Изобретение относится к области радиолокации и может быть использовано для дополнительного отсева ложной трассовой радиолокационной информации, полученной по результатам измерения текущих координат объекта на траектории.
В процессе работы радиолокационных станций разведки огневых позиций противника (РЛС РОП) осуществляется автосопровождение (АС) объекта на траектории его полета. По полученным текущим координатам определяются координаты точки вылета - координаты огневой позиции (ОП). Однако данные траекторных измерений, поступающие в систему вторичной обработки информации, могут принадлежать как к целям, являющимися объектами разведки РЛС РОП: артиллерийские снаряды, мины, снаряды реактивных систем залпового огня (РСЗО), тактические ракеты, так и к целям, не являющимися объектами разведки для РЛС РОП: местные предметы, самолеты, вертолеты, беспилотные летательные аппараты (БПЛА), крылатые ракеты.
Если сопровожденный объект относится к целям, являющимися объектами разведки для РЛС РОП, после соответствующей обработки координаты его точки выстрела (пуска) определяются с достаточной точностью. Если же сопровожденный объект относится к целям, не являющимися объектами разведки для РЛС РОП, обработка в устройстве вторичной обработки РЛС координат его полета по законам внешней баллистики даст не допустимую ошибку разведки. Такой результат искажает достоверность разведывательной информации и уменьшает пропускную способность РЛС РОП. Поэтому вопросы распознавания и отсева ложных целей являются весьма актуальными.
Проработке вопроса распознавания ложных целей посвящено множество печатных работ [10-12] и патентов. Известен способ автоматического обнаружения и сопровождения целей [3] (патент №2264633, приоритет 08.01.2004 г. ), включающий в себя проверку истинности цели по статистическим критериям и сброс с автосопровождения ложной цели. Таким критерием является измеренная скорость полета объекта наблюдения. На ее основе формируется пороговое значение скорости. После чего все обнаруженные цели подразделяют на две группы по критерию превышения или не превышения порогового значения скорости. Однако этот критерий не может обеспечить распознавание объектов, обладающих скоростью полета более 70 м/с (252 км/час), что соответствует полетной скорости, которую имеют как большинство самолетов, вертолетов и крылатых ракет, не являющимися объектами разведки для РЛС РОП, так и артиллерийских снарядов на средних и больших зарядах и снарядов реактивных систем залпового огня, тактических ракет, которые являются объектами разведки для РЛС РОП.
Известен способ распознавания объектов по совокупности признаков (патент №2412451, приоритет 21.07.2009 г.). Достигаемый технический результат данного изобретения - повышение достоверности разделения воздушных объектов на классы за счет расширения совокупности признаков распознавания, которое достигается на основе введения следующих признаков распознавания: скорости полета, эффективной поверхности рассеивания (ЭПР), высоты полета объекта наблюдения на траектории. Однако перечисленные признаки так же не дают возможности однозначно идентифицировать сопровожденные объекты как цели, подлежащие или не подлежащие обработке для РЛС РОП.
Известны ряд способов и устройств [2-5] обработки траекторией информации для распознавания маневра летательных аппаратов (ЛА) на траектории, состоящих в том, что все сигналы, отраженные от движущихся воздушных объектов, преобразуются в приемном устройстве усиления и преобразования принимаемых сигналов РЛС из аналоговой формы в цифровую, получая тем самым измеренные текущие координаты объекта на траектории. Полученные измеренные координаты подвергаются траекторной обработке (запоминание, сглаживание, экстраполяция) в устройстве вторичной обработки. На основе траекторной обработки полученных измерений объекта наблюдения выявляется (обнаруживается) факт возникновения возмущения параметров (одного или нескольких). К таким параметрам могут относиться: курсовой угол ЛА, который до выполнения маневра совершал прямолинейный полет, отклонение траектории ЛА от прямолинейной по каждой из фильтруемых координат, изменение скорости полета ЛА, вычисляемых в процессе сопровождения ЛА. Изменение перечисленных параметров (одного или нескольких) является признаком для распознавания наличия маневра наблюдаемого объекта на траектории его полета, но они не могут быть признаками цели, не являющейся объектом разведки для РЛС РОП, поскольку тактические ракеты, являющиеся целями для РЛС РОП, так же могут совершать маневры на траектории полета.
Наиболее близкими к заявляемому устройству распознавания целей, не являющихся объектами разведки, принятому за прототип, является устройство распознавания стреляющих систем (патент №2231084, приоритет 14.08.2001 г.). Блок-схема устройства распознавания стреляющих систем, выбранного за прототип, приведена на фиг. 1 и описывает последовательность решения отдельных задач [1] при распознавании классов стреляющих систем.
На фиг. 1:
1 - блок сглаживания;
2 - блок преобразования сглаженных координат;
3 - первое пороговое устройство;
4 - блок памяти условных плотностей вероятности;
5 - блок определения максимума условной плотности вероятности;
6 - второе пороговое устройство;
7 - запоминающее устройство;
8 - устройство сравнения;
9 - блок анализа возрастания значений доплеровской частоты;
10 - третье пороговое устройство.
Устройство, принятое за прототип, работает следующим образом.
В процессе автосопровождения текущие прямоугольные координаты траектории полета объекта х, у, h и значения доплеровской частоты сигнала поступают на вход запоминающего устройства 7. Значения доплеровской частоты сигнала с первого выхода запоминающего устройства 7 передаются на второй вход блока анализа возрастания значений доплеровской частоты 9, а прямоугольные координаты траектории полета снаряда со второго выхода запоминающего устройства 7 передаются на вход блока сглаживания 1. В результате сглаживания в устройстве вторичной обработки прямоугольных координат х, у, h методом наименьших квадратов [12] второго порядка получаются оценки прямоугольных координат, скоростей и ускорений снаряда для конца интервала наблюдения, которые далее пересчитываются в блоке преобразования сглаженных координат 2 для середины интервала наблюдения (Хср, Уср, Hcp, Vxcp, Vycp, Vнcp, Wxcp, Wycp, Wнcp), рассчитываются горизонтальные составляющие скорости (Vг) и ускорения (Wг), траекторные скорость (Vcp), ускорение (Wcp) и баллистическая функция (Еср) для середины интервала наблюдения [1]:
Полученные параметры являются параметрами для предварительного распознавания класса сопровожденного объекта.
Определение характера участка траектории - активный или пассивный - осуществляется по знаку баллистической функции Еср в первом пороговом устройстве 3.
Если Еср≥0 - объект находится на пассивном участке траектории и управление передается на блок 4 (блок памяти условных плотностей вероятности), где по величинам горизонтальных скоростей и ускорений определяются значения плотности вероятности для каждого из четырех классов:
1 класс - гаубицы;
2 класс - минометы;
3 класс - РСЗО;
4 класс - тактические ракеты (пассивный участок).
Далее в блоке определения максимума условной плотности вероятности 5 осуществляется отнесение объекта к тому или иному классу по максимуму условной плотности вероятности принадлежности наблюдаемой баллистической цели (к одному из четырех классов).
Если Еср<0 - объект находится на активном участке траектории и управление передается на второе пороговое устройство 6, где по предварительно выбранному порогу баллистической функции производится отнесение цели к 5 или 6 классам: 5 класс - тактические ракеты (активный участок), 6 класс - активно-реактивные снаряды (АРС), активно-реактивные мины (АРМ).
После чего производится дополнительное распознавание на принадлежность цели к 1 или 3 классу в устройстве сравнения 8. Если цель относится к 2, 4, 5 или 6 классу, распознавание класса цели считается выполненным. Если цель относится к 1 или 3 классу - анализируется наличие возрастания значений доплеровских частот, поступивших на второй вход блока анализа возрастания значений доплеровской частоты 9 с первого выхода запоминающего устройства 7.
Если значения доплеровской частоты возрастают, цель принадлежит к 3 классу и распознавание класса цели считается выполненным, в противном случае управление передается на третье пороговое устройство 10, где производится сравнение скорости снаряда в средней точке участка наблюдения Vcp с пороговым значением Vпорог.
Если Vcp<Vпорог - цель принадлежит к 1 классу и распознавание класса цели считается выполненным, в противном случае (Vcp≥Vпорог) - распознавание цели считается выполненным, класс цели не изменяется и остается равным полученному на этапе предварительного распознавания.
Пороговое значение скорости Vпорог определяется с помощью математического моделирования и по результатам экспериментальных испытаний (стрельб) с учетом тактики ведения боевых действий (взаимного расположения огневых позиций и РЛС, способа ведения огня и т.д.).
К недостаткам рассматриваемого устройства относится следующее.
При работе рассматриваемого устройства распознавания классов стреляющих систем априори предполагается, что объект относится к цели, являющейся объектом разведки для РЛС РОП. В данном устройстве не рассматривалась возможность, что на АС могут попасть цели, не являющиеся объектами разведки для РЛС РОП. Таким образом, полученные с АС координаты от любых целей обрабатываются по законам внешней баллистики как координаты соответствующие цели, являющейся объектом разведки для РЛС РОП. Полученные в результате обработки таких данных координаты стреляющих систем снижают точность и достоверность разведки и уменьшают пропускную способность РЛС РОП.
Целью настоящего изобретения и техническим результатом является возможность снятия с обработки траекторий от целей, не являющихся объектами разведки РЛС РОП, до выполнения операций по распознаванию класса цели и определения координат ОП, что существенно повышает достоверность разведывательной информации и сокращает время траекторной обработки (увеличивает пропускную способность РЛС РОП).
Поставленная цель данного изобретения достигается тем, что в заявленном устройстве для распознавания целей, не являющихся объектами разведки, наряду с параметрами, полученными для распознавания класса цели в прототипе, введены дополнительные признаки распознавания, указывающие на принадлежность объекта наблюдения к целям, не относящимся к объектами разведки РЛС РОП. Такими признаками являются: баллистический коэффициент (С), полное ускорение объекта в средней точке участка наблюдения (Wcp), вертикальная составляющая скорости объекта (Vнcp), вертикальная составляющая ускорения объекта наблюдения на траектории (Wнср), скорость выстреливания (начальная скорость объекта при выстреле) (V0), угол выстреливания (Θ0), время экстраполяции в точку вылета (tэ), среднеквадратическая ошибка определения дальности при сопровождении объекта на траектории (σд), а так же их соотношения.
Возможность выполнения поставленной цели объясняется тем, что ряд характеристик (признаков распознавания) для целей, которые являются объектами разведки РЛС РОП, отличаются от тех же характеристик для целей, не являющихся объектами разведки РЛС РОП.
Более подробно сущность изобретения состоит в следующем.
В предлагаемом устройстве распознавания целей, не являющихся объектами разведки, для распознавания используются параметры, получаемые в устройстве-прототипе (блок сглаживания 1 и блок преобразования сглаженных координат 2:
 признак возрастания доплеровской частоты по модулю (Возр F);
признак возрастания доплеровской частоты по модулю (Возр F);
оценки траекторных параметров, полученных при сопровождении объекта на траектории, определяемые при вторичной обработке траекторных измерений координат (Vcp, Wcp, Хср, Уср, Hcp, Vxcp, Vycp, Vнcp, Wнcp) в средней точке участка наблюдения;
значение баллистической функции в средней точке участка наблюдения - Еср;
Кроме того дополнительно рассматриваются следующие параметры распознавания:
отношение значений траекторных ускорения к скорости исследуемого объекта в средней точке участка наблюдения - Wcp / Vcp;
отношение значений баллистической функции к траекторной скорости - Еср/Vcp в средней точке участка наблюдения;
баллистический коэффициент С;
среднеквадратическая ошибка определения дальности при сопровождении объекта на траектории σд, определяемая в устройстве вторичной обработки по разнице между сглаженными и измеренными координатами участка наблюдения:
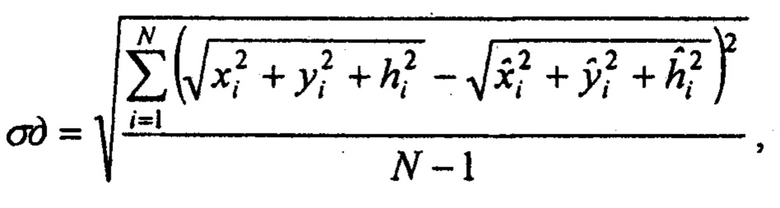
где xi, yi, hi - текущие (измеренные) прямоугольные координаты траектории полета  объекта, поступающие на вход запоминающего устройства 7 в процессе автосопровождения, - оценки прямоугольных координат траектории полета объекта, полученные в блоке сглаживания 1, N - количество точек на участке сопровождения;
объекта, поступающие на вход запоминающего устройства 7 в процессе автосопровождения, - оценки прямоугольных координат траектории полета объекта, полученные в блоке сглаживания 1, N - количество точек на участке сопровождения;
начальные условия стрельбы: угол выстреливания и скорость выстреливания (Θ0, V0), время экстраполяции в точку вылета - tэ, определяемые путем решения упрощенных дифференциальных уравнений в устройстве вторичной обработки.
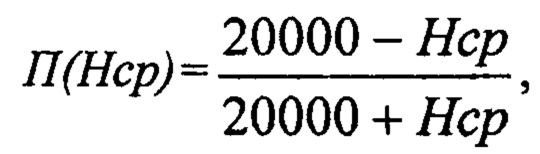
По предварительно определенному в (1) значению баллистической функции в средней точке участка наблюдения - Еср: определяется баллистический коэффициент С:

где П(Нср) - функция плотности воздуха, изменяющаяся с высотой полета снаряда:
G(Vcp) - функция сопротивления воздуха:
G(Vcp)=0,000474⋅Vcp⋅Cx(Vcp),
Cx(Vcp) - функция лобового сопротивления.
Функция лобового сопротивления в зависимости от скорости полета снаряда на траектории определяется по эмпирическим зависимостям:

Постоянство баллистического коэффициента С для любого воздушного объекта обеспечивает возможность вычисления баллистической функции Е (Ei=C⋅П(Hi)⋅G(Vi)), на каждом i-том шаге решения задачи экстраполяции в зависимости от текущей скорости Vi полета объекта:

где Vx, Vy, Vн - скорости по координатам X, У, Н, получаемые при экстраполяции траектории до точки вылета.
Выполнение задачи экстраполяции траектории до точки вылета ведется по приведенным ниже зависимостям последовательно на каждом шаге dt решения дифференциальных уравнений методом Эйлера:

ti+1=ti+dt, i=1, 2, …
при начальных условиях:
X1=Xcp, Y1=Уcp, H1=Hcp,  E1=Ecp,
E1=Ecp,
где dt - шаг решения, для режима работы станции по определению координат точки вылета снаряда можно принять dt=-1.
Вычисления производятся до тех пор, пока не выполнится неравенство: Hi≤0.
Для последней точки экстраполяции i=N определяется время экстраполяции tэ из текущего ti в формулах (4), скорость выстреливания V0 по зависимости (3) и угол выстреливания Θ0 по зависимости (5):

Далее распознавание радиолокационного объекта наблюдения осуществляется применением метода обработки, включающего в себя сравнение эталонных (пороговых) значений рассматриваемых параметров распознавания с параметрами, полученными в процессе обработки текущей радиолокационной информации. При этом в зависимости от выполнения или не выполнения условий сравнений с порогами применяется система установки весовых коэффициентов k.
Эталонные (пороговые - POR) значения были получены на основании статистической обработки расчетных траекторий для современных артиллерийских систем, а так же из записей реальных траекторий снарядов и траекторий целей, не являющихся объектами разведки РЛС РОП, полученных при испытаниях РЛС.
Значения порогов для соответствующих параметров распознавания имеют следующие значения:
- для баллистического коэффициента С: POR_C1=5, POR_C2=0,1;
- для ускорения в средней точке интервала наблюдения Wcp: POR_W1=5, POR_W2=0,1;
- для баллистической функции Еср: POR_E1=90, POR_E2=0;
- для скорости по координате H в средней точке интервала наблюдения Vнср: POR_VH=0;
- для ускорения по координате H в средней точке интервала наблюдения Wнcp: POR_WH=0;
- для признака возрастания доплеровской частоты (Возр F): POR_F1=5, POR_F2=2;
- для скорости в средней точке интервала наблюдения Vcp: POR_V1=300, POR_V2=70;
- для угла выстреливания Θ0: POR_Θ1-17°, POR_Θ02=110°, POR_Θ03=0°;
- для времени экстраполяции в точку вылета tэ: POR_TE=10;
- для среднеквадратической ошибки определения дальности при сопровождении объекта на траектории σд: POR_σ=30.
А так же значения порогов:
- для отношения значений траекторных ускорения к скорости исследуемого объекта в средней точке участка наблюдения - Wcp/Vcp: POR_WV1=0,1, POR_WV2=0,01;
- для отношения значений баллистической функции к скорости в средней точке участка наблюдения - Еср/Vcp: POR_EV1=3, POR_EV2=0,1.
Для отсеивания ложных целей вводятся весовые коэффициенты, которые предварительно обнуляются.
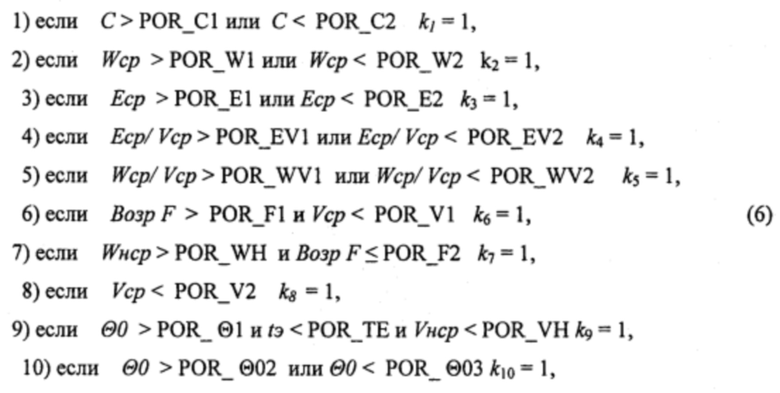
По результатам каждого j-го сравнения с порогами каждого из Nnp параметров распознавания устанавливаются соответствующие значения весовых коэффициентов по j-му параметру распознавания (если результаты сравнения выполняются - kj=1, в противном случае остается равным kj=0, где j=1… Nnp, Nnp=11 - число параметров распознавания):
1) если С>POR_C1 или С<POR_C2 - значение весового коэффициента k1=1,
2) если Wcp>POR_W1 м/с2 или Wcp<POR_W2 м/с2 - значение весового коэффициента k2=1,
3) если Еср>POR_E1 или Еср<POR_E2 - значение весового коэффициента k3=1,
4) если Еср/Vcp>POR_EV1 или Еср/Vcp<POR_EV2 - значение весового коэффициента k4=1,
5) если Wcp/Vcp>POR_WV1 или Wcp/Vcp<POR_WV2 - значение весового коэффициента k5=1,
6) если Возр F>POR_F1 и Vcp<POR_V1 м/с - значение весового коэффициента k6=1,
7) если Wнcp>POR_WH м/с2 и Возр F≤POR_F2 - значение весового коэффициента k7=1,
8) если Vcp<POR_V2 м/с - значение весового коэффициента k8=1,
9) если Θ0>POR_Θ1 и tэ<POR_TEc и Vнcp<POR_VH - значение весового коэффициента k9=1,
10) если Θ0>POR_Θ02 или Θ0<POR_Θ03 - значение весового коэффициента k10=1,
11) если σд>POR_σм - значение весового коэффициента k11=1.
Все полученные весовые коэффициенты суммируются:
Если полученная сумма будет равна или меньше двух (Ксум≤2), принимается решение, что данный объект, траектория которого исследовалась, относится к цели РЛС РОП и дальнейшая обработка его координат производится согласно прототипу.
Если полученная сумма будет больше двух (Ксум>2), принимается решение, что данный объект, траектория которого исследовалась, относится к цели, не являющейся объектом разведки РЛС РОП, и дальнейшая обработка его координат прекращается.
На этом работа заявляемого устройства распознавания целей, не являющихся объектами разведки, завершается.
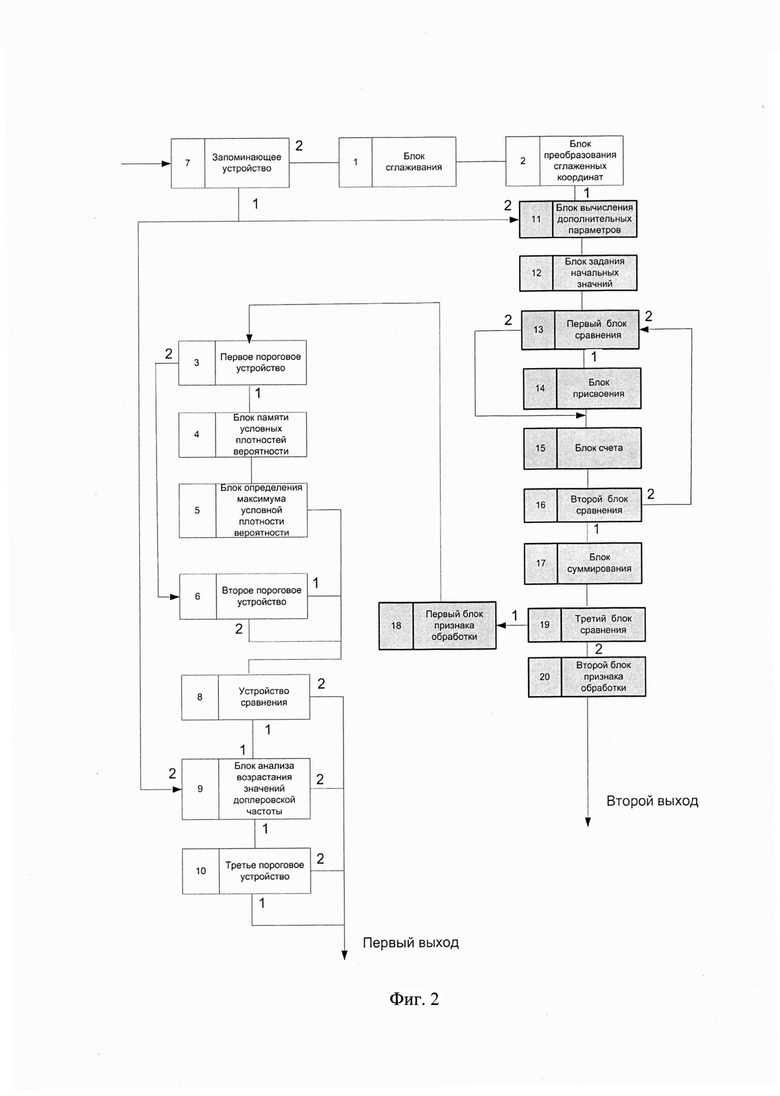
На фиг. 2 представлена блок-схема заявляемого устройства распознавания целей, не являющихся объектами разведки, где:
1 - блок сглаживания;
2 - блок преобразования сглаженных координат;
3 - первое пороговое устройство;
4 - блок памяти условных плотностей вероятности;
5 - блок определения максимума условной плотности вероятности;
6 - второе пороговое устройство;
7 - запоминающее устройство;
8 - устройство сравнения;
9 - блок анализа возрастания значений доплеровской частоты;
10 - третье пороговое устройство
11 - блок вычисления дополнительных параметров;
12 - блок задания начальных значений;
13 - первый блок сравнения;
14 - блок присвоения;
15 - блок счета;
16 - второй блок сравнения;
17 - блок суммирования;
18 - первый блок признака обработки;
19 - третий блок сравнения;
20 - второй блок признака обработки;
Заявляемое устройство распознавания целей, не являющихся объектами разведки, содержит последовательно соединенные запоминающее устройство 7, блок сглаживания 1, блок преобразования сглаженных координат 2, а также последовательно соединенные первое пороговое устройство 3, блок памяти условных плотностей вероятностей 4, блок определения максимума условной плотности вероятности 5, а также второе пороговое устройство 6, вход которого подключен к второму выходу первого порогового устройства 3, а первый и второй выходы второго порогового устройства 6 и выход блока определения максимума условной плотности вероятности 5 объединены между собой и подключены к входу последовательно соединенных устройства сравнения 8, блока анализа возрастания значений доплеровской частоты 9 и третьего порогового устройства 10, при этом первый выход запоминающего устройства 7 соединен со вторым входом блока анализа возрастания значений доплеровской частоты 9, а второй его выход подключен к входу блока сглаживания 1, вход устройства сравнения 8 соединен с объединенными выходами блока определения максимума условной плотности вероятности 5 и второго порогового устройства 6, а первый выход устройства сравнения 8 подключен к первому входу блока анализа возрастания значений доплеровской частоты 9, первый выход которого подсоединен к входу третьего порогового устройства 10, при этом второй выход устройства сравнения 8 объединен со вторым выходом блока анализа возрастания значений доплеровской частоты 9, первым и вторым выходами третьего порогового устройства 10 и является первым выходом устройства распознавания целей, не являющихся объектами разведки, отличающееся тем, что с целью распознавания целей, не являющихся объектами разведки, между выходом блока преобразования сглаженных координат 2 и входом первого порогового устройства 3 введены последовательно соединенные блок вычисления дополнительных параметров 11, блок задания начальных значений 12, первый блок сравнения 13, блок присвоения 14, блок счета 15, второй блок сравнения 16, блок суммирования 17, третий блок сравнения 19, первый блок признака обработки 18, выход которого подключен к входу первого порогового устройства 3, при этом второй вход блока вычисления дополнительных параметров 11 подключен к первому выходу запоминающего устройства 7, второй выход первого блока сравнения 13 подключен к выходу блока присвоения 14, а второй выход второго блока сравнения 16 подключен ко второму входу первого блока сравнения 13, третий блок сравнения 19 своим вторым выходом подключен к входу второго блока признака обработки 20 выход которого является вторым выходом заявляемого устройства распознавания целей, не являющихся объектами разведки.
Заявляемое устройство распознавания целей, не являющихся объектами разведки, работает следующим образом.
В процессе автосопровождения объекта на траектории текущие прямоугольные координаты траектории полета объекта и значения доплеровской частоты сигнала поступают на вход запоминающего устройства 7, где запоминаются значения доплеровской частоты сигнала и с его первого выхода передаются на второй вход блока анализа возрастания значений доплеровской частоты 9 и на второй вход блока вычисления дополнительных параметров 11. Прямоугольные координаты траектории полета объекта со второго выхода запоминающего устройства 7 передаются на вход блока сглаживания 1, где они сглаживаются. В результате получаются сглаженные оценки прямоугольных координат, скоростей и ускорений объекта наблюдения в конце интервала наблюдения. В блоке преобразования сглаженных координат 2 осуществляется пересчет прямоугольных координат траектории полета объекта, скоростей и ускорений в середину интервала наблюдения (Xcp, Vcp, Hcp Vxcp, Vycp, Vнcp Vcp, Wcp), а так же расчет горизонтальных составляющих скоростей и ускорений для середины интервала наблюдения (Vг и Wг) и) и баллистической функции Еср.
После этого подключается первый вход блока вычисления дополнительных параметров 11, где производятся вычисления дополнительных параметров распознавания.
Для этого анализируется признак возрастания доплеровской частоты BoзрF, значение которого поступает с первого выхода запоминающего устройства 7. Определяются отношение значений траекторных ускорения к скорости исследуемого объекта в средней точке участка наблюдения - Wcp/Vcp, определяется отношение значений баллистической функции к скорости (Еср/Vcp) в средней точке участка наблюдения. Кроме того из решения методом Эйлера упрощенных дифференциальных уравнений определяются начальные условия стрельбы (начальные угол и скорость выстреливания - Θ0, V0), время экстраполяции (полета) из средней точки участка наблюдения в точку вылета - tэ по зависимостям (4)-(5).
Далее в блоке задания начальных значений 12 обнуляются все значения весовых коэффициентов kj, по которым в итоге решается вопрос распознавания целей, не являющихся объектом разведки, кроме того задается начальное значение j=1 счетчику номеров параметров распознавания (j=1…Nnp, Nnp - число параметров распознавания), после чего в первом блоке сравнения 13 производится сравнение каждого j-го из Nnp параметров распознавания с априорно заданными пороговыми (эталонными) значениями для каждого соответствующего j-го параметра распознавания.
По результатам каждого j-го сравнения устанавливаются соответствующие значения весовых коэффициентов по j-му параметру распознавания:

Таким образом, при выполнении какого либо из приведенных условий (6) j-му весовому коэффициенту kj в блоке присвоения 14 присваивается значение, равное kj=1 и выполняется переход на вход блока счета 15, где накапливается значение номеров j. В противном случае (j-тое условие из (6) не выполняется), весовой коэффициент остается равным kj=0, и с выхода 2 первого блока сравнения 13 осуществляется переход на вход блока счета 15, где накапливается значение номеров j.
Информация о значениях весовых коэффициентах для каждого j после первого блока сравнения 13 накапливается до тех пор, пока j≤Nnp, что определяется вторым блоком сравнения 16.
При j=Nnp информация о значениях весовых коэффициентах с первого выхода второго блока сравнения 16 передается на вход блока суммирования 17, где определяется их суммарное значение: После чего результат суммирования (Ксум) передается на вход третьего блока сравнения 19, где осуществляется сравнение Ксум с пороговым значением.
Если Ксум>2 через второй выход третьего блока сравнения 19 подключается второй блок признака обработки 20, где вырабатывается команда «сброс траектории» с обработки как цель, не являющаяся объектом разведки, и этот блок является вторым выходом устройства.
Если Ксум≤2, через первый выход третьего блока сравнения 19 подключается первый блок признака обработки 18, где вырабатывается команда «обработка траектории» (полученная траектория принадлежит цели, которая является объектом разведки, и ее траектория подлежит дальнейшей обработке согласно прототипу). Для этого подключается первое пороговое устройство 3 и далее осуществляется работа устройства - прототипа.
Использование заявляемого устройства распознавания целей, не являющихся объектами разведки, как показали расчеты, проведенные на модели и по имеющимся в распоряжении авторов записям реальных траекторных измерений полета объектов при радиолокационном сопровождении, позволяет эффективно распознавать цели, не являющиеся объектом разведки РЛС РОП, и исключать их из траекторной обработки, что, в свою очередь, позволяет повысить точность и достоверность разведывательной информации РЛС РОП и увеличить ее пропускную способность.
Литература
1. Патент РФ №2231084, приоритет 14.08.2001 г.
2. Патент РФ №2412451, приоритет 21.07.2009 г.
3. Патент РФ №2264633, приоритет 8.01. 2004 г.
4. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М., Радио и связь, 1986, стр. 17, 172-173.
5. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., Сов. радио, 1974, стр. 373-374.
6. Ильчук А.Р., Канащенков А.И., Меркулов В.И. и др. Алгоритмы автоматического радиолокационного сопровождения целей в режиме обзора. М Радиотехника №11, 1999 год,стр. 3-20.
7. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания, М. «Радио и связь» 1984 г. - 152 с. Стр. 117-118.
8. Амиантов И.Н., Избранные вопросы статистической теории связи, «Советское радио» 1971. - 416 с. стр. 142-144.
9. Дмитриевский А.А., Внешняя баллистика. М., «Машиностроение», 1972, стр. 166-171.
10. Селекция и распознавание на основе локационной информации. Под редакцией А.Л. Горелика, М. «Радио и связь» 1990 г. - 240 с. Стр. 71-73.
11. А.Л. Горелик, В.А. Скрипкин. Методы распознавания, М. «Высшая школа», 1989.-232 с. Стр. 67.
12. Жданюк Б.Ф., Основы статистической обработки траекторных измерений. М., Сов. радио, 1974, стр. 24-26.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2001 |
|
RU2231084C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2005 |
|
RU2295739C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2011 |
|
RU2500000C2 |
| СПОСОБ РАСПОЗНАВАНИЯ КАЛИБРА СТРЕЛЯЮЩЕГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ ПО ПАРАМЕТРАМ СПЕКТРАЛЬНЫХ СОСТАВЛЯЮЩИХ ПРЕЦЕССИЙ И НУТАЦИЙ | 2013 |
|
RU2553419C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1995 |
|
RU2099744C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С МАЛЫМ КУРСОВЫМ УГЛОМ ПЕРЕМЕЩЕНИЯ | 2009 |
|
RU2410717C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2004 |
|
RU2265233C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2570111C1 |

Изобретение относится к области радиолокации и может быть использовано для дополнительного отсева ложной трассовой радиолокационной информации, полученной по результатам измерения текущих координат объекта на траектории. Техническим результатом изобретения является возможность снятия с обработки траекторий от целей, не являющихся объектами разведки РЛС РОП, до выполнения операций по распознаванию класса цели и определения координат ОП, что существенно повышает достоверность разведывательной информации и сокращает время траекторной обработки. Устройство распознавания целей, не являющихся объектами разведки, состоит из трех пороговых устройств, трех блоков сравнения, двух блоков признака обработки, блоков: сглаживания, преобразования сглаженных координат, памяти условных плотностей вероятности, определения максимума условной плотности вероятности, анализа возрастания значений доплеровской частоты, вычисления дополнительных параметров, задания начальных значений, присвоения, счета, суммирования, устройств запоминающего и сравнения. 2 ил.
Устройство распознавания целей, не являющихся объектами разведки, содержит запоминающее устройство, соединенное своим вторым выходом с блоком сглаживания, выход которого соединен с входом блока преобразования сглаженных координат, выход которого соединен с входом первого порогового устройства, где по знаку баллистической функции определяется характер рассматриваемого участка траектории, первый выход которого соединен с входом блока памяти условных плотностей вероятностей, выход которого соединен с входом блока определения максимума условной плотности вероятности, а второй выход первого порогового устройства соединен с входом второго порогового устройства, где по величине баллистической функции определяется класс цели, при этом первый и второй его выходы объединены с выходом блока определения максимума условной плотности вероятности и подключены к входу устройства сравнения, первый выход которого подключен к первому входу блока анализа возрастания значений доплеровской частоты, а к второму его входу подключен первый выход запоминающего устройства, при этом первый выход блока анализа возрастания значений доплеровской частоты соединен с входом третьего порогового устройства, а вторые выходы устройства сравнения, блока анализа возрастания значений доплеровской частоты и третьего порогового устройства, а также первый выход третьего порогового устройства объединены между собой и их общий выход является первым выходом устройства распознавания целей, не являющихся объектами разведки, отличающееся тем, что между входом первого порогового устройства и выходом блока преобразования сглаженных координат подключен первый вход блока вычисления дополнительных параметров, которые указывают на принадлежность объекта наблюдения к целям, не относящимся к объектам разведки, к выходу которого подсоединены последовательно соединенные блок задания начальных значений, где обнуляются значения весовых коэффициентов параметров распознавания, первый блок сравнения, где производится сравнение каждого из параметров распознавания с априорно заданным пороговым значением, блок присвоения, где весовым коэффициентам присваиваются единичные значения, блок счета, где вычисляются номера весовых коэффициентов, второй блок сравнения, где сравнивается текущий номер параметра распознавания с общим числом параметров распознавания, блок суммирования, где определяется суммарное значение весовых коэффициентов параметров распознавания, третий блок сравнения, где сравнивается сумма значений весовых коэффициентов параметров распознавания с пороговым значением, первый блок признака обработки, где вырабатывается команда «обработка траектории», принадлежащей цели, являющейся объектом разведки, выход которого подключен к входу первого порогового устройства, при этом к второму входу блока вычисления дополнительных параметров подключен первый выход запоминающего устройства, второй выход первого блока сравнения подключен к выходу блока присвоения, а второй выход второго блока сравнения подключен к второму входу первого блока сравнения, при этом третий блок сравнения своим вторым выходом подключен к входу второго блока признака обработки, выход которого является вторым выходом заявляемого устройства распознавания целей, не являющихся объектами разведки.
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2001 |
|
RU2231084C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ТРАССЫ ЦЕЛИ И ЛОЖНОЙ ТРАССЫ, ФОРМИРУЕМОЙ СИНХРОННОЙ ОТВЕТНОЙ ПОМЕХОЙ (ВАРИАНТЫ) | 2013 |
|
RU2534754C1 |
| ВЙВЛЙОТЕГСА | 0 |
|
SU184465A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМИ ЛАМПАМИ В ЛЕСОТЕХНИЧЕСКОЙ МАШИНЕ | 2014 |
|
RU2650396C2 |
| ВЫСОКОТЕМПЕРАТУРНЫЙ СВЕРХПРОВОДЯЩИЙ ЭЛЕКТРОМАГНИТНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ С РАДИАЛЬНЫМ ЗАЗОРОМ | 2016 |
|
RU2631673C1 |
| US 7903024 B2, 08.03.2011. | |||

