Область техники
Настоящее изобретение относится к электронному измерительному устройству и способам определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера.
Предшествующий уровень техники
Известно применение массовых расходомеров Кориолиса для измерения массового расхода, плотности, объемного расхода и другой информации о материалах, текущих по трубопроводу (см., например, патент US №4491025, 01011985 г., и патент US 31450, 11.02.1982 г.). Эти расходомеры имеют одну или более расходомерных трубок различных конфигураций. Каждая конфигурация трубопровода может рассматриваться как имеющая набор мод собственных колебаний, включая, например, простые изгибающие, крутящие, радиальные моды и моды связанных колебаний. В типичном применении для измерения с помощью расходомера Кориолиса конфигурация трубопровода возбуждается на одной или более модах колебаний по мере того, как материал проходит по трубопроводу, и движение трубопровода измеряется в точках, пространственно разнесенных по трубопроводу.
Моды колебаний для систем, заполненных материалом, частично определяются совместной массой расходомерных трубок и материала внутри расходомерных трубок. Материал втекает в расходомер со стороны подключенного трубопровода через впуск расходомера. Далее материал направляется через расходомерную трубку или расходомерные трубки и выходит из расходомера в трубопровод, присоединенный к выпуску расходомера.
Посредством возбудителя прикладывают силу к расходомерной трубке. Сила заставляет расходомерную трубку колебаться. Когда через расходомер не протекает никакой материал, все точки вдоль расходомерной трубки колеблются с одинаковой фазой. Как только через расходомерную трубку начинает течь материал, ускорение Кориолиса приводит к тому, что каждая точка вдоль расходомерной трубки имеет разную фазу относительно других точек вдоль расходомерной трубки. Фаза на стороне впуска расходомерной трубки отстает от возбудителя, тогда как фаза на стороне выпуска опережает возбудитель. Датчики располагаются в различных точках на расходомерной трубке, чтобы создавать синусоидальные сигналы, представляющие движение расходомерной трубки в различных точках. Разность фаз между двумя сигналами датчика пропорциональна массовому расходу материала, протекающего через расходомерную трубку или расходомерные трубки. При одном подходе в предшествующем уровне техники для определения разности фаз между сигналами датчика используется дискретное преобразование Фурье (DFT) или быстрое преобразование Фурье (FFT). Разность фаз и колебательная частотная характеристика сборочного узла расходомерной трубки используются для получения массового расхода.
При одном подходе в предшествующем уровне техники независимый опорный сигнал используется для определения частоты сигнала тензодатчика, которая определяется с помощью сигнала определенной частоты, посылаемого на систему вибрационного возбудителя. При другом подходе в предшествующем уровне техники частота вибрации, генерируемая тензодатчиком, может быть определена путем совмещения этой частоты с центральной частотой узкополосного фильтра, и расходомер предшествующего уровня техники пытается поддерживать полосу подавления узкополосного фильтра на частоте тензодатчика. Этот способ, соответствующий предшествующему уровню техники, работает довольно хорошо в режиме равновесия, когда текущий материал в расходомере является однородным и когда результирующая частота сигнала датчика относительно стабильна. Однако фазовое измерение имеет недостатки, когда материал потока неоднороден, например, в двухфазных потоках, в которых материал потока содержит жидкость и твердое вещество, или когда в жидком материале потока присутствуют пузырьки воздуха. В таких ситуациях в известных устройствах определенная частота может быстро флюктуировать. В условиях быстрых и больших изменений частоты сигналы датчика могут выходить за полосу фильтра, давая в результате неправильные результаты измерения фазы и частоты. Это также является проблемой при дозированной откачке-наполнении-откачке, когда расходомер периодически работает в переключающихся режимах откачки и наполнения. Также, если частота датчика изменяется быстро, процесс демодуляции не сможет следить за фактической или измеренной частотой, вызывая демодуляцию на неправильной частоте. Должно быть понятно, что если определенная частота неправильна или неточна, то дальнейшие полученные значения плотности, объемного расхода и т.д. также будут неправильными и неточными. Кроме того, ошибка может включаться в дальнейшие определения характеристик потока.
В устройствах предшествующего уровня техники сигналы датчика могут оцифровываться и обрабатываться в цифровой форме, чтобы реализовать узкополосный фильтр. Через узкополосный фильтр сигнал проходит только в узкой полосе частот.Поэтому, когда целевая частота изменяется, узкополосный фильтр в течение некоторого времени может оказаться не в состоянии следить за целевым сигналом. Как правило, для цифрового узкополосного фильтра необходимо 1-2 секунды, чтобы отследить флюктуирующий целевой сигнал. Из-за времени, требующегося для определения частоты, результат состоит не только в том, что определения частоты и фазы содержат ошибки, но также и в том, что результат измерения с ошибкой охватывает период времени, превышающий период времени, в течение которого фактически возникает погрешность и/или двухфазный поток. Это происходит из-за относительно медленной реакции узкополосного фильтра.
Результатом является то, что расходомер предшествующего уровня техники не может точно, быстро или удовлетворительно отследить или определить частоту тензодатчика для двухфазного потока, текущего через расходомер материала. Следовательно, определение фазы также будет медленным и подверженным ошибке, поскольку в устройствах предшествующего уровня техники разность фаз определяется, используя определенную частоту тензодатчика. Поэтому любая погрешность в определении частоты входит в определение фазы. Результатом является повышенная погрешность при определении частоты и определении фазы, ведущая к повышенной погрешности в определении массового расхода. Кроме того, поскольку определенное значение частоты используется для определения значения плотности (плотность приблизительно равна единице, деленной на квадрат частоты), погрешность определения частоты повторяется или составляет часть погрешности при определении плотности. Это также справедливо при определении объемного расхода, где объемный расход равен массовому расходу, деленному на плотность.
Поскольку разность фаз может быть получена, используя определенную частоту, улучшенное определение частоты может обеспечить быстрое и достоверное определение разности фаз.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание измерительных электронных устройств и способов определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера, которые позволят улучшить определение частоты и обеспечить быстрое и достоверное определение разности фаз.
Согласно изобретению предложено измерительное электронное устройство для определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера. Измерительное электронное устройство содержит интерфейс для приема первого сигнала датчика и второго сигнала датчика и систему обработки, связанную с интерфейсом. Система обработки выполнена с возможностью приема первого сигнала датчика и второго сигнала датчика, создания фазового сдвига на девяносто градусов относительно первого сигнала датчика и вычисления частоты на основе первого сигнала датчика и фазового сдвига на девяносто градусов. Система обработки дополнительно выполнена с возможностью создания синусного и косинусного сигналов, используя частоту, и квадратурной демодуляции первого сигнала датчика и второго сигнала датчика, используя синусный и косинусный сигналы, для определения разности фаз.
Согласно изобретению предложен также способ определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера. Способ содержит следующие шаги: прием первого сигнала датчика и второго сигнала датчика, создание фазового сдвига на девяносто градусов относительно первого сигнала датчика и вычисление частоты на основе первого сигнала датчика и фазового сдвига на девяносто градусов. Способ дополнительно содержит создание синусного и косинусного сигналов, используя частоту. Способ дополнительно содержит квадратурную демодуляцию первого сигнала датчика и второго сигнала датчика, используя синусный и косинусный сигналы для определения разности фаз.
Способ определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера обеспечивается в соответствии с вариантом осуществления изобретения. Способ содержит прием первого сигнала датчика и второго сигнала датчика, создание фазового сдвига на девяносто градусов относительно первого сигнала датчика и вычисление частоты на основе первого сигнала датчика и фазового сдвига на девяносто градусов. Способ дополнительно содержит создание синусного и косинусного сигналов, используя частоту. Способ дополнительно содержит квадратурную демодуляцию первого сигнала датчика и второго сигнала датчика, используя синусный и косинусный сигналы, создавая с помощью квадратурной демодуляции первый демодулированный сигнал и второй демодулированный сигнал. Способ дополнительно содержит фильтрацию первого демодулированного сигнала и второго демодулированного сигнала, чтобы удалить высокочастотные компоненты, и взаимную корреляцию первого демодулированного сигнала и второго демодулированного сигнала, чтобы определить разность фаз.
В одном аспекте измерительного электронного устройства система обработки дополнительно выполнена с возможностью вычисления одной или более из следующих величин: массового расхода, плотности или объемного расхода, используя одну или более частот и разностей фаз.
Измерительное электронное устройство дополнительно выполнено с возможностью вычисления фазового сдвига на девяносто градусов, используя преобразование Гильберта.
В другом аспекте измерительного электронного устройства с помощью квадратурной демодуляции создается первый демодулированный сигнал и второй демодулированный сигнал, и система обработки дополнительно выполнена с возможностью фильтрации первого демодулированного сигнала и второго демодулированного сигнала, чтобы удалить высокочастотные составляющие, и взаимной корреляции первого демодулированного сигнала и второго демодулированного сигнала, чтобы определить разность фаз.
В одном аспекте способа способ дополнительно содержит вычисление одного или более из следующих параметров: массового расхода, плотности или объемного расхода, используя одну или более частот и разностей фаз.
В другом аспекте способ дополнительно содержит вычисление фазового сдвига на девяносто градусов, используя преобразование Гильберта.
Еще в одном аспекте способа с помощью квадратурной демодуляции создается первый демодулированный сигнал и второй демодулированный сигнал, и квадратурная демодуляция дополнительно содержит фильтрацию первого демодулированного сигнала и второго демодулированного сигнала, чтобы удалить высокочастотные составляющие, и взаимную корреляцию первого демодулированного сигнала и второго демодулированного сигнала, чтобы определить разность фаз.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
Фиг.1 изображает расходомер Кориолиса, согласно изобретению.
Фиг.2 изображает блок-схему измерительного электронного устройства согласно изобретению.
Фиг.3 - блок-схему части системы обработки, согласно изобретению.
Фиг.4 - блок преобразования Гильберта, согласно изобретению.
Фиг.5 - блок-схему частотной части блока анализа, согласно изобретению.
Фиг.6 - блок-схему фазоразностной части блока анализа, согласно изобретению.
Фиг.7 - блок-схему последовательности операций способа квадратурной демодуляции разности фаз, согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг.1-7 представлены конкретные примеры реализации изобретения. При изложении принципов изобретения некоторые традиционные аспекты были упрощены или опущены. Специалистам в данной области техники ясно, что признаки, описанные ниже, могут быть объединены различными способами, чтобы образовать многочисленные варианты изобретения. В результате, изобретение ограничивается не конкретными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
На фиг.1 показан расходомер 5 Кориолиса, содержащий сборочный узел 10 измерителя и измерительное электронное устройство 20. Сборочный узел 10 измерителя формирует сигнал массового расхода и плотности проходящего материала. Измерительное электронное устройство 20 соединено со сборочным узлом 10 измерителя кабелем 100, чтобы через тракт 26 обеспечивать информацию о плотности, массовом расходе и температуре, а также другую информацию, не имеющую отношения к настоящему изобретению. Описывается конструкция расходомера Кориолиса, хотя специалистам в данной области техники очевидно, что настоящее изобретение на практике может быть осуществлено как денситометр с вибрирующей трубкой без возможности дополнительного измерения, предоставляемой массовым расходомером Кориолиса.
Сборочный узел 10 измерителя содержит пару патрубков 150 и 150', фланцы 103 и 103', имеющие фланцевые горловины 110 и 110', пару параллельных расходомерных трубок 130 и 130', механизм 180 возбудителя, температурный датчик 190 и пару датчиков 170L и 170R скорости. Расходомерные трубки 130 и 130' имеют два, по существу, прямых впускных участка 131 и 131' и выпускные участки 134 и 134', которые сходятся друг к другу на блоках 120 и 120' крепления расходомерных трубок. Расходомерные трубки 130 и 130' изгибаются в двух симметрично расположенных по их длине местах и, по существу, параллельны по всей их длине. Соединительные скобы 140 и 140' служат для определения оси W и W', относительно которой колеблется каждая расходомерная трубка.
Боковые участки 131, 131' и 134, 134' расходомерных трубок 130 и 130' прочно присоединены к блокам 120 и 120' крепления расходомерных трубок, а эти блоки, в свою очередь, прочно прикреплены к патрубкам 150 и 150'. Это обеспечивает непрерывный закрытый путь прохождения материала через сборочный узел 10 расходомера Кориолиса.
Когда фланцы 103 и 103', имеющие отверстия 102 и 102', присоединены с помощью впускного конца 104 и выпускного конца 104' к технологической линии (не показана), по которой проходит технологический материал, который измеряется, материал входит в конец 104 измерителя через отверстие 101 на фланце 103, пропускается через патрубок 150 к блоку 120 крепления расходомерной трубки, имеющему поверхность 121. Внутри патрубка 150 материал разделяется и направляется через расходомерные трубки 130 и 130'. После выхода из расходомерных трубок 130 и 130' технологический материал снова объединяется в единый поток внутри патрубка 150' и после этого направляется к выходному концу 104', присоединяемому фланцем 103', имеющим отверстия 102' для болтов, и далее в технологическую линию (не показана).
Расходомерные трубки 130 и 130' выбираются и соответственно крепятся к блокам 120 и 120' крепления расходомерных трубок, чтобы иметь, по существу, одно и то же распределение масс, моменты инерции и модуль продольной упругости относительно осей изгиба W-W и W'-W', соответственно. Оси изгиба проходят через соединительные скобы 140 и 140'. Поскольку модули продольной упругости расходомерных трубок изменяются с температурой и это изменение влияет на вычисление потока и плотности, резистивный температурный датчик 190 (RTD) крепится к расходомерной трубке 130', чтобы непрерывно измерять температуру расходомерной трубки. Температура расходомерной трубки и, следовательно, напряжение, появляющееся на выводах RTD для данного потока, проходящего через него, управляется температурой материала, проходящего через расходомерную трубку. Температурно-зависимое напряжение, появляющееся на выводах RTD, используется хорошо известным способом измерительным электронным устройством 20, чтобы компенсировать изменение модуля упругости расходомерных трубок 130 и 130' за счет любых изменений температуры расходомерной трубки. RTD подключен к измерительному электронному устройству 20 кабелем 195.
Обе расходомерные трубки 130 и 130' приводятся в движение механизмом 180 возбудителя в противоположных направлениях относительно их соответствующих осей изгиба W и W' в режиме, который называется первым режимом несинфазного изгиба расходомера. Механизм 180 возбудителя может содержать любое из многих хорошо известных решений, таких как магнит, прикрепленный к расходомерной трубке 130', и расположенную напротив катушку, прикрепленную к расходомерной трубке 130 и через которую пропускается переменный ток для создания вибрации обеих расходомерных трубок. Соответствующий сигнал возбуждения прикладывается измерительным электронным устройством 20 через кабель 185 к механизму 180 возбудителя.
Измерительное электронное устройство 20 принимает температурный сигнал RTD, приходящий по кабелю 195, и сигналы левого и правого датчиков скорости, возникающие на кабелях 165L и 165R, соответственно. Измерительное электронное устройство 20 создает сигнал возбуждения, появляющийся на кабеле 185, чтобы приводить в движение элемент 180 и заставить вибрировать трубки 130 и 130'. Измерительное электронное устройство 20 обрабатывает сигналы левого и правого датчиков скорости и сигнал RTD, чтобы вычислить массовый расход и плотность материала, проходящего через сборочный узел 10 измерителя. Эта информация, наряду с другой информацией передается измерительным электронным устройством 20 через тракт 26 на исполнительное средство 29.
На фиг.2 показана блок-схема измерительного электронного устройства 20 в соответствии с вариантом осуществления изобретения. Измерительное электронное устройство 20 может содержать интерфейс 201 и систему 203 обработки. Измерительное электронное устройство 20 принимает первый и второй сигналы 210 и 211 датчика от сборочного узла 10 измерителя, такие как сигналы тензодатчика/датчика скорости. Измерительное электронное устройство 20 может работать как массовый расходомер или может работать как денситометр, в том числе как расходомер Кориолиса. Измерительное электронное устройство 20 обрабатывает первый и второй сигналы 210 и 211 датчика, чтобы получить характеристики потока материала, протекающего через сборочный узел 10 измерителя. Например, измерительное электронное устройство 20 может определять одну или более разностей фаз, частоту, разность во времени (Δt), плотность, массовый расход и объемный расход на основе, например, сигналов датчика. Кроме того, в соответствии с изобретением могут быть определены прочие характеристики потока. Их определения обсуждаются ниже.
Определение разности фаз и определение частоты осуществляются гораздо быстрее и более точно и достоверно, чем такие же определения на предыдущем уровне техники. Это с успехом сокращает время обработки, требующееся для вычисления характеристик потока, и увеличивает точность обеих характеристик потока. Следовательно, как частота, так и разность фаз могут быть определены гораздо быстрее, чем в предшествующем уровне техники.
Способы определения частоты в предшествующем уровне техники обычно занимают для их выполнения 1-2 секунды. Напротив, определение частоты в соответствии с изобретением может быть выполнено меньше, чем за 50 миллисекунд (мс). Предполагается еще более быстрое определение частоты, в зависимости от типа и конфигурации системы обработки, частоты выборки значений колебательной реакции, размеров фильтра, частоты децимации и т.д. При скорости определения частоты 50 мс измерительное электронное устройство 20 в соответствии с изобретением может действовать приблизительно в 40 раз быстрее, чем в предшествующем уровне техники.
Интерфейс 201 принимает сигнал датчика от одного из датчиков 170L и 170R скорости через кабель 100, как показано на фиг.1. Интерфейс 201 может выполнять любое необходимое или желательное формирование сигнала, такое как любой способ форматирования, усиление, буферизация и т.д. Альтернативно, некоторое или все форматирование сигнала может быть выполнено в системе 203 обработки.
Кроме того, интерфейс 201 может позволить осуществление связи между измерительным электронным устройством 20 и внешними устройствами. Интерфейс 201 может иметь возможность любого вида электронной, оптической или беспроводной связи.
Интерфейс 201 в одном варианте осуществления соединен с цифровым преобразователем 202, в котором сигнал датчика содержит сигнал аналогового датчика. Цифровой преобразователь 202 осуществляет выборку и отцифровывает аналоговый сигнал датчика и создает цифровой сигнал датчика. Цифровой преобразователь 202 может также выполнять любую необходимую децимацию, чтобы уменьшить объем необходимой обработки сигнала и сократить время обработки. Децимация будет более подробно обсуждена ниже.
Система 203 обработки проводит операции измерительного электронного устройства 20 и обрабатывает результаты измерений потока, поступающие от сборочного узла 10 расходомера. Система 203 обработки выполняет одну или более программ обработки и таким образом обрабатывает результаты измерений потока, чтобы получить одну или более характеристик потока.
Система 203 обработки может содержать универсальный компьютер, микропроцессорную систему, логическую схему или некоторое другое универсальное или специализированное устройство обработки. Система 203 обработки может быть распределенной между многочисленными устройствами обработки. Система 203 обработки может содержать любой вид интегрального или независимого электронного носителя данных типа запоминающей системы 204.
Система 203 обработки обрабатывает первый сигнал 210 датчика и второй сигнал 211 датчика, чтобы определить одну или более характеристик потока. Одна или более характеристик потока могут содержать, например, разность фаз, частоту, разность во времени (Δt), массовый расход и/или плотность протекающего материала.
В описываемом варианте осуществления система 203 обработки определяет характеристики потока на основе двух сигналов 210 и 211 датчика и единого фазового сдвига 213 на 90 градусов. Система 203 обработки может определить, по меньшей мере, разность фаз и частоту на основе двух сигналов 210 и 211 датчика и единого фазового сдвига 213 на 90 градусов. Кроме того, система 203 обработки может, среди прочих вещей, дополнительно определять разность фаз, разность во времени (Δt) и/или массовый расход протекающего материала потока.
Запоминающая система 204 может хранить параметры и данные расходомера, программное обеспечение, значения констант и значения переменных. В одном варианте осуществления запоминающая система 204 содержит программы, которые выполняются системой 203 обработки. В одном варианте осуществления запоминающая система 204 хранит программу 212 определения фазового сдвига, программу 215 определения разности фаз, программу 216 определения частоты, программу 217 определения разности во времени (Δt) и программу 218 определения характеристик потока.
В варианте осуществления запоминающая система 204 содержит переменные, используемые для работы расходомера, такого как расходомер 5 Кориолиса. Запоминающая система 204 хранит переменные, такие как первый сигнал 210 датчика и второй сигнал 211 датчика, которые принимаются от датчиков скорости/тензодатчиков 170L и 170R. Кроме того, запоминающая система 204 может хранить фазовый сдвиг 213 на 90 градусов, созданный для определения характеристик потока.
В варианте осуществления запоминающая система 204 хранит одну или более характеристик потока, полученных из результатов измерений потока. Запоминающая система 204 хранит характеристики потока, такие как разность 220 фаз, частоту 221, разность 222 во времени (Δt), массовый расход 223, плотность 224 и объемный расход 225.
Программа 212 определения сдвига фаз выполняет фазовый сдвиг на 90 градусов для входного сигнала, то есть сигнала 210 датчика. Программа 212 фазового сдвига осуществляет преобразование Гильберта (обсуждается ниже).
Программа 215 определения разности фаз определяет разность фаз, используя квадратурную демодуляцию. Дополнительная информация может также использоваться для вычисления разности фаз. Разность фаз вычисляется на основе первого сигнала 210 датчика, второго сигнала 211 датчика и частоты 221. Определенная разность фаз может быть запомнена в части 220 разности фаз запоминающей системы 204. Разность фаз, которая определяется, используя определенную частоту 221, может быть вычислена и получена гораздо быстрее, чем в предшествующем уровне техники. Это может обеспечить критическую разницу в применениях расходомеров, имеющих высокий расход, или когда возникают многофазные потоки.
Программа 216 определения частоты определяет частоту (такую как та, которая представляется первым сигналом 210 датчика или вторым сигналом 211 датчика) на основе фазового сдвига 213 на 90 градусов. Определенная частота может быть сохранена в частотной части 221 запоминающей системы 204. Частота, которая определяется на основе единого фазового сдвига 213 на 90 градусов и сигнала 210 или 211 датчика, может быть вычислена и получена гораздо быстрее, чем в предшествующем уровне техники. Это может обеспечить критическую разницу в применениях расходомеров, имеющих высокий расход, или когда пропускают многофазные потоки.
Программа 217 определения разности во времени (Δt) определяет разность во времени (Δt) между первым сигналом 210 датчика и вторым сигналом 211 датчика. Разность во времени (Δt) может быть запомнена в разностной части 222 во времени (Δt) запоминающей системы 204. Разность во времени (Δt) содержит, в сущности, определенную фазу, поделенную на определенную частоту, и поэтому используется для определения массового расхода.
Программа 218 определения характеристик потока может определять одну или более характеристик потока. Программа 218 характеристик потока может использовать определенную разность 220 фаз и определенную частоту 221, например, для получения в итоге дополнительных характеристик потока. Следует понимать, что для этих определений может потребоваться дополнительная информация, например массовый расход или плотность. Программа 218 определения характеристик потока может определять массовый расход на основе разности 222 во времени (Δt) и, следовательно, на основе разности 220 фаз и частоты 221. Формула определения массового расхода раскрыта в патенте US №5027662. Массовый расход связан с массовым расходом материала, протекающего через сборочный узел 10 измерителя. Аналогично, программа 218 определения характеристик потока может также определять плотность 224 и/или объемный расход 225. Определенный массовый расход, плотность и объемный расход могут быть запомнены в блоках, соответствующих массовому расходу 223, плотности 224 и объемному расходу 225 запоминающей системы 204, соответственно. Кроме того, характеристики потока могут быть переданы на внешние устройства измерительным электронным устройством 20.
На фиг.3 показана блок-схема 300 части системы 203 обработки в соответствии с вариантом осуществления изобретения. Блоки представляют либо схему обработки, либо операции/программы обработки. Блок-схема 300 содержит блок 301 фильтра каскада 1, блок 302 фильтра каскада 2, блок 303 преобразования Гильберта и блок 304 анализа. Входы LPO и RPO содержат вход сигнала левого тензодатчика и вход сигнала правого тензодатчика. LPO или RPO может содержать первый сигнал датчика.
В одном варианте осуществления блок 301 фильтра каскада 1 и блок 302 фильтра каскада 2 содержат цифровые фильтры полифазной децимации с конечной импульсной характеристикой (FIR), реализованные в системе 203 обработки. Эти фильтры обеспечивают оптимальный способ фильтрации и децимации одного или обоих сигналов датчика, с фильтрацией и децимацией, выполняемыми в одно и то же хронологическое время и с одной и той же частотой децимации. Альтернативно, блок 301 фильтра каскада 1 и блок 302 фильтра каскада 2 могут содержать фильтры с бесконечной импульсной характеристикой (IIR) или другие соответствующие цифровые фильтры или процессы фильтрации. Однако следует понимать, что возможны другие процессы фильтрации и/или варианты осуществления фильтрации, которые находятся в пределах объема описания и формулы изобретения.
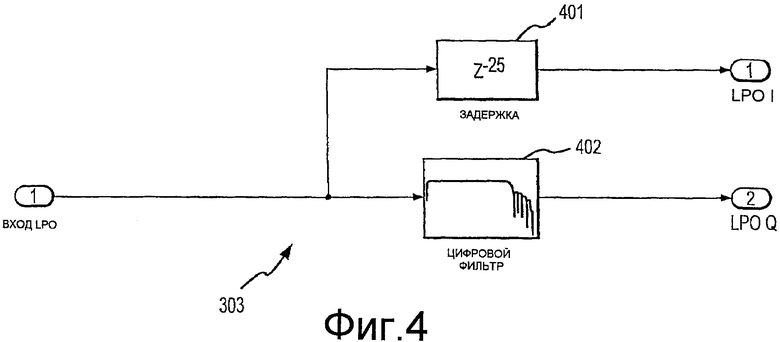
На фиг.4 показан блок 303 преобразования Гильберта в соответствии с вариантом осуществления изобретения. Блок 303 преобразования Гильберта содержит блок 401 задержки LPO, подключенный параллельно блоку 402 фильтра LPO. Блок 401 задержки LPO вводит задержку выборки. Блок 401 задержки LPO выбирает цифровые выборки сигнала LPO, которые хронологически запаздывают во времени, относительно цифровых выборок сигнала LPO, которые фильтруются блоком 402 фильтра LPO. Блок 402 фильтра LPO выполняет фазовый сдвиг на 90 градусов входящих выборок цифрового сигнала.
Блок 303 преобразования Гильберта является первым этапом к обеспечению измерения фазы. Блок 303 преобразования Гильберта принимает отфильтрованные, прошедшие децимацию сигналы LPO и RPO и выполняет преобразование Гильберта. Преобразование Гильберта формирует версии сигнала LPO со сдвигом на 90 градусов. Выход блока 303 преобразования Гильберта обеспечивает новый квадратурный (Q) компонент LPO Q и, наряду с оригиналом, синфазные (I) компоненты сигнала LPO I.
Входной сигнал блока 303 преобразования Гильберта может быть представлен следующим образом:

Используя преобразование Гильберта, выходной сигнал становится следующим:

Объединение исходных членов с выходным сигналом преобразования Гильберта дает в результате:

На фиг.5 показана блок-схема частотной части 500 блока 304 анализа в соответствии с вариантом осуществления изобретения. Блок 304 анализа в описываемом варианте осуществления является заключительным этапом измерения частоты и разности во времени (Δt). Частотная часть 500 определяет частоту на основе синфазной (I) и квадратурной (Q) компонент одного сигнала датчика. Частотная часть 500 может использовать сигнал левого или правого тензодатчика (LPO или RPO). Частотная часть 500 использует сигнал LPO. Частотная часть 500 содержит объединяющий блок 501, блок 502 сопряжения, блок 503 выборки, блок 504 комплексного перемножения, блок 505 фильтра, блок 506 фазового угла, блок 507 константы и блок 508 деления.
Объединяющий блок 501 принимает синфазные (I) и квадратурные (Q) компоненты сигнала датчика и передает их дальше. Блок 502 сопряжения выполняет сопряжение сигнала датчика, в данном случае сигнала LPO. Блок 503 задержки вводит задержку выборки и, следовательно, делает выборку цифрового сигнала, которая хронологически является более ранней по времени. Эта более ранняя выборка цифрового сигнала перемножается с текущим цифровым сигналом в блоке 504 комплексного перемножения. Блок 504 комплексного перемножения перемножает сигнал LPO и сопряженный с LPO сигнал, реализуя приведенное ниже уравнение (4). Блок 505 фильтра реализует цифровой фильтр типа фильтра с конечной импульсной характеристикой (FIR), обсуждавшегося ранее. Блок 505 фильтра может содержать полифазный фильтр децимации, который используется для удаления гармонических составляющих из синфазной (I) и квадратурной (Q) компонент сигнала датчика, а также для проведения децимации сигнала. Коэффициенты фильтра могут выбираться так, чтобы обеспечивать децимацию введенного сигнала, такую как, например, децимация с коэффициентом 10. Блок 506 фазового угла 506 определяет угол разности фаз по синфазной (I) и квадратурной (Q) компонентам сигнала LPO. Блок 506 фазового угла реализует часть приведенного ниже уравнения (5). Блок 507 константы обеспечивает коэффициент, содержащий частоту выборки Fs, деленную на два пи (π), как показано в уравнении (6). Блок 508 деления выполняет операцию деления уравнения (6).
Обработка по частоте реализует следующее уравнение:

Угол между двумя последовательными выборками равен, следовательно:

который является углом, представленным через круговую частоту левого датчика скорости. Эта частота преобразуется в Герцы следующим образом:

где Fs является частотой блока 303 преобразования Гильберта. В ранее обсуждавшемся примере "Fs" равна приблизительно 2 кГц.
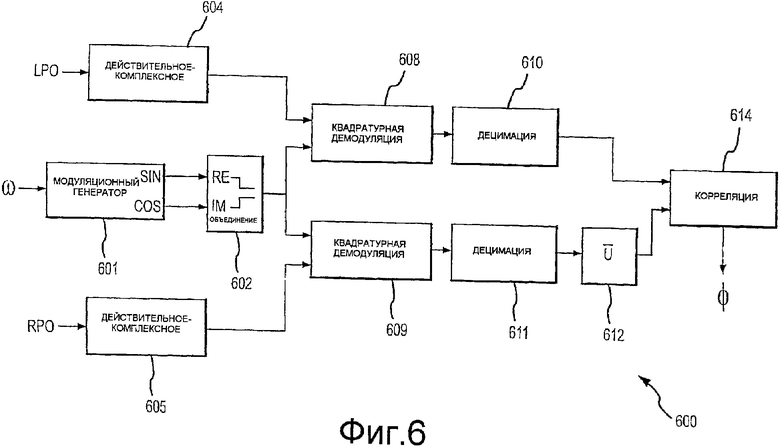
На фиг.6 показана блок-схема фазоразностной части 600 блока 304 анализа, соответствующей варианту осуществления изобретения. На выходе фазоразностной части 600 присутствует разность фаз между входным сигналом LPO и входным сигналом RPO. Фазоразностная часть 600 может содержаться в блоке 304 анализа вместе с частотной частью 500 (фиг.5). Блоки соответствуют либо схеме обработки, либо операциям/программам обработки. Фазоразностная часть 600 содержит блок 601 модуляционного генератора, объединяющий блок 602, блоки 604 и 605 действительных-комплексных преобразований, блоки 608 и 609 квадратурной демодуляции, блоки 610 и 611 децимации, блок 612 комплексного сопряжения и блок 614 корреляции.
Блок 601 модуляционного генератора формирует синусный и косинусный члены из круговой частоты (ω), которая присутствует на выходе частотной части 500. Блок 601 модуляционного генератора принимает опорную частоту от частотной части 500. Поскольку частота на выходе частотной части 500 может быть получена намного быстрее и более надежно, чем в предшествующем уровне техники, определение разности фаз также может быть произведено намного быстрее и более надежно, чем в предшествующем уровне техники. Синусный и косинусный члены содержат синфазную (I) и квадратурную (Q) компоненты сигнала опорной частоты. Синусный и косинусный члены, созданные блоком 601 модуляционного генератора, вводятся в объединяющий блок 602.
Объединяющий блок 602 принимает синфазную (I) и квадратурную (Q) компоненты от блока 601 модуляционного генератора. Объединяющий блок 602 объединяет синфазную (I) и квадратурную (Q) компоненты и передает их на блоки 608 и 609 квадратурной демодуляции.
Блоки 604 и 605 действительных-комплексных преобразований формируют мнимые (то есть квадратурные) компоненты входных сигналов LPO и RPO. Результирующие синфазная (действительная) и квадратурная (мнимая) компоненты содержат синусоиды, включающие в себя как синусные, так и косинусные компоненты. Блоки 604 и 605 действительных-комплексных преобразований передают результирующие синфазные (действительные) и квадратурные (мнимые) компоненты обоих сигналов на соответствующие блоки 608 609 квадратурной демодуляции.
Блоки 608 и 609 квадратурной демодуляции демодулируют сигнал LPO и сигнал RPO, используя синусоиды. В результате демодуляции формируются первый демодулированный сигнал и второй демодулированный сигнал. Кроме того, в процессе демодуляции формируются компонент нулевой частоты и высокочастотный компонент для каждого из LPO и RPO. Высокочастотный компонент в дальнейшем удаляется (см. ниже). Выходные сигналы блоков 608 и 609 квадратурной демодуляции передаются, соответственно, на блоки 610 и 611 децимации.
Блоки 610 и 611 децимации могут прореживать сигналы квадратурной демодуляции LPO и RPO. Например, блоки 610 и 611 децимации могут прореживать эти два сигнала, например, с коэффициентом порядка 10. Кроме того, блоки 610 и 611 децимации могут выполнять любую желаемую фильтрацию демодулированных сигналов. Например, в одном варианте осуществления блоки 610 и 611 децимации могут содержать полифазный фильтр децимации, который используется для удаления гармонических составляющих (то есть высокочастотных компонент) из синфазных (I) и квадратурных (Q) компонент сигнала датчика, а также для децимации сигнала. Коэффициенты фильтра могут быть выбраны так, чтобы обеспечивать децимацию входящего сигнала, такого как децимация, например, с коэффициентом 10. Блоки 610 и 611 децимации передают демодулированный сигнал RPO на блок 612 комплексного сопряжения и передают демодулированный сигнал LPO на блок 614 корреляции.
Блок 612 сопряжения выполняет комплексное сопряжение демодулированного сигнала RPO. Блок 612 сопряжения передает сопряженный демодулированный сигнал RPO на блок 614 корреляции.
Блок 614 корреляции коррелирует демодулированные сигналы LPO и RPO. Операция сопряжения, сопровождаемая корреляцией, содержит операцию взаимной корреляции. Комплексная корреляция может содержать умножение, которое создает результат, показанный в уравнениях (17) и (18). В итоге, блок 614 корреляции формирует значение разности фаз (или фазовый угол). Определенная разность фаз может использоваться для определения различных характеристик потока. Благодаря двум отдельным процессам квадратурной демодуляции, показанным на фиг.6, фазоразностная часть 600 может также упоминаться как цепь квадратурной демодуляции.
На фиг.7 показана блок-схема 700 последовательности операций при выполнении способа квадратурной демодуляции разности фаз в соответствии с вариантом осуществления изобретения. На этапе 701 принимаются первый и второй сигналы датчика.
На этапе 702 фазовый сдвиг на 90 градусов создается для одного из двух сигналов датчика - первого или второго.
На этапе 703 частота (f) определяется из фазового сдвига на 90 градусов и соответствующего сигнала датчика. Частота (f) может быть представлена как круговая частота:

Определенная частота (f) может использоваться для определения характеристик потока. Определенная частота (f) может также использоваться для определения разности фаз между первым и вторым сигналами датчика, такого как использование способа цепи QD, описанного выше.
На этапе 704 создается опорный сигнал (WК). Опорный сигнал (WK) содержит синусный и косинусный сигналы. Опорные сигналы (WK) имеют ту же самую частоту, что и сигналы RPO и LPO. Круговая частота (используется модуляционным генератором, чтобы рекурсивно создавать синусоидальные опорные сигналы для демодуляции (WK), содержащие:

с помощью входных сигналов LPO и RPO, содержащих:


На этапе 705 сигнал датчика xLPO демодулируется с использованием опорных сигналов WK. Демодуляция содержит смешивание или перемножение сигнала датчика xLPO с опорными сигналами WK, чтобы создать демодулированный сигнал LPO.
На этапе 706 сигнал датчика xRPO демодулируется с помощью опорных сигналов WK. Демодуляция содержит смешивание или перемножение сигнала датчика xRPO с опорными сигналами WK, чтобы создать демодулированный сигнал RPO.
В результате, демодулированные сигналы на выходе блоков 608 и 609 квадратурной демодуляции содержат:


которые могут быть переписаны следующим образом:


На этапе 707 демодулированные сигналы фильтруются, чтобы удалить высокочастотные члены. Эти высокочастотные члены, возникшие в результате квадратурной демодуляции, содержат члены [exp(-j(2ωk+ϕLPO/RPO))] в приведенных выше уравнениях (13) и (14). Для удаления высокочастотных членов может использоваться фильтр нижних частот. В одном варианте осуществления фильтр может содержать двойной каскад фильтров децимации (I, Q) c коэффициентом децимации на 40. Выходной сигнал при такой фильтрации представляется следующим образом:


На этапе 708 один из демодулированных сигналов (такой как демодулированный сигнал RPO на фиг.6) сопрягается. Операция сопряжения формирует отрицательную величину мнимого сигнала.
На этапе 709 выходные сигналы фильтров коррелируются с помощью каскада комплексной корреляции. Этапы сопряжения и корреляции операции комплексной корреляции дают в результате:

где второй член z представляет комплексное сопряжение после этапа 708. Из уравнения (16) следует, что выходной сигнал корреляции/перемножения содержит:

Следовательно, фазовый угол содержит:

Разность фаз, следовательно, является выходным сигналом.
Измерительное электронное устройство и способ определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера согласно изобретению могут быть осуществлены в соответствии с любым из вариантов осуществления, чтобы получить несколько преимуществ, если это желательно. С помощью изобретения может вычисляться разность фаз по определенной частоте и первому и второму сигналам датчика. Изобретение может обеспечить определение разности фаз с большей точностью и надежностью. Изобретение может обеспечить определение разности фаз быстрее, чем в предшествующем уровне техники, в то же время требуя для этого меньшей затраты времени.




Изобретение может быть использовано при измерении параметров (расхода, плотности) материала, текущего по трубопроводу. Электронное измерительное устройство (20) расходомера Кориолиса содержит интерфейс (201) для приема первого сигнала датчика и второго сигнала датчика и систему (203) обработки, соединенную с интерфейсом (201) с возможностью приема первого сигнала датчика и второго сигнала датчика, формирования фазового сдвига на девяносто градусов из первого сигнала датчика и вычисления частоты на основе первого сигнала датчика и фазового сдвига на девяносто градусов. Система (203) дополнительно выполнена с возможностью формирования синусного и косинусного сигналов, используя частоту, квадратурной демодуляции первого сигнала датчика и второго сигнала датчика, используя синусный и косинусный сигналы, для определения разности фаз. Изобретение обеспечивает повышение точности измерения двухфазных потоков жидкости с твердыми включениями или воздушными пузырьками. 3 н. и 8 з.п. ф-лы, 7 ил.
1. Электронное измерительное устройство (20) для определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера, содержащее
интерфейс (201) для приема первого сигнала датчика и второго сигнала датчика; и
систему (203) обработки, связанную с интерфейсом (201) и выполненную с возможностью приема первого сигнала датчика и второго сигнала датчика, формирования фазового сдвига на девяносто градусов относительно первого сигнала датчика, вычисления частоты на основе первого сигнала датчика и фазового сдвига на девяносто градусов, формирования синусного и косинусного сигналов, используя частоту, и квадратурной демодуляции первого сигнала датчика и второго сигнала датчика, используя синусный и косинусный сигналы, чтобы определить разность фаз.
2. Электронное измерительное устройство (20) по п.1, отличающееся тем, что система (203) обработки дополнительно выполнена с возможностью вычисления одного или более параметров из группы, состоящей из массового расхода, плотности или объемного расхода, используя одно или более значений частоты и разности фаз.
3. Электронное измерительное устройство (20) по п.1, отличающееся тем, что система (203) обработки дополнительно выполнена с возможностью вычисления фазового сдвига на девяносто градусов, используя преобразование Гильберта.
4. Электронное измерительное устройство по п.1, отличающееся тем, что при квадратурной демодуляции создается первый демодулированный сигнал и второй демодулированный сигнал, при этом система (203) обработки дополнительно выполнена с возможностью фильтрации первого демодулированного сигнала и второго демодулированного сигнала для удаления высокочастотных компонент и взаимной корреляции первого демодулированного сигнала и второго демодулированного сигнала, чтобы определить разность фаз.
5. Способ определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера, заключающийся в том, что
принимают первый сигнал датчика и второй сигнал датчика;
формируют фазовый сдвиг на девяносто градусов относительно первого сигнала датчика,
вычисляют частоту на основе первого сигнала датчика и фазового сдвига на девяносто градусов,
формируют синусный и косинусный сигналы, используя частоту,
квадратурно демодулируют первый сигнал датчика и второй сигнал датчика, используя синусный и косинусный сигналы для определения разности фаз.
6. Способ по п.5, отличающийся тем, что дополнительно вычисляют один или более параметров из группы, состоящей из массового расхода плотности или объемного расхода, используя одно или более значений частоты и разности фаз.
7. Способ по п.5, отличающийся тем, что дополнительно вычисляют фазовый сдвиг на девяносто градусов, используя преобразование Гильберта.
8. Способ по п.5, отличающийся тем, что осуществляют квадратурную демодуляцию, при которой формируют первый демодулированный сигнал и второй демодулированный сигнал, и, дополнительно содержащий этапы, на которых фильтруют первый демодулированный сигнал и второй демодулированный сигнал, чтобы удалить высокочастотные компоненты, и
взаимно коррелируют первый демодулированный сигнал и второй демодулированный сигнал, чтобы получить разность фаз.
9. Способ определения разности фаз между первым сигналом датчика и вторым сигналом датчика расходомера, заключающийся в том, что
принимают первый сигнал датчика и второй сигнал датчика,
формируют фазовый сдвиг на девяносто градусов относительно первого сигнала датчика,
вычисляют частоту на основе первого сигнала датчика и фазового сдвига на девяносто градусов,
формируют синусный и косинусный сигналы, используя частоту,
осуществляют квадратурную демодуляцию первого сигнала датчика и второго сигнала датчика, формируя при квадратурной демодуляции первый демодулированный сигнал и второй демодулированный сигнал,
фильтруют первый демодулированный сигнал и второй демодулированный сигнал, чтобы удалить высокочастотные компоненты, и
взаимно коррелируют первый демодулированный сигнал и второй демодулированный сигнал, чтобы получить разность фаз.
10. Способ по п.9, отличающийся тем, что дополнительно вычисляют один или более параметров из группы, состоящей из массового расхода, плотности или объемного расхода, используя одно или более значений частоты и разности фаз.
11. Способ по п.9, отличающийся тем, что дополнительно вычисляют фазовый сдвиг на девяносто градусов, используя преобразование Гильберта.
| WO 00/34748 A2, 15.06.2000 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА МАТЕРИАЛА В МАССОВОМ РАСХОДОМЕРЕ КОРИОЛИСА | 1996 |
|
RU2155325C2 |
| МНОГОЧАСТОТНЫЙ ПРОЦЕССОР ЦИФРОВЫХ СИГНАЛОВ ДЛЯ ОБРАБОТКИ СИГНАЛОВ ДАТЧИКОВ, УСТАНАВЛИВАЕМЫХ НА ВИБРИРУЮЩИХ ТРУБКАХ | 2000 |
|
RU2234683C2 |
| US 6505519 B2, 14.01.2003. | |||

