Изобретение относится к области радиолокационных технических средств определения координат точек вылета (падения) баллистических объектов.
Как следует из известных источников, в РЛС разведки огневых позиций стреляющих систем [1, 2, 3] для определения координат точек вылета (падения) применялись различные устройства, реализующие математические методы, обусловленные поставленными задачами и возможностями вычислительной техники.
По сущности технического решения наиболее близким к предлагаемому устройству является устройство определения координат точек вылета (падения) баллистических целей [4], реализованное в изделии "Зоопарк-1" [2, 3] и выбранное за прототип.
В устройстве, принятом за прототип, получаемые в результате автосопровождения баллистической цели (снаряда, мины, ракеты) на траектории амплитуды сигналов, соответствующие значениям текущих прямоугольных координат цели, сглаживаются полиномом второй степени. В результате сглаживания находятся оценки координат, скорости и ускорения для конца интервала сопровождения по трем координатам, характеризующим положение цели в пространстве. По этим оценкам рассчитываются оценки координат, скорости и ускорения для середины интервала наблюдения, их горизонтальные составляющие и значение баллистической функции Е, по которым производится распознавание класса стреляющих систем. Далее осуществляется определение координат точек вылета (падения) путем численного дифференцирования уравнений полета баллистического тела с учетом только сопротивления воздуха на каждом шаге экстраполяции.
Устройство определения координат, выбранное за прототип, приведено на фиг.1 в виде блок-схемы, описывающей последовательность решения отдельных задач [4] при определении координат точек вылета (падения) по параметрам, получаемым в результате автосопровождения баллистической цели на траектории.
На фиг.1:
1 - блок сглаживания (в [4] - модуль СГ);
2 - блок преобразования сглаженных координат (в [4] - модуль СРТ);
3 - блок распознавания (в [4] - модуль РАСП);
4 - блок анализа класса стреляющих систем (в [4] описана в модуле ЭКСТР);
5 - первый блок расчета функции лобового сопротивления (в [4] - модуль АВ);
6 - второй блок расчета функции лобового сопротивления (в [4] - модуль АВ);
7 - блок экстраполяции (в [4] - модуль ЭКСТР);
8 - блок учета кривизны Земли (в [4] - модуль ЭКСТР);
9 - блок выдачи информации.
Устройство, принятое за прототип, работает следующим образом.
На вход блока 1 поступает информация о прямоугольных координатах траектории полета баллистического объекта, получаемая в результате радиолокационного сопровождения цели. В блоке 1 осуществляется расчет по полиному второй степени ([4] п.3.8, [5]) оценок прямоугольных координат, скоростей и ускорений цели для конца интервала наблюдения. В блоке преобразования сглаженных координат 2 производится пересчет полученных оценок прямоугольных координат траектории полета баллистического объекта (цели), его скоростей и ускорений в середину интервала наблюдения, расчет горизонтальных составляющих скоростей и ускорений, а также баллистической функции Е ([4] п.3.9, [6]). По знаку баллистической функции и по условной плотности вероятности ([4] п.3.13, [7]) в блоке распознавания класса стреляющих систем 3 производится отнесение отметки к 1, 2, 3, 4, 5 или 6 классам. В блоке анализа класса стреляющих систем 4 производится отнесение отметки к 1 или 2 классу (артиллерия, минометы) или к 3, 4, 5, 6 классам (РСЗО, тактические ракеты, системы с активно-реактивным снаряжением).
Если цель относится к классам "артиллерия" или "миномет" (классы 1 и 2), управление с выхода 2 передается на первый блок расчета функции лобового сопротивления по закону сопротивления воздуха 1943 года - блок 5 ([4] п.3.10.1). Если цель относится к классам 3, 4, 5, 6, управление выхода 1 передается на второй блок расчета функции лобового сопротивления по закону сопротивления воздуха 1958 года - блок 6 ([4] п.3.10.2).
Далее управление с выходов блоков 5 или 6 передается на блок экстраполяции 7, где по зависимостям ([4], п.3.11), представляющих собой систему дифференциальных уравнений в дискретном виде, ведется расчет координат и соответствующих им проекций вектора скорости до высоты Н(i)-Нм ([4], п.3.11), что соответствует средней высоте местности в данном районе относительно высоты расположения РЛС. В данных уравнениях рассматривается движение относительно плоскости горизонта материального тела в однородном поле силы тяжести с учетом только лобового сопротивления воздуха [6]. Затем управление передается на блок учета кривизны Земли - 8 и потом на блок выдачи информации - 9, который осуществляет передачу данных о разведанных целях на экраны мониторов автоматизированных рабочих мест командира и оператора РЛС, а также передачу их по каналам связи на командный пункт разведки.
Как показали результаты моделирования по математической модели устройства определения координат, подтвержденные данными испытаний на полигоне, в случаях, когда скорость ветра была менее 10 м/с в режиме определения координат точек вылета при времени экстраполяции до 10-12 с, метеорологические и геофизические факторы (скорость и направление ветра, изменение давление, температуры, плотности воздуха по слоям, вращение Земли) не оказывают существенного влияния на точность определения координат точки выстрела.
Однако с увеличением дальности расположения "РЛС - точка вылета" или "РЛС - точка падения" и, соответственно, ввиду этого приближения наблюдаемого участка траектории к ее вершине увеличивается время экстраполяции в точку вылета или падения. На больших дальностях по условиям наблюдаемости цели на траектории возможна экстраполяция через вершину траектории. Это приводит к тому, что время экстраполяции до точки выстреливания может достигать половины и более всего полетного времени баллистического объекта на траектории, т.е. порядка 15-20 с. В этих условиях неучет метеорологических и геофизических факторов приводит к уменьшению точности определения координат точек вылета (падения) сопровождаемых объектов. Ошибки при этом достигают 75-110 м, а в некоторых критических случаях и значительно больше, в зависимости от времени экстраполяции, скорости ветра, типа стреляющей системы, скорости полета цели и угла наклона траектории относительно горизонтальной плоскости.
Недостатком прототипа является неучет перечисленных выше факторов, что приводит к снижению точности определения координат точек вылета (падения) баллистических целей при увеличении времени экстраполяции и в неблагоприятных метеоусловиях.
Целью настоящего изобретения и техническим результатом является повышение точности определения координат точек вылета (падения) баллистических целей при их сопровождении РЛС на больших дальностях и в неблагоприятных метеоусловиях.
Указанная цель достигается тем, что производится анализ знака вертикальной составляющей скорости цели в средней точке участка наблюдения Vh0, времени экстраполяции по параметрам наблюдаемого участка траектории и скорости ветра. В зависимости от их значений выбирается метод экстраполяции траектории в точку вылета (падения).
Если Vh0≤0 - участок наблюдения цели находится на вершине траектории или на ее нисходящем участке и экстраполяцию траектории необходимо проводить соответственно с вершины траектории или через нее, что однозначно свидетельствует о большом времени экстраполяции. При этих условиях необходим учет геофизических и метеорологических факторов, влияющих на точность определения координат точек вылета (падения). Это достигается использованием системы полных дифференциальных уравнений, учитывающих все перечисленные факторы.
Если Vh0>0 - участок наблюдения цели находится на восходящем участке траектории и поэтому требуется уточнение вида экстраполяции путем анализа величины времени экстраполяции. Анализ приближенного времени экстраполяции можно провести по зависимости:

где НРЛС - высота позиции РЛС;
НМ - предполагаемая высота позиции цели;
Н0 - высота полета цели в средней точке участка наблюдения;
Vh0 - вертикальная скорость полета цели в средней точке участка наблюдения;
tэкстр - время экстраполяции;
Е - баллистическая функция, учитывающая сопротивление воздуха в средней точке участка наблюдения.



где Wx0, Wy0 - проекции вектора сглаженного ускорения на оси Х и Y соответственно (рассчитываются в блоке преобразования сглаженных координат - блок 2);
Vx0, Vy0 - проекции вектора сглаженной скорости на оси Х и Y соответственно (рассчитываются в блоке преобразования сглаженных координат - блок 2).
Зависимость (1) представляет собой нелинейное уравнение относительно времени экстраполяции tэкстр. Уравнение (1) можно решить любым известным численным методом [8], например, методом деления отрезка пополам. Для этого представим уравнение (1) в виде
F(tэкстр)=0,
где
F(tэкстр)=|Vh0|tэкстр+4,9·tэкстр 2-3,27·|Е|·tэкстр 3-(НРЛС-НМ-Н0).
Первая производная функции F(tэкстр) имеет вид:
F'(tэкстр)=|Vh0|+9,8·tэкстр-9,81·|Е|·tэкстр 2.
Выберем начальное приближение для tэкстр: t0=0. Формула для n+1 приближения имеет вид:

Критерием окончания итерационного процесса будет условие:
|tn+1-tn|<0,1 с.
По полученному значению tэкстр и величине скорости ветра Vv:
- при 0,7 Vv+tэкстр>=14 определение координат точек вылета (падения) производится по полной системе дифференциальных уравнений с учетом геофизических и метеорологических факторов;
- при 0,7 Vv+tэкстр<14 определение координат точек вылета (падения) производится по упрощенной системе дифференциальных уравнений (блоки 7, 8).
Необходимость применения и упрощенной, и полной систем дифференциальных уравнений объясняется тем, что применение только полной системы дифференциальных уравнений увеличивает вычислительные и временные затраты на экстраполяцию и, следовательно, снижает пропускную способность РЛС. При работе же в реальной целевой обстановке число целей, находящихся на большой дальности (более 35 км), составляют не более 20-25% от общего целевого потока, но они чаще всего представляют собой средства большей степени важности, и, вследствие этого, необходимо более точное определение их координат. Поэтому необходимо применять адаптивный подход к выбору систем обработки информации.
Система полных дифференциальных уравнений представлена в нормальной земной системе координат OXHY. Ее начало находится в точке, соответствующей проекции РЛС на поверхность сферы радиусом Rз=6371000 м. Ось Х направлена на север, ось Н - вертикально вверх, ось Y дополняет систему координат до правой. Система дифференциальных уравнений движения центра масс баллистического тела в центральном поле силы тяжести имеет вид:





Интегрирование системы дифференциальных уравнений ведется до высоты, соответствующей району предполагаемого расположения точки вылета (падения) цели.
Функциональные зависимости, используемые в системе дифференциальных уравнений, имеют вид:
Er=C·Ht(τ)·G(Vr),

G(Vr)=4,736·10-4·Vr·CX(Vr),

g(h)=g0·(1-0.3147·10-6·h),
h=r-Rз,



где
Vx0, Vy0, Vh0 - начальные условия по скорости (проекции вектора скорости V на оси X, Y, Н соответственно в средней точке участка сопровождения - блок 2),
Н0 - высота средней точки участка сопровождения,
С - баллистический коэффициент,
CX(V) - функция лобового сопротивления воздуха, рассчитываемая по формулам:
- для 1 и 2 классов
при V≤272 м/с CX(V)=0,155;
при 272<V≤339 м/с CX(V)=0,524+0,0025·V;
при 339<V≤400 м/с CX(V)=0,000955·V;
при V>400 м/c CX(V)=0,475-0,0002325·V;
- для 3, 4, 5, 6 классов
при V≤288 м/с CX(V)=0,306;
при 288<V≤363 м/с CX(V)=0,8+0,00385·V;
при 363<V≤435 м/с CX(V)=0,47+0,00035·V;
при 435<V≤585 м/с CX(V)=0,935-0,00073·V;
при V>585 м/с CX(V)=0,715-0,00034·V;
τ(h), VvX(h), VvY(h) - действительные значения на высоте h температуры воздуха, проекций скорости ветра Vv на оси Х и Y нормальной земной системы координат - рассчитываются по данным метеорологического бюллетеня "Метеосредний" при подготовке к работе и хранятся в блоке 10,
Rз=6371000 м,
g0=9,78049.
Начальные условия интегрирования по координатам (X0,Y0,H0) и проекциям скорости (Vx0,Vy0,Vh0) формируются в блоке 2. Начальные условия по переменной π в (2) определяются интегрированием системы дифференциальных уравнений:


при начальных условиях  h0=hмст,
h0=hмст,
где ΔНмст и hмст - отклонение давления на уровне метеостанции от нормального и ее высота (данные берутся из метеорологического бюллетеня "Метеосредний" и хранятся в блоке 10).
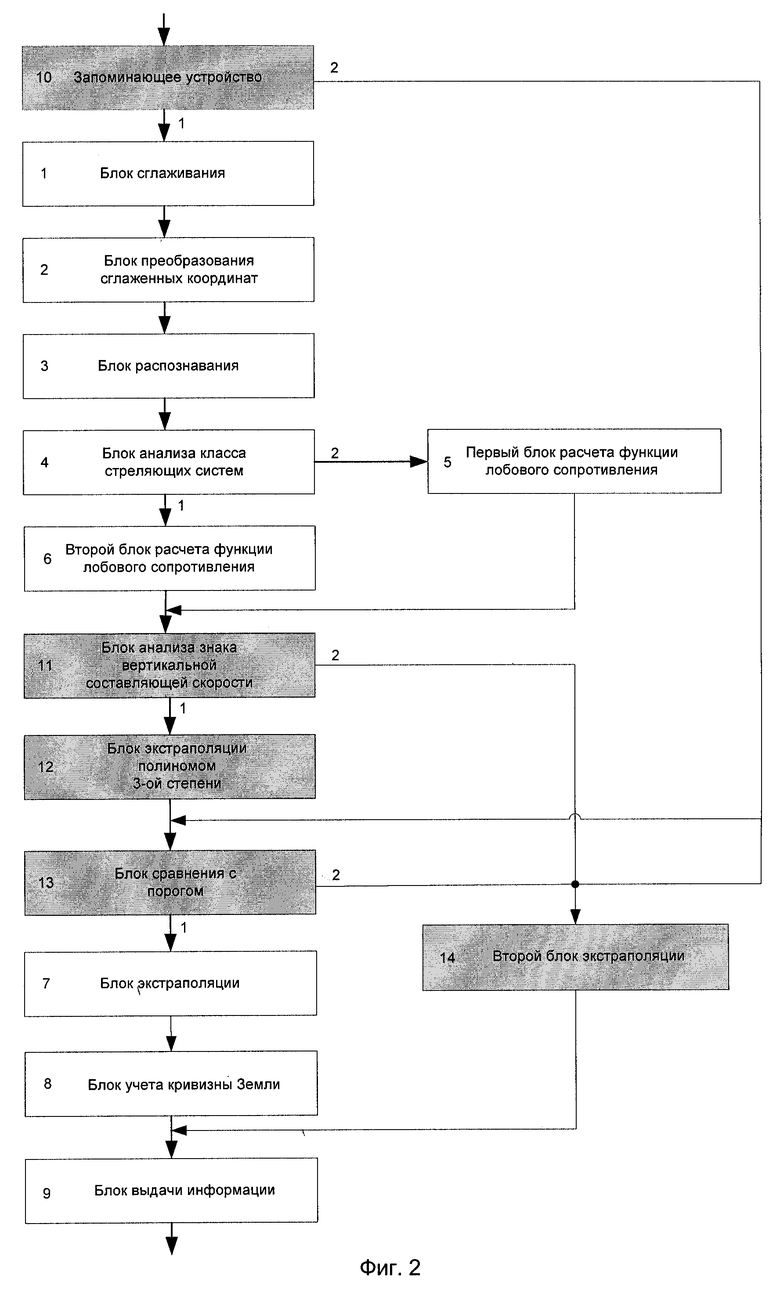
На фиг.2 изображена блок-схема предлагаемого устройства, позволяющего производить определение координат точек вылета (падения) баллистических целей по результатам радиолокационного наблюдения с большей точностью.
Устройство включает в себя следующие блоки:
1 - блок сглаживания;
2 - блок преобразования сглаженных координат;
3 - блок распознавания;
4 - блок анализа класса стреляющих систем;
5 - первый блок расчета функции лобового сопротивления;
6 - второй блок расчета функции лобового сопротивления;
7 - блок экстраполяции;
8 - блок учета кривизны Земли;
9 - блок выдачи информации;
10 - блок памяти;
11 - блок анализа знака вертикальной составляющей скорости;
12 - блок экстраполяции полиномом 3-й степени;
13 - блок сравнения с порогом;
14 - второй блок экстраполяции.
Заявляемое устройство работает следующим образом.
В процессе автосопровождения информация о прямоугольных координатах траектории полета баллистического объекта, получаемая в результате радиолокационного сопровождения цели, и данные о метеорологических условиях в районе работы РЛС (бюллетень "Метеосредний") поступают на вход блока памяти 10, где они запоминаются. С его первого выхода текущие прямоугольные координаты полета цели поступают на вход блока сглаживания 1 и одновременно со второго выхода данные о метеоусловиях передаются на входы блока сравнения с порогом 13 и второго блока экстраполяции 14 - блока экстраполяции по полной системе дифференциальных уравнений (2-3), где сохраняются и используются после передачи управления этим блокам. В блоке 1 вырабатываются сглаженные оценки прямоугольных координат, скоростей и ускорений цели в конце интервала наблюдения. Далее в блоке преобразования сглаженных координат 2 осуществляется пересчет сглаженных прямоугольных координат, скоростей и ускорений в середину интервала наблюдения, расчет горизонтальных составляющих скоростей и ускорений в середине интервала наблюдения, а также расчет баллистической функции Е. После чего в блоке распознавания 3 осуществляется отнесение полученной отметки к 1, 2, 3,4, 5 или 6 классам по знаку баллистической функции и по условной плотности вероятности. Далее в блоке анализа класса стреляющих систем 4 производится отнесение отметки к классам 1, 2 (артиллерия, минометы) или к классам 3, 4, 5, 6 (РСЗО, тактическая ракета на пассивном участке, тактическая ракета на активном участке, снаряды с активно-реактивным снаряжением).
Если цель относится к классам 1 или 2, управление с выхода 2 передается на первый блок расчета функции лобового сопротивления по закону сопротивления воздуха 1943 года - 5.
Если цель относится к классам 3, 4, 5 или 6, управление с выхода 1 передается на второй блок расчета функции лобового сопротивления по закону сопротивления воздуха 1958 года - блок 6.
Далее управление с выходов блоков 5 или 6 передается на блок анализа знака вертикальной составляющей скорости Vh0 - блок 11:
- если Vh0≤0, управление с выхода 2 блока анализа знака вертикальной составляющей скорости 11 передается на вход второго блока экстраполяции 14 - блок экстраполяции траектории по полной системе дифференциальных уравнений (2), (3);
- если Vh0>0, управление с выхода 1 блока 11 передается на вход блока экстраполяции полиномом 3-й степени (1) 12, где приближенно определяется время экстраполяции tэкстр из средней точки участка наблюдения до уровня предполагаемой высоты точки вылета (падения) цели.
По полученному tэкстр и значению скорости ветра Vv, поступающему со второго выхода блока памяти 10, в блоке сравнения с порогом 13 производится сравнение:
- если 0,7Vv+tэкстр>=14, управление с выхода 2 блока сравнения с порогом 13 передается на второй блок экстраполяции 14.
Таким образом, управление на вход второго блока экстраполяции 14 передается либо с второго выхода блока анализа вертикальной составляющей скорости - 11, либо с второго выхода блока сравнения с порогом 13, при этом во втором блоке экстраполяции 14 уже хранятся метеоданные, поступившие с второго выхода блока памяти 10.
- если 0,7 Vv+tэкстр<10, управление с выхода 1 блока сравнения с порогом 13 передается на блок экстраполяции 7, где производится расчет координат точки вылета (падения) по упрощенным зависимостям, и далее на блок учета кривизны Земли 8.
С выходов второго блока экстраполяции 14 или блока учета кривизны Земли 8 управление передается на вход блока выдачи информации 9 - блок выдачи данных, который осуществляет передачу данных о разведанных целях на экраны мониторов автоматизированных рабочих мест командира и оператора РЛС, а также передачу их по каналам связи на командный пункт разведки.
Использование заявляемого устройства, как показали расчеты, проведенные на модели и по имеющимся в распоряжении авторов записям реальных параметров траекторий полета различных баллистических целей (минометы, гаубицы, РСЗО, тактические ракеты), повышает точность определения координат точек вылета (падения) на больших дальностях и в неблагоприятных метеоусловиях по сравнению с устройством аналогичного назначения (прототип) на 20%. При этом время, затрачиваемое на обработку общего потока целей, находящихся на различных дальностях обнаружения, увеличивается незначительно (не более чем на 5%).
Литература
1. Jane's International Defense Review. - 2000. - № 3. - P.36-37, 39-43.
2. ADJ: ASIAN DEFENCE JOURNAL, март 2001, с.20-23.
3. Оружие России, каталог т. I. Вооружение Сухопутных Войск, 1996-1997 гг., АО "Милитэри Пэрэйд", 1996-1997 гг., Москва, с.106-107.
4. БД. 00001-03 13 01. С.105-120, с.125-131.
5. Амиантов И.Н. Избранные вопросы статистической теории связи. М.: Советское радио, 1971, с.142-144.
6. Дмитриевский А.А. М.: Машиностроение, 1972, с.166-173.
7. Жданюк Б.Ф. Основы статистической обработки траекторных измерений. М.: Советское радио, 1978, с.72-74.
8. Турчак Л.И. Основы численных методов: Учеб. пособие. - М.: Наука. Гл. ред. физ.-мат. лит., 1987, с.155-161.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКИХ ЦЕЛЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК ИХ ПУСКА И ПАДЕНИЯ ДЛЯ ОБЗОРНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2016 |
|
RU2612029C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ, НЕ ЯВЛЯЮЩИХСЯ ОБЪЕКТАМИ РАЗВЕДКИ | 2019 |
|
RU2726189C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2001 |
|
RU2231084C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2005 |
|
RU2295739C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2011 |
|
RU2500000C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДЛИТЕЛЬНОСТИ ИНТЕРВАЛА СОПРОВОЖДЕНИЯ ЦЕЛИ | 2018 |
|
RU2703277C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КАЛИБРА СТРЕЛЯЮЩЕГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ ПО ПАРАМЕТРАМ СПЕКТРАЛЬНЫХ СОСТАВЛЯЮЩИХ ПРЕЦЕССИЙ И НУТАЦИЙ | 2013 |
|
RU2553419C1 |
| Способ борьбы с артиллерией противника | 2018 |
|
RU2694421C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ДАВЛЕНИЯ АТМОСФЕРЫ ПО ЕЕ ПРОФИЛЮ | 2018 |
|
RU2691921C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
Изобретение относится к области радиолокационных технических средств определения координат точек вылета или падения баллистических объектов по результатам измерения их текущих координат на траектории. Достигаемым техническим результатом изобретения является повышение точности определения координат точек вылета (падения) без снижения пропускной способности при работе изделия на больших дальностях "РЛС - цель" и в неблагоприятных метеоусловиях. Для достижения поставленной цели в состав устройства введены блоки, обеспечивающие реализацию двух алгоритмов экстраполяции сопровождаемой траектории в точку вылета (падения) и их адаптивный выбор. В зависимости от результатов работы блоков адаптивного выбора экстраполяция в точку вылета (падения) ведется либо по упрощенным дифференциальным уравнениям полета баллистического тела, либо по полным уравнениям, учитывающим геофизические и метеорологические данные в районе работы РЛС. 2 ил.
Устройство определения координат, содержащее последовательно соединенные блок сглаживания, блок преобразования сглаженных координат, блок распознавания, блок анализа класса стреляющих систем, первый выход которого через первый блок расчета функции лобового сопротивления, а второй его выход через второй блок расчета функции лобового сопротивления соединены между собой, а также блок экстраполяции, выход которого соединен с последовательно соединенными блоками учета кривизны Земли и выдачи информации, отличающееся тем, что в него дополнительно введены блок памяти, последовательно соединенные блок анализа знака вертикальной составляющей скорости, блок экстраполяции полиномом 3-ой степени, блок сравнения с порогом, а также второй блок экстраполяции, при этом вход блока анализа знака вертикальной составляющей скорости соединен с объединенными выходами первого и второго блоков расчета функции лобового сопротивления, а первый выход блока памяти соединен с входом блока сглаживания, второй выход блока памяти соединен с входами второго блока экстраполяции и блока сравнения с порогом, первый выход которого соединен с входом блока экстраполяции, а второй его выход, объединенный с вторым выходом блока анализа знака вертикальной составляющей скорости и вторым выходом блока памяти, соединен с входом второго блока экстраполяции, выход которого соединен с входом блока выдачи информации, являющегося выходом устройства.
| Оружие России | |||
| Каталог | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вооружение Сухопутных Войск | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| АО "Милитэри Пэрэйд" | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| - М., с.106-107 | |||
| УСТРОЙСТВО РАСПОЗНАВАНИЯ СТРЕЛЯЮЩИХ СИСТЕМ | 2001 |
|
RU2231084C2 |
| RU 2000110823 А, 20.04.2002 | |||
| US 2002104390 A1, 08.08.2002 | |||
| WO 0248736 A1, 20.06.2002 | |||
| US 6362775 B1, 26.03.2002. | |||

