На фиг.1:
1 - блок сглаживания полученных прямоугольных координат траектории полета снаряда;
2 - блок преобразования сглаженных координат;
3 - первое пороговое устройство;
4 - блок памяти условных плотностей вероятности принадлежности цели к каждому из четырех классов;
5 - блок определения максимума условной плотности вероятности принадлежности цели к одному из четырех классов;
6 - второе пороговое устройство.
Устройство, принятое за прототип, работает следующим образом.
В блоке 1 по поступающим текущим прямоугольным координатам траектории полета снаряда осуществляется расчет сглаженных оценок прямоугольных координат, скоростей и ускорений снаряда для конца интервала наблюдения путем фильтрации полиномом второго порядка ([4], [2] п.3.8).
В блоке преобразования 2 производится:
- пересчет ([2] п.3.9) полученных для конца интервала наблюдения сглаженных оценок прямоугольных координат, скоростей и ускорений в середину интервала наблюдения по полиному второй степени:
Нср=Нкон-Vн кон·(N-1)/2+Wн кон·(N-1)2/2;
Vнср=(Vн кон-Wн кон·(N-1)/2)/Δt;
Wнср=Wн кон/Δt2;
где Нкон, Vн кон, Wн кон - оценки прямоугольных координат, скоростей и ускорений снаряда для конца интервала наблюдения, полученные после сглаживания;
Δt - шаг съема координат на траектории;
N - число сглаженных точек на интервале наблюдения.
Для координат Хср и Yср все вычисления аналогичны.
- расчет параметров распознавания - горизонтальных составляющих скорости Vг и ускорения Wг для середины интервала наблюдения:
Wг=(Vхср·Wхср+Vуср·Wуср)/Vг.
- расчет величины Е ([5], [2], п.3.9), названной в [2] баллистической функцией:
E=-Wг/Vг.
После чего в первом пороговом устройстве 3 анализируется знак баллистической функции Е ([2], п.3.13.1).
Если Е≥0, управление передается на блок памяти 4, где хранятся константы, значения которых равны условным плотностям вероятности принадлежности полученных значений горизонтальных составляющих скорости и ускорения к каждому из четырех классов ([2], таблицы п.3.13.2). В блоке определения максимума 5 определяется принадлежность цели к соответствующему классу по максимуму условной плотности вероятности ([2], п.3.13.2).
Если Е≥0, управление передается на блок памяти 4, где хранятся константы, значения которых равны условным плотностям вероятности принадлежности полученных значений горизонтальных составляющих скорости и ускорения к каждому из четырех классов ([2], п.3.13.2). В блоке определения максимума 5 определяется принадлежность цели к соответствующему классу по максимальной условной плотности вероятности принадлежности цели к одному из четырех классов.
Если Е<0, управление передается на второе пороговое устройство 6, где в соответствии с предварительно выбранным порогом баллистической функции производится отнесение цели к 5 или 6 классу.
Однако существенное влияние на достоверность распознавания класса стреляющей системы оказывают величины среднеквадратических ошибок определения горизонтальных составляющих скорости и ускорения. Прежде всего, это касается горизонтальной составляющей ускорения, среднеквадратическая ошибка определения которого может быть до 40% от ее истинной величины. Кроме того, современные артиллерийские снаряды имеют начальные скорости полета, сопоставимые со скоростями реактивных снарядов на конце активного участка, что в совокупности с ошибками в определении горизонтальных скоростей и ускорений приводит к ошибкам в определении класса стреляющих систем (перепутывание классов). Недостатками прототипа являются перечисленные выше факты, приводящие к снижению вероятности распознавания стреляющих систем, относящихся к 1 или 3 классам.
Целью настоящего изобретения и техническим результатом является повышение достоверности распознавания целей, относящихся к 1 или 3 классам.
Указанная цель достигается тем, что в качестве дополнительных признаков распознавания рассматриваются признак возрастания (убывания) скорости полета снаряда и ее величина в средней точке участка наблюдения. Участок наблюдения реактивных снарядов приходится либо на конец активного участка и в этом случае скорость снаряда возрастает, что однозначно свидетельствует о принадлежности цели к третьему классу, либо на пассивный участок наблюдения реактивного снаряда, следующий непосредственно после набора снарядом максимальной скорости. В последнем случае снаряды ствольной артиллерии по достижении этого же участка наблюдения теряют до 30% от своей начальной скорости (скорости выстреливания).
В случае если предварительное распознавание, согласно известному техническому решению [2], по величине баллистической функции и по максимуму условной плотности вероятности принадлежности цели к одному из четырех классов показало принадлежность цели к 2, 4, 5 или 6 классу, дополнительное распознавание не проводится, так как вероятность распознавания этих классов, как показал опыт, является достаточно высокой. Если же предварительное распознавание показало принадлежность цели к первому (артиллерия) или третьему (РСЗО) классам, производится дополнительное уточнение принадлежности цели к первому или третьему классам.
При автосопровождении определение радиальной скорости движения снаряда на траектории относительно РЛС осуществляется по значению доплеровской частоты сигнала. Значения доплеровской частоты возрастают при возрастании значений скорости, что однозначно свидетельствует о наличии активного участка траектории (во время работы двигателя происходит возрастание скорости полета снаряда), т.е. о принадлежности цели к третьему классу. В случае убывания значений доплеровской частоты - цель находится на пассивном участке траектории - производится дополнительный анализ скорости полета снаряда в средней точке участка наблюдения. Если скорость снаряда в середине участка наблюдения меньше порогового значения, цель принадлежит к 1 классу, в противном случае класс цели берется равным полученному после предварительного распознавания.
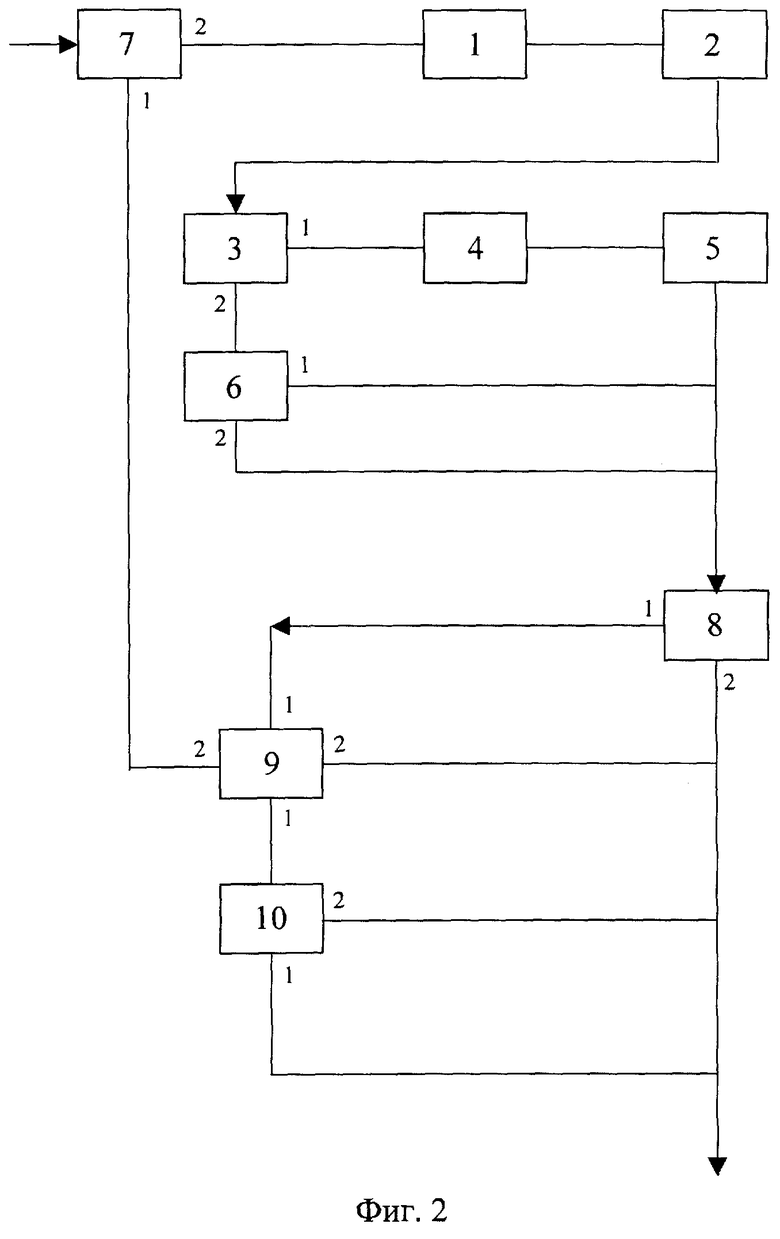
На фиг.2 изображена схема предлагаемого устройства, позволяющего производить распознавание класса разведанных целей.
Устройство включает в себя следующие блоки:
1 - блок сглаживания полученных прямоугольных координат траектории полета снаряда;
2 - блок преобразования сглаженных координат;
3 - первое пороговое устройство;
4 - блок памяти условных плотностей вероятности принадлежности цели к каждому из четырех классов;
5 - блок определения максимума условной плотности вероятности принадлежности цели к одному из четырех классов;
6 - второе пороговое устройство;
7 - запоминающее устройство;
8 - устройство сравнения;
9 - блок анализа возрастания значений доплеровской частоты;
10 - третье пороговое устройство.
Заявляемое устройство работает следующим образом.
В процессе автосопровождения текущие прямоугольные координаты траектории полета снаряда и значения доплеровской частоты сигнала поступают на вход блока 7, где запоминаются значения доплеровской частоты сигнала и с первого выхода передаются на второй вход блока анализа возрастания значений доплеровской частоты 9, а прямоугольные координаты траектории полета снаряда со второго выхода блока 7 передаются на вход блока сглаживания 1. Далее в блоке 1 прямоугольные координаты траектории полета снаряда сглаживаются, в результате чего получаются сглаженные оценки прямоугольных координат, скоростей и ускорений снаряда в конце интервала наблюдения. В блоке преобразования 2 осуществляется пересчет прямоугольных координат траектории полета снаряда, скоростей и ускорений снаряда в середину интервала наблюдения, расчет горизонтальных составляющих скоростей и ускорений в середине интервала наблюдения, а также расчет баллистической функции Е. После чего в первом пороговом устройстве 3 анализируется знак баллистической функции Е.
Если Е≥0, управление передается на блок памяти 4, где хранятся константы, значения которых равны условным плотностям вероятности принадлежности полученных значений горизонтальных составляющих скорости и ускорения к каждому из четырех классов (1, 2, 3 или 4) [2]. В блоке определения максимума 5 определяется принадлежность цели к соответствующему классу по максимальной условной плотности вероятности принадлежности цели к одному из четырех классов, после чего управление передается устройству сравнения 8.
Если Е<0, управление передается на второе пороговое устройство 6, где в соответствии с предварительно выбранным порогом баллистической функции производится отнесение цели к 5 или 6 классу, после чего управление также передается на устройство сравнения 8.
В устройстве сравнения 8 анализируется принадлежность цели к 1 или 3 классам. Если цель относится к 2, 4, 5 или 6 классам, распознавание класса цели считается выполненным. Если цель относится к 1 или 3 классу, управление передается на первый вход блока 9, где анализируется наличие возрастания значений доплеровской частоты, поступивших на второй вход блока 9 с первого выхода запоминающего устройства 7. Если значения доплеровской частоты возрастают, цель принадлежит к 3 классу и распознавание класса цели считается выполненным, в противном случае управление передается на третье пороговое устройство 10, где производится сравнение скорости снаряда в средней точке участка наблюдения Vcp с пороговым значением Vпорог.
Если Vcp<Vпорог - цель принадлежит к 1 классу и распознавание класса цели считается выполненным, в противном случае (Vcp ≥ Vпорог) - распознавание цели считается выполненным, класс цели не изменяется и остается равным полученному на этапе предварительного распознавания. Пороговое значение скорости Vпорог определяется с помощью математического моделирования и по результатам экспериментальных испытаний (стрельб) с учетом тактики ведения боевых действий (взаимного расположения огневых позиций и РЛС, способа ведения огня и т.д.).
Использование заявляемого устройства, как показали расчеты, проведенные на модели, и по имеющимся в распоряжении авторов записям реальных траекторных измерений полета снарядов, повышает эффективность распознавания класса стреляющих систем противника по сравнению с устройством аналогичного назначения (прототип) на 30% за счет того, что введены дополнительные признаки распознавания:
- возрастание (убывание) значений доплеровской частоты сигнала от движущегося объекта;
- анализ скорости движущегося объекта в средней точке участка наблюдения.
Повышение достоверности распознавания класса стреляющих систем противника позволяет точнее вырабатывать требования к количеству и типу расходуемых боеприпасов при постановке задачи на поражение разведанной цели. Это все снижает расход боеприпасов при стрельбе на поражение разведанной цели.
Источники информации
1. Jane's IDR, July, 1997, C.37-42; ADJ: ASIAN DEFENCE JOURNAL, март 2001, c.20-23.
2. БД. 00001-03 13 01 ЛУ, с.105-112, с.125-131.
3. Оружие России, каталог, т. I, Вооружение Сухопутных Войск, 1996-1997 гг., АО "Милитэри Пэрэйд", 1996-1997 гг., Москва, с.106-107.
4. Амиантов И.Н. Избранные вопросы статистической теории связи, М.: Советское радио, 1971, с.142-144.
5. Дмитриевский А.А. Внешняя баллистика, М.: Машиностроение, 1979, с.321.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2005 |
|
RU2295739C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2011 |
|
RU2500000C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ, НЕ ЯВЛЯЮЩИХСЯ ОБЪЕКТАМИ РАЗВЕДКИ | 2019 |
|
RU2726189C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КАЛИБРА СТРЕЛЯЮЩЕГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ ПО ПАРАМЕТРАМ СПЕКТРАЛЬНЫХ СОСТАВЛЯЮЩИХ ПРЕЦЕССИЙ И НУТАЦИЙ | 2013 |
|
RU2553419C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2004 |
|
RU2265233C1 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКИХ ЦЕЛЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК ИХ ПУСКА И ПАДЕНИЯ ДЛЯ ОБЗОРНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2016 |
|
RU2612029C1 |
| Способ борьбы с артиллерией противника | 2018 |
|
RU2694421C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДЛИТЕЛЬНОСТИ ИНТЕРВАЛА СОПРОВОЖДЕНИЯ ЦЕЛИ | 2018 |
|
RU2703277C1 |
| Способ дальнего обнаружения и распознавания малозаметных воздушных целей | 2022 |
|
RU2802089C1 |
Изобретение относится к радиолокационной технике и может быть использовано в РЛС разведки для распознавания класса стреляющих систем противника по результатам измерения текущих координат снаряда (мины, ракеты) на траектории. Достигаемый технический результат - повышение вероятности правильного распознавания стреляющих систем. Сущность изобретения заключается в том, что в состав известного устройства, содержащего последовательно соединенные блок сглаживания, блок преобразования сглаженных параметров движения цели, первое пороговое устройство, блок памяти, блок определения максимума, а также второе пороговое устройство, дополнительно введены запоминающее устройство, последовательно соединенные устройство сравнения, блок анализа возрастания значений доплеровской частоты и третье пороговое устройство. Использование заявляемого устройства повышает эффективность распознавания класса стреляющих систем противника по сравнению с устройством аналогичного назначения на 30%. Повышение достоверности распознавания класса стреляющих систем противника позволяет точнее вырабатывать требования к количеству и типу расходуемых боеприпасов при постановке задачи на поражение разведанной цели. 2 ил.
Устройство распознавания стреляющих систем, содержащее последовательно соединенные блок сглаживания, блок преобразования сглаженных параметров движения цели, первое пороговое устройство, блок памяти, блок определения максимума, а также второе пороговое устройство, вход которого подключен ко второму выходу первого порогового устройства, а первый и второй выходы второго порогового устройства и выход блока определения максимума объединены между собой, отличающееся тем, что в него введены запоминающее устройство, последовательно соединенные устройство сравнения, блок анализа возрастания значении доплеровской частоты и третье пороговое устройство, при этом вход запоминающего устройства является входом по измеренным текущим координатам и по значениям доплеровской частоты, первый выход запоминающего устройства соединен со вторым входом блока анализа возрастания значений доплеровской частоты, а второй выход подключен к входу блока сглаживания, вход устройства сравнения соединен с объединенными выходами блока определения максимума и второго порогового устройства, первый выход устройства сравнения подключен к первому входу блока анализа возрастания значений доплеровской частоты, первый выход которого подсоединен к входу третьего порогового устройства, при этом второй выход устройства сравнения объединен со вторым выходом блока анализа значений доплеровской частоты, первым и вторым выходами третьего порогового устройства и является выходом устройства.
| Оружие России | |||
| Каталог | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вооружение сухопутных войск, 1996-1977 гг | |||
| - М.: АО "Милитэри Пэрэйд", с.106-108 | |||
| RU 96123485 А, 10.02.1999 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 1995 |
|
RU2096829C1 |
| US 6087972 А, 11.07.2000 | |||
| US 6069561 А, 30.05.2000. | |||

