Изобретения относится к области автоматизации информационных систем управления и контроля, функционирующих в реальном масштабе времени, для определения координат артиллерии противника и прогнозирования маршрутов ее движения по пересеченной местности в сложной динамично развивающейся обстановке.
Известен способ определения параметров траектории целей в обзорных РЛС (см. Пат. РФ №2466423, МПК G01S 13/42 (2006.01), опубл. 10.08.2012, бюл. №22. Аналог предполагает прием эхо-сигнала  регистрацию его квадратурных составляющих, запоминание, формирование
регистрацию его квадратурных составляющих, запоминание, формирование  матрицы опорных сигналов
матрицы опорных сигналов  умножение принятого эхо-сигнала на каждый элемент матрицы опорных сигналов, суммирование одноименных элементов матрицы опорных сигналов, нахождения модуля элементов матрицы результирующего сигнала Uk, определение элемента, при котором достигается максимум результирующего сигнала, расчет тангенциальной, радиальной и линейной скорости цели, расчет курсового угла цели.
умножение принятого эхо-сигнала на каждый элемент матрицы опорных сигналов, суммирование одноименных элементов матрицы опорных сигналов, нахождения модуля элементов матрицы результирующего сигнала Uk, определение элемента, при котором достигается максимум результирующего сигнала, расчет тангенциальной, радиальной и линейной скорости цели, расчет курсового угла цели.
Способ-аналог обеспечивает измерение радиальной, тангенциальной и линейной скорости цели, расчет курсового угла цели при сокращении объекта вычислений. Однако ему присущ недостаток, связанный с отсутствием возможности определения координат исходной и конечной точке траектории движения цели (снаряда).
Известен способ определения местоположения артиллерии противника и устройство для его осуществления (см. Пат. РФ №2624483, МПК G01S 5/18 (2008.01), F41H 13/00 (2006.01), опубл. 04.07.2017, бюл. №19). Аналог предполагает точную регистрацию времени прихода звука выстрела на пространственно-распределенные датчики звука, оцифровку принятого сигнала, запись, анализ и дальнейшую обработку в преобразователе Фурье для получения Фурье-образа, расчет расстояния и угол прихода источника выстрела, определение типа орудия по усредненному значению Фурье-образа, корректировку результата за счет уточнения скорости звука и рельефа местности.
Аналог реализует способ акустической пассивной локации, позволяющей определить координаты местоположения наземных и надводных артиллерийских орудий противника. Однако способу присущи недостатки, ограничивающие его применение. В условиях массированного применения артиллерии обеими сторонами эффективность способа резко падает из-за возрастания шумовых помех. Кроме того, дальность действия способа - аналога ограничена и зависит от уровня шумового фона. Кроме того, имеют место ограничения по выбору районов развертывания измерителей.
Наиболее близким по своей технической сущности является способ прямого наведения вооружения на цель (см. Пат. РФ №2239766, МПК F41G 3/00, (2000.01), опубл. 10.11.2004, бюл. №31).
Способ предполагает прямое наведение вооружения на цель при произвольном размещении командира и вооружения оператора на местности, включающий совместное ориентирование средств разведки командира и вооружения оператора на местности относительно географических координат, последовательное обнаружение и сопровождение цели командиром с помощью средств разведки и наблюдения, ввод координат цели в пульт управления командира, назначение командиром на его пульте управления выбранной цели для поражения оператором вооружения, расчет в пульте управления командира координат азимута и дальности до цели относительно местоположения вооружения оператора, передачу оператору вооружения команды на нацеливание и координат цели, нацеливание оператором вооружения на цель в два этапа, причем сначала нацеливание оператора вооружения производят относительно совместных ориентиров, затем по отклонениям цели от центра визирования вооружения, после расчета координат азимута и дальности до цели относительно местоположения вооружения до передачи оператору вооружения команды на нацеливание и координат цели, осуществляют последовательно автоматическую проверку видимости цели с позиции оператора вооружения с использованием электронной карты местности и прогнозирование по электронной карте местности угла места цели относительно вооружения оператора, при этом оператору вооружения, помимо передачи значений азимута и дальности до цели, осуществляют передачу значения угла места цели относительно местоположения вооружения оператора, а нацеливание вооружения на цель на первом этапе оператор выполняет относительно совместных ориентиров по значениям азимута и угла места цели.
Протокол обеспечивает увеличение точности наведения вооружения на цель и сокращение времени целеуказания. Однако ему присущи недостатки, ограничивающие его применение:
отсутствует возможность определения координат исходной и конечной точек траектории движения цели (снаряда);
практически невозможно определение характеристик движущейся цели (калибр и тип снаряда, тип артиллерийской установки);
прототип сохраняет работоспособность только в условиях прямой видимости цели;
усложняет определение характеристик групповых целей (количество используемых в артналете орудий противника, необходимую площадь для позиционного района их размещения);
не проводится анализ тактических и инженерных свойств местности заданного района, позволяющих повысить точность определения координат местоположения артиллерии противника.
Задачей заявленного технического решения является повышение точности определения текущих координат артиллерии противника за счет учета определенных руководящими документами последовательности ее действий после нанесения огневого удара путем сравнения временных затрат на цикл анализа и управления огнем артиллерии контрбатарейной борьбы и временных затрат на сворачивание и покидание позиционного района артиллерией противника, учета тактических и инженерных свойств местности, комбинирования средств мониторинга с использованием беспилотного летательного аппарата видовой разведки.
Указанная задача решается за счет того, что в известном способе, включающем фиксирование координат средств разведки командира и вооружения оператора, обнаружение на ранней стадии полета и выполнение нескольких измерений текущего положения снаряда с целью расчета траектории его полета, введение координат цели в пульт управления командира, назначение цели для поражения, расчет на пульте управления командира азимута θk, дальности dk и угла места βk до цели относительно местоположения вооружения оператора, передачу оператору вооружения команды на нацеливание (θk, dk, βk) и координат цели (X,Y)k, k=1, 2, …, K, дополнительно на подготовительном этапе на пульте управления командира определяют границы района сбора информации на цифровой карте геоинформационной системы, делят район сбора информации на элементарные участки, оценивают проходимость элементарных участков района сбора информации и их пригодность для развертывания артиллерии I различных классов по тактическим свойствам местности и инженерным признакам, определяют элементарные участки района сбора информации, в которых возможно перемещение определенного i-го класса артиллерии, i=1, 2, …, I, исключают из анализа непроходимые элементарные участки района сбора информации, на основе результатов выполненного анализа формируют и запоминают для каждого i-го класса артиллерии, i=1, 2, …, I, соответствующий слой Ai электронной карты района сбора информации, анализируют элементарные участки района сбора информации на возможность развертывания артиллерии различных классов, по совокупности пригодных взаимно прилегающих элементарных участков района сбора информации определяют их пригодность для использования в качестве позиционных районов артиллерийских подразделений для каждого j-го уровня, i=1, 2, …, J, каждого i-го класса артиллерии, i=1, 2, …, I, на основе результатов выполненного анализа формируют и запоминают соответствующий слой Aij электронной карты района сбора информации для каждого j-го подразделения: отделение, взвод, батарея, дивизион каждого i-го класса артиллерии, а в процессе боевой работы фиксируют время обнаружения полета снаряда t0, пролонгируют и экстраполируют траекторию полета снаряда с целью определения местоположения артиллерийских средств противника (X,Y)ki, калибра снаряда и класса стреляющего орудия, а в условиях близких к одновременному обнаружению в полете нескольких снарядов с общей траекторией принимают решение о участии в огневом воздействии j-го артиллерийского подразделения противника, определяют необходимую площадь  для развертывания обнаруженного артиллерийского подразделения противника, на основе слоя Aij электронной карты уточняют вычисленные координаты
для развертывания обнаруженного артиллерийского подразделения противника, на основе слоя Aij электронной карты уточняют вычисленные координаты  местоположения артиллерии противника с учетом пригодности площади позиционного района, его доступности и возможности для развертывания j-го подразделения i-го класса артиллерии, определяют необходимое количество артиллерийских орудий и снарядов вооружения оператора для поражения j-го артиллерийского подразделения противника, определяют необходимые временные затраты на цикл управления и огневого воздействия:
местоположения артиллерии противника с учетом пригодности площади позиционного района, его доступности и возможности для развертывания j-го подразделения i-го класса артиллерии, определяют необходимое количество артиллерийских орудий и снарядов вооружения оператора для поражения j-го артиллерийского подразделения противника, определяют необходимые временные затраты на цикл управления и огневого воздействия:
t∑ = tорб + tпр.реш + tпрд + tвозд,
где topб - время сбора и обработки данных о местоположении, типе, количестве огневых средств противника, необходимых размерах позиционного района ,
tпр.реш - временные затраты на принятие решения о поражении k(ij)-й цели, определение количества привлекаемых на это орудий и снарядов вооружения оператора, определение необходимой ориентации привлекаемой артиллерии в горизонтальной θk и вертикальной βk областях, тип используемых снарядов, tпрд - время доведения решения командира до исполнителей, tвозд - длительность подготовки и нанесения огневого удара, определяют временные затраты на свертывание артиллерийского подразделения противника и покидание позиционного района  сравнивают знания временных затрат t∑ и при выполнении неравенства
сравнивают знания временных затрат t∑ и при выполнении неравенства  , наносят огневой удар по позиционному району артиллерии противника с координатами
, наносят огневой удар по позиционному району артиллерии противника с координатами  в противном случае когда на основе соответствующего Ai-го слоя электронной карты района сбора информации определяют возможные направления и скорость перемещения k(ij)-го подразделения артиллерии противника, вычисляют возможные текущие координаты k(ij)-го подразделения артиллерии противника, по которым наносят огневой удар.
в противном случае когда на основе соответствующего Ai-го слоя электронной карты района сбора информации определяют возможные направления и скорость перемещения k(ij)-го подразделения артиллерии противника, вычисляют возможные текущие координаты k(ij)-го подразделения артиллерии противника, по которым наносят огневой удар.
При наличии дежурного находящегося в воздухе беспилотного летательного аппарата видовой разведки направляют его в этот район для уточнения координат k(ij)-го артиллерийского подразделения противника, по которым наносят огневой удар и уточняют его результаты. В качестве беспилотного летательного аппарата видовой разведки может быть использован «Орлан-10» производства ООО «Специальный Технологический Центр» г. Санкт-Петербург.
В качестве средства разведки командира используют радиолокационную станцию контрбатарейной борьбы или пассивный акустический локатор.
Благодаря новой совокупности существенных признаков в заявляемом способе обеспечивается определение текущих координат объектов артиллерии противника за счет экстраполяции траектории полета артиллерийских снарядов, а повышение точностных характеристик способа достигают за счет прогнозирования последующих действий артиллерии противника путем сравнения временных затрат противоборствующих сторон, учету тактических и инженерных свойств местности и комбинированию средств разведки (совместному использованию РЛС КББ и БЛА видовой разведки).
Заявляемый способ поясняется чертежами, на которых показаны:
на фиг. 1 - взаимодействие командира и оператора вооружения при организации контрбатарейной борьбы;
на фиг. 2 - обобщенный алгоритм борьбы с артиллерией противника;
на фиг. 3 - фрагмент местности, разбитый на элементарные участки;
на фиг. 4 - модель тактических свойств местности района сбора информации для одного из классов артиллерии;
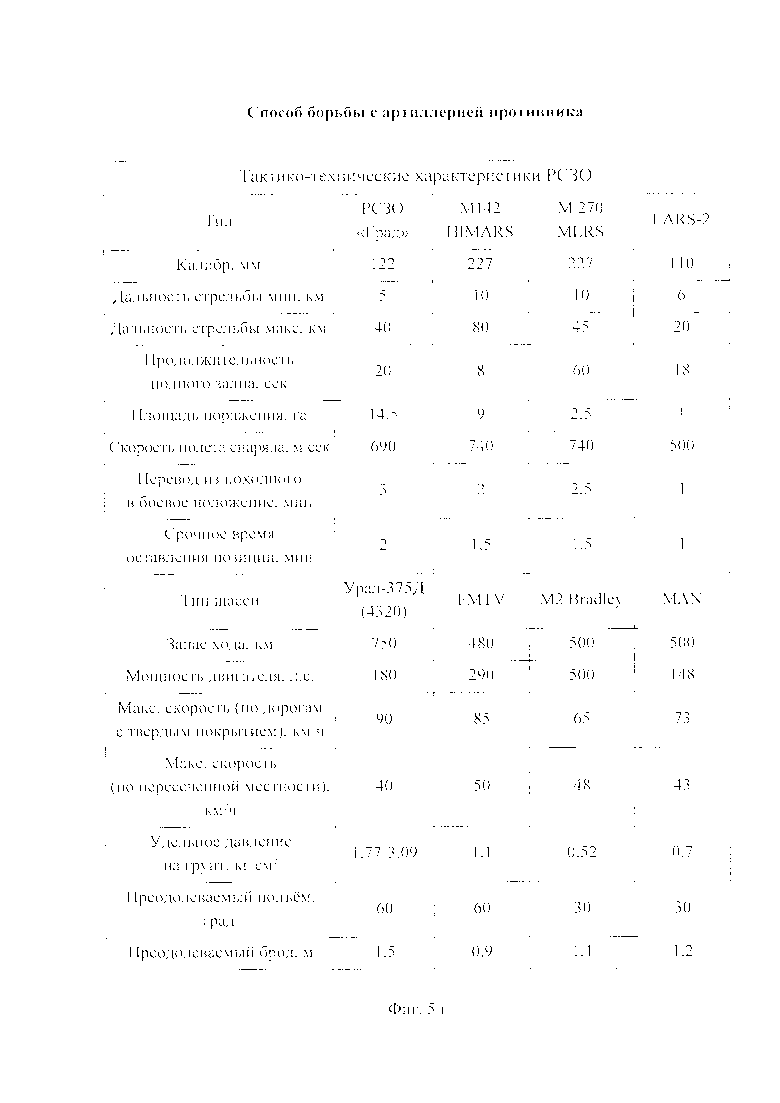
на фиг. 5 - тактико-технические характеристики:
а) буксируемой артиллерии;
б) самоходных артиллерийских установок;
в) самоходных минометов;
г) ракетных систем залпового огня;
на фиг. 6 - характеристики местности, учитываемые при размещении различных классов артиллерии;
на фиг. 7 - варианты пригодности элементарных участков для размещения артиллерийских подразделений и соответствующие им обобщенные (квазиметрические) оценки;
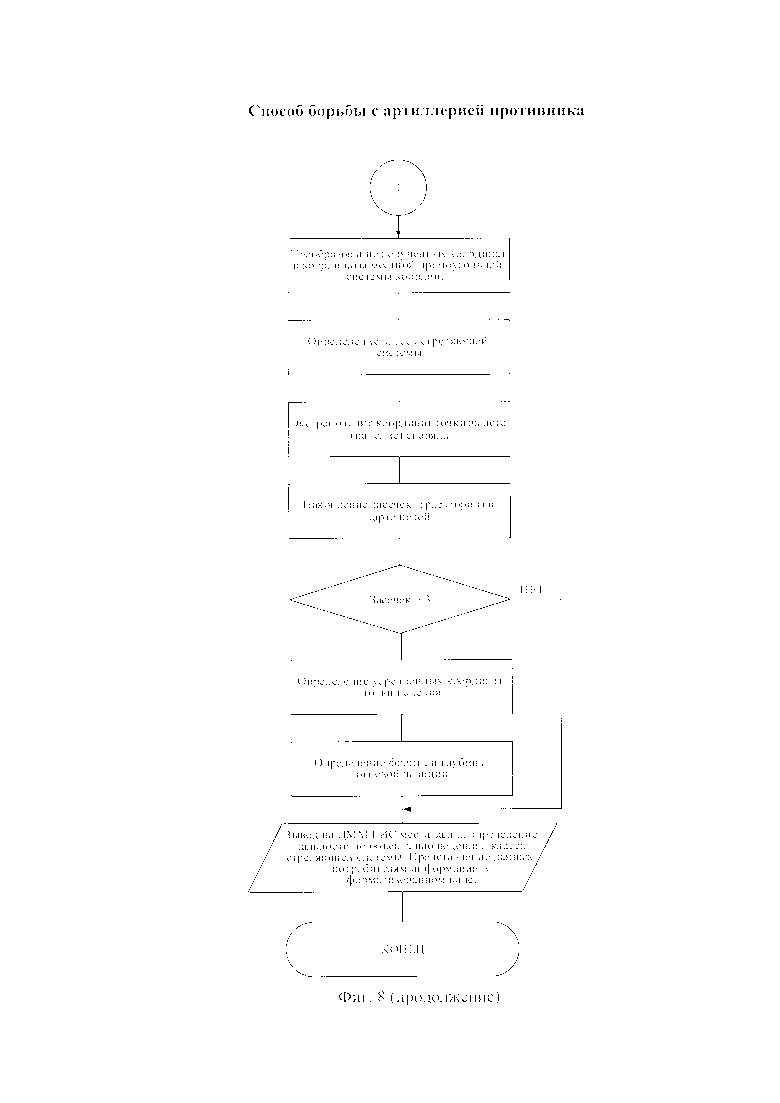
на фиг. 8 - алгоритм работы радиолокационной станции контрбатарейной борьбы;
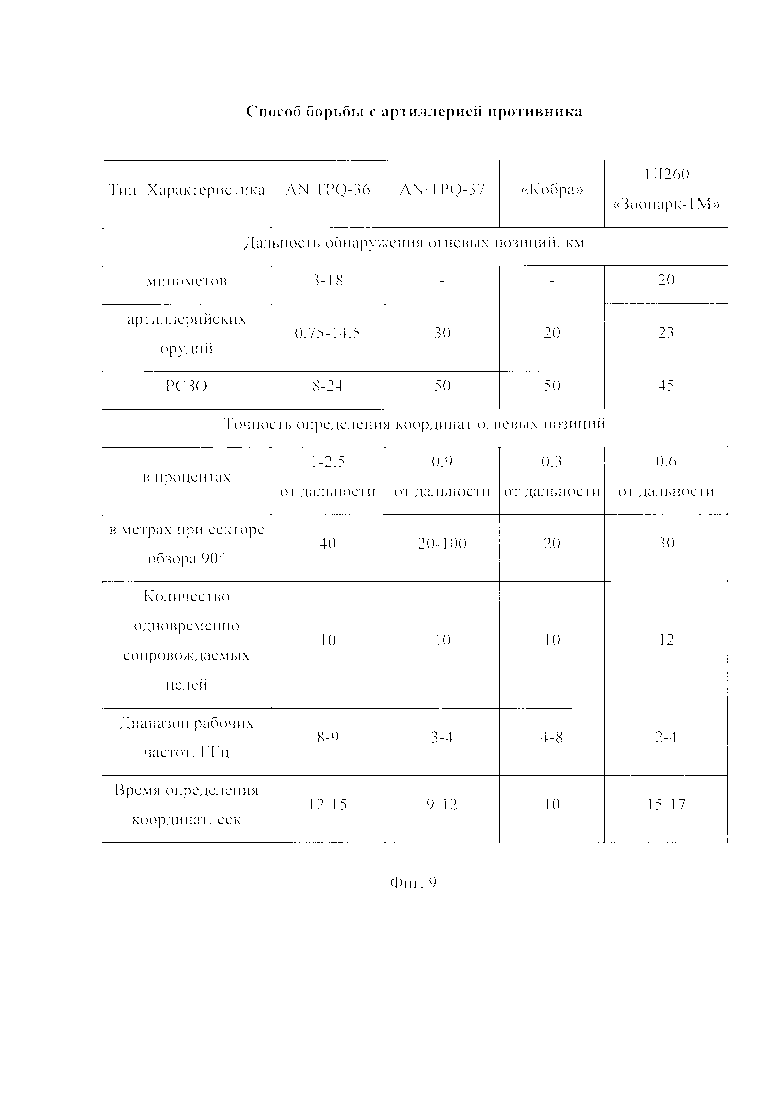
на фиг. 9 - основные характеристики некоторых радиолокационных станций контрбатарейной борьбы;
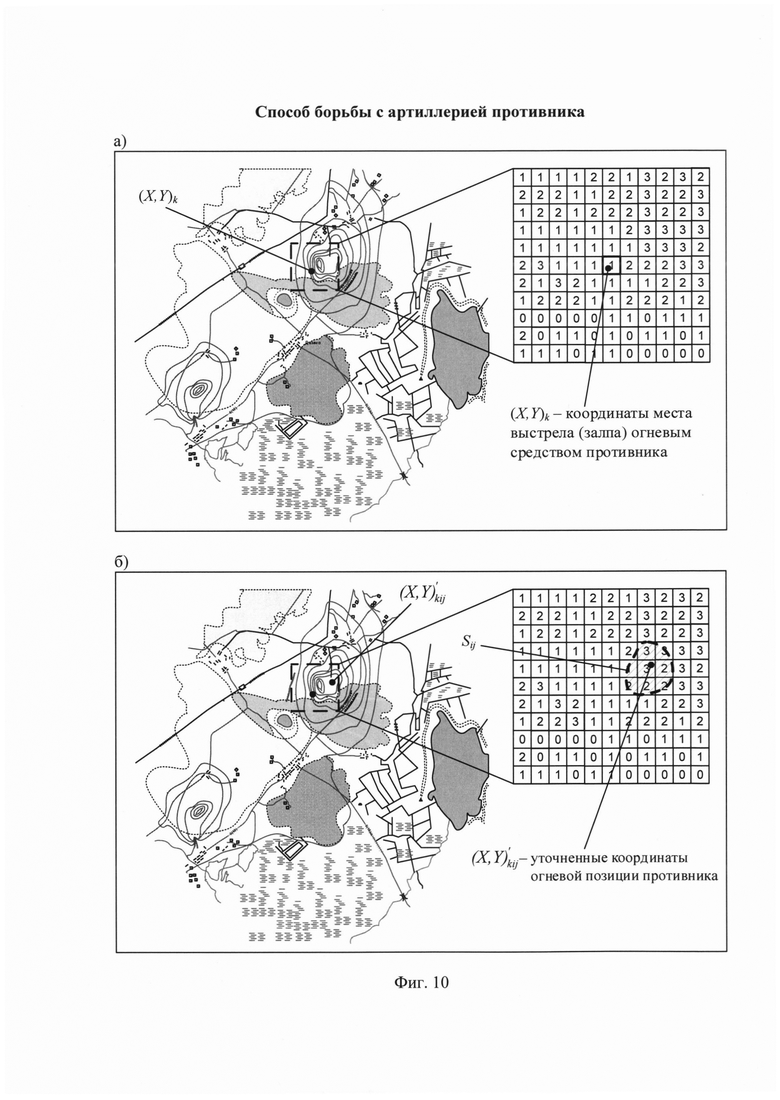
на фиг. 10 - порядок уточнения координат  артиллерии противника:
артиллерии противника:
а) координаты огневой позиции (X,Y)k без учета местных условий;
б) уточненные координаты огневой позиции учитывающие особенности рельефа местности;
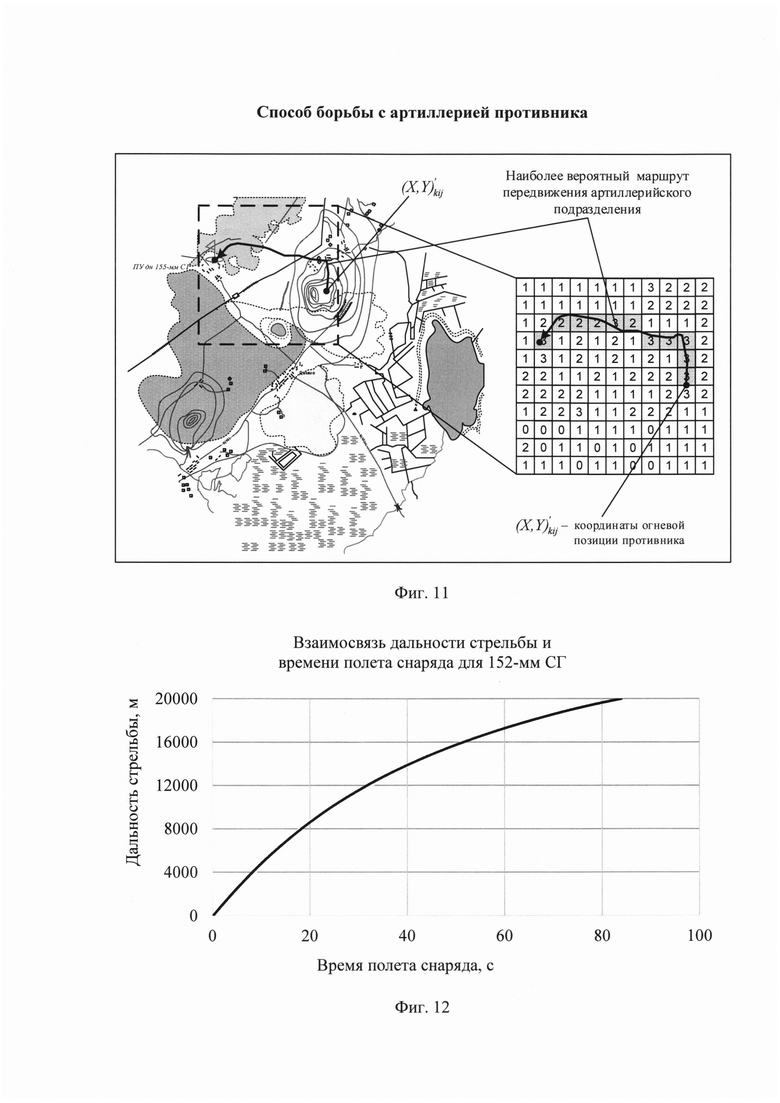
на фиг. 11 - возможный маршрут движения j-ro артиллерийского подразделения при покидании позиционного района;
на фиг. 12 - взаимосвязь дальности стрельбы 152 мм самоходной гаубицы и времени полета снаряда.
Сущность изобретения состоит в следующем (см. фиг. 1). В настоящее время находят применение три подхода по определению координат артиллерии противника, основанные на их физическом проявлении. Это световая вспышка при выстреле орудия (используется в ночное время), звук от выстрела орудия и летящего снаряда (базируется на использовании пассивных акустических локаторов) и использовании радиолокационных станций контрбатарейной борьбы (РЛС КББ). Принцип работы РЛС КББ основан на засечке артиллерийских средств поражения на ранней стадии полета снаряда и проведении нескольких измерений текущего положения боеприпаса с целью расчета его траектории. На основе экстраполяции полученных измерений определяют местоположение огневых средств и места возможного попадания боеприпасов. Учет тактических и инженерных свойств местности заданного района обеспечивает повышение точности определения координат артиллерии противника. Учет временных затрат противоборствующих сторон (длительность огневого удара и покидание позиционного района относительно затрат на анализ и нанесение ответного огневого удара) позволяет принять адекватное с ситуацией решение. В противном случае ответный огневой удар наносится по опустевшему позиционному району противника. Определение временных затрат на цикл управления, анализ рельефа местности, скорость перемещения артиллерии противника по наиболее вероятному маршруту движения позволяет уточнить текущее местоположение подразделения артиллерии противника. Координаты последнего могут быть дополнительно уточнены с борта БЛА видовой разведки, направленного в этот район.
На фиг. 1 показан упрощенный порядок взаимодействия командира и оператора вооружения при организации контрбатарейной борьбы. После выстрела (залпа) артиллерии противника 1 с помощью РЛС КББ 2 отслеживают траекторию полета снаряда, определяют местоположение огневого средства противника (X,Y)kij. Полученная в 2 информация по каналу связи 4 доводится до командира 5. Командир 5 на основе полученных от 2 сведений с использованием геоинформационной системы анализирует сложившуюся оперативную ситуацию, уточняет местоположение артиллерийских средств 1 и принимает решение на их уничтожение, определяя при этом комплект задействованного вооружения оператора 9. Принятое решение командир 5 доводит до оператора вооружения 9 по каналу связи 8. В случае превышения временных затрат t∑ на принятие решения некоторого порогового значения необходимого на свертывание и покидание позиционного района артиллерии противника 1, командиром 5 определяется наиболее вероятный маршрут движения 3 колонны артиллерии 1 и координаты возможного пункта назначения . В этом случае по команде командира 5 вооружение оператора 9 наносит огневой удар по движущейся колонне артиллерии 1 или по координатам с учетом средней скорости их перемещения. При наличии в распоряжении командира 5 беспилотного летательного аппарата видовой разведки 6 последний направляется по каналу связи 7 в район (X,Y)kij или для уточнения местоположения артиллерийских средств противника 1 и определения эффективности (наведения) огневых средств 9. Более подробно предложенный способ рассмотрен (см. фиг. 2, 3). На подготовительном этапе на пульте управления командира определяют границы района сбора информации, отображают линию соприкосновения войск с использованием электронных карт геоинформационной системы (ГИС) «Панорама» (см. Обзор отечественных ГИС военного назначения. Электронный ресурс: www.gistechnik.ru: Геоинформационные системы военного назначения (теория и практика применения): сборник тезисов докладов Республиканской научно-методической конференции 24 апреля 2014 года. - Минск: БГУ, 2014. - 65 с.) и цифровых моделей местности (ЦММ). Отображению подлежат тактические и инженерные свойства местности, сезонные климатические условия, тактико-технические характеристики средств перемещения (см. фиг. 4-6), используемые в районе сбора информации, и другая необходимая для анализа информация. В качестве последней могут выступать сведения о разрушенных мостах и виадуках, непроходимые разрушения в городской черте и др.
Основой для ЦММ является электронные карты, ГИС, аэрофотосъемки участков местности, военно-географическое описание местности, данные, позволяющие прогнозировать маршруты движения и районы размещения подразделений артиллерии противника, возможные разрушения и затопления, проходимость местности и др.
В результате ЦММ позволяет заблаговременно:
оценить в заданном районе проходимость, маскировочные свойства, возможности инженерного оборудования, защитные свойства и др.;
получить обобщенную оценку различных участков по совокупности их тактических свойств;
выделить в пределах района сбора информации (РСИ) участки местности, наиболее вероятные с точки зрения размещения в их пределах артиллерии противника различных классов.
Получить точную интегральную оценку свойств местности по всему заданному району и по всем классам артиллерии невозможно. Поэтому на подготовительном этапе РСИ делят на элементарные участки (ЭУ) и по каждому из них проводят оценку тактических свойств местности (ТСМ). При этом различают оценку проходимости различных классов артиллерии (самоходной колесной или гусеничной, буксируемой и т.д.) на местности и пригодность ЭУ для развертывания.
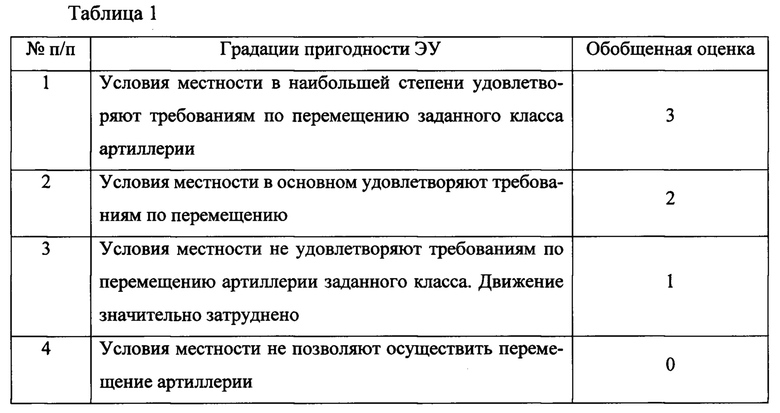
При анализе проходимости артиллерии различных классов на местности учитывают: продольные и поперечные углы скатов относительно направления движения, плотность грунта, густоту леса (кустарника), мощность растительного покрова, глубину водной преграды с учетом плотности дна, интенсивность гололедных явлений, глубину снежного покрова, толщину льда (см. Военная топография. Под ред. А.С. Николаева. -М.: Военное издательство, 1977 г.). Каждому из учитываемых параметров местности соответствует частный коэффициент проходимости. По результатам оценки совокупности частных коэффициентов ТСМ каждому элементарному участку дают обобщенную оценку, характеризующую его пригодность для прохождения конкретного класса артиллерии.
Вариант градации пригодности ЭУ для прохождения конкретного i-го, i=1, 2, …, I, класса артиллерии и соответствующие ему оценки приведены в Таблице 1.
В результате получают ЦММ в пределах РСИ для каждого i-го класса артиллерии получают путем разбиения этого района на ЭУ определенного размера (см. фиг. 3) и вычисления для них обобщенной оценки ТСМ. Модель ТСМ для каждого класса артиллерии представляют в виде матрицы Ai размером  элементами которой являются обобщенные оценки ТСМ элементарных участков (см. фиг. 4). На основе полученных данных прокладывают возможные маршруты движения для всех I классов артиллерии.
элементами которой являются обобщенные оценки ТСМ элементарных участков (см. фиг. 4). На основе полученных данных прокладывают возможные маршруты движения для всех I классов артиллерии.
Далее переходят к оценке тактических свойств местности элементарных участков РСИ по инженерным признакам соответствию требованиям по размещению (взводов, батарей, дивизионов артиллерии различных классов) на местности. Определяют номера ЭУ ( , m), соответствующие заданной номенклатуре участков района (см. фиг. 7). Обобщенная оценка ТСМ Vi (, m) отражает пригодность ЭУ для разведывания на нем артиллерии i-го класса, i=1, 2, …, I; I - количество классов артиллерии, используемых противником в РСИ.
, m), соответствующие заданной номенклатуре участков района (см. фиг. 7). Обобщенная оценка ТСМ Vi (, m) отражает пригодность ЭУ для разведывания на нем артиллерии i-го класса, i=1, 2, …, I; I - количество классов артиллерии, используемых противником в РСИ.
Обобщенная оценка Ui (, m) ЭУ по размещению артиллерии i-го класса в ячейке (, m) складывается из набора частных оценок по:
условиям видимости - 
маскировочным свойствам - 
защитным свойствам - 
возможности инженерного оборудования - 
доступности объектов поражения -  (см. Полевой устав армии США. FM90-8. Часть 6 - Боевое обеспечение. Глава 3 - Подразделения огневой поддержки. - Вашингтон. Округ Колумбия. 1986. 29. VIII). Данный набор частных оценок может быть расширен.
(см. Полевой устав армии США. FM90-8. Часть 6 - Боевое обеспечение. Глава 3 - Подразделения огневой поддержки. - Вашингтон. Округ Колумбия. 1986. 29. VIII). Данный набор частных оценок может быть расширен.
На основании частных оценок ТСМ определяют обобщенную оценку ТСМ для каждого ЭУ в соответствии со следующим правилом:

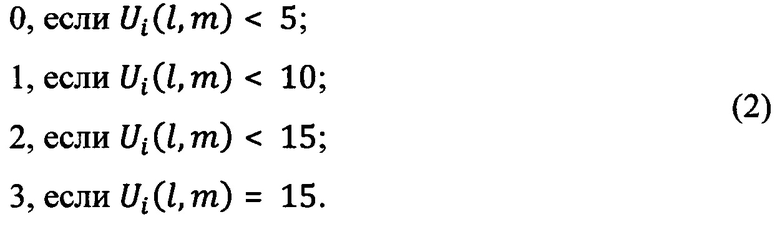
Значение Ui (, m) отражает степень пригодности ЭУ для развертывания артиллерии i-го класса. Результатом оценки местности является определение участков, удовлетворяющих требованиям по размещению различных подразделений артиллерии каждого из I классов на местности с учетом требований по необходимой площади для этого. Участки с низкой квалиметрической оценкой исключают из дальнейшего рассмотрения.
Элементарные участки, пригодные для развертывания i-го класса артиллерии и имеющие общие точки соприкосновения, объединяют в единые районы и определяют их общую площадь в соответствии с выражением

где S0 - площадь ЭУ; n - количество ЭУ, имеющих общие точки соприкосновения.
Значение  сравнивают с требуемой площадью позиционного района
сравнивают с требуемой площадью позиционного района  для развертывания подразделений различного j-го уровня (взвод, батарея, дивизион) для каждого i-го класса артиллерии (см. Н. Фомин. В помощь командиру батареи 105 мм буксируемых, 155-и 203,2 мм самоходных гаубиц США // Зарубежное военное обозрение, №2, 1986. с. 35-36).
для развертывания подразделений различного j-го уровня (взвод, батарея, дивизион) для каждого i-го класса артиллерии (см. Н. Фомин. В помощь командиру батареи 105 мм буксируемых, 155-и 203,2 мм самоходных гаубиц США // Зарубежное военное обозрение, №2, 1986. с. 35-36).
Аналогично модель ТСМ для каждого j-го подразделения, j=1, 2, … J, i-го класса артиллерии представляют в виде матрицы Aij размером элементами которой являются обобщенные оценки ТСМ элементарных участков (см. фиг. 7).
Полученные значения Aij запоминают по аналогии с Ai в виде соответствующих слоев (в количестве I×J) электронной карты района сбора информации. Названные выше операции требуют значительных временных затрат и могут быть выполнены на подготовительном этапе.
В процессе боевой работы с помощью средств разведки командира (РЛС КББ) обнаруживают и фиксируют момент выстрела (залпа) артиллерии противника t0. На основании нескольких измерений текущего положения снаряда пролонгируют и экстраполируют траекторию его полета с целью определения местоположения (X,Y)k огневых позиций противника (см. Голик A.M. Многоканальные радиолокационные станции разведки огневых позиций. Часть I, II. - М: МО, 1997. - 84 с., - 74 с.).
При разведке огневых позиций артиллерии противника поиск летящих снарядов (ракет) выполняют посредством дискретного сканирования луча фазированной антенной решетки РЛС по дискретному углу при постоянном значении его положения по углу места (см. фиг. 8). Угол места выбирают близким, либо равным углу укрытия к плоскости горизонта. Последний зависит от рельефа местности. Зондирующий сигнал РЛС представляет собой как правило радиоимпульс, фазокодоманипулированный в соответствии с 13-позиционным кодом Баркера. Излучают пакетами на этапах поиска и автозахвата. Из всех сформированных в данном угловом положении луча радиолокационных отметок от снаряда выбирают одну, обладающую наибольшей амплитудой, и осуществляют его автозахват.
Измерение текущих координат снаряда (ракеты) на этапе автозахвата осуществляют с помощью угловых дискриминаторов и дискриминатора дальности, функции которых обычно реализуют в алгоритмах программного обеспечения вычислительного устройства.
После автосопровождение объекта наблюдения (снаряда) выполняют сглаживание дискретных значений параметров его траектории методом наименьших квадратов, определяют класс орудия по баллистическим признакам. Далее находят прямоугольные координаты позиционного района (огневой позиции) и точки падения снаряда. Определение координат огневой позиции осуществляют путем радиолокационного сопровождения летящего снаряда по трем координатам на начальном участке траектории полета и ее экстраполяции к точкам вылета и падения. В предлагаемом способе по наблюдаемому с помощью РЛС восходящему участку траектории определяют ненаблюдаемый участок путем экстраполяции до уровня земли, например на основе кубической сплайн-интерполяции.
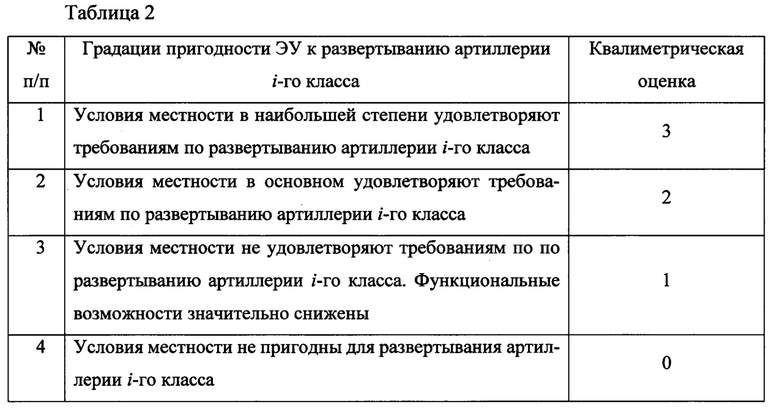
В основу экстраполяции траектории заложен приближенный способ решения задачи. Реальную траектории полета снаряда заменяют параболой с учетом баллистической функции Е. Экстраполяцию прямоугольных координат выполняют в соответствии с выражениями:


где Em - баллистическая функция, Em=с⋅П(Zm)G(V); с - баллистический коэффициент (выбирают постоянным для всех орудий); П(Zm) - функция плотности воздуха; G(V) - функция сопротивления воздуха; 

 - составляющие скорости снаряда на m-ом шаге экстраполяции; g - ускорение свободного падения; Δt - шаг экстраполяции.
- составляющие скорости снаряда на m-ом шаге экстраполяции; g - ускорение свободного падения; Δt - шаг экстраполяции.
По баллистическим параметрам траектории полета снаряда осуществляют определение его калибра, типа стреляющего орудия. Современные РЛС КББ работают в диапазонах 2-4, 4-8 и 9-12 ГГц, что позволяет обнаруживать огневые позиции минометов на удаленности до 30 км, артиллерии - до 50 км, а пусковых установок ракетных систем залпового огня - до 80 км (см. РЛС контрбатарейной борьбы зарубежных стран. Электронный ресурс http://www.modernarmy.ru/article/126). На фиг. 9 приведены характеристики нескольких РЛС КББ. В условиях близких к одновременному (менее 5 секунд) обнаружению в полете нескольких снарядов с общей траекторией принимают решение о участии в огневом воздействии артиллерийского подразделения противника j-й штатной структуры i-го класса. Приведенное временное ограничение необходимо для правильной классификации артиллерийского залпа и исключения из рассмотрения псевдозалпа (см. В. Русаков. Возможности, преимущества и недостатки псевдозалпа артиллерийского орудия // Зарубежное военное обозрение. - 2013. - №8. - с. 56-59).
На основе полученных данных определяют необходимую площадь Sij для развертывания артиллерийского подразделения j-й структуры i-го класса.
С помощью слоя Aij электронной карты уточняют вычисленные координаты (X,Y)k с учетом их пригодности по тактическим и инженерным свойствам местности для развертывания k(ij)-го подразделения артиллерии противника (см. фиг. 10а, б). В случае несоответствия названным требованиям координаты (X,Y)kij переносят в ближайший пригодный для этого участок местности с координатами . При этом учитывают доступность этого участка местности для транспортных средств i-го класса артиллерии по слою Ai электронной карты района сбора информации, удаление от линии соприкосновения войск (см. Савкин С.А., Рынгач В.Г., Игнаточкин A.M. Организация, вооружение и тактика действий частей и подразделений иностранных армий. Учебное пособие. - Тольятти: ТГУ, 2008. Электронный ресурс http://studfiles.net/preview).
На следующем этапе командир принимает решение о целесообразности ответного удара по k(ij)-му артиллерийскому подразделению противника, назначает необходимое для этого количество артиллерийских орудий и снарядов вооружения оператора. С этой целью определяет необходимые временные затраты на цикл управления и огневое воздействие t∑:

где toбp - время сбора и обработки данных о местоположении, типе, количестве огневых средств k(ij)-го подразделения артиллерии противника, необходимых размерах позиционного района, tпр.реш - временные затраты на принятие решения о поражении k(ij)-той цели, определение количества привлекаемых на это орудий и снарядов вооружения оператора, необходимой ориентации привлекаемой артиллерии в горизонтальной θk и вертикальной βk областях, типа используемых снарядов, tпpд - время доведения решения командира до исполнителей, tвозд - длительность подготовки и нанесения огневого удара. В качестве дополнительных временных затрат можно отметить время полета снаряда до момента его обнаружения РЛС КББ (см. фиг. 12).
Далее определяют временные затраты  на свертывание k(ij)-го артиллерийского подразделения противника и покидание позиционного района (см. фиг. 11). Эти временные затраты априорно известны и определены руководящими документами (см. Боевой устав артиллерии. Часть 2. Дивизион, батарея, взвод, отделение (расчет). Электронный ресурс: http://pfhdia/text/78/217/28918php).
на свертывание k(ij)-го артиллерийского подразделения противника и покидание позиционного района (см. фиг. 11). Эти временные затраты априорно известны и определены руководящими документами (см. Боевой устав артиллерии. Часть 2. Дивизион, батарея, взвод, отделение (расчет). Электронный ресурс: http://pfhdia/text/78/217/28918php).
При выполнении неравенства артиллерия противника не успевает покинуть позиционный район. По команде командира, передаваемой с пульта управления, огневыми средствами оператора наносят артиллерийский удар по позиционному району k(ij)-й цели с координатами  .
.
В противном случае, когда (артиллерия противника успевает покинуть позиционный район) с помощью средств разведки командира выполняют дополнительный анализ с использованием Ai-го слоя электронной карты (см. фиг. 10б). В этом случае выявляют возможные маршруты движения колонны артиллерии i-го класса. В условиях пересеченной местности число последних ограничено. Априорно зная среднюю скорость движения колонны артиллерии i-го класса, время начала движения  можно примерно определить ее текущие координаты, по которым и наносят удар. Для определения точных координат движущейся k(ij)-й цели целесообразно задействовать дежурный, беспилотный летательный аппарат визуальной разведки, находящийся в воздухе. Последний направляют с пульта управления командира в предполагаемый район движения колонны артиллерии. После обнаружения и уточнения координат k(ij)-й цели по ней наносят огневой удар и уточняют его результаты.
можно примерно определить ее текущие координаты, по которым и наносят удар. Для определения точных координат движущейся k(ij)-й цели целесообразно задействовать дежурный, беспилотный летательный аппарат визуальной разведки, находящийся в воздухе. Последний направляют с пульта управления командира в предполагаемый район движения колонны артиллерии. После обнаружения и уточнения координат k(ij)-й цели по ней наносят огневой удар и уточняют его результаты.
Реализация способа трудностей не вызывает. В качестве средства разведки командира может быть использована РЛС КББ 1Л271 «Аистенок» компании ОАО НПО «Стрела» (входит в состав концерна ВКО «Алмаз-Антей»). Кроме того, с этой целью может быть использована пассивная РЛС акустической разведки в соответствии с Пат. РФ №2624483. Достоинство этой РЛС состоит в скрытности измерения координат артиллерии противника. Для обработки информации целесообразно использовать цифровые карты района сбора информации ГИС «Панорама».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания ретранслированных помех | 2018 |
|
RU2696002C1 |
| СПОСОБ СТРЕЛЬБЫ РЕАКТИВНЫМИ СНАРЯДАМИ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ В УСЛОВИЯХ КОНТРБАТАРЕЙНОЙ БОРЬБЫ | 2014 |
|
RU2602162C2 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2017 |
|
RU2664529C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы | 2023 |
|
RU2825760C1 |
| СПОСОБ ВОЗДУШНОЙ РАЗВЕДКИ НАЗЕМНЫХ (НАДВОДНЫХ) ОБЪЕКТОВ С ЦЕЛЬЮ ТОПОГЕОДЕЗИЧЕСКОГО, МЕТЕОРОЛОГИЧЕСКОГО И ДРУГИХ ВИДОВ ОБЕСПЕЧЕНИЯ ПУСКОВ (СБРОСОВ) УПРАВЛЯЕМЫХ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННЫХ ГОЛОВОК САМОНАВЕДЕНИЯ | 2020 |
|
RU2771965C1 |
| Способ выполнения огневых задач с использованием БПЛА в условиях РЭБ и при отсутствии спутниковой навигации | 2024 |
|
RU2828601C1 |
| Способ пристрелки цели с использованием специального реактивного снаряда | 2019 |
|
RU2715466C1 |
| СПОСОБ УПРАВЛЕНИЯ КОМПЛЕКСАМИ ВООРУЖЕНИЯ ФОРМИРОВАНИЙ АРТИЛЛЕРИИ ПРИ СТРЕЛЬБЕ | 2013 |
|
RU2539707C1 |
| Комплексный тактический тренажер подготовки экипажа и подразделения | 2022 |
|
RU2809960C1 |




Изобретение относится к области активной и пассивной локации и может быть использовано для высокоточного определения текущих координат артиллерии противника в интересах эффективной контрбатарейной борьбы. Учитывают тактические и инженерные свойства местности. Сравнивают временные затраты на цикл анализа и управления огнем артиллерии контрбатарейной борьбы и временные затраты на сворачивание и покидание позиционного района артиллерией противника. Комбинируют средства мониторинга с использованием беспилотного летательного аппарата видовой разведки. Для сокращения временных затрат на подготовительном этапе выполняют анализ пригодности элементарных участков местности района сбора информации на проходимость различных классов артиллерии и возможность развертывания артиллерийских подразделений различного уровня. Повышается точность определения текущих координат артиллерии противника. 2 з.п. ф-лы, 9 ил., 7 табл.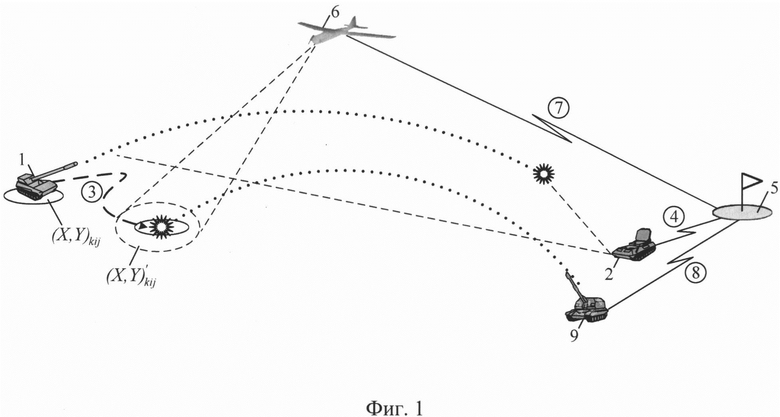
1. Способ борьбы с артиллерией противника, включающий фиксирование координат средств разведки командира и вооружения оператора, обнаружение на ранней стадии полета и выполнение нескольких измерений текущего положения снаряда с целью расчета траектории его полета, введение координат цели в пульт управления командира, назначение цели для поражения, расчет на пульте управления командира азимута θk, дальности dk и угла места βк до цели относительно местоположения вооружения оператора, передачу оператору вооружения команды на нацеливание (θk, dk, βk) и координат цели (X, Y)k, k=1, 2, …, K, отличающийся тем, что дополнительно на подготовительном этапе на пульте управления командира определяют границы района сбора информации на цифровой карте геоинформационной системы, делят район сбора информации на элементарные участки, оценивают проходимость элементарных участков района сбора информации и их пригодность для развертывания артиллерии I различных классов по тактическим свойствам местности и инженерным признакам, определяют элементарные участки района сбора информации, в которых возможно перемещение определенного i-го класса артиллерии, i=1, 2, ..., I, исключают из анализа непроходимые элементарные участки района сбора информации, на основе результатов выполненного анализа формируют и запоминают для каждого i-го класса артиллерии, i=1, 2, …, I соответствующий слой Ai электронной карты района сбора информации, анализируют элементарные участки района сбора информации на возможность развертывания артиллерии различных классов, по совокупности пригодных взаимноприлегающих участков района сбора информации определяют их пригодность для использования в качестве позиционных районов артиллерийских подразделений для каждого j-го уровня, j=1, 2, …, J, каждого i-го класса артиллерии, i=1, 2, … I, на основе результатов выполненного анализа формируют и запоминают соответствующий слой Aij электронной карты района сбора информации для каждого j-го подразделения: отделение, взвод, батарея, дивизион и каждого i-го класса артиллерии, а в процессе боевой работы фиксируют время обнаружения полета снаряда t0, экстраполируют траекторию полета снаряда с целью определения местоположения артиллерийских средств противника (X, Y)ki, калибра снаряда и класса стреляющего орудия, а в условиях, близких к одновременному обнаружению в полете нескольких снарядов с общей траекторией, принимают решение об участии в огневом воздействии j-го артиллерийского подразделения противника, определяют необходимую площадь Sijтр для развертывания обнаруженного артиллерийского подразделения противника, на основе слоя Аij электронной карты уточняют вычисленные координаты(Х, Y)'kij местоположения артиллерии противника с учетом пригодности площади позиционного района, его доступности и возможности для развертывания j-го подразделения i-го класса артиллерии, определяют необходимое количество артиллерийских орудий и снарядов вооружения оператора для поражения j-го артиллерийского подразделения противника, определяют необходимые временные затраты на цикл управления и огневого воздействия:
tΣ=tорб+tпр.реш+tпрд+tвозд,
где topб - время сбора и обработки данных о местоположении, типе, количестве огневых средств противника, необходимых размерах позиционного района Sijтр, tnp.реш - временные затраты на принятие решения о поражении k(ij)-й цели, определение количества привлекаемых на это орудий и снарядов вооружения оператора, определение необходимой ориентации привлекаемой артиллерии в горизонтальной θk и вертикальной βk областях, тип используемых снарядов, tпрд - время доведения решения командира до исполнителей, tвозд - длительность подготовки и нанесения огневого удара, определяют временные затраты на свертывание артиллерийского подразделения противника и покидание позиционного района tсвk(ij), сравнивают знания временных затрат tΣ и tсвk[ij), при выполнении неравенства tΣ<tсвk(ij) наносят огневой удар по позиционному району артиллерии противника с координатами (X, Y)'kij, в противном случае, когда tΣ>t свk(ij) на основе соответствующего Аi-го слоя электронной карты района сбора информации определяют возможные направления и скорость перемещения k(ij)-го подразделения артиллерии противника, вычисляют возможные текущие координаты k(ij)-го подразделения артиллерии противника, по которым наносят огневой удар.
2. Способ по п. 1, отличающийся тем, что в качестве средства разведки командира используют радиолокационную станцию контрбатарейной борьбы.
3. Способ по п. 1, отличающийся тем, что в качестве средства разведки командира используют пассивный акустический локатор.
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2239766C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АРТИЛЛЕРИИ ПРОТИВНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (РЕАЛИЗАЦИИ) | 2015 |
|
RU2624483C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2466423C2 |
| СПОСОБ УПРАВЛЕНИЯ КОМПЛЕКСАМИ ВООРУЖЕНИЯ ФОРМИРОВАНИЙ АРТИЛЛЕРИИ ПРИ СТРЕЛЬБЕ | 2013 |
|
RU2539707C1 |
| СПОСОБ СОЗДАНИЯ ТОПОГЕОДЕЗИЧЕСКИХ СЕТЕЙ ДЛЯ ПОДГОТОВКИ БОЕВЫХ ДЕЙСТВИЙ РАКЕТНЫХ ВОЙСК, АРТИЛЛЕРИИ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2581109C9 |

