Изобретение относится к вибрационной технике и может быть использована при проектировании промышленных вибрационных установок, в частности установках для просеивания, вибротранспортировки и других операций.
Стремление к повышению производительности технологических операций определяет необходимость разработки систем управления, обеспечивающих высокое качество синхронизации роторов вибрационной установки в широком диапазоне режимов работы вибрационной установки.
Известна вибрационная машина [1. RU 153829 U1] для поверхностной обработки деталей, содержащая основание в виде нижней рамы, на которой смонтированы электродвигатель привода дебалансов, стойки для крепления промежуточных подшипниковых опор и упругих опор в виде пневмобаллонов, и верхнюю подвижную раму, предназначенную для установки контейнеров для обрабатываемых деталей, на которой смонтированы валы дебалансов, соединенные с валами привода через гибкие муфты, при этом верхняя подвижная рама связана с нижней рамой через упругие пневмоопоры, стойки которых связаны с пневмосистемой, содержащей амортизаторы. Вибрационная машина снабжена пневмосистемой управления, которая разветвлена на две независимые одинаковые по составу элементов линии, каждая из которых включает последовательно связанные между собой реле давления, пневмоклапан и регулятор уровня верхней подвижной рамы, содержащий рычаг, при этом рычаги упомянутых регуляторов уровня присоединены к верхней подвижной раме, каждый со своей стороны, а входы регуляторов связаны с пневмосистемой. Пневматическая система управления вибрационной машины обеспечивает автоматическую компенсации приложенной неравномерной нагрузки к верхней подвижной раме в результате дифференцированного по участкам регулирования давления сжатого воздуха в пневмобаллонах, и сохранение соосности валов дебалансов и валов привода независимо от массы колеблющегося груза и места его приложения на верхней раме, однако она не обеспечивает автоматического управления движением контейнера с грузом, что в конечном итоге является целью управления вибрационной установкой в режиме синхронизации.
Известна система управления амплитудой колебаний вибрационной технологической машины [2. RU 2748326 С1], принятая в качестве прототипа, которая содержит вибростол, вибровозбудители, устройство, формирующее задание по амплитуде колебаний, регулируемую за счет изменения внутреннего давления пневмоподвески, систему управления, изменяющую жесткость пневмоподвески и поддерживающую тем самым на заданном уровне амплитуду колебаний вибростола. Система управления содержит датчики амплитуды колебаний; автоматическую систему управления; первый контур управления, второй контур управления; задатчик амплитуды колебаний; регулятор со статической адаптацией; элемент «умножение-деление»; элемент «умножение-умножение»; фильтр низкой частоты; элемент обращения, выход которого представляет собой регулирующий сигнал давления пневмоподвески вибростола. Выходные сигналы автоматической системы управления, сформированные первым контуром управления и вторым контуром управления поступают на отработку по изменению давления в пневмоподвесках виброустановки. Таким образом, управление амплитудой колебаний осуществляется за счет изменения давления внутри регулируемой пневмоподвески, т.е. изменения ее эффективной упругости.
Недостатком известной системы [2] является то, что управление амплитудой колебаний вибрационной машины осуществляется только с учетом информации с датчика амплитуды колебаний без учета комплексной оценки вибрационной нагрузки на систему. При этом выход на требуемую величину амплитуды может сопровождаться синхронизацией роторов вибрационной установки в резонансном режиме, что может приводить к авариям и поломкам.
Основными режимами работы вибрационных установок являются режимы синхронизации и кратной синхронизации скоростей вращения роторов. Режим кратной синхронизации важен с точки зрения обеспечения устойчивых режимов вибротранспортировки за счет создания ненулевого в среднем ускорения платформы с грузом. При этом обеспечение устойчивого режима кратной синхронизации на высоких скоростях вращения является сложной задачей с точки зрения автоматического управления. Описанные выше системы управления [1, 2] не влияют на процесс синхронизации роторов.
Задачей изобретения является расширение арсенала технических средств, путем создания системы управления, обеспечивающей выход вибрационной установки на режим синхронизации или кратной синхронизации роторов двухроторной вибрационной установки при заданном уровне полной энергии вибрационной установки. Технический результат заявляемого изобретения заключается в обеспечении синхронизации или кратной синхронизации роторов двухроторной вибрационной установки при поддерживании на фиксированном уровне (заданном уровне) полной энергии вибрационной установки, что позволяет выходить на технологически эффективный режим колебаний груза, установленного на вибрационную установку.
Задача решается изменением конструкции.
Устройство управления двухроторной вибрационной установкой, характеризуется тем, что оно имеет две идентичные цепи управления работой электродвигателей, также устройство управления содержит общие элементы для обеих цепей: задатчик величины полной энергии двухроторной вибрационной установки, микроконтроллер расчета управляющих моментов, микроконтроллер оценки полной энергии вибрационной установки.
Первая цепь управления, осуществляющая управление первым электродвигателем, содержит: первый датчик угловой скорости, предназначенный для установки на валу первого электродвигателя, первый аналого-цифровой преобразователь, также содержит микроконтроллер расчета управляющего сигнала на первый электродвигатель, соединенный с первым цифро-аналоговым преобразователем. Выход первого датчика угловой скорости соединен с первым аналого-цифровым преобразователем, выход которого соединен с первым входом микроконтроллера оценки полной энергии вибрационной установки, также соединен с первым входом микроконтроллера расчета управляющих моментов и с первым входом первого микроконтроллера,
Вторая цепь управления, осуществляющая управление вторым электродвигателем, содержит: второй датчик угловой скорости, предназначенный для установки на валу второго электродвигателя, второй аналого-цифровой преобразователь, также содержит микроконтроллер расчета управляющего сигнала на второй электродвигатель, соединенный со вторым цифро-аналоговым преобразователем. Выход второго датчика угловой скорости соединен со вторым аналого-цифровым преобразователем, выход которого соединен со вторым входом микроконтроллера оценки полной энергии вибрационной установки, также соединен со вторым входом микроконтроллера расчета управляющих моментов и с первым входом второго микроконтроллера,
Устройство управления также содержит датчик вертикальных перемещений платформы, на которой монтируется контейнер вибрационной установки для сыпучей среды. Датчик вертикальных перемещений платформы соединен с третьим аналого-цифровым преобразователем, выход которого подсоединен к третьему входу микроконтроллера оценки полной энергии вибрационной установки, выход которого соединен третьим входом микроконтроллера расчета управляющих моментов, при этом его четвертый вход соединен с выходом задатчика величины полной энергии двухроторной вибрационной установки.
Для того, чтобы лучше продемонстрировать отличительные особенности изобретения в качестве примера, не имеющего какого-либо ограничительного характера, ниже описан предпочтительный вариант реализации.
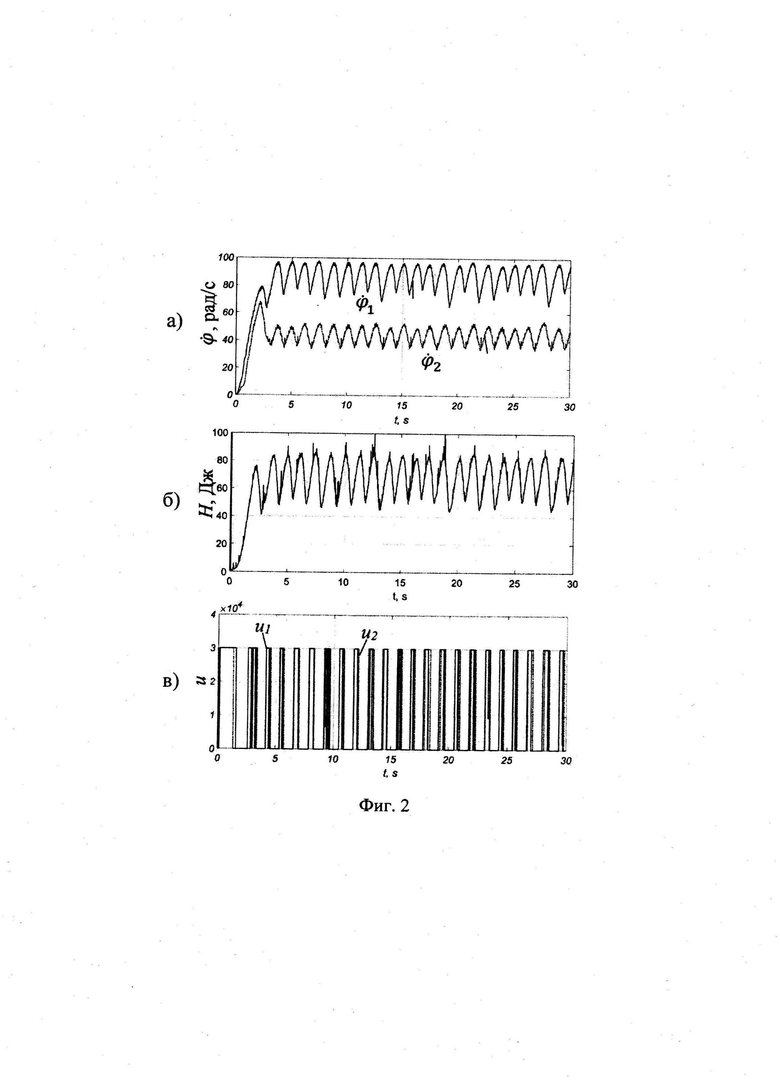
Пример реализации иллюстрируется фигурами, на которых представлено: Фиг. 1 - блок-схема вибрационной машины с заявляемой системой управления, Фиг. 2а - графики скоростей вращения роторов при кратной синхронизации, Фиг. 2б - график полной энергии вибрационной установки при кратной синхронизации, Фиг. 2в - графики управляющих сигналов, поступающих на левый и правый двигатели.
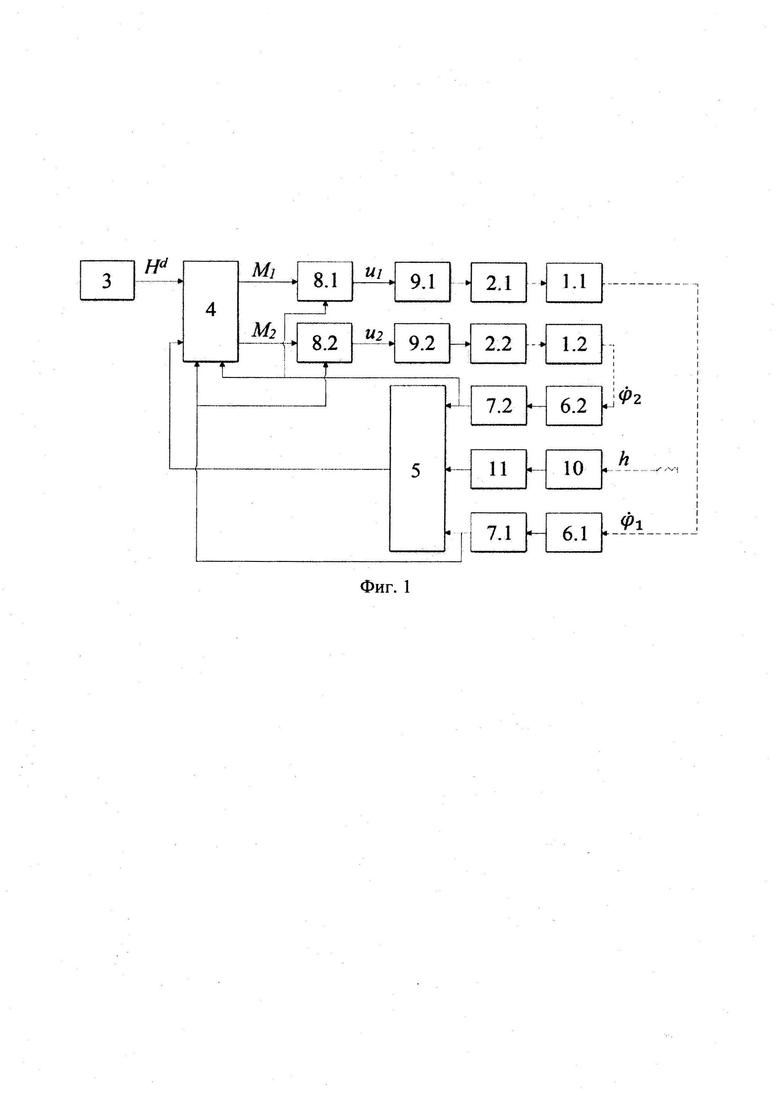
На блок-схеме (Фиг. 1.) представлена вибрационная установка, включающая платформу, на которой установлены два дебалансных вибровозбудителя 1.1 и 1.2, и устройство управления, а также двигатели 2.1 и 2.2, установленные на раме. Устройство управления имеет две идентичные цепи управления работой электродвигателей (2.1 - первый электродвигатель, 2.2 - второй электродвигатель), соответственно. В представленной схеме идентичные элементы этих цепей обозначены индексами 1 и 2 соответственно индексам электродвигателей. Также устройство управления содержит общие элементы для обеих цепей: задатчик 3 величины полной энергии Hd двухроторной вибрационной установки, микроконтроллер 4 расчета управляющих моментов М1 и М2, микроконтроллер 5 оценки полной энергии H вибрационной установки. Элементы вибрационной установки, включая дебалансные вибровозбудители 1.1 и 1.2, электродвигатели 2.1 и 2.2, и система управления установлены на платформе.
Первая цепь управления, осуществляющая управление первым электродвигателем 2.1, содержит: первый датчик 6.1 угловой скорости, расположенный на валу первого электродвигателя 2.1, первый аналого-цифровой преобразователь 7.1, также содержит микроконтроллер 8.1 расчета управляющего сигнала u1 на первый электродвигатель 2.1, соединенный с первым цифро-аналоговым преобразователем 9.1. Выход первого датчика 6.1 угловой скорости соединен с первым аналого-цифровым преобразователем 7.1, выход которого соединен с первым входом микроконтроллера 5 оценки полной энергии вибрационной установки, также соединен с первым входом микроконтроллера 4 расчета управляющих моментов и с первым входом первого микроконтроллера 8.1.
Вторая цепь управления, осуществляющая управление вторым электродвигателем 2.2, содержит: второй датчик 6.2 угловой скорости, расположенный на валу второго электродвигателя 2.2, второй аналого-цифровой преобразователь 7.2, также содержит микроконтроллер 8.2 расчета управляющего сигнала u2 на второй электродвигатель 2.2, соединенный со вторым цифро-аналоговым преобразователем 9.2. Выход второго датчика 6.2 угловой скорости соединен со вторым аналого-цифровым преобразователем 7.2, выход которого соединен со вторым входом микроконтроллера 5 оценки полной энергии вибрационной установки, также соединен со вторым входом микроконтроллера 4 расчета управляющих моментов и с первым входом второго микроконтроллера 8.2.
На платформе также установлен датчик 10 вертикальных перемещений h платформы, на которой монтируется контейнер вибрационной установки для сыпучей среды, соединенный с третьим аналого-цифровым преобразователем 11, выход которого подсоединен к третьему входу микроконтроллера 5 оценки полной энергии вибрационной установки, выход которого соединен третьим входом микроконтроллера 4 расчета управляющих моментов, при этом его четвертый вход соединен с выходом задатчик 3 величины полной энергии Hd двухроторной вибрационной установки.
Устройство управления двухроторной вибрационной установки работает следующим образом.
Информация об h с датчика 10 и об угловых скоростях вращения роторов  и
и  с датчиков 6.1 и 6.2 через аналого-цифровые преобразователи 7.1, и 7.2 поступает в устройство управления. В микроконтроллере 5 вычисляется текущее значение полной энергии Н вибрационной установки, которое используется в качестве отрицательной обратной связи. Из задатчика 3 в микроконтроллер 4 поступает задание по величине полной энергии Hd двухроторной вибрационной установки, а также информация о текущем значение этой величины Н и скоростях вращения роторов
с датчиков 6.1 и 6.2 через аналого-цифровые преобразователи 7.1, и 7.2 поступает в устройство управления. В микроконтроллере 5 вычисляется текущее значение полной энергии Н вибрационной установки, которое используется в качестве отрицательной обратной связи. Из задатчика 3 в микроконтроллер 4 поступает задание по величине полной энергии Hd двухроторной вибрационной установки, а также информация о текущем значение этой величины Н и скоростях вращения роторов  и
и 
Вычисление управляющих моментов M1 и М2 в микроконтроллере 4 осуществляется по расчетным формулам с учетом кратности синхронизации роторов, настроечных параметров определяемым индивидуально для каждого режима работы установки, моментов инерции роторов электродвигателей и в зависимости от того, в каком направлении вращаются роторы (в одном направлении или встречно).
Сигналы из микроконтроллера 4 о величине управляющих моментов М1 и М2, которые должны быть обеспечены асинхронными электродвигателями 2.1 и 2.2, поступают в микроконтроллеры 8.1 и 8.2 соответственно. Пересчет необходимых величин моментов в управляющие сигналы u1 и u2, которые требуется подать на вход электродвигателей 2.1 и 2.2 соответственно, производится с учетом индивидуальных электромеханических характеристик электродвигателей.
Вычисленные управляющие сигналы u1 и u2 через цифро-аналоговые преобразователи 9.1 и 9.2, соответственно, поступают на асинхронные электродвигатели 2.1 и 2.2, соединенные с дебалансными вибровозбудителями 1.1 и 1.2, соответственно, вращение которых возбуждает колебания платформы вибрационной установки.
Модель заявляемого устройства управления была испытана на экспериментальной вибрационной установке. В качестве примера работы системы управления представлены процессы в режиме кратной синхронизации роторов (n=2). Задание по значению полной энергии колебаний вибрационной установки принято Hd=60 Дж. На фиг. 2а продемонстрированы графики скоростей вращения роторов при кратной синхронизации. На фиг. 2б показан график полной энергии вибрационной установки при кратной синхронизации. На фиг. 2в показаны графики управляющих сигналов, поступающих на левый и правый двигатели. Из графиков виден выход вибрационной установки на режим кратной синхронизации, то есть скорость вращения первого ротора вдвое выше скорости вращения второго ротора (Фиг. 2а). При этом видно, что вычисляемое значение полной энергии системы H находится в районе заданного уровня 60 Дж (Фиг. 2б). Осцилляции в районе постоянных значений обусловлены ограничениями на величину управляющих сигналов u1 и u2 (Фиг. 2в).
Как видно из приведенного описания, в отличие от прототипа заявляемое устройство управления основано на энергетическом подходе, при котором задающим параметром для устройства управления является величина полной энергии вибрационной установки, что позволяет обеспечить режимы синхронизации и кратной синхронизации, контролируя совокупную вибрационную нагрузку на установку. Поддерживаемая за счет обратной связи на фиксированном уровне полная энергия вибрационной установки, позволяет обеспечивать требуемый режим колебаний груза, размещенного на двухроторной вибрационной установке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления вибрационной машиной с двумя дебалансными вибровозбудителями | 2023 |
|
RU2814668C1 |
| Устройство для настройки датчика угловых скоростей лазерного | 2020 |
|
RU2737027C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ЭЛЕКТРИЧЕСКИЙ ИНФОРМАЦИОННЫЙ СИГНАЛ | 2007 |
|
RU2327222C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО КОНТРОЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2376564C1 |
| УСТРОЙСТВО ВИБРАЦИОННОГО КОНТРОЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2375692C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| СИСТЕМА ВИБРАЦИОННОГО КОНТРОЛЯ | 2008 |
|
RU2371695C1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| Система управления приводами антенны станции наведения | 2022 |
|
RU2794200C1 |
| Дезинтегратор гипсокартона для получения сырья для производства лакокраски | 2023 |
|
RU2805591C1 |
Предложенное изобретение относится к вибрационной технике и может быть использовано при проектировании промышленных вибрационных установок, в частности установках для просеивания, вибротранспортировки и других операций. Устройство управления двухроторной вибрационной установкой характеризуется тем, что оно имеет две идентичные цепи управления работой электродвигателей, также устройство управления содержит общие элементы для обеих цепей: задатчик величины полной энергии двухроторной вибрационной установки, микроконтроллер расчета управляющих моментов, микроконтроллер оценки полной энергии вибрационной установки. Первая цепь управления, осуществляющая управление первым электродвигателем, содержит первый датчик угловой скорости, предназначенный для установки на валу первого электродвигателя, первый аналого-цифровой преобразователь, также содержит микроконтроллер расчета управляющего сигнала на первый электродвигатель, соединенный с первым цифро-аналоговым преобразователем, выход первого датчика угловой скорости соединен с первым аналого-цифровым преобразователем, выход которого соединен с первым входом микроконтроллера оценки полной энергии вибрационной установки, также соединен с первым входом микроконтроллера расчета управляющих моментов и с первым входом первого микроконтроллера. Вторая цепь управления, осуществляющая управление вторым электродвигателем, содержит второй датчик угловой скорости, предназначенный для установки на валу второго электродвигателя, второй аналого-цифровой преобразователь, также содержит микроконтроллер расчета управляющего сигнала на второй электродвигатель, соединенный со вторым цифро-аналоговым преобразователем, выход второго датчика угловой скорости соединен со вторым аналого-цифровым преобразователем, выход которого соединен со вторым входом микроконтроллера оценки полной энергии вибрационной установки, также соединен со вторым входом микроконтроллера расчета управляющих моментов и с первым входом второго микроконтроллера. Устройство также содержит датчик вертикальных перемещений платформы, на которой монтируется контейнер для сыпучей среды вибрационной установки, соединенный с третьим аналого-цифровым преобразователем, выход которого подсоединен к третьему входу микроконтроллера оценки полной энергии вибрационной установки, выход которого соединен третьим входом микроконтроллера расчета управляющих моментов, при этом его четвертый вход соединен с выходом задатчика величины полной энергии двухроторной вибрационной установки. Технический результат - обеспечение синхронизации или кратной синхронизации роторов двухроторной вибрационной установки при поддерживании на фиксированном уровне (заданном уровне) полной энергии вибрационной установки, что позволяет выходить на технологически эффективный режим колебаний груза, установленного на вибрационную установку. 2 ил.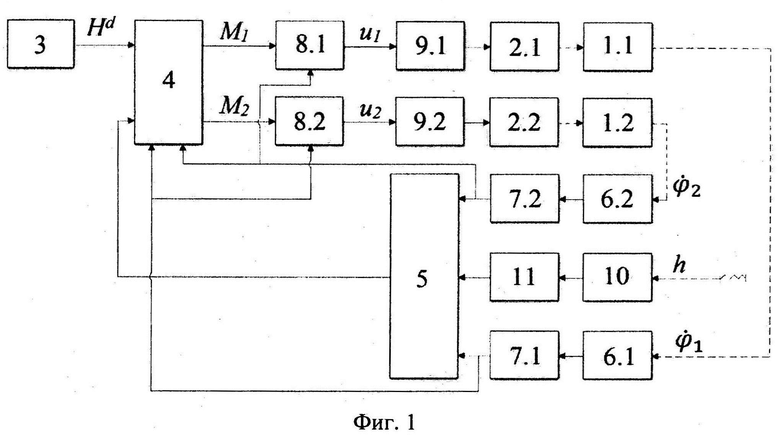
Устройство управления двухроторной вибрационной установкой, характеризующееся тем, что оно имеет две идентичные цепи управления работой электродвигателей, также устройство управления содержит общие элементы для обеих цепей: задатчик величины полной энергии двухроторной вибрационной установки, микроконтроллер расчета управляющих моментов, микроконтроллер оценки полной энергии вибрационной установки, при этом:
- первая цепь управления, осуществляющая управление первым электродвигателем, содержит: первый датчик угловой скорости, предназначенный для установки на валу первого электродвигателя, первый аналого-цифровой преобразователь, также содержит микроконтроллер расчета управляющего сигнала на первый электродвигатель, соединенный с первым цифро-аналоговым преобразователем, выход первого датчика угловой скорости соединен с первым аналого-цифровым преобразователем, выход которого соединен с первым входом микроконтроллера оценки полной энергии вибрационной установки, также соединен с первым входом микроконтроллера расчета управляющих моментов и с первым входом первого микроконтроллера;
- вторая цепь управления, осуществляющая управление вторым электродвигателем, содержит: второй датчик угловой скорости, предназначенный для установки на валу второго электродвигателя, второй аналого-цифровой преобразователь, также содержит микроконтроллер расчета управляющего сигнала на второй электродвигатель, соединенный со вторым цифро-аналоговым преобразователем, выход второго датчика угловой скорости соединен со вторым аналого-цифровым преобразователем, выход которого соединен со вторым входом микроконтроллера оценки полной энергии вибрационной установки, также соединен со вторым входом микроконтроллера расчета управляющих моментов и с первым входом второго микроконтроллера;
- устройство также содержит датчик вертикальных перемещений платформы, на которой монтируется контейнер для сыпучей среды вибрационной установки, соединенный с третьим аналого-цифровым преобразователем, выход которого подсоединен к третьему входу микроконтроллера оценки полной энергии вибрационной установки, выход которого соединен третьим входом микроконтроллера расчета управляющих моментов, при этом его четвертый вход соединен с выходом задатчика величины полной энергии двухроторной вибрационной установки.
| RU 2748326 C1, 24.05.2021 | |||
| Засыпное устройство для доменной печи | 1959 |
|
SU127271A1 |
| Устройство управления вибрационным грохотом | 1984 |
|
SU1209317A1 |
| Устройство для открытия диска сквозного прохода при жезловой сигнализации | 1933 |
|
SU38199A1 |
| WO 2007014444 A1, 08.02.2007 | |||
| КОСОЛАПОВ Д.С | |||
| Разработка и исследование микропроцессорной системы управления приводами двухроторных вибрационных машин, Автореферат, Санкт-Петербург, 2005 | |||
| ТОМЧИН Д | |||
| А | |||
| и др | |||
| Управление прохождением через область | |||

