Изобретение относится к радиотехнике, а именно к радиолокации, и может быть использовано для определения дальности и угловых координат воздушных целей. Предпочтительно его использование в легкомоторной авиации (ЛА) в качестве обзорного передней полусферы.
Во всем мире абсолютное большинство легкомоторных самолетов вместимостью 4-10 человек, включая пилота, не оборудованы радиолокаторами из-за больших габаритно-массовых характеристик (ГМХ) последних, особенно антенны, также в силу традиционности, что пилоты ЛА и без них прекрасно обходятся. В настоящее время в России, СНГ и других странах ЛА успешно развивается, следовательно, число самолетов и интенсивность воздушного движения резко возрастает, а потому требуется информация летчику за быстроменяющейся воздушной обстановкой во избежание столкновений, особенно в условиях плохой видимости.
Учитывая, что скорости полета в ЛА невелики, что-то в пределах 200-300 км/ч, то дальность действия таких радиолокаторов также невелика и лежит в пределах 15-30 км, что позволяет оценить воздушную обстановку и иметь запас времени, чтобы предпринять необходимые действия с целью построения маневра расхождения с встречным самолетом или вертолетом, уклонения от высоковольтных ЛЭП, вышек и т.д.
С другой стороны, бурное развитие микроэлектроники резко уменьшает ГМХ, что позволяет создать бортовое радиоэлектронное оборудование, например радиолокатор в приемлемых весах и габаритах для ЛА, т.е. решить задачу ближней радиолокации: определение дальности, взаимной скорости и угловых координат воздушной цели (по отношению к обзорному радиолокатору).
Известна система предупреждения столкновения воздушных судов TCD 8800, которая отслеживает до 50 целей, одновременно индицирует три наиболее опасных, а на индикаторе отражается барометрическая высота цели, разность высот, дистанция и т.д. (см. в Интернете: www.avion.ru.).
Недостатками данной системы является: каждое воздушное судно должно быть оборудовано автоответчиком, кроме того, эта система не отражает метеообстановку, радиолокационный рельеф местности.
Известен самолетный радиолокатор обзора воздушной обстановки передней полусферы, выполненный по классической схеме (по состоянию уровня техники конца шестидесятых годов) и имеющий следующие технические данные в режиме обзора: дальность обнаружения до 10 км, зона обнаружения по мах дальности по азимуту ±60+5°, по углу места (+26)-(14)°, время обзора зоны просмотра 1,33 с, разрешающая способность по дальности 250 м, по азимуту 5° (см. “Основы радиолокации и радиолокационное оборудование летательных аппаратов”, под ред. И.Л.Прагера, М., Машиностроение, 1967, с.232-246).
Недостатками данного радиолокатора являются: большие ГМХ, большая потребляемая мощность, невысокие технические характеристики, но большего нельзя и требовать, т.к. таков был тогда уровень техники.
Известен более современный многофункциональный радиолокатор “Гроза”, устанавливаемый практически на всех типах самолетов гражданской авиации России и СНГ, который предназначен для обнаружения метеообразований, для наблюдения радиолокационного изображения местности, лежащей перед самолетом, определения угла сноса и путевой скорости самолета на основе эффекта Доплера, а также для обзора передней полусферы.
Радиолокационная станция “Гроза” представляет собой импульсную РЛС со сканирующей в азимутальной плоскости антенной и секторным индикатором типа “дальность - азимут”. Основу схемы РЛС составляют структурные элементы, присущие любой импульсной станции: модулятор, передатчик, антенное устройство с блоком ее управления, антенный переключатель, приемник отраженных сигналов и индикатор.
Модулятор формирует импульсы запуска станции, которые подаются на передатчик. В передающем устройстве с помощью магнетрона создаются мощные СВЧ-импульсы, которые по форме и длительности совпадают с импульсами модулятора. Радиоимпульсы передатчика по волноводному тракту через антенный переключатель поступают в антенну, с помощью которой производится как излучение СВЧ-энергии в пространство, так и прием электромагнитных колебаний, отраженных от целей. Антенный переключатель в момент излучения радиоимпульсов автоматически подключает антенну к передающему, а при приеме отраженных сигналов соответственно к приемному устройству.
Отраженные от целей и принятые антенной радиоимпульсы поступают в приемник, где усиливаются, преобразуются и воспроизводятся в виде яркостных отметок на экране ЭЛТ.
Координация работы всех элементов станции во времени осуществляется импульсами синхронизации. Развертка луча на экране индикаторной ЭЛТ начинается одновременно с СВЧ-импульсами передатчика. Линия развертки перемещается по экрану синхронно с качанием антенны по азимуту. Благодаря этому на экране формируется радиолокационное изображение в системе координат “дальность - азимут”. Кроме того, импульсы синхронизации запускают устройство генерации меток дальности, создающих на экране ЭЛТ масштабные дуги дальности, по которым определяется наклонная дальность до радиолокационных целей (см. Глухов В.В. и др. Авиационное и радиоэлектронное оборудование летательных аппаратов. М., Транспорт, 1983, с.136-137).
Недостатками данного радиолокатора являются большие ГМХ, а антенна выполнена в виде параболоида вращения, которая не вписывается в фюзеляж самолетов ЛА из-за больших габаритов, большая потребляемая мощность, что критично для ЛА, большие габариты индикаторов и т.д. данный радиолокатор даже не помещается в габариты кокпита фюзеляжа.
Известен современный самолетный радиолокатор переднего обзора “Копье”, помещенный на внешнюю подвеску на штурмовике СУ-25, ранее радара не имеющего. Этот радиолокатор имеет задающий генератор, передатчик, приемник СВЧ, АЦП, процессор сигналов и процессор данных (см. ж. “Военный парад”, 2000, №4, с.30).
Недостатком этого радиолокатора, выполненного хотя и на современной элементной базе, являются большие габариты, особенно антенной решетки, которая выполнена в одном конструктиве, избыточность по выполняемым функциям, которые применяются только в боевых летательных аппаратах, т.е. его применения в ЛА практически не выгодно и даже не возможно.
Известен радиолокатор, который осуществляет однозначное определение дальности до целей и угловые координаты целей при промышленной частоте излучения импульсного генератора благодаря тому, что введены счетчик, дешифратор, четыре инвертора, четыре элемента совпадения, три линии задержки и преобразователь дальности, при этом выход синхронизатора соединен с первым входом первого элемента совпадения и через первый инвертор - с первым входом второго элемента совпадения, также выход синхронизатора, через последовательно включенные счетчик, дешифратор и второй инвертор соединен со вторым входом первого элемента совпадения, выход которого соединен с входом импульсного передатчика, выход дешифратора подключен через первую линию задержки к первому входу преобразователя дальности, выход которого соединен с третьим входом индикатора, второй вход преобразователя дальности подключен к выходу третьего элемента совпадения, первый вход которого соединен через вторую линию задержки с выходом второго элемента совпадения, а второй вход третьего элемента совпадения подключен к выходу четвертого элемента совпадения, первый вход которого соединен с выходом приемника, который соединен также с входом третьей линии задержки, выход которой соединен со вторым входом второго элемента совпадения и с входом третьего инвертора, выход которого подключен ко второму входу четвертого элемента совпадения, к тому же выход приемника соединен через четвертый инвертор с третьим входом второго элемента совпадения (см. патент РФ №2073883, прототип).
Недостатками прототипа являются:
- неоправданная сложность схемного решения, можно решить эту задачу значительно проще;
- антенная система также не оптимальна, имеет большие ГМХ, поэтому размещение данного радиолокатора на самолетах ЛА не представляется возможным.
Технической задачей изобретения является повышение эффективности применения за счет минимизации ГМХ радиолокатора; низкого уровня потребляемой мощности; низкой стоимости аппаратных средств; технологической прозрачности; коммерческой жизнеспособности; применения высокой технологии в тракте СВЧ (на микрополосковых линиях (МПЛ)).
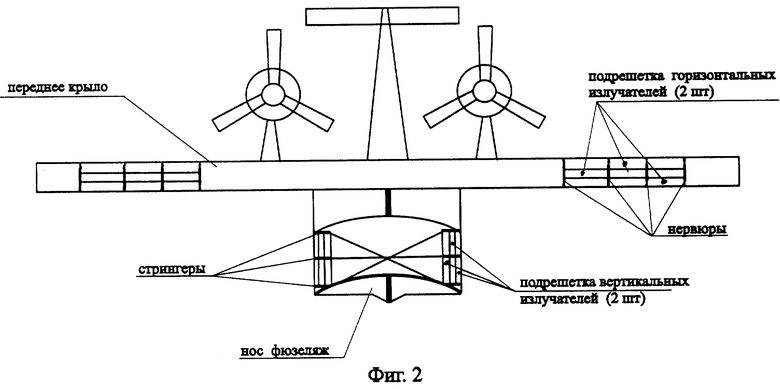
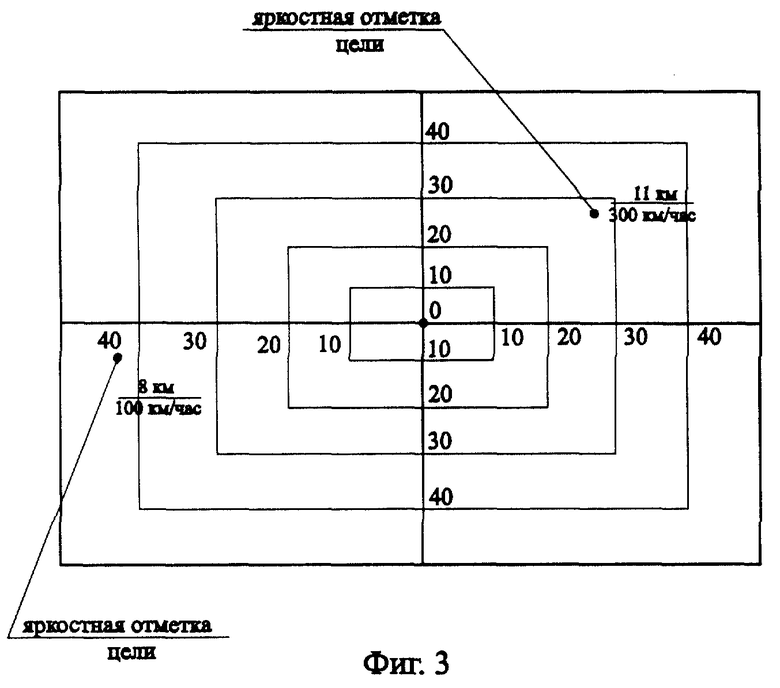
Для решения поставленной задачи предлагается импульсный когерентный радиолокатор, содержащий фазированную антенную решетку, приемопередатчик, фазовый коммутатор, циркулятор и индикатор, отличающийся тем, что он содержит электронные блоки управления диаграммой направленности, число которых равно числу излучателей, причем каждый электронный блок управления содержит излучатель, фазовый коммутатор, ферритовый циркулятор, первый автогенератор и малошумящий усилитель, также радиолокатор содержит общую часть, в которую входят сумматор, второй автогенератор, микроконтроллер, приемник и жидкокристаллический индикатор, а радиолокатор имеет следующие соединения: каждый излучатель первой шины входа/выхода соединен с фазовым коммутатором, который второй шиной входа/выхода соединен с ферритовым циркулятором, сигнальный вход которого соединен с выходом первого автогенератора, а выход ферритового циркулятора через малошумящий усилитель является выходом электронного блока управления диаграммой направленности на прием, выходы всех малошумящих усилителей 1-N соединены с входом сумматора, выход которого через приемник соединен с жидкокристаллическим дисплеем, который является выходом радиолокатора, микроконтроллер первой четырехразрядной шиной управления соединен с управляющими входами фазовых коммутаторов, третьей управляющей шиной - с управляющими входами ферритовых циркуляторов и второго автогенератора, четвертой управляющей шиной - с управляющими входами приемника и жидкокристаллического дисплея, выход второго автогенератора второй управляющей шиной соединен с первыми автогенераторами; излучатели ФАР, образующие диаграмму направленности (ДН) в горизонтальной плоскости, размещены в двух подрешетках в передней кромке крыла между нервюрами, причем плоскость каждого излучателя расположена параллельно плоскости крыла; в вертикальной плоскости, размещены в двух подрешетках носовой части фюзеляжа в две вертикальные линии между стрингерами, причем плоскость каждого излучателя расположена перпендикулярно плоскости крыла; в качестве индикатора РЛС применен жидкокристаллический дисплей, причем яркостная отметка от цели по оси абцисс от центра дисплея показывает азимутальный угол, а по оси ординат - угол места, дальность до цели, скорость сближения высвечивается цифрами над яркостной отметкой.
На фиг.1 изображена структурная схема радиолокатора; на фиг.2 - пример размещения излучателей ФАР; на фиг.3 - вид ЖКИ с отметками двух целей.
На фиг.1 изображено: 1-N - электронные блоки управления ДН; 2 - излучатель; 3 - фазовый коммутатор (ФК); 4 - первый автогенератор (АГ); 5 - ферритовый циркулятор (ФЦ); 6 - малошумящий усилитель (МШУ); 7 - сумматор; 8 - второй AT; 9 - микроконтроллер (МК); 10 - приемник; 11 - жидкокристаллический индикатор (ЖКИ); первая и вторая шины входа/выхода; четыре шины управления и синхронизации.
Излучатель 2 соединен с ФК 3 первой шиной входа/выхода, а ФК 3 соединен с ФЦ 5 второй шиной входа/выхода, выход первого автогенератора 4 соединен с сигнальным входом ФЦ 5, выход которого через МШУ 6 соединен со входом сумматора 7 как и выходы всех других МШУ электронных блоков управления 2-N; выход сумматора 7 соединен с приемником 10, выход которого соединен с ЖКИ 11; МК 9 первой 4-разрядной шиной управления соединен со всеми фазовыми коммутаторами электронных блоков управления ДН 1-N, третьей шиной управления - с ФЦ 5 и вторым АГ 8, четвертой шиной управления - с приемником 10 ЖКИ 11, а выход второго АГ 8 соединен со всеми автогенераторами электронных блоков управления ДН 1-N второй шиной управления.
Указанные узлы и блоки радиолокатора могут быть выполнены на следующих электро- и радиоэлементах: излучатели 2 - на печатных излучателях, см. Антенны и устройства СВЧ, под ред. Д.И.Воскресенского, М, Р и С, 1994, с.51-52; вибратор на МПЛ, ферритовые циркуляры 5 по схеме, см. Антенны и устройства СВЧ, под ред. Д.И.Воскресенского, М, Р и С, 1994, с.329-333; фазовый коммутатор 3 - на p-i-n-диодах с использованием микрополосковых линий (МПЛ), см. Микроэлектронные устройства СВЧ, под ред. Г.Н.Веселова, М., Высшая школа, 1988, с.76-78; МШУ 6 - см. Микроэлектронные устройства СВЧ, под ред. Г.Н.Веселова, М., Высшая школа, 1988, с.173, 201, 225; сумматор 7 - например, по схеме сложения на направленных ответвлениях, см. Микроэлектронные устройства СВЧ, под ред. Г.Н.Веселова. М., Высшая школа, 1988, с.73-75; автогенераторы 8 и 4 - на микрополосковых генераторах с диодом Гаина, см. Микроэлектронные устройства СВЧ, под ред. Г.Н.Веселова, М., Высшая школа, 1988, с.158-160; приемник 10 - это обычный приемник РЛС, обеспечивающий высокую когерентность сигналов с синхронным детектором, см. Теоретические основы радиолокации, под ред. В.Е.Дулевича. М., Сов. Радио, 1978, с.79-81; ЖКИ 11 - фирмы POWERTYPPG-12864A 128 х 64 точки с подсветкой, см. Aktiv-Matrix-LCD's LDE052T-12 320 × 40 5,1 N 46029, TECHNISCHER KATALOG 96/97 г., фирмы Setron, с.466 38032, Brauschweig, Germany; MK9 - это, например, микропроцессор фирмы Jntel 80C 188 ЕС-16, см Каталог “Сектор электронных компонентов. Россия-99”, М., ДОДЕКА, 1999, с.487.
Радиолокатор работает следующим образом. Микроконтроллер 9 определяет все временные соотношения работы радиолокатора в целом и его частей между собой. По третьей шине управления подается сигнал на запуск второго автогенератора 8, который вырабатывает запускающий импульс общей фазы. По этому импульсу запускается первый автогенератор 4, который вырабатывает частоту заполнения запускающего импульса. Одновременно ферритовый циркулятор 5 переключается в режим “передача” и радиоимпульс по второй шине вход/выход поступает на фазовый коммутатор 3, который назначает фазу передающего сигнала в соответствии с кодом, поступающим по первой шине управления, начиная с нулевой фазы и далее через 22,5° по всем 1-N электронным блокам управления ДП вначале в горизонтальной плоскости, а затем в вертикальной. После каждого передающего импульса фазовый коммутатор и ферритовый циркулятор переключается на “прием” и отраженный импульс от цели (в силу принципа обратимости) поступает на МШУ 6,затем суммируется с отраженными импульсами с других электронных блоков управления ДН 2-N, обрабатывается в приемнике 10 и поступает на ЖКИ 11, где высвечивается в виде яркостной отметки (одной или несколько). Следует заметить, что в ЖКИ 11 применена растровая развертка, т.е. нет режима сопровождения цели (целей), а только обнаружение с указанием дальности до цели и взаимной скорости сближения (удаления). Эти цифровые данные: угол места, угол азимута, дальность и скорость определяются микроконтроллером 9 или микроконтроллером, который находится в ЖКИ 11 (современные ЖКИ для удобства отображения информации выпускаются со встроенными МК).
Антенная система состоит из двух подрешеток: одна в горизонтальной плоскости, другая - в вертикальной, излучатели выполнены в виде отрезков печатных проводников, размерами при λ=3 см.
В данной заявке найден оптимальный вариант антенной системы с учетом имеющихся возможностей ее размещения и условий работы всей системы. Оптимизация состоит в приближении значений реализуемых характеристик к предельно допустимым, найденным для выбранных критериев оптимальности, такими как мах коэффициент усиления антенн в секторе сканирования и т.д.
На фиг.2 показано размещение электронных модулей управления диаграммой направленности в крыле (горизонтальная развертка) и в носу фюзеляжа (вертикальная развертка); собственно ядро радиолокатора (сумматор, второй автогенератор, микроконтроллер, приемник) выполнено в виде отдельного законченного конструктива и может быть расположено за приборной панелью или рядом, а ЖКИ непосредственно на приборной панели. Возможен вариант расположения электронных модулей управления диаграммой направленности в виде двух подрешеток только в носовой части фюзеляжа, т.к. габариты каждой подрешетки имеют площадь 20 × 40 и глубину 15 (все размеры даны в см) при λ=3 см. При применении других длин волн размеры могут быть естественно другие.
Примерные данные предлагаемого радиолокатора при дальности 12-15 км следующие: мощность в импульсе менее 100 Вт, τ имп = 100 мкс (перестройка во времени), Fповт = 10 кГц, ширина диаграммы направленности (ДН) каждого излучателя ≈45°, общая ДН не менее 5° по вертикали и горизонтали, число излучателей при этом в каждой подрешетке равно 9, сложение мощностей излучателей пространственное.
Построение конструктива по предложенному способу, т.е. совмещение по месту вибратора и электронного блока управления антенны (на МПЛ) позволяет рассосредоточить ФАР, что приводит к резкому снижению ГМХ при более чем приемлемых технических характеристиках.
Данное построение радиолокатора может быть использовано и на более тяжелых машинах, например Бе-103 и даже на боевых, например на том же Су-25 с увеличением числа боевых функций.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР ДЛЯ ЛЕГКОМОТОРНОГО САМОЛЕТА | 2002 |
|
RU2258244C2 |
| РАДИОЛОКАТОР ДЛЯ ЛЕГКОМОТОРНОГО САМОЛЕТА | 2009 |
|
RU2390795C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РАДИОЛОКАТОР | 2004 |
|
RU2280264C2 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| АНТЕННАЯ СИСТЕМА МЕТЕОЛОКАТОРА | 2000 |
|
RU2161847C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| СОВМЕЩЕННАЯ СИСТЕМА РАДИОЛОКАЦИИ И СВЯЗИ НА РАДИОФОТОННЫХ ЭЛЕМЕНТАХ | 2018 |
|
RU2697389C1 |
| НЕПОДВИЖНАЯ АНТЕННА ДЛЯ РАДИОЛОКАТОРА КРУГОВОГО ОБЗОРА И СОПРОВОЖДЕНИЯ | 2008 |
|
RU2389111C1 |
| РАДИОЛОКАЦИОННО-ТОМОГРАФИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРОВЫХ ПОТОКОВ | 2023 |
|
RU2805031C1 |
Изобретение может быть использовано для определения дальности и угловых координат воздушных целей. Техническим результатом изобретения является повышение эффективности применения за счет минимизации габаритно-массовых характеристик (ГМХ) радиолокатора, низкого уровня потребляемой мощности, низкой стоимости аппаратных средств. Для решения поставленной задачи предлагается импульсный когерентный радиолокатор, содержащий фазированную антенную решетку, приемопередатчик, фазовый коммутатор, циркулятор и индикатор, отличающийся тем, что он содержит электронные блоки управления диаграммой направленности, число которых равно числу излучателей, причем каждый электронный блок управления содержит излучатель, фазовый коммутатор, ферритовый циркулятор, первый автогенератор и малошумящий усилитель, также радиолокатор содержит общую часть, в которую входят сумматор, второй автогенератор, микроконтроллер, приемник и жидкокристаллический индикатор, а радиолокатор имеет следующие соединения: каждый излучатель первой шины входа/выхода соединен с фазовым коммутатором, который второй шиной входа/выхода соединен с ферритовым циркулятором, сигнальный вход которого соединен с выходом первого автогенератора, а выход ферритового циркулятора через малошумящий усилитель является выходом электронного блока управления диаграммой направленности на прием, выходы всех малошумящих усилителей 1-N соединены с входом сумматора, выход которого через приемник соединен с жидкокристаллическим дисплеем, который является выходом радиолокатора, микроконтроллер первой четырехразрядной шиной управления соединен с управляющими входами фазовых коммутаторов, третьей управляющей шиной - с управляющими входами ферритовых циркуляторов и второго автогенератора, четвертой управляющей шиной - с управляющими входами приемника и жидкокристаллического дисплея, выход второго автогенератора второй управляющей шиной соединен с первыми автогенераторами; излучатели ФАР, образующие диаграмму направленности (ДН) в горизонтальной плоскости, размещены в двух подрешетках в передней кромке крыла между нервюрами, причем плоскость каждого излучателя расположена параллельно плоскости крыла; в вертикальной плоскости размещены в двух подрешетках носовой части фюзеляжа в две вертикальные линии между стрингерами, причем плоскость каждого излучателя расположена перпендикулярно плоскости крыла, при этом яркостная отметка от цели по оси абцисс от центра дисплея показывает азимутальный угол, а по оси ординат - угол места, дальность до цели, скорость сближения высвечивается цифрами над яркостной отметкой. 3 з.п. ф-лы, 3 ил.

| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| РАДИОЛОКАТОР | 2000 |
|
RU2178185C2 |
| US 5874917 А, 23.02.1999 | |||
| Сошник пневматической сеялки | 1973 |
|
SU490423A1 |
| СПОСОБ ОПТИМАЛЬНОГО ДОСТУПА К АБДОМИНАЛЬНОМУ ОТДЕЛУ ПИЩЕВОДА ИММУНОДЕФИЦИТНЫХ МЫШЕЙ ПРИ ОРТОТОПИЧЕСКОЙ ТРАНСПЛАНТАЦИИ ФРАГМЕНТА ОПУХОЛИ ПИЩЕВОДА ЧЕЛОВЕКА | 2018 |
|
RU2709835C1 |

