Область техники, к которой относится изобретение
Настоящее изобретение относится к электронному измерительному оборудованию и способам обработки одного или более сигналов датчиков в расходомере.
Уровень техники
Массовые расходомеры Кориолиса широко используются для измерения массового расхода плотности и объемного расхода, а также другой информации по веществам, протекающим через трубопровод, как раскрыто в патенте (США) US 4491025 1985 г., и №31450 1982 г. Эти расходомеры имеют одну или более расходомерных трубок различных конфигураций. Каждая конфигурация трубопровода может рассматриваться как имеющая набор мод собственных колебаний, в том числе, но не только, плоский изгиб, крутильную, радиальную и связанную моду. В типичном варианте применения измерения массового расхода методом Кориолиса конфигурация трубопровода возбуждается в одной или более колебательных мод по мере того, как вещество протекает через трубопровод, и движение в трубопроводе измеряется в точках, разнесенных по трубопроводу.
Колебательные моды заполненных веществами систем частично задаются посредством объединенной массы расходомерных трубок и вещества внутри расходомерных трубок. Вещество протекает в расходомер из присоединенного трубопровода на входной стороне расходомера. Затем вещество направляется через расходомерную трубку или расходомерные трубки и выходит из расходомера в трубопровод, соединенный с трубкой на выходной стороне.
Приводной механизм применяет силу к расходомерной трубке. Сила вызывает колебания расходомерной трубки. Когда нет вещества, протекающего через расходомер, все точки вдоль расходомерной трубки колеблются с идентичной фазой. По мере того как вещество начинает протекать через расходомерную трубку, ускорения Кориолиса приводят к тому, что каждая точка вдоль расходомерной трубки имеет различную фазу относительно других точек вдоль расходомерной трубки. Фаза на входной стороне расходомерной трубки запаздывает от приводного механизма, тогда как фаза на выходной стороне опережает приводной механизм. Датчики помещаются в различных точках на расходомерной трубке, чтобы формировать синусоидальные сигналы, представляющие движение расходомерной трубки в различных точках. Разность фаз между двумя сигналами датчика пропорциональна удельному массовому расходу вещества, протекающего через расходомерную трубку или расходомерные трубки. В предшествующем уровне техники используется дискретное преобразование Фурье (DFT) или быстрое преобразование Фурье (FFT), чтобы определять разность фаз между сигналами датчиков. Разность фаз и частотная характеристики колебаний блока расходомерных трубок используются для того, чтобы получить удельный массовый расход.
В одном способе предшествующего уровня техники независимый опорный сигнал используется для того, чтобы определять частоту сигнала датчика, например, посредством использования частоты, отправляемой в систему колебательного приводного механизма. В другом известном способе частотная характеристика колебаний, формируемая посредством чувствительного элемента датчика, может быть определена посредством центрирования до этой частоты в режекторном фильтре, при этом известные расходомеры пытаются поддерживать режекцию режекторного фильтра на частоте чувствительного элемента датчика. Эта методика предшествующего уровня техники работает достаточно хорошо в режиме покоя, где расходуемое вещество в расходомере является однородным и где результирующая частота сигнала датчика достаточно стабильна. Тем не менее, измерение фазы в предшествующем уровне техники является неточным, когда расходуемое вещество является неоднородным, например, в двухфазных потоках, где расходуемое вещество содержит жидкость и твердое вещество или имеются пузырьки воздуха в жидком расходуемом веществе. В этих ситуациях определенная по предшествующему уровню техники частота может быстро изменяться. При режимах быстрых и существенных трансформаций частоты сигналы датчика могут выходить за пределы полосы пропускания фильтра, давая некорректные измерения фазы и частоты. Это также является проблемой при группировании "пустой - полный - пустой", где расходомер управляется многократно в чередующихся режимах "пустой" и "полный". Помимо этого, если частота датчика изменяется быстро, процесс демодуляции не может соответствовать фактической или измеренной частоте, вызывая демодуляцию на некорректной частоте. Следует понимать, что если определенная частота является некорректной или неточной, то извлекаемые в дальнейшем значения плотности, удельного объемного расхода и т.д. также являются некорректными и неточными. Более того, ошибка может возникать в последующих определениях характеристик расхода.
В предшествующем уровне техники сигналы датчика могут быть оцифрованы и обработаны в цифровой форме, чтобы реализовать режекторный фильтр. Режекторный фильтр допускает только узкую полосу частот. Следовательно, когда целевая частота изменяется, режекторный фильтр не может отслеживать целевой сигнал в течение определенного периода времени. Обычно цифровая реализация режекторного фильтра требует 1-2 секунды, чтобы отследить изменяющийся целевой сигнал. Вследствие времени, требуемого для определения частоты, результат заключается не только в том, что при определении частоты и фазы возникают ошибки, но также в том, что погрешность измерения включает временной интервал, который превышает временной интервал, в течение которого фактически возникает ошибка и/или двухфазный поток. Это обусловлено относительно медленным откликом режекторного фильтра.
Результатом является то, что известный расходомер не может точно, быстро или удовлетворительно отслеживать или определять частоту чувствительного элемента датчика в ходе двухфазного потока расходуемого вещества в расходомере. Как следствие, определение фазы также является медленным и подвержено ошибкам, поскольку разность фаза определяется с помощью определенной частоты датчика. Следовательно, любая ошибка в определении частоты накапливается при определении фазы. Результатом является увеличение ошибки при определении частоты и определении фазы, приводящее к увеличению ошибки при определении удельного массового расхода. Кроме этого, поскольку определенное значение частоты используется для того, чтобы определять значение плотности (плотность приблизительно равна частоте, возведенной в квадрат), ошибка при определении частоты повторяется или накапливается при определении плотности. Это также справедливо для определения удельного объемного расхода, где удельный объемный расход равен удельному массовому расходу, поделенному на плотность.
Электронное измерительное оборудование раскрыто в патенте US 5578764. В патенте раскрыт преобразователь 21 Гилберта и вычислитель 31 тригонометрической функции, чтобы принимать сигналы от чувствительных элементов датчиков, расположенных выше по течению и ниже по течению, и использовать оба сигнала для того, чтобы вычислять разность фаз между сигналами. Преобразователь 21 Гилберта сдвигает по фазе оба сигнала чувствительного элемента датчика на 90 градусов и оба сигнала со сдвигом по фазе используются в вычислении разности фаз. Полученная таким образом разность фаз используется для того, чтобы вычислять удельный массовый расход наряду с независимо измеренной внешней частотой. Указанное устройство, таким образом, не позволяет быстро и точно определять частотный компонент, требуемый для того, чтобы точно вычислять удельный массовый расход. Помимо этого, устройство не может быстро формировать удельный массовый расход, поскольку следует дожидаться определения частоты.
Сущность изобретения
Вышеуказанные и другие проблемы решены в заявленном устройстве посредством создания электронного измерительного оборудования и способов обработки сигналов датчиков в расходомере.
Электронное измерительное оборудование для обработки сигналов датчиков в расходомере согласно изобретению содержит интерфейс для приема первого сигнала датчика и второго сигнала датчика и систему обработки, связанную с интерфейсом и сконфигурированную для того, чтобы формировать сдвиг фаз на 90 градусов из первого сигнала датчика и вычислять разность фаз с помощью указанного сдвига фаз. Электронное измерительное оборудование для обработки сигналов датчиков в расходомере согласно изобретению содержит интерфейс для приема первого сигнала датчика и второго сигнала датчика и систему обработки, связанную с интерфейсом и сконфигурированную для того, чтобы формировать сдвиг фаз на 90 градусов из первого сигнала датчика и вычислять разность фаз с помощью указанного сдвига фаз.
Электронное измерительное оборудование для обработки сигналов датчиков в расходомере согласно варианту осуществления изобретения содержит интерфейс для приема первого сигнала датчика и второго сигнала датчика и систему обработки, связанную с интерфейсом и сконфигурированную для того, чтобы формировать сдвиг фаз на 90 градусов из первого сигнала датчика и вычислять частоту с помощью указанного сдвига фаз.
Согласно варианту осуществления изобретения предложен способ обработки сигналов датчиков в расходомере. Способ содержит этапы, на которых принимают первый сигнал датчика и второй сигнал датчика, формируют сдвиг фаз на 90 градусов из первого сигнала датчика и вычисляют разность фаз с помощью указанного сдвига фаз.
Согласно варианту осуществления изобретения предложен способ обработки сигналов датчиков в расходомере. Способ содержит этапы, на которых принимают первый сигнал датчика и второй сигнал датчика, формируют сдвиг фаз на 90 градусов из первого сигнала датчика и вычисляют частоту с помощью указанного сдвига фаз.
Согласно варианту осуществления изобретения предложен способ обработки сигналов датчиков в расходомере. Способ содержит этапы, на которых принимают первый сигнал датчика и второй сигнал датчика, формируют сдвиг фаз на 90 градусов из первого сигнала датчика, вычисляют разность фаз с помощью указанного сдвига фаз и вычисляют частоту с помощью указанного сдвига фаз.
Согласно варианту осуществления изобретения предложен способ обработки сигналов датчиков в расходомере. Способ содержит этапы, на которых принимают первый сигнал датчика и второй сигнал датчика, формируют сдвиг фаз на 90 градусов из первого сигнала датчика, вычисляют разность фаз с помощью указанного сдвига фаз, вычисляют частоту с помощью указанного сдвига фаз и вычисляют одно или более параметров из группы, состоящей из удельного массового расхода, плотности или удельного объемного расхода.
Согласно варианту осуществления изобретения предложен способ обработки сигналов датчиков в расходомере. Способ содержит этапы, на которых принимают первый сигнал датчика и второй сигнал датчика, формируют первый сдвиг фаз на 90 градусов из первого сигнала датчика и формируют второй сдвиг фаз на 90 градусов из второго сигнала датчика и вычисляют частоту с помощью одного из первого девяностоградусного сдвига фаз и второго сдвига фаз.
Согласно варианту осуществления изобретения предложен способ обработки сигналов датчиков в расходомере. Способ содержит этапы, на которых принимают первый сигнал датчика и второй сигнал датчика, формируют первый сдвиг фаз на 90 градусов из первого сигнала датчика и формируют второй сдвиг фаз на 90 градусов из второго сигнала датчика, вычисляют частоту с помощью одного из первого сдвига фаз и второго сдвига фаз и вычисляют один или более параметров из группы, состоящей из удельного массового расхода, плотности или удельного объемного расхода.
Согласно варианту осуществления изобретения предложен способ обработки сигналов датчиков в расходомере. Способ содержит этапы, на которых принимают первый сигнал датчика и второй сигнал датчика, формируют первый сдвиг фаз на 90 градусов из первого сигнала датчика и формируют второй сдвиг фаз на 90 градусов из второго сигнала датчика, вычисляют частоту с помощью одного из первого девяностоградусного сдвига фаз и второго сдвига фаз, вычисляют разность фаз с помощью первого указанного сдвига фаз и второго указанного сдвига фаз и вычисляют один или более параметров из группы, состоящей из удельного массового расхода, плотности или удельного объемного расхода.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов его воплощения со ссылками на сопровождающие чертежи, на которых:
Фиг.1 изображает расходомер Кориолиса согласно изобретению;
Фиг.2 - схему электронного измерительного оборудования согласно изобретению;
Фиг.3 - блок-схему последовательности операций способа обработки сигнала датчика в расходомере согласно изобретению;
Фиг.4 - схему электронного измерительного оборудования согласно изобретению;
Фиг.5 - блок-схему последовательности операций способа обработки сигнала первого и второго датчиков в расходомере согласно изобретению;
Фиг.6 - блок-схему части системы обработки согласно изобретению;
Фиг.7 - блок преобразования Гилберта согласно изобретению.
Фиг.8 и 9 - блок-схемы двух независимых веток блока анализа согласно изобретению;
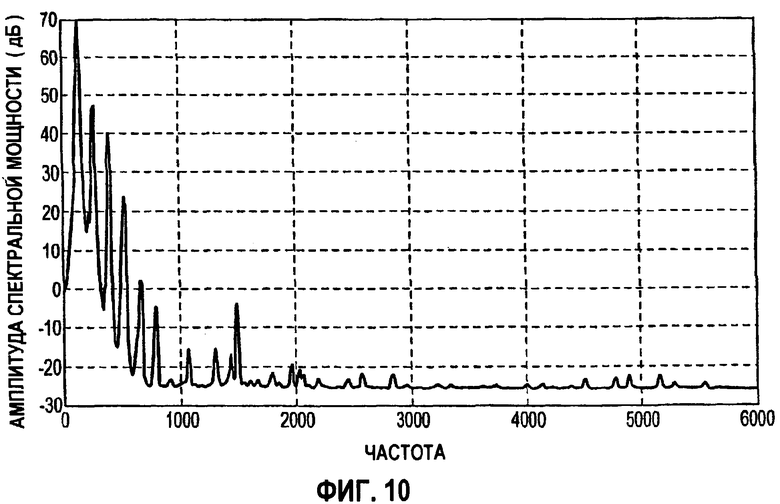
Фиг.10 - диаграмму спектральной плотности мощности сигнала чувствительного элемента датчика расходомера при обычных условиях согласно изобретению;
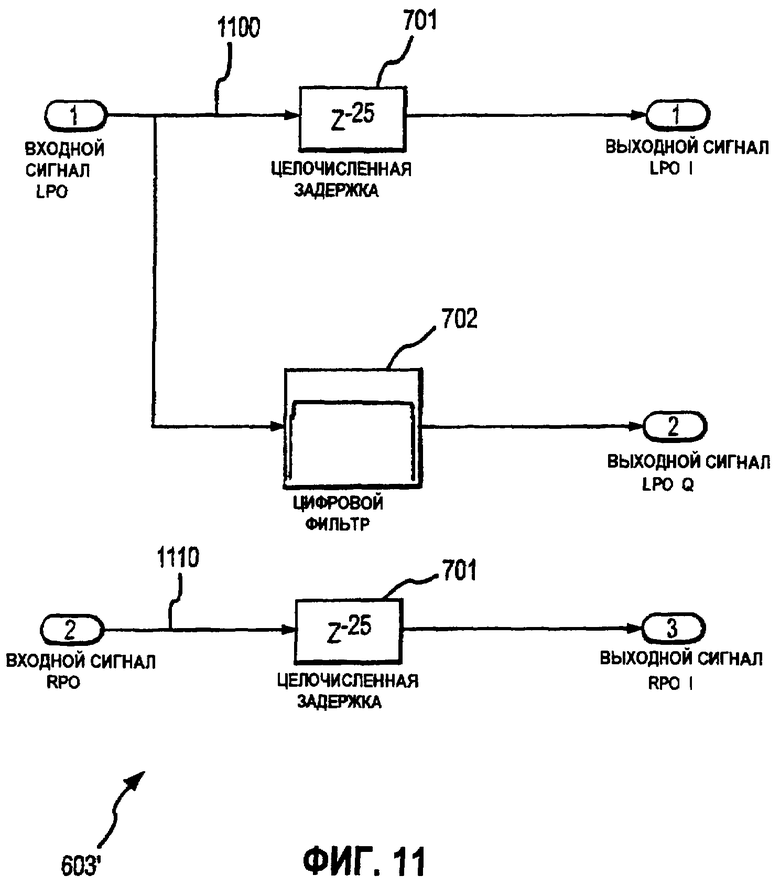
Фиг.11 - блок преобразования Гилберта с одним сдвигом фаз согласно изобретению;
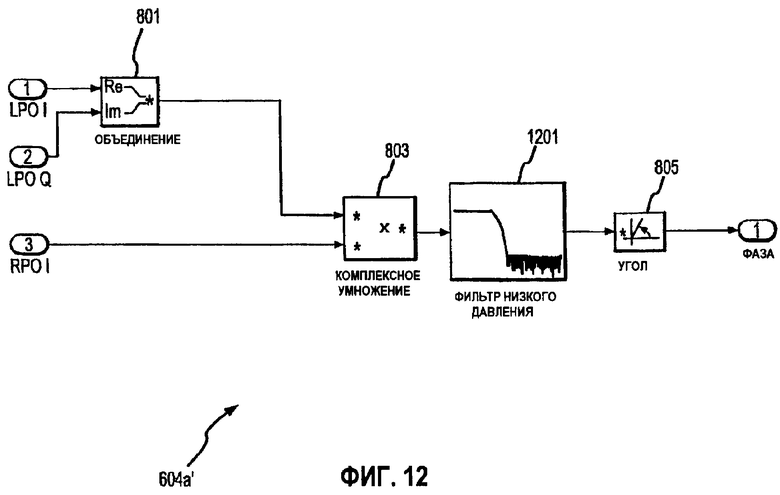
Фиг.12 - блок анализа с одним сдвигом фаз согласно изобретению;
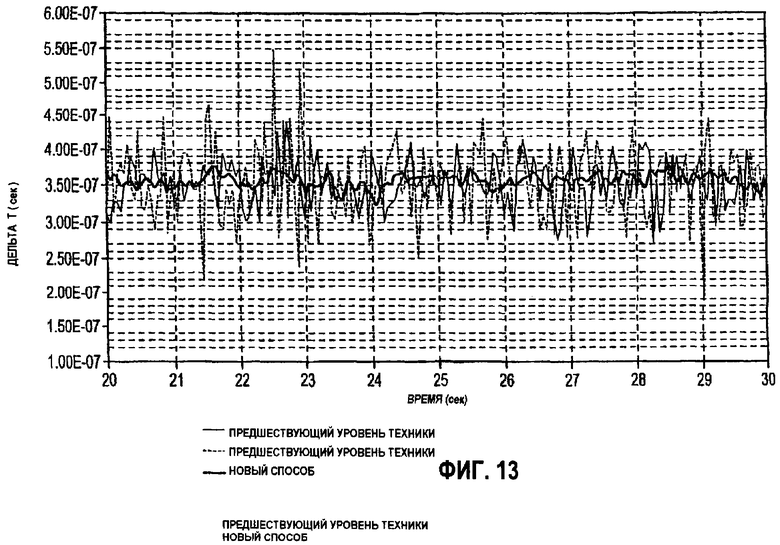
Фиг.13 - диаграмму обработки в датчике согласно изобретению по сравнению с предшествующим уровнем техники, где сравнивается значение разности времен (Δt) для каждого элемента.
Подробное описание предпочтительных вариантов воплощения изобретения
Для описания принципов изобретения некоторые традиционные аспекты упрощены или опущены. Специалисты в данной области техники должны принимать во внимание отклонения от этих примеров, которые подпадают в область применения изобретения. Признаки, описанные ниже, могут объединяться различными способами, чтобы формировать несколько вариантов изобретения, поэтому изобретение не ограничено конкретными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
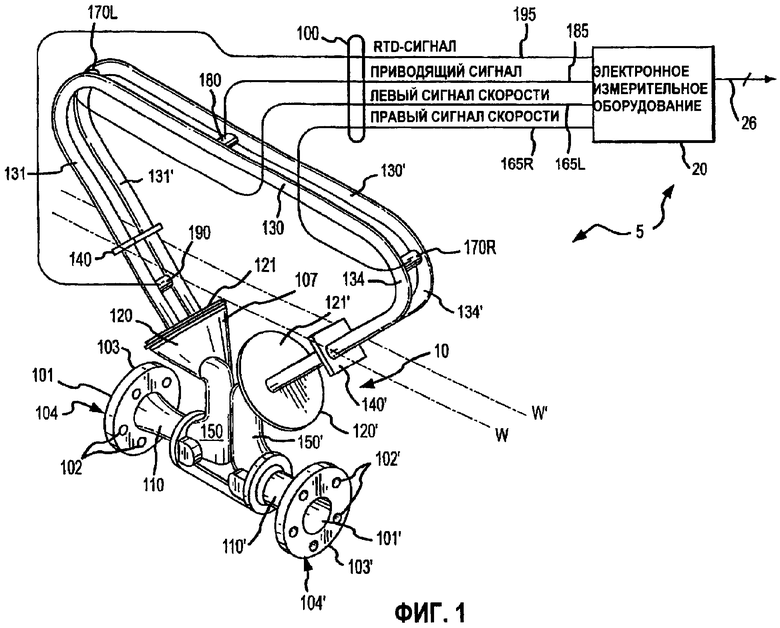
На Фиг.1 представлен расходомер 5 Кориолиса, содержащий блок 10 измерителя и электронное измерительное оборудование 20. Блок 10 измерителя реагирует на удельный массовый расход и плотность технологического вещества. Электронное измерительное оборудование 20 соединено с блоком 10 измерителя посредством провода 100, чтобы предоставлять информацию плотности, удельного массового расхода и температуры по каналу 26, а также другую информацию, незначимую для настоящего изобретения. Структура расходомера Кориолиса описана, хотя специалистам в данной области техники должно быть очевидно, что настоящее изобретение может быть использовано на практике в качестве вибрационного трубчатого денситометра без дополнительных измерительных возможностей, предоставляемых посредством массового расходомера Кориолиса.
Блок 10 измерителя содержит пару трубопроводов 150 и 150', фланцы 103 и 103', имеющие шейки 110 и 110' фланцев, пару параллельных расходомерных трубок 130 и 130', приводной механизм 180, датчик 190 температуры и пару датчиков 170L и 170R скорости. Трубки 130 и 130' имеют две практически прямые входные ножки 131 и 131' и выходные ножки 134 и 134', которые сходятся в направлении друг к другу в монтажных стойках 120 и 120' расходомерных трубок. Трубки 130 и 130' изгибаются в двух симметричных позициях вдоль своей длины и являются практически параллельными по длине. Соединительные брусы 140 и 140' служат для задания оси W и W', выше которой колеблется каждая трубка.
Боковые опоры 131, 131' и 134, 134' трубок 130 и 130' крепятся к монтажным стойкам 120 и 120' расходомерных трубок, а стойки, в свою очередь, крепятся к трубопроводам 150 и 150'. Это обеспечивает непрерывный закрытый канал для вещества через блок 10 измерителя Кориолиса.
Когда фланцы 103 и 103', имеющие отверстия 102 и 102', соединяются посредством входного конца 104 и выходного конца 104' с технологической линией (не показана), которая переносит технологическое вещество, которое изменяется, вещество входит с конца 104 измерителя через проход 101 во фланце 103, проводится через трубопровод 150 в монтажную стойку 120 расходомерной трубки, имеющую поверхность 121. В трубопроводе 150 вещество разделяется и направляется через трубки 130 и 130'. После выхода из трубок 130 и 130' технологическое вещество объединяется в один поток в трубопроводе 150' и далее направляется в выходной конец 104', соединенный посредством фланца 103', имеющего болтовые отверстия 102', с технологической линией (не показана).
Трубки 130 и 130' выбираются и соответствующим образом устанавливаются на монтажные опоры 120 и 120' расходомерных трубок, так чтобы иметь практически одинаковое распределение масс, моменты инерции и модуль Юнга вокруг осей изгиба W--W и W'--W' соответственно. Оси изгиба проходят через соединительные брусы 140 и 140'. Ввиду того, что модуль Юнга расходомерных трубок изменяется с температурой и это изменение влияет на вычисление расхода и плотности, термодетектор сопротивления (RTD) 190 крепится к трубке 130', чтобы постоянно измерять температуру расходомерной трубки. Температура расходомерной трубки, а следовательно, и напряжение, возникающее в RTD для данного тока, проходящего через него, определяется температурой вещества, проходящего через расходомерную трубку. Зависимое от температуры напряжение, возникающее в RTD, используется в электронном измерительном оборудовании 20, чтобы корректировать изменение модуля упругости трубок 130 и 130' вследствие любых изменений температуры расходомерной трубки. RTD соединен с электронным измерительным оборудованием 20 посредством провода 195.
Обе трубки 130 и 130' активируется посредством приводного механизма 180 в противоположных направлениях вокруг своих осей изгиба W и W', что обозначается как первый сдвиг по фазе изгибной моды расходомера. Приводной механизм 180 может иметь любую из множества известных компоновок, например магнит, установленный на трубке 130', и размещенная напротив катушка, установленная на трубке 130, через которую проходит переменный ток, для колебания обоих расходомерных трубок. Надлежащий приводящий сигнал подается электронным измерительным оборудованием 20 посредством провода 185 к приводному механизму 180.
Электронное измерительное оборудование 20 принимает сигнал температуры RTD по проводу 195, а также левые и правые сигналы скорости, появляющиеся в проводах 165L и 165R соответственно. Электронное измерительное оборудование 20 формирует активирующий сигнал, возникающий в проводе 185, чтобы активировать элемент 180 и вызывать колебания трубок 130 и 130'. Электронное измерительное оборудование 20 обрабатывает левый и правый сигналы скорости и RTD-сигнал, чтобы вычислить удельный массовый расход и плотность вещества, проходящего через блок 10 измерителя. Эта информация наряду с другой информацией подается посредством электронного измерительного оборудования 20 по каналу 26 к средству 29 использования.
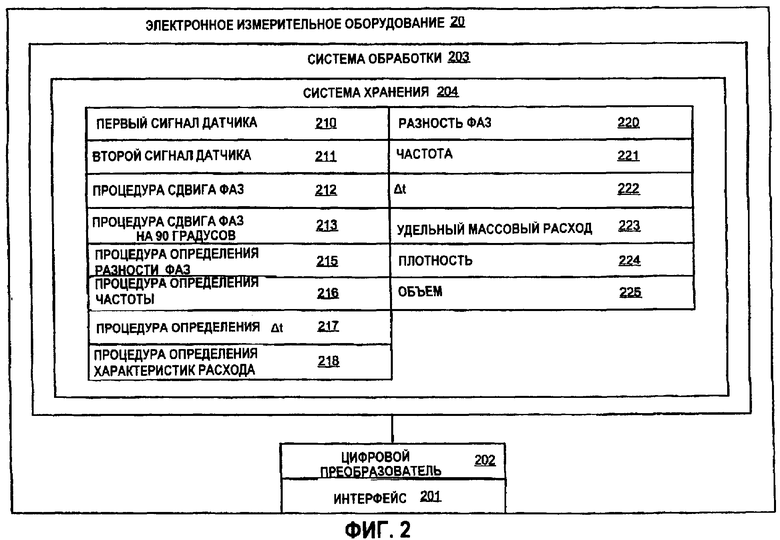
На Фиг.2 представлена схема электронного измерительного оборудования 20 согласно варианту осуществления изобретения. Электронное измерительное оборудование 20 может включать в себя интерфейс 201 и систему 203 обработки. Электронное измерительное оборудование 20 принимает сигналы первого и второго датчиков от блока 10 измерителя, такие как сигналы скорости. Электронное измерительное оборудование 20 может работать как массовый расходомер или может работать как денситометр, включая и работу в качестве массового расходомера Кориолиса. Электронное измерительное оборудование 20 обрабатывает сигналы первого и второго датчиков, чтобы получить характеристики расхода расходуемого вещества, протекающего через блок 10 измерителя. Например, электронное измерительное оборудование 20 может определять один параметр или более из группы, состоящей из разности фаз, частоты, разности времен (Δt), плотности, удельного массового расхода и удельного объемного расхода из сигналов датчиков. Кроме того, могут быть определены другие характеристики расхода согласно изобретению.
Определение разности фаз и определение частоты выполняется гораздо быстрее, точнее и надежнее, чем в предшествующем уровне техники. В одном варианте определение разности фаз и определение частоты непосредственно осуществляется из сдвига фаз только одного сигнала датчика без необходимости опорного сигнала частоты. Это выгодно уменьшает время обработки, требуемое для того, чтобы вычислять характеристики расхода. В другом варианте осуществления разность фаз определяется из сдвигов фаз сигналов обоих датчиков, тогда как частота определяется только из одного сигнала сдвига фаз. Это повышает точность обеих характеристик расхода и они обе могут быть определены быстрее, чем в предшествующем уровне техники.
Способы определения частоты предшествующего уровня техники обычно требуют для выполнения 1-2 с. В отличие от этого определение частоты согласно изобретению может выполняться самое малое за 50 миллисекунд (мс). Предполагается даже более быстрое определение частоты в зависимости от типа и конфигурации системы обработки, частоты дискретизации колебательной характеристики, размеров фильтров, частот прореживания и т.д. При скорости определения частоты в 50 мс электронное измерительное оборудование 20 согласно изобретению может быть примерно в 40 раз быстрее, чем в предшествующем уровне техники.
Интерфейс 201 принимает сигнал от одного из датчиков 170L и 170R скорости посредством проводов 100 (фиг.1). Интерфейс 201 может выполнять все необходимое или требуемое формирование сигнала, например, любой способ форматирования, усиления, буферизации и т.д. Альтернативно, часть или все формирование сигнала может выполняться в системе 203 обработки.
Кроме этого, интерфейс 201 может обеспечивать связь между электронным измерительным оборудованием 20 и внешними устройствами. Интерфейс 201 может допускать любой способ электронной, оптической или беспроводной связи.
Интерфейс 201 в одном варианте осуществления соединен с цифровым преобразователем 202, в котором сигнал датчика содержит аналоговый сигнал датчика. Цифровой преобразователь 202 дискретизирует и оцифровывает аналоговый сигнал датчика и формирует цифровой сигнал датчика. Цифровой преобразователь 202 также может выполнять все требуемое прореживание, при котором цифровой сигнал датчика прореживается, чтобы уменьшить объем требуемой обработки сигнала и снизить время обработки. Прореживание подробнее описывается ниже.
Система 203 обработки осуществляет операции электронного измерительного оборудования 20 и обрабатывает измерения расхода из блока 10 расходомера. Система 203 обработки приводит в исполнение одну или более процедур обработки и тем самым обрабатывает измерения расхода, чтобы формировать одну или более характеристик расхода.
Система 203 обработки может содержать вычислительную машину общего назначения, микропроцессорную систему, логическую схему или какое-либо другое универсальное или специализированное устройство обработки. Система 203 обработки может распределяться по нескольким устройствам обработки. Система 203 обработки может включать в себя любой способ интегрированного или независимого электронного носителя хранения, такого как система 204 хранения.
Система 203 обработки обрабатывает сигнал 210 датчика, чтобы определить одну или более характеристик расхода от сигнала 210 датчика. Одна или более характеристик расхода может включать в себя разность фаз, частоту, разность времен (Δt), удельный массовый расход и/или плотность расходуемого вещества, к примеру.
В описываемом варианте осуществления система 203 обработки определяет характеристики расхода из двух сигналов 210 и 211 датчиков и сдвига 213 фаз одного сигнала датчика. Система 203 обработки может определять, по меньшей мере, разность фаз и частоту из двух сигналов 210 и 211 датчиков и одного сдвига 213 фаз. Как результат первый или второй сдвинутый по фазе сигнал датчика (такой как один из сигналов датчиков, расположенных выше по потоку и ниже по потоку) может быть обработан посредством системы 203 обработки согласно изобретению, чтобы определить разность фаз, частоту, разность времен (Δt) и/или удельный массовый расход для расходуемого вещества.
Система 204 хранения может сохранять параметры и данные расходомера, программные процедуры, постоянные значения и переменные значения. В одном варианте осуществления система 204 хранения включает в себя процедуры, которые приводятся в исполнение посредством системы 203 обработки. В одном варианте осуществления система 204 хранения сохраняет процедуру 212 сдвига фаз, процедуру 215 разности фаз, процедуру 216 частоты, процедуру 217 разности времен (Δt) и процедуру 218 характеристик расхода.
В одном варианте осуществления система 204 хранения сохраняет переменные, используемые для того, чтобы управлять расходомером 5 Кориолиса. Система 204 хранения в одном варианте осуществления сохраняет переменные, такие как первый сигнал 210 датчика и второй сигнал 211 датчика, которые принимаются от чувствительных элементов 170L и 170R датчиков скорости. Помимо этого система 204 хранения может сохранять сдвиг 213 фаз на 90 градусов, который формируется для того, чтобы определять характеристики расхода.
В одном варианте осуществления система 204 хранения сохраняет одну или более характеристик потока, полученные из измерений потока. Система 204 хранения в одном варианте осуществления сохраняет характеристики потока, такие как разность 220 фаз, частоту 221, разность 222 времен (Δt), удельный массовый расход 223, плотность 224 и удельный объемный расход 225, все из которых определяются из сигнала 210 датчика.
Процедура 212 сдвига фаз выполняет сдвиг фаз на 90 градусов для входного сигнала, т.е. сигнала 210 датчика. Процедура 212 сдвига фаз в одном варианте осуществления реализует преобразование Гилберта (описано ниже).
Процедура 215 разности фаз определяет разность фаз с помощью одного сдвига 213 фаз на 90 градусов. Дополнительная информация также может быть использована для того, чтобы вычислять разность фаз. Разность фаз в одном варианте осуществления вычисляется из сигнала 210 первого датчика, сигнала 211 второго датчика и сдвига 213 фаз на 90 градусов. Определенная разность фаз может быть сохранена в разности 220 фаз системы 204 хранения. Разность фаз, когда определена из сдвига 213 фаз на 90 градусов, может быть вычислена и получена гораздо быстрее, чем в предшествующем уровне техники. Это позволяет обеспечить критичную разность в вариантах применения расходомеров, имеющих высокий удельный расход, или где возникают многофазные потоки. Кроме этого, разность фаз может быть определена независимо от частоты любого сигнала 210 или 211 датчика. Более того, поскольку разность фаз определяется независимо от частоты, компонент ошибки в разности фаз не включает в себя компонент ошибки определения частоты, т.е. нет накапливающейся ошибки при измерении разности фаз. Следовательно, ошибка разности фаз уменьшается по сравнению с разностью фаз в предшествующем уровне техники.
Процедура 216 определения частоты определяет частоту (например, представленную сигналом 210 первого датчика или сигналом 211 второго датчика) из сдвига 213 фаз на 90 градусов. Определенная частота может быть сохранена в частоте 221 системы 204 хранения. Частота, когда определена из одного сдвига 213 фаз, может быть вычислена и получена гораздо быстрее, чем в предшествующем уровне техники. Это позволяет обеспечить критичную разность в вариантах применения расходомеров, имеющих высокий удельный расход, или где возникают многофазные потоки.
Процедура 217 определения разности времен (Δt) определяет разность времен (Δt) между сигналом 210 первого датчика и сигналом 211 второго датчика. Разность времен (Δt) может быть сохранена в разности времен (Δt) 222 системы 204 хранения. Разность времен (Δt) содержит практически определенную фазу, поделенную на определенную частоту, и, следовательно, используется для того, чтобы определять удельный массовый расход.
Процедура 218 определения характеристик расхода может определять одну или более характеристик расхода. Процедура 218 определения характеристик расхода может использовать определенную разность 220 фаз и определенную частоту 221, например, чтобы определять эти дополнительные характеристики расхода. Следует понимать, что дополнительная информация может потребоваться для этих определений, например удельный массовый расход или плотность. Процедура 218 вычисления характеристик расхода может определять удельный массовый расход из разности времен (Δt) 222 и, следовательно, из разности 220 фаз и частоты 221. Формула для определения удельного массового расхода известна и приводится в патенте US 5027662. Удельный массовый расход связан с массовым расходом расходуемого вещества в блоке 10 измерителя. Аналогично процедура 218 характеристик расхода также может определять плотность 224 и/или удельный объемный расход 225. Определенный удельный массовый расход, плотность и удельный объемный расход могут быть сохранены в удельном массовом расходе 223, плотности 224 и объеме 225 системы 204 хранения соответственно. Характеристики расхода могут передаваться во внешние устройства посредством электронного измерительного оборудования 20.
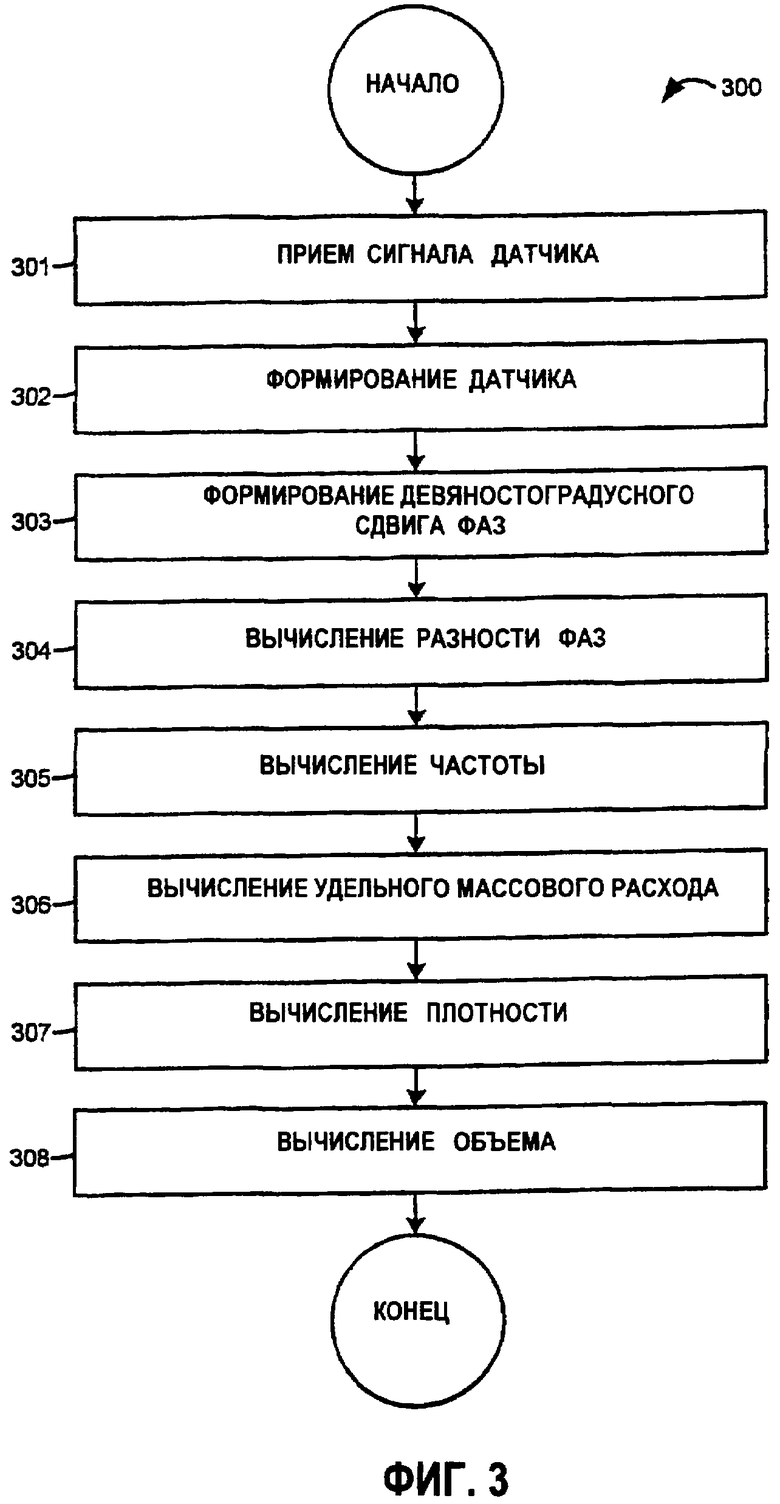
На Фиг.3 представлена блок-схема 300 последовательности операций способа обработки сигналов датчиков в расходомере согласно варианту осуществления изобретения. На этапе 301 принимают первый и второй сигналы датчиков. Первый сигнал датчика может содержать сигнал чувствительного элемента датчика, расположенного либо выше либо ниже по потоку.
На этапе 302 сигналы датчиков могут быть сформированы. В одном варианте осуществления формирование может включать в себя фильтрацию, чтобы удалить шум и избыточные сигналы. Фильтрация может содержать полосовую фильтрацию, центрированную вокруг ожидаемой собственной частоты расходомера. Кроме этого, могут осуществляться другие операции формирования, такие как усиление, буферизация и т.д. Если сигналы датчиков содержат аналоговые сигналы, этап дополнительно может содержать любой способ дискретизации, оцифровывания и прореживания, который выполняется для того, чтобы сформировать цифровые сигналы датчиков.
На этапе 303 формируется один сдвиг фаз на 90 градусов. Указанный сдвиг фаз содержит сдвиг фаз на 90 градусов сигнала датчика. Сдвиг фаз может выполняться посредством любого механизма или работы сдвига фаз. В одном варианте осуществления сдвиг фаз на 90 градусов выполняют с помощью преобразования Гилберта для цифровых сигналов датчиков.
На этапе 304 вычисляют разность фаз с помощью одного сдвига фаз на 90 градусов. Дополнительная информация также может быть использована для того, чтобы вычислять разность фаз. В одном варианте осуществления разность фаз определяют из первого сигнала датчика, второго сигнала датчика и одного сдвига фаз на 90 градусов. Разность фаз содержит разность фаз в ответном сигнале, т.е. в чувствительном элементе датчика, которая видна благодаря эффекту Кориолиса в колеблющемся блоке 10 измерителя.
Результирующую разность фаз определяют без необходимости значения частоты в вычислениях. Результирующая разность фаз может быть получена гораздо быстрее, чем разность фаз, вычисленная с помощью частоты. Результирующая разность фаз имеет большую точность, чем разность фаз, вычисленная с помощью частоты.
На этапе 305 вычисляют частоту. Частоту согласно изобретению преимущественно вычисляют из сдвига фаз на 90 градусов. Частота в одном варианте осуществления использует сдвиг фаз на 90 градусов и соответствующий сигнал датчика, из которого получается сдвиг фаз на 90 градусов. Частота - это частотная характеристика колебаний одного из первого сигнала датчика и второго сигнала датчика (частоты двух сигналов датчиков практически одинаковы при работе). Частота содержит частотную характеристику колебаний расходомерной трубки или расходомерных трубок для колебаний, формируемых посредством приводного механизма 180.
Таким образом, частоту получают без необходимости какого-либо независимого частотного опорного сигнала. Частоту получают из одного сдвига фаз на 90 градусов в ходе операций, которые выполняются гораздо быстрее, чем в предшествующем уровне техники. Результирующая частота имеет большую точность, чем частота, вычисленная в предшествующем уровне техники.
На этапе 306 вычисляют удельный массовый расход расходуемого вещества. Удельный массовый расход вычисляют из результирующей разности фаз и результирующей частоты, вычисленной на этапах 304 и 305. Кроме этого, вычисление удельного массового расхода позволяет вычислять разность времен (Δt) из разности фаз и частоты, причем разность времен (Δt) в конечном счете используют для того, чтобы вычислять удельный массовый расход.
На этапе 307 необязательно может быть определена плотность. Плотность может быть определена как одна из характеристик расхода и может быть определена, например, из частоты.
На этапе 308 может быть определен удельный объемный расход. Удельный объемный расход может быть определен как одна из характеристик расхода и может быть определен, например, из удельного массового расхода и плотности.
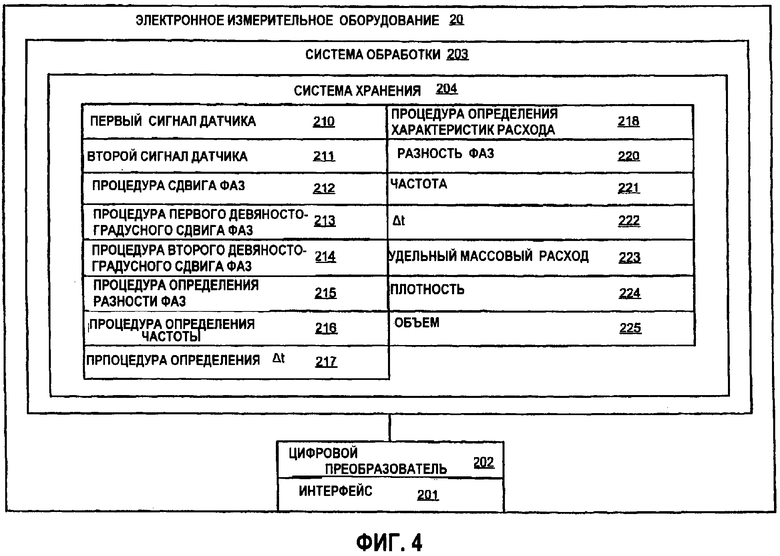
На Фиг.4 показана схема электронного измерительного оборудования 20 согласно варианту осуществления изобретения.
Электронное измерительное оборудование 20 в этом варианте осуществления получает первый сигнал 210 датчика и второй сигнал 211 датчика. Система 203 обработки обрабатывает первый и второй (цифровые) сигналы 210 и 211 датчиков, чтобы определить одну или более характеристик расхода. Как описано выше, одна или более характеристик расхода может включать в себя разность фаз, частоту, разность времен (Δt), удельный массовый расход, плотность и/или удельный объемный расход для расходуемого вещества.
В описываемом варианте осуществления система 203 обработки определяет характеристики расхода только из двух сигналов 210 и 211 датчиков без необходимости какого-либо внешнего измерения частоты и без необходимости внешнего частотного опорного сигнала. Система 203 обработки может определять, по меньшей мере, разность фаз и частоту из двух сигналов 210 и 211 датчиков.
Как описано выше, система 204 хранения сохраняет процедуру 212 вычисления сдвига фаз, процедуру 215 вычисления разности фаз, процедуру 216 вычисления частоты, процедуру 217 вычисления разности времен (Δt) и процедуру 218 вычисления характеристик потока. Система 204 хранения сохраняет первый сигнал 210 датчика и второй сигнал 211 датчика. Система 204 хранения также сохраняет первый девяностоградусный сдвиг 213 фаз и второй девяностоградусный сдвиг, которые формируются из сигналов датчиков, чтобы определять характеристики потока. Как описано выше, система 204 хранения сохраняет разность 220 фаз, частоту, разность (Δt) 222 времен, удельный массовый расход 223, плотность 224 и удельный объемный расход 225.
Процедура 212 сдвига фаз выполняет сдвиг фаз на 90 градусов для входного сигнала, в том числе первого сигнала 210 датчика и второго сигнала 211 датчика. Процедура 212 сдвига фаз в одном варианте осуществления реализует преобразование Гилберта (описано ниже). Процедура 215 разности фаз определяет разность фаз с помощью первого сдвига 213 фаз на 90 градусов и второго сдвига 214 фаз на 90 градусов. Дополнительная информация также может быть использована для того, чтобы вычислять разность фаз. Разность фаз в одном варианте осуществления вычисляется из первого сигнала 210 датчика, второго сигнала 211 датчика, первого сдвига 212 фаз и второго сдвига 213 фаз. Определенная разность фаз может быть сохранена в разности 220 фаз системы 204 хранения, как описано выше. Разность фаз, когда определена с помощью первого и второго сдвига фаз, может быть вычислена и получена гораздо быстрее, чем в предшествующем уровне техники. Это позволяет обеспечить критичную разность в вариантах применения расходомеров, имеющих высокий удельный расход, или где возникают многофазные потоки. Кроме этого, разность фаз может быть определена независимо от частоты любого сигнала 210 или 211 датчиков. Более того, поскольку разность фаз определяется независимо от частоты, компонент ошибки в разности фаз не содержит компонент ошибки определения частоты, т.е. нет накапливающейся ошибки в измерении разности фаз. Следовательно, ошибка разности фаз уменьшается по сравнению с разностью фаз в предшествующем уровне техники.
Процедура 216 вычисления частоты определяет частоту (например, испытываемую первым сигналом 210 датчика или вторым сигналом 211 датчика) из первого девяностоградусного сдвига 213 фаз и второго девяностоградусного сдвига 214 фаз. Определенная частота может быть сохранена в частоте 221 системы 204 хранения, как описано выше. Частота после определения с помощью первого и второго девяностоградусного сдвига фаз может быть вычислена и получена гораздо быстрее, чем в предшествующем уровне техники. Это позволяет обеспечить критичную разность в вариантах применения расходомеров, имеющих высокий удельный расход, или где возникают многофазные потоки.
Процедура 217 вычисления разности времен (Δt) определяет разность времен (Δt) между первым сигналом 210 датчика и вторым сигналом 211 датчика. Разность времен (Δt) может быть сохранена в разности времен (Δt) 222 системы 204 хранения, как описано выше. Разность времен (Δt) содержит практически определенную фазу, поделенную на определенную частоту, и, следовательно, используется для того, чтобы определять удельный массовый расход.
Процедура 218 определения характеристик расхода может определять одну характеристику из удельного массового расхода, плотности и/или удельного объемного расхода, как описано выше.
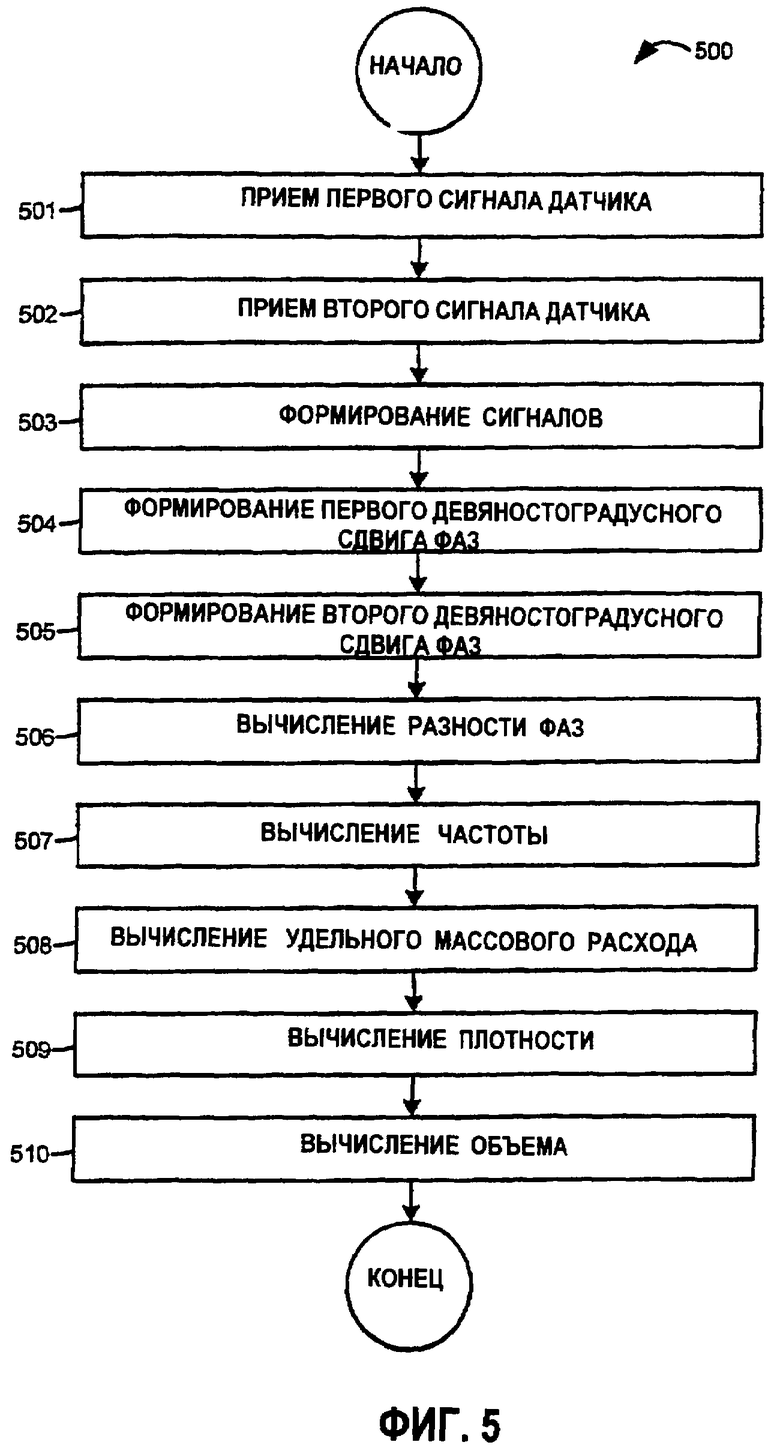
На Фиг.5 представлена блок-схема 500 последовательности операций способа обработки первого и второго сигналов датчиков в расходомере согласно варианту осуществления изобретения. На этапе 501 принимают первый сигнал датчика. В одном варианте осуществления первый сигнал датчика может содержать сигнал чувствительного элемента датчика, расположенного либо выше либо ниже по потоку.
На этапе 502 принимают второй сигнал датчика. В одном варианте осуществления второй сигнал датчика содержит сигнал чувствительного элемента датчика, расположенного либо ниже либо выше по потоку (т.е. в противоположность первому сигналу датчика).
На этапе 503 сигналы датчиков могут быть сформированы. В одном варианте осуществления формирование может включать в себя фильтрацию, чтобы удалить шум и избыточные сигналы. Фильтрация может содержать полосовую фильтрацию, как описано выше. Кроме этого, могут осуществляться другие операции формирования, такие как усиление, буферизация и т.д. Если сигналы датчиков содержат аналоговые сигналы, этап дополнительно может содержать любой способ дискретизации, оцифровывания и прореживания, который выполняется для того, чтобы сформировать цифровые сигналы датчиков.
На этапе 504 формируют первый сдвиг фаз на 90 градусов. Первый сдвиг фаз содержит сдвиг фаз первого сигнала датчика. Сдвиг фаз может выполняться посредством любого варианта механизма или работы. В одном варианте осуществления сдвиг фаз выполняют с помощью преобразования Гилберта, выполняемого для цифровых сигналов датчиков.
На этапе 505 формируют второй сдвиг фаз на 90 градусов. Второй сдвиг фаз содержит девяностоградусный сдвиг фаз второго сигнала датчика. Как и первый сдвиг фаз, второй девяностоградусный сдвиг фаз может выполняться посредством любого механизма или работы.
На этапе 506 вычисляют разность фаз между первым сигналом датчика и вторым сигналом датчика с помощью первого девяностоградусного сдвига фаз и второго девяностоградусного сдвига фаз. Дополнительная информация также может быть использована для того, чтобы вычислять разность фаз. В одном варианте осуществления разность фаз определяется из первого сигнала датчика, второго сигнала датчика, первого девяностоградусного сдвига фаз и второго девяностоградусного сдвига фаз. Разность фаз содержит разность фаз в ответном сигнале, т.е. в двух чувствительных элементах датчиков, которая видна благодаря эффекту Кориолиса в колеблющемся блоке 10 измерителя.
Результирующую разность фаз определяют без необходимости какого-либо значения частоты в вычислениях. Результирующая разность фаз может быть получена гораздо быстрее, чем разность фаз, вычисленная с помощью частоты. Результирующая разность фаз имеет большую точность, чем разность фаз, вычисленная с помощью частоты.
На этапе 507 вычисляют частоту. Частоту согласно изобретению преимущественно вычисляют из первого девяностоградусного сдвига фаз и второго девяностоградусного сдвига фаз. Частота в одном варианте осуществления использует девяностоградусный сдвиг фаз и соответствующий сигнал датчика, из которого извлекается девяностоградусный сдвиг фаз. Частота - это частотная характеристика колебаний одного из первого сигнала датчика и второго сигнала датчика (частоты двух сигналов датчиков практически одинаковы при работе). Частота содержит частотную характеристику колебаний расходомерной трубки или расходомерных трубок для колебаний, формируемых посредством приводного механизма 180.
Таким образом частоту получают без необходимости какого-либо независимого частотного опорного сигнала. Частоту получают из девяностоградусных сдвигов фаз в ходе операций, которые выполняются гораздо быстрее, чем в предшествующем уровне техники. Результирующая частота имеет большую точность, чем частота, вычисленная в предшествующем уровне техники.
На этапе 508 вычисляют удельный массовый расход расходуемого вещества. Удельный массовый расход вычисляют из результирующей разности фаз и результирующей частоты, вычисленной на этапах 506 и 507. Кроме этого, вычисление удельного массового расхода позволяет вычислять разность времен (Δt) из разности фаз и частоты, причем разность времен (Δt) в конечном счете используется для того, чтобы вычислять удельный массовый расход.
На этапе 509 необязательно может быть определена плотность, как описано выше.
На этапе 510 необязательно может быть определен удельный массовый расход, как описано выше.
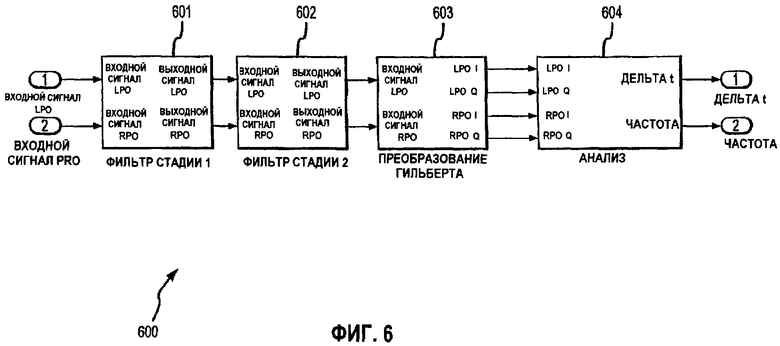
На Фиг.6 представлена блок-схема 600 части системы 203 обработки согласно варианту осуществления настоящего изобретения. На этом чертеже прямоугольники представляют либо схему обработки либо операции обработки. Блок-схема 600 включает в себя блок 601 фильтров стадии 1, блок 602 фильтров стадии 2, блок 603 преобразования Гилберта и блок 604 анализа. Входы LPO и RPO содержат вход сигнала левого датчика и вход сигнала правого датчика. LPO или RPO могут содержать первый сигнал датчика.
В одном варианте осуществления блок 601 фильтров стадии 1 и блок 602 фильтров стадии 2 содержат цифровые прореживающие многофазные фильтры с конечной импульсной характеристикой (FIR), реализованные в системе 203 обработки. Эти фильтры предоставляют оптимальный способ фильтрации и прореживания одного или обоих сигналов датчиков, причем фильтрация и прореживание выполняется в одно хронологическое время и с одной частотой прореживания.
Альтернативно блок 601 фильтров стадии 1 и блок 602 фильтров стадии 2 могут содержать фильтры с бесконечной импульсной характеристикой (IIR) или другие подходящие цифровые фильтры или процессы фильтрации. Тем не менее, следует понимать, что другие процессы фильтрации и/или варианты осуществления фильтрации предполагаются и находятся в рамках области применения описания и формулы изобретения.
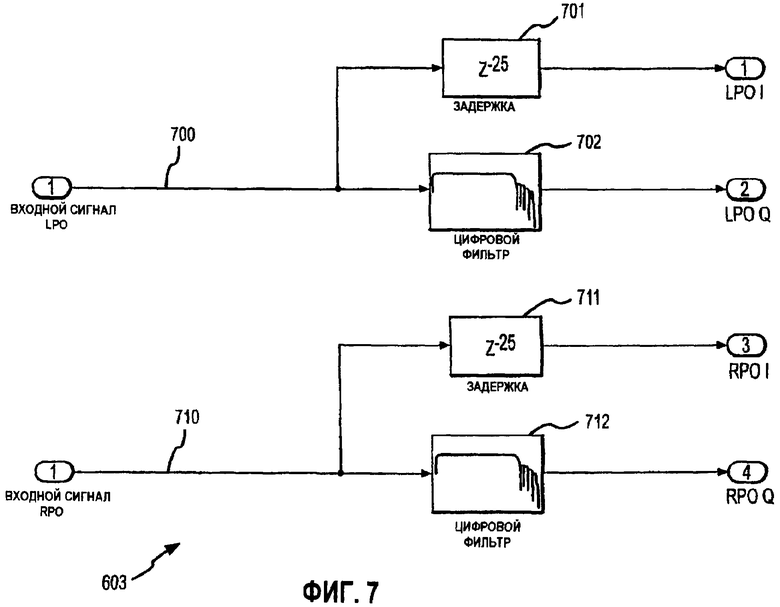
На Фиг.7 подробно показан блок 603 преобразования Гилберта согласно варианту осуществления изобретения. В описываемом варианте осуществления блок 603 преобразования Гилберта содержит LPO-ветвь 700 и RPO-ветвь 710. LPO-ветвь 700 включает в себя блок 701 LPO-задержки, параллельный с блоком 702 LPO-фильтров. Аналогично RPO-ветвь включает в себя блок 711 RPO-задержки, параллельный с блоком 712 RPO-фильтров. Блок 701 LPO-задержки и блок 711 RPO-задержки предоставляют задержки дискретизации. Блок LPO-задержки и блок 711 RPO-задержки соответственно выбирают выборки цифровых LPO- и RPO-сигналов, которые хронологически идут позже во времени, чем выборки цифровых LPO- и RPO-сигналов, которые фильтрованы посредством блока 702 LPO-фильтров и блока 712 RPO-фильтров. Блок 702 LPO-фильтров и блок 712 RPO-фильтров выполняют девяностоградусный сдвиг фаз для введенных выборок цифровых сигналов.
Блок 603 преобразования Гилберта - это первый шаг предоставления измерения фаз. Блок 603 преобразования Гилберта принимает фильтрованные прореженные LPO- и RPO-сигналы и выполняет преобразование Гилберта. Преобразование Гилберта формирует версии с девяностоградусным сдвигом фаз LPO- и RPO- сигналов, т.е. формирует квадратурные (Q) составляющие исходных синфазных (I) составляющих сигнала. Вывод блока 603 преобразования Гилберта соответственно предоставляет новые квадратурные (Q) составляющие LPO Q и RPO Q наряду с исходными синфазными (I) составляющими сигнала LPO I и RPO I.
Входящие в блок 603 преобразования Гилберта сигналы могут быть представлены как:
LPO=Alpo cos(ωt) (2)
RPO=Arpo cos(ωt+⌀) (3)
При использовании преобразования Гилберта выходные сигналы становятся равными:
LPOhilbert=Alpo sin(ωt) (4)
RPOhilbert=Arpo sin(ωt+⌀) (5)
Объединение исходных членов с выходными сигналами преобразования Гилберта дает:
LPO=Alpo [cos(ωt)+i sin(ωt)]=Alpoej(ωt) (6)
RPO=Arpo [cos(ωt+⌀)+i sin(ωt+⌀)]=Arpoej(ωt+⌀) (7)
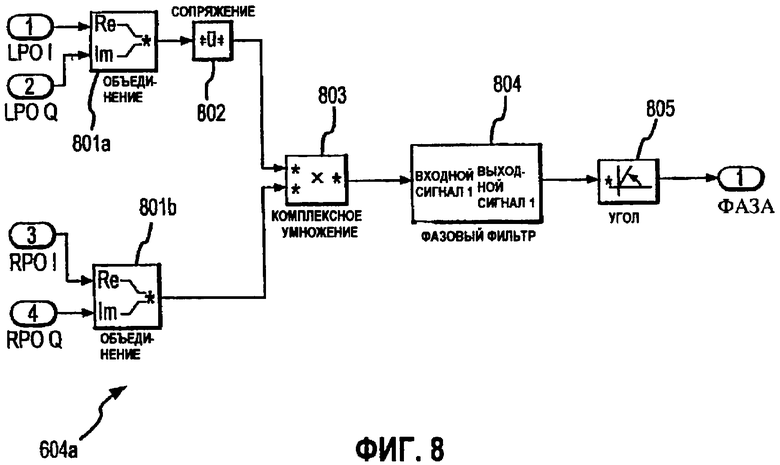
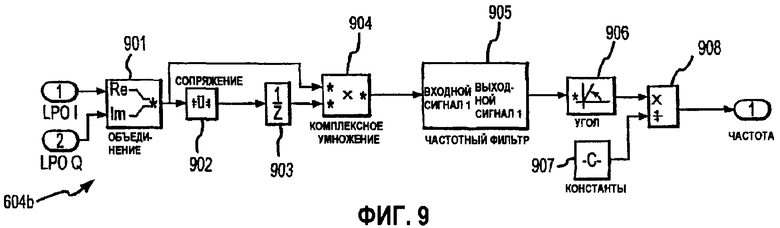
На Фиг.8 и 9 представлены блок-схемы двух независимых веток блока 604 анализа согласно варианту осуществления изобретения. Блок 604 анализа - это конечная стадия измерений частоты, дифференциальной фазы и дельты T (Δt). Фиг.8 - это часть 604a фазы, содержащая первую ветку, которая определяет разность фаз из синфазных (I) и квадратурных (Q) составляющих. Фиг.9 - это часть 604b частоты, которая определяет частоту из синфазных (I) и квадратурных (Q) составляющих одного сигнала датчика. Один сигнал датчика может содержать LPO-сигнал, как показано, или альтернативно может содержать RPO-сигнал.
В варианте осуществления на фиг.8 часть 604a фазы блока 604 анализа содержит блоки 801a и 801b объединения, блок 802 сопряжения, блок 803 комплексного умножения, блок 804 фильтрации и блок 805 фазового угла.
Блоки 801a и 801b объединения принимают синфазные (I) и квадратурные (Q) составляющие сигнала датчика и передают их дальше. Блок 802 сопряжения выполняет комплексное сопряжение для сигнала датчика (здесь LPO-сигнала) и формирует отрицательную величину мнимого сигнала. Блок 803 комплексного умножения умножает RPO-сигнал и LPO-сигнал, реализуя нижеприведенное уравнение (8). Блок 804 фильтрации реализует цифровой фильтр, такой как описанный выше FIR-фильтр. Блок 804 фильтрации может содержать прореживающий многофазный фильтр, который используется для того, чтобы удалять содержание гармоник из синфазных (I) и квадратурных (Q) составляющих сигнала датчика, а также для того, чтобы прореживать сигнал. Коэффициенты фильтрации могут выбираться таким образом, чтобы предоставлять прореживание входящего сигнала, например прореживание на коэффициент 10. Блок 805 фазового угла определяет фазовый угол из синфазных (I) и квадратурных (Q) составляющих LPO-сигнала и RPO-сигнала. Блок 805 фазового угла реализует уравнение (11), приведенное ниже.
Часть 604a фазы, показанная на фиг.8, реализует следующее уравнение:
 RPO=Alpoe-j(ωt)
RPO=Alpoe-j(ωt)
 ARpoej(ωt+⌀)=Alpo
ARpoej(ωt+⌀)=Alpo
 ARpoej(-ωt+ωt+⌀) (8)
ARpoej(-ωt+ωt+⌀) (8)
где LPO - это комплексно-сопряженная величина LPO. При условии, что:
ARpo=ALpo=A (9)
тогда:
RPO=A2ej(⌀)=A2 [cos(⌀)+i sin(⌀)] (10)
Результирующий угол дифференциальной фазы равен:
 (11)
(11)
На Фиг.9 представлена блок-схема части 604b частоты блока 604 анализа согласно изобретению. Часть 604b частоты может управлять сигналом либо левого либо правого датчика (LPO или RPO). Часть 604b частоты в показанном варианте осуществления включает в себя блок 901 объединения, блок 902 комплексного сопряжения, блок 903 дискретизации, блок 904 комплексного умножения, блок 905 фильтрации, блок 906 фазового угла, блок 907 констант и блок 908 деления.
Как описано выше, блок 901 объединения принимает синфазные (I) и квадратурные (Q) составляющие сигнала датчика и передает их дальше. Блок 902 сопряжения выполняет комплексное сопряжение для сигнала датчика, здесь LPO-сигнала, и формирует отрицательную величину мнимого сигнала. Блок 903 задержки вводит задержку в часть 604b частоты и, следовательно, выбирает выборку цифровых сигналов, которая хронологически позже по времени. Эта более старая выборка цифровых сигналов умножается с текущим цифровым сигналом в блоке 904 комплексного умножения. Блок 904 комплексного умножения умножает LPO-сигнал и сопряженный LPO-сигнал, реализуя уравнение (12) ниже. Блок 905 фильтрации реализует цифровой фильтр, такой как ранее описанный FIR-фильтр. Блок 905 фильтрации может содержать прореживающий многофазный фильтр, который используется для того, чтобы удалять содержание гармоник из синфазных (I) и квадратурных (Q) составляющих сигнала датчика, а также для того, чтобы прореживать сигнал. Коэффициенты фильтрации могут выбираться таким образом, чтобы предоставлять прореживание вводимого сигнала, такое как, к примеру, прореживание на коэффициент 10. Блок 906 фазового угла определяет фазовый угол из синфазных (I) и квадратурных (Q) составляющих LPO-сигнала. Блок 906 фазового угла реализует часть уравнения (13) ниже. Блок 907 констант предоставляет коэффициент, содержащий частоту Fs, поделенную два пи, как показано в уравнении (14). Блок 908 деления выполняет операцию деления в уравнении (14).
Часть 604b частоты реализует следующее уравнение:
 LPO(n)=Alpoe-j(ωt-1)
ALpoej(ωt)=A2 lpoej(ωt-ωt-1) (12)
LPO(n)=Alpoe-j(ωt-1)
ALpoej(ωt)=A2 lpoej(ωt-ωt-1) (12)
Следовательно, угол между двумя последовательными выборками составляет:
 (13)
(13)
что является угловой частотой левого датчика. Преобразуя в Гц:
 (14)
(14)
где Fs - частота блока 603 преобразования Гилберта. В ранее описанном примере Fs составляет около 2 кГц.
На Фиг.10 представлена диаграмма спектральной плотности мощности сигнала чувствительного элемента датчика расходомера при обычных условиях. Собственная частота расходомера - это наибольший пик на графике и она находится в районе около 135 Гц. Чертеж также показывает несколько других крупных пиков в частотном спектре (первая не основная мода - это крутильная мода на частоте, в 1,5 раза превышающей частоту основной моды). Эти пики содержат гармонические частоты расходомера и также содержат другие нежелательные моды датчика (т.е. крутильную моду, вторую изгибную моду и т.д.).
На Фиг.11 показан альтернативный блок 603' преобразования Гилберта согласно варианту осуществления с одним сдвигом фаз. Блок 603' преобразования Гилберта в этом варианте осуществления включает в себя LPO-ветвь 1100 и RPO-ветвь 1110. LPO-ветвь 1100 включает в себя блок 701 задержки, параллельный с блоком 702 фильтрации. RPO-ветвь 1110 в этом варианте осуществления включает в себя только блок 701 задержки. Как и ранее, блок 701 задержки предоставляет задержки дискретизации. Как и ранее, блок 702 фильтрации выполняет девяностоградусный сдвиг фаз для введенных выборок цифровых сигналов. Следует понимать, что альтернативно блок 603' преобразования может выполнять сдвиг фаз только для RPO-сигнала.
Этот вариант осуществления обработки использует преобразование Гилберта/сдвиг фаз только одного сигнала датчика, чтобы извлекать и частоту, и разность фаз (фиг.2-3). Это существенно снижает объем вычислений, требуемый для того, чтобы выполнять измерение фаз, и существенно снижает объем вычислений, требуемый для того, чтобы получить удельный массовый расход.
В этом варианте осуществления вывод блока 603' преобразования Гилберта предоставляет квадратурную (Q) составляющую правого или левого сигнала датчика, но не обоих. В нижеприведенном примере LPO-сигнал сдвинут по фазе:
LPO=Alpo cos(ωt) (26)
RPO=Arpo cos(ωt+⌀) (27)
При использовании преобразования Гилберта вывод становится равным:
LPOhilbert=Alpo sin(ωt) (28)
RPO=Arpo sin(ωt+⌀) (29)
Объединение исходного члена LPO с выводом преобразования Гилберта (т.е. с девяностоградусным сдвигом фаз) дает:
LPO=Alpo [cos(ωt)+i sin(ωt)]=Alpoej(ωt) (30)
тогда как RPO остается неизменным:
 (31)
(31)
На Фиг.12 показан блок 604a' анализа для варианта осуществления с одним сдвигом фаз. Блок 604a' анализа в этом варианте осуществления включает в себя один блок 801 объединения, блок 803 комплексного умножения, блок 1201 фильтра нижних частот и блок 805 фазового угла. Блок 604a' анализа в этом варианте осуществления реализует следующее уравнение:
 (32)
(32)
Блок 1201 фильтра нижних частот содержит фильтр нижних частот, который удаляет высокочастотную составляющую, формируемую посредством блока 803 комплексного умножения. Блок 1201 фильтра нижних частот может реализовывать любой вариант операции низкочастотной фильтрации. Результат операции умножения формирует два члена. Член (-ωt+ωt+⌀) объединяется и упрощается до чисто фазового члена ⌀ (результат DC), тогда как члены (-ωt) и (ωt) уравновешивают друг друга, (ωt+ωt+⌀) упрощается до члена (2ωt+⌀) при удвоении частоты. Поскольку результатом является сумма двух членов, высокочастотный член (2ωt+⌀) может быть удален. Единственным интересующим в данном случае сигналом является член DC. Высокочастотный член (2ωt+⌀) может быть отфильтрован из результата с помощью фильтра нижних частот.Отсечка фильтра нижних частот может располагаться в любом месте между нулем и 2ω.
После фильтрации результат равен:
 (33)
(33)
Следовательно, угол дифференциальной фазы равен:
(34)
Посредством преобразования Гилберта одного сигнала датчика вместо двух вычислительная нагрузка, требуемая для того, чтобы выполнять оценку фазы и частоты в массовом расходомере Кориолиса, преимущественно снижается. Следовательно, фаза и частота могут определяться с помощью двух сигналов датчиков, но с использованием только одного девяностоградусного сдвига фаз.
На Фиг.13 представлены диаграммы обработки в датчике согласно изобретению в сравнении с предшествующим уровнем техники, где сравнивается значение разности времен (Δt) для каждого элемента. Диаграмма показывает расходуемое вещество, включающее в себя поток газа (например, газовые пузырьки). При этом условии шум расхода значительно уменьшен в новом алгоритме благодаря скорости вычисления фазы и частоты. Из диаграммы можно видеть, что полученный результат не иллюстрирует крупные пики и точки минимума, которые отражаются в измерениях (Δt) предшествующего уровня техники.
Изобретение отличается от предшествующего уровня техники. Во-первых, в предшествующем уровне техники типично определяли частоту датчика с помощью сигнала датчика и независимого источника частоты, такого как сигнал приводного механизма, отправляемый в систему приводного механизма, чтобы определять частотную характеристику колебаний. В отличие от этого согласно изобретению определяют частоту посредством сдвига фазы одного из двух сигналов датчиков. В предшествующем уровне техники не определяли частотную характеристику колебаний из сдвига фаз сигнала датчика.
Во-вторых, большинство расходомеров предшествующего уровня техники определяют разность фаз между сигналами датчиков с помощью определения частоты. Как следствие, все ошибки, включенные в определение частоты, включаются в определение разности фаз, накапливаясь в общей ошибке при определении удельного массового расхода. В отличие от этого, согласно изобретению определяют разность фаз непосредственно из одного или двух сдвинутых по фазе сигналов датчиков без применения какого-либо определения частоты.
Как результат все члены ошибки являются результатом только обработки фаз и измерения фаз при определении разности фаз и на них не влияют никакие ошибки определения частоты.
В-третьих, в предшествующем уровне техники определяли удельный массовый расход с помощью независимо определенной внешней частоты. Типично предшествующий уровень техники также использует разность фаз, которая получена с помощью независимо определенной внешней частоты. Следовательно, в предшествующем уровне техники на удельный массовый расход дважды влияет любая ошибка при определении частоты и соответственно он не является достаточно точным и надежным. В отличие от этого в заявленном изобретении определение частоты и определение разности фаз осуществляют независимо. Определение частоты и определение разности фаз в изобретении, как следствие, имеет гораздо меньшую составляющую ошибки. Как результат с помощью электронного измерительного оборудования и заявленного способа величина ошибки в определении удельного массового расхода значительно снижается. Следовательно, плотность и удельный объемный расход согласно изобретению также улучшаются по точности и надежности.
В-четвертых, определение частоты по предшествующему уровню техники занимает достаточно длительное время. В ситуациях, когда расходуемое вещество содержит двухфазный или трехфазный поток, например жидкость, включающая в себя захваченные твердые вещества и/или захваченные газы (такие как пузырьки воздуха), определение частоты может занимать до 1-2 с, чтобы обеспечить стабильное и относительно точное измерение частоты. В отличие от этого определение частоты и разности фаз согласно изобретению может быть получено гораздо быстрее, например, за миллисекунды или сотни миллисекунд. Все характеристики расхода, получаемые из частоты и разности фаз, также могут быть получены за гораздо меньшее время.
Электронное измерительное оборудование и способ обработки сигналов датчиков согласно изобретению может быть реализован согласно любым вариантам осуществления, чтобы получить несколько преимуществ при необходимости. Изобретение позволяет вычислять разность фаз из двух сдвинутых по фазе сигналов датчиков. Изобретение позволяет определять разности фаз с большей точностью и надежностью. Изобретение позволяет определять разности фаз быстрее, чем предшествующий уровень техники, при этом требуется меньшее время обработки.
Изобретение позволяет вычислять частоту только из одного сдвинутого по фазе сигнала датчика. Изобретение позволяет определять частоту с большей точностью и надежностью. Изобретение позволяет определять частоту быстрее, чем в предшествующем уровне техники, при этом за меньшее время обработки.
Изобретение позволяет вычислять удельный массовый расход, плотность и/или удельный объемный расход, помимо прочего, только из одного или двух сигналов датчиков. Изобретение позволяет определять удельный массовый расход с большей точностью и надежностью. Изобретение позволяет определять удельный массовый расход быстрее, чем в предшествующем уровне техники, при этом затрачивая меньшее время на обработку. Следовательно, изобретение обеспечивает гораздо большую производительность для флюидов с захваченным воздухом, состояний "пусто - полно - пусто", газовых вариантов применения и состояний установившегося режима.
Изобретение может быть использовано в расходомерах Кориолиса. Способ обработки сигналов датчиков в расходомере для последующего вычисления массового расхода плотности и объемного расхода реализуется электронным измерительным оборудованием, содержащим интерфейс для приема первого сигнала датчика и второго сигнала датчика и связанную с интерфейсом систему обработки, предназначенную для формирования девяностоградусного сдвига фаз из первого сигнала датчика с помощью преобразования Гилберта и вычисления разности фаз из девяностоградусного сдвига фаз, первого сигнала датчика и второго сигнала датчика. Частоту вычисляют из первого сигнала датчика и девяностоградусного сдвига фаз. Второй девяностоградусный сдвиг фаз может быть сформирован из второго сигнала датчика. Предложен ряд вариантов способов обработки сигналов. Изобретение повышает точность измерения массового и объемного расхода. 8 н. и 27 з.п. ф-лы, 13 ил.
1. Электронное измерительное оборудование для обработки сигналов датчика в расходомере, содержащее интерфейс (201) для приема первого сигнала датчика и второго сигнала датчика и систему (203) обработки, связанную с интерфейсом (201), отличающееся тем, что система (203) обработки выполнена с возможностью формирования сдвига фаз на 90° из первого сигнала датчика и вычисления частоты из первого сигнала датчика и указанного сдвига фаз.
2. Электронное измерительное оборудование по п.1, отличающееся тем, что интерфейс (201) содержит цифровой преобразователь (202),
сконфигурированный для оцифровывания сигнала датчика.
3. Электронное измерительное оборудование по п.1, отличающееся тем, что дополнительно выполнено с возможностью приведения к требуемым условиям первого сигнала датчика и второго сигнала датчика до формирования девяностоградусного сдвига фаз из первого сигнала датчика.
4. Электронное измерительное оборудование по п.1, отличающееся тем, что дополнительно выполнено с возможностью вычисления разности фаз из первого сигнала датчика, девяностоградусного сдвига фаз и второго сигнала датчика.
5. Электронное измерительное оборудование по п.1, отличающееся тем, что система (203) обработки дополнительно выполнена с возможностью вычисления одной или более характеристик, выбранных из группы, состоящей из массового расхода, плотности и объемного расхода.
6. Электронное измерительное оборудование по п.1, отличающееся тем, что система (203) обработки дополнительно выполнена с возможностью вычисления разности фаз из первого сигнала датчика, девяностоградусного сдвига фаз и второго сигнала датчика и вычисления массового расхода из разности фаз и из частоты.
7. Электронное измерительное оборудование для обработки сигналов датчика в расходомере, содержащее интерфейс (201) для приема первого сигнала датчика и второго сигнала датчика и систему (203) обработки, связанную с интерфейсом (201), отличающееся тем, что система (203) обработки выполнена с возможностью формирования первого сдвига на 90° из первого сигнала датчика, вычисления частоты из первого сигнала датчика и первого указанного сдвига фаз, а также вычисления разности фаз из первого сигнала датчика, первого указанного сдвига фаз и второго сигнала датчика.
8. Электронное измерительное оборудование (20) по п.7, отличающееся тем, что интерфейс (201) содержит цифровой преобразователь (202), выполненный с возможностью оцифровывания сигнала датчика.
9. Электронное измерительное оборудование (20) по п.7, отличающееся тем, что дополнительно выполнено с возможностью приведения к требуемым условиям первого сигнала датчика и второго сигнала датчика до формирования указанного сдвига фаз из первого сигнала датчика.
10. Электронное измерительное оборудование (20) по п.7, отличающееся тем, что система (203) обработки дополнительно выполнена с возможностью вычисления одной или более характеристик из группы, состоящей из массового расхода, плотности и объемного расхода.
11. Электронное измерительное оборудование (20) по п.7, отличающееся тем, что система (203) обработки выполнена с возможностью вычисления массового расхода из разности фаз и из частоты.
12. Способ обработки сигналов датчика в расходомере, заключающийся в том, что принимают первый сигнал датчика и второй сигнал датчика, отличающийся тем, что формируют сдвиг фаз на 90° из первого сигнала датчика;
вычисляют частоту из первого сигнала датчика и указанного сдвига фаз.
13. Способ по п.12, отличающийся тем, что дополнительно приводят к требуемым условиям первый сигнал датчика и второй сигнал датчика до этапа вычисления указанного сдвига фаз.
14. Способ по п.12, отличающийся тем, что при вычислении дополнительно вычисляют разность фаз из первого сигнала датчика, девяностоградусного сдвига фаз и второго сигнала датчика.
15. Способ по п.12, отличающийся тем, что вычисляют разность фаз из первого сигнала датчика, девяностоградусного сдвига фаз и второго сигнала датчика, вычисляют одну или более характеристик из группы, состоящей из массового расхода, плотности и объемного расхода.
16. Способ по п.12, отличающийся тем, что дополнительно вычисляют девяностоградусный сдвиг фаз с помощью преобразования Гилберта.
17. Способ обработки сигналов датчика в расходомере, заключающийся в том, что принимают первый сигнал датчика и второй сигнал датчика, отличающийся тем, что формируют сдвиг фаз на 90° из первого сигнала датчика;
вычисляют частоту из первого сигнала датчика и девяностоградусного сдвига фаз,
вычисляют разность фаз из первого сигнала датчика, девяностоградусного сдвига фаз и второго сигнала датчика.
18. Способ по п.17, отличающийся тем, что дополнительно приводят к требуемым условиям первый сигнал датчика и второй сигнал датчика до этапа вычисления девяностоградусного сдвига фаз.
19. Способ по п.17, отличающийся тем, что дополнительно вычисляют одну или более характеристик из группы, состоящей из массового расхода, плотности и объемного расхода.
20. Способ по п.17, отличающийся тем, что вычисляют девяностоградусный сдвиг фаз с помощью преобразования Гилберта.
21. Способ обработки сигналов датчика в расходомере, заключающийся в том, что принимают первый сигнал датчика и второй сигнал датчика, отличающийся тем, что формируют сдвиг фаз на 90° из первого сигнала датчика, вычисляют разность фаз из первого сигнала датчика, девяностоградусного сдвига фаз и второго сигнала датчика;
вычисляют частоту из первого сигнала датчика и девяностоградусного сдвига фаз, и вычисляют одну или более характеристик из группы, состоящей из массового расхода, плотности и объемного расхода.
22. Способ по п.21, отличающийся тем, что дополнительно приводят к требуемым условиям первый сигнал датчика и второй сигнал датчика до этапа вычисления девяностоградусного сдвига фаз.
23. Способ по п.21, отличающийся тем, что вычисляют сдвиг фаз на 90° с помощью преобразования Гилберта.
24. Способ обработки сигналов датчика в расходомере, заключающийся в том, что принимают первый сигнал датчика и второй сигнал датчика, отличающийся тем, что формируют первый сдвиг фаз на 90° из первого сигнала датчика и формируют второй сдвиг фаз на 90° из второго сигнала датчика, вычисляют частоту из первого сигнала датчика и первого девяностоградусного сдвига фаз или вычисляют частоту из второго сигнала датчика и второго девяностоградусного сдвига фаз.
25. Способ по п.24, отличающийся тем, что дополнительно приводят к требуемым условиям первый сигнал датчика и второй сигнал датчика до этапа вычисления первого девяностоградусного сдвига фаз и второго девяностоградусного сдвига фаз.
26. Способ по п.24, отличающийся тем, что дополнительно вычисляют разность фаз из первого сигнала датчика, первого девяностоградусного сдвига фаз и второго сигнала датчика или вычисляют разность фаз из первого сигнала датчика, второго сигнала датчика и второго девяностоградусного сдвига фаз.
27. Способ по п.24, отличающийся тем, что вычисляют одну или более характеристик из группы, состоящей из массового расхода, плотности и объемного расхода.
28. Способ по п.24, отличающийся тем, что вычисляют первый девяностоградусный сдвиг фаз и второй девяностоградусный сдвиг фаз с помощью преобразования Гилберта.
29. Способ обработки сигналов датчика в расходомере, заключающийся в том, что принимают первый сигнал датчика и второй сигнал датчика, отличающийся тем, что формируют первый сдвиг фаз на 90° из первого сигнала датчика и формируют второй сдвиг фаз на 90° из второго сигнала датчика, вычисляют частоту из первого сигнала датчика и первого девяностоградусного сдвига фаз или вычисляют частоту из второго сигнала датчика и второго девяностоградусного сдвига фаз, вычисляют одну или более характеристик из группы, состоящей из массового расхода, плотности и объемного расхода.
30. Способ по п.29, отличающийся тем, что дополнительно приводят к требуемым условиям первый сигнал датчика и второй сигнал датчика до этапа вычисления первого девяностоградусного сдвига фаз и второго девяностоградусного сдвига фаз.
31. Способ по п.29, отличающийся тем, что дополнительно вычисляют разность фаз из первого сигнала датчика, первого девяностоградусного сдвига фаз и второго сигнала датчика или вычисляют разность фаз из первого сигнала датчика, второго сигнала датчика и второго девяностоградусного сдвига фаз.
32. Способ по п.29, отличающийся тем, что вычисляют первый девяностоградусный сдвиг фаз и второй девяностоградусный сдвиг фаз с помощью преобразования Гилберта.
33. Способ обработки сигналов датчика в расходомере, заключающийся в том, что принимают первый сигнал датчика и второй сигнал датчика, отличающийся тем, что формируют первый сдвиг фаз на 90° из первого сигнала датчика и формируют второй сдвиг фаз на 90° из второго сигнала датчика, вычисляют частоту из первого сигнала датчика и первого девяностоградусного сдвига фаз или вычисляют частоту из второго сигнала датчика и второго девяностоградусного сдвига фаз, вычисляют разность фаз из первого сигнала датчика, первого девяностоградусного сдвига фаз и второго сигнала датчика или вычисляют разность фаз из первого сигнала датчика, второго сигнала датчика и второго девяностоградусного сдвига фаз, вычисляют одну или более характеристик из группы, состоящей из массового расхода, плотности и объемного расхода.
34. Способ по п.33, отличающийся тем, что дополнительно приводят к требуемым условиям первый сигнал датчика и второй сигнал датчика до этапа вычисления первого девяностоградусного сдвига фаз и второго девяностоградусного сдвига фаз.
35. Способ по п.33, отличающийся тем, что вычисляют первый девяностоградусный сдвиг фаз и второй девяностоградусный сдвиг фаз с помощью преобразования Гилберта.
| US 5578764 A, 26.11.1996 | |||
| WO 00/34748 A2, 15.06.2000 | |||
| US 5069074 A, 03.12.1991 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| МНОГОЧАСТОТНЫЙ ПРОЦЕССОР ЦИФРОВЫХ СИГНАЛОВ ДЛЯ ОБРАБОТКИ СИГНАЛОВ ДАТЧИКОВ, УСТАНАВЛИВАЕМЫХ НА ВИБРИРУЮЩИХ ТРУБКАХ | 2000 |
|
RU2234683C2 |

