Изобретение относится к радиолокации и может быть использовано для дистанционного зондирования атмосферы, в частности измерение скорости, направления и турбулентности ветра в заданном объеме вертикально-горизонтальном профиля.
В последнее время возросла необходимость в исследовании нижних слоев атмосферы. В ней сосредоточены более 4,5 массы атмосферного воздуха, сильно развиты турбулентность и конвенция, сосредоточена основная часть водяного пара, возникают облака, развиваются циклоны и антициклоны. Изучение этих явлений позволит повысить точность предсказания погоды.
Методы решения обозначенных проблем могут быть различными:
- аэрологическое зондирование
- метеорологическая радиолокация
- лазерная локация
- акустическая локация
- радиоакустическое зондирование
- профайлерная локация
Каждый из них имеет свои достоинства и недостатки, но главный недостаток -это измерение ветровых потоков только по дискретам измерения, например, через 100-200-300 и т.д. метров высоты, т.е. расстояние между дискретами велики, а значит нет полного, как в томографии объемного измерения.
Радиолокационные наблюдения и измерения, основанные на рассеянии радиоволн гидрометеорами, диэлектрическими неоднородностями воздуха, сопутствующими атмосферным явлениям, частицами аэрозоля, широко применяются в метеорологии. В последние годы все большее применение находят радиолокаторы «ясного» неба с узкими вертикально направленными диаграммами для измерения высотного распределения (профиля) параметров ветра в тропосфере.
В отличие от контактных методов, дистанционное зондирование позволяет оценивать физический параметр среды, основываясь на теории, связывающей этот параметр с некоторым измеряемым параметром, применительно к задаче оценки скорости ветра измеряемым параметром могут стать свойства рассеянных в турбулентной атмосфере радиосигналов. Атмосферный пограничный слой (АПС) характеризуется постоянно флуктуирующими в пространстве и во времени температурой, влажностью и давлением. При этом возникают неоднородности коэффициента преломления. Размеры этих неоднородностей от нескольких сантиметров до десятков дециметров, таким образом, согласно условию Брэгга, в обратном направлении наиболее эффективно рассеиваются радиоволны УВЧ диапазона. Неоднородности движутся в пространстве с некоторой средней скоростью (скоростью ветра), а также имеют случайную (турбулентную) составляющую. При облучении неоднородностей передающей антенной на поверхности земли образуется случайная дифракционная картина (ДК), что является дополнительной ошибкой измерения.
Известны способы измерения скорости ветра, основанные на принципе доплеровского радиолокатора, см. патент РФ №246091. Этот способ очень сложен: требует дополнительно к доплеровскому радиолокатору двух радиолокационных радиозондовых метеокомплексов.
В настоящее время в зарубежных странах широко используются так называемые «профайлеры» - радиолокаторы профилей ветра (РПВ), особенно на космодромах и аэродромах для метеообеспечения пусков ракет и полетов самолетов, технические решения которых защищены патентами, например №№4481514, 4445120, 5686919, 5689444 все США, 2008014832 Япония. Все они имеют свои особенности (достоинства) и недостатки.
Основным недостатком данных решений является большая погрешность измерения до 5 м/сек и выше, а по требованиям Роскосмоса погрешность измерения не должна превышать 0,5 м/сек. Известен патент РФ на полезную модель, см. №103936 от 15.10.2010, в которое входят передающее устройство, циркулятор, антенна, синтезатор частот, приемное устройство, синхронизатор, вычислитель, механизм вращения, малошумящий усилитель; эта метеорологическая радиолокационная станция осуществляет дистанционное измерение параметров ветра в миллиметровом диапазоне, вычисление и восстановление профилей ветра в реальном масштабе времени.
Недостатки:
- механическое сканирование антенны;
- большая погрешность измерения до 5-10 м/сек;
- ограниченный диапазон по высоте, всего до 4000 м.
Также известен способ определения вертикального профиля ветра в атмосфере см. патент РФ №2585793.
Способ включает в себя излучение приемопередатчиком длинных когерентных импульсов, регистрацию отраженного сигнала, получение доплеровского сигнала на различных высотах в различных направлениях зондирования. Уточнение профиля скорости ветра в пределах длинного участка проводят с учетом полной формы доплеровских спектров по двум или нескольким направлениям зондирования, в которых ширина спектра максимальна и с учетом закона ослабления принимаемой мощности от расстояния до приемопередатчика. Технический результат заключается в повышении чувствительности измерительной системы.
Недостатком этого способа является большая техническая сложность в его практической реализации, а технический результат «повышение чувствительности» вызывает сомнения, также существенным недостатком является применение одной антенны с механическим сканированием.
Наиболее близким техническим решением является профайлер фирмы Radarmeteo Италия «Radar Wind Profiler» см. www.radarmeteo.com, в котором применена антенная система, измеряющая пять электромагнитных волн по пяти направлениям зондирования: вертикальном и четырех направлениях отличных от вертикального и ориентированных на четыре стороны света N-S-E-W под фиксированными углами относительно вертикального направления в трех плоскостях по высоте: на низких высотах это 1-3 км, на средних 3-7 км, на высоких до 10-12 км.
Недостатки: для каждой высоты требуется своя частота 800-1500 МГц (низкий режим), 400-500 МГц (высокий режим), также для каждой высоты требуется своя апертура антенн, все это приводит к значительному усложнению как системной части, так и программного обеспечения. В реальности для этого выпускается три вида антенн: для высот 1-3 км раскрыв антенна размер 3 × 3 м, для самых больших высот 10 × 10 м, что приводит к расширению антенного поля профайлеров.
Технической задачей предлагаемого изобретения является повышение точности измерений параметров ветра по всему заданному вертикально-горизонтальному профилю атмосферы.
Технический результат достигается за счет построения системы на аппаратно-программном принципе корреляционной обработки отраженных от метеообразований атмосферы информационных сигналов, а также специального ПО на основе математической обработки так называемого метода «дрейфа» временного накопления (интегрирования во времени) измеряемых сигналов на каждом дискрете квантования высоты и по всему заданному объему.
Для решения поставленной задачи предлагается радиолокационно-томографическая система измерения параметров ветровых потоков, характеризующаяся тем, что содержит один задающий и N-приемных каналов, где N≥3, вычислитель корреляционных задержек, вычислитель скорости ветра и томографии ветра со следующими соединениями: зондирующий выход задающего канала связан с метеообразованиями атмосферы, выходы отраженных сигналов от них связаны с входами всех приемных каналов, выходы которых соединены с вычислителем корреляционных задержек, выходы последнего через магистральную шину соединены с входами вычислителя скорости ветра и томографии объема ветра. Конструктив системы по п.п. 1 и 2, характеризующийся тем, что приемные блоки при N каналов = 3 расположены в вершинах треугольника, стороны которого имеют длину 1 м, в центре этого треугольника расположен задающий модуль, вычислитель скорости ветра и томографии объема ветра расположены в одном любом приемном блоке, причем задающий и приемные каналы расположены параллельно плоскости земной поверхности, а диаграмма направленности-ДН антенны зондирующего луча направлена перпендикулярно ее плоскости, а ДН антенн всех трех приемных каналов направлены под углами 15-20° относительно зондирующему лучу, причем по географическим координатам они расположены следующим образом: первый приемный блок ориентирован на Nord, второй на West, третий на Ost.
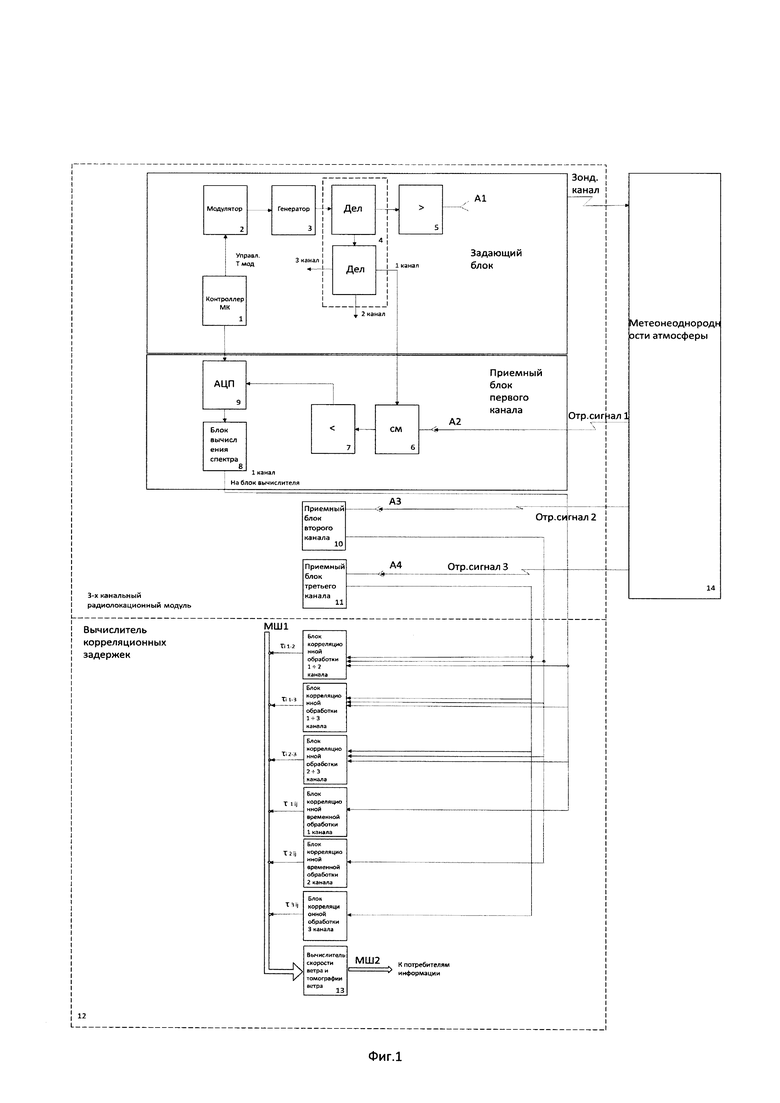
На фиг. 1 показана укрупненная структурная схема системы, которая содержит трехканальный радиолокационный модуль, состоящий из задающего блока, трех приемных блоков, вычислитель корреляционных задержек и вычислитель ветровых параметров, причем выходы всех приемных модулей соединены с входами вычислителя корреляционных задержек, выходы которых соединены с вычислителем скорости и томографии ветра, магистральная шина МШ является выходом системы. Задающий блок содержит:
1 - микроконтроллер (МК)
2 - модулятор
3 - генератор зондирующей частоты
4 - направленный ответвитель на одну и три позиции
5 - антенный усилитель мощности
А1 - зондирующая антенна
Каждый приемный блок содержит:
6 - смеситель
7 - усилитель
8 - блок вычисления спектра
9 - блок аналоговых-цифровых преобразователей (АЦП)
А2 - приемная антенна первого канала
Далее полная схема системы содержит:
10 - второй приемный блок с приемной антенной A3
11 - третий приемный блок с приемной антенной А4
12 - вычислитель корреляционных задержек
13 - вычислитель скорости, направления и томографии заданного объема ветра
14 - неоднородности атмосферы (метеообразования)
МШ1 и МШ2 - магистральные шины
Задающий блок имеет следующие соединения:
МК1 через модулятор 2 соединен с генератором 3, выход которого через направленный ответвитель одной позиции 4 и далее через усилитель мощности 5 соединен с излучаемой антенной А1, а тремя выходами направленный ответвитель 4 соединен также с вторым и третьим приемными блоками. Первый приемный блок имеет следующие соединения: АЦП 9 управляющим входом соединен с выходом МК1 (из задающего блока), выход приемной антенны А2 соединен с усилителем 6, выход которого соединен с сигнальным входом АЦП, выход которого через блок вычисления спектра 8 соединен с измерительными входами вычислителей корреляционной обработки 12. Второй и третий приемные блоки имеют такой же состав и соединения.
Система работает следующим образом.
Зондирующий (задающий) блок системы выполнен по классической схеме импульсного РЛС, но можно применить и непрерывные сигналы с линейно-частотной модуляцией и других модуляций: это не принципиально, но в других случаях это приводит к усложнению СПО и ГМХ, приемные блоки системы также выполнены по классической схеме приема отраженных сигналов с выделением частоты биений в заданном канале измерения по высоте между зондирующих и отраженными сигналами, на каждом дискрете высоты измерения, затем преобразованием в цифровую форму на АЦП и далее вычисление спектра каждого измерения с проведением корреляционной временной обработки каждого канала зондирующим и отраженным сигналам на каждом канале, параллельно проводят корреляционную обработку между отраженными между каждыми каналами и по полученным данным вычисляют ветровые параметры по следующим формулам:
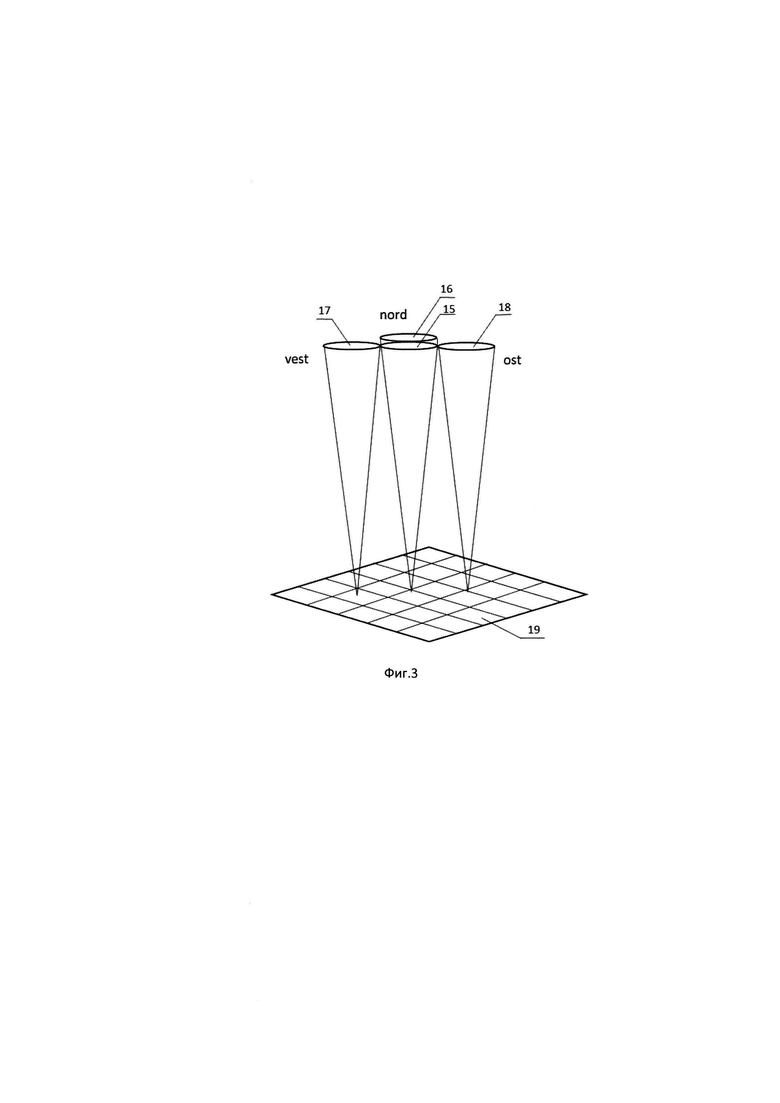
На фиг. 3 показан принцип измерения направления и скорости ветра РПВ на основе фазированной антенной решетки (ФАР) с электронным сканированием диаграммы направленности (ДН), на которой изображено:
15 - диаграмма направленности зондирующего канала
16 - ДН первого приемного канала (nord)
17 - ДН второго приемного канала (vest)
18 - ДН третьего приемного канала (ost)
19 - фазированная антенная решетка
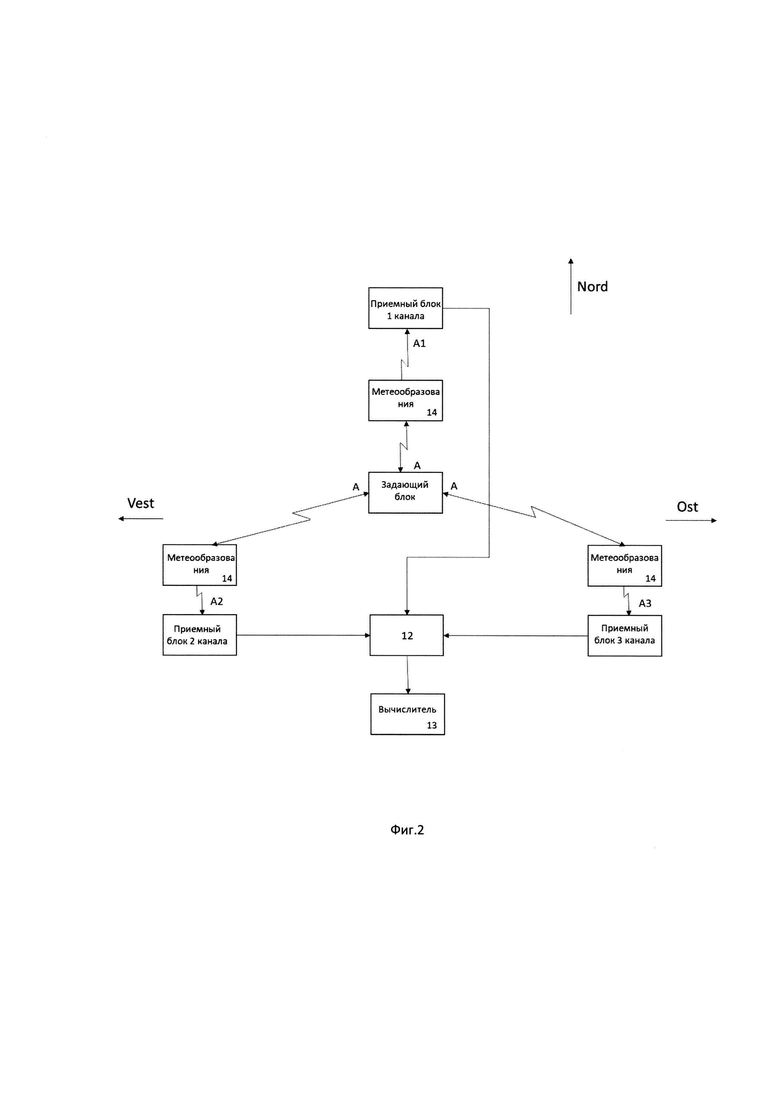
На фиг. 2 показана структурная схема системы, содержащая задающий блок, три приемных блока в одном конструктиве, включая вычислитель корреляционных задержек 12 и вычислитель скорости ветра и томографии ветра 13, также в схему входят метеообразования 14, зондирующая антенна А1, и три приемных антенны, А2, A3 и А4. Фазированная антенная решетка (ФАР) 19 расположена таким образом, что диаграмма направленности (ДН) первого приемного канала ориентирована на Nord, второго канала - на Vest, третьего канала - на Ost. На чертеже и в описании показана система, состоящая из трех приемных каналов, но можно применить и большее число (в зависимости от сложности измерения ветровых потоков). Привязка приемных каналов к сторонам света нужна для вычисления направления ветра.
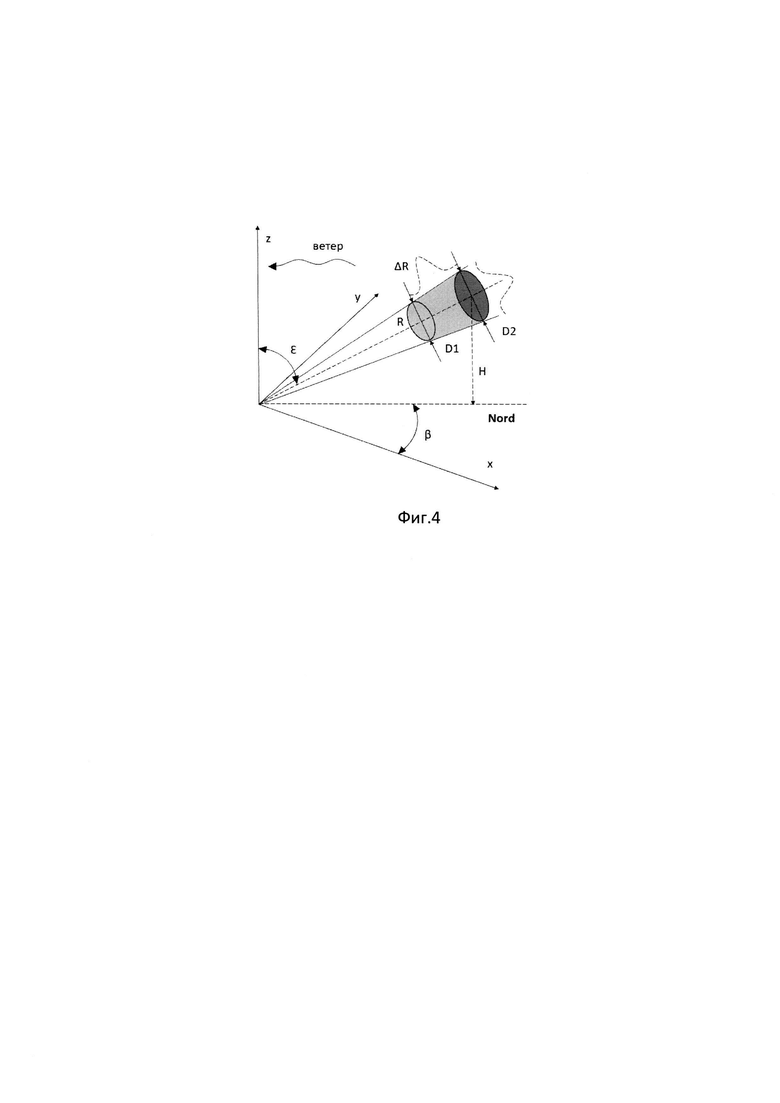
На фиг. 4 показана схема формирования отраженного сигнала от объема метеорологических неоднородностей, где:
х, у, z - система координат
R - расстояние от РЛС до цели
D1, D2 - диаметры объема измерения в телесном угле
ΔR - дискрет квантования
Н - высота телесного угла
ε - угол места
В - угол азимута
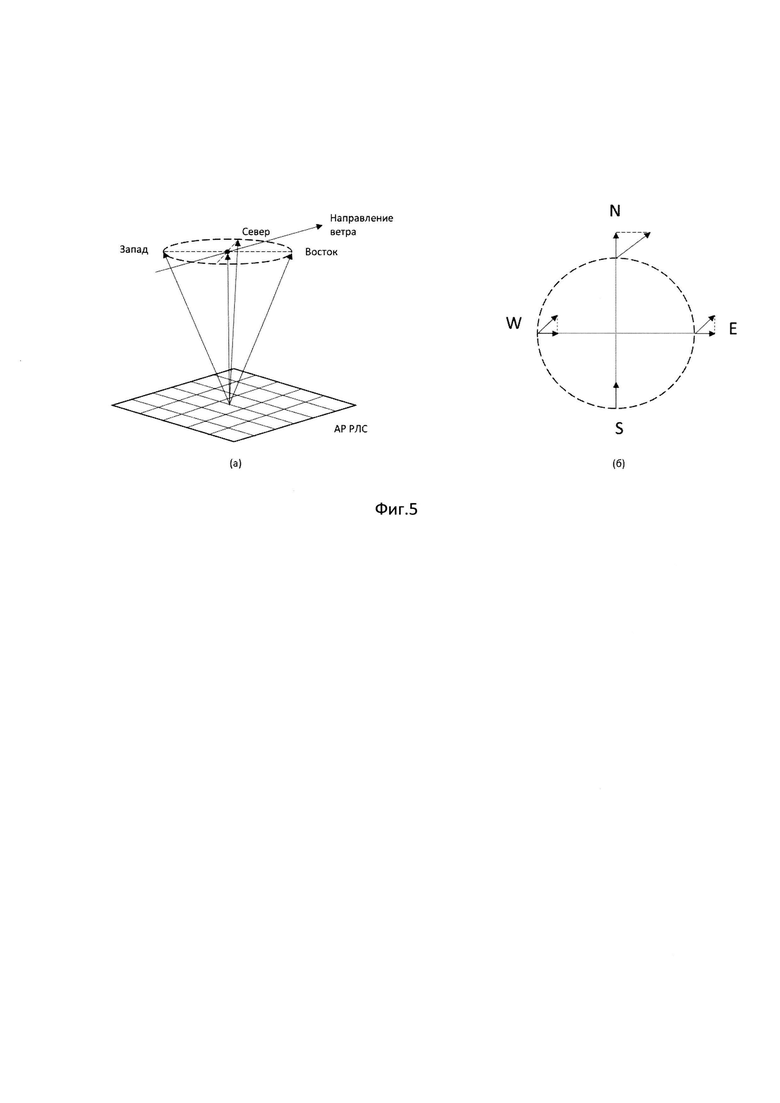
На фиг. 5 показана схема осуществления зондирования для определения направления ветра.
Необходимо отметить некоторые особенности оценки погрешности измерения параметров ветра.
Точность измерений параметров ветра и турбулентности в значительной мере будет зависеть от энергетического потенциала радиолокатора - соотношение сигнал/шум и особенностей обработки сигнала. Достоверность измерений при этом для устранения информации о помехах будет определяться методиками статистической обработки данных.
С другой стороны, оценить разрешение по скорости и дальности можно с помощью известных соотношений:
Где ΔVB - разрешение по скорости; Δτи - длительность радиоимпульсов; λ - длина волны.
Разрешение по скорости увеличивается по мере уменьшения длительности радиоимпульсов. Но при этом ухудшается разрешение по дальности равное ΔR=сΔτи/2. В результате, разрешение по дальности и скорости связаны соотношением неопределенностей:
где ΔR - разрешение по дальности, с - скорость света.
Приведенные результаты необходимо учитывать при разработке требований к РПВ.
Для повышения уровня отраженного сигнала осуществляется процедура когерентного накопления информации и последующая цифровая обработка.
Поскольку уровень сигналов близок или на 10-25 дБ ниже уровня шумов, то необходимо максимально повышать чувствительность приемников и излучать мощности близкие к предельно возможным. Оценки показывают, что минимальное значение средней излучаемой мощности Р, умноженной на площадь антенной системы S желательно довести до уровня P*S≥105 Вт*м2.
Отраженный сигнал формируется объемом зондирования, который определяется шириной диаграммы направленности антенны и длительностью радиоимпульса. Прием отраженного сигнала осуществляется путем усреднения по времени в исследуемом интервале высот. Прием слабого отраженного сигнала производится путем когерентным накоплением энергии в течение длительного времени.
В основу работы системы положен следующий принцип.
Задающий канал генерирует зондирующие сигналы, которые отражаются от метеообразований и принимаются по трем приемным каналам, причем диаграмма направленности (ДН) зондирующего канала направлена строго перпендикулярно антенному полю ФАР, а ДН 3-х приемных каналов ориентирована по сторонам света: север, запад, восток под углом ≅15° относительно зондирующего канала. Принятый отраженный сигнал (в каждом приемном канале) смешивается на смесителе с зондирующим сигналом, после чего усиливается и этот сигнал биений поступает на АЦП, где оцифровывается и поступает на блок вычисления спектра (быстрое преобразование Фурье) и поступает на блок корреляционной обработки, где определяется т задержки каждого канала; одновременно по всем трем приемным каналам определяется τ задержки между всеми этими каналами. Зная все эти задержки вычисляем скорость ветра и томографию ветра в каждом сечении (дискрете) квантования. Величина дискрета квантования принимается заранее и записывается в СПО, например, через 300 или 400 или 500 метров и т.д. Также зная полученные данные строится по методу «дрейфа» томографическая картина распределения ветровых потоков в измеряемом объеме наблюдения.
Тогда вычисление вертикальной составляющей скорости ветра определяется выражением:
 где
где
а горизонтальной составляющей - выражением:
 где
где
d1 - расстояние, на котором разнесены фазовые центры первой и второй антенн (каналов);
τз1 - значение аргумента производной первой взаимной корреляционной функции, при котором производная принимает наименьшее значение;
d2 - расстояние между двумя фазовыми центрами первой и третьей антенны по высоте;
τз2 - значение аргумента производной второй взаимной корреляционной функции, при котором производная принимает наименьшее значение.
Эти вычисления обеспечивает по СПО цифровой специальный процессор, расположенный в вычислителе 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ КОНТРОЛЯ БЕТОННЫХ СООРУЖЕНИЙ | 2023 |
|
RU2805032C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВЕТРА | 2015 |
|
RU2604169C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВЕТРА НА ОСНОВЕ ЭФФЕКТА ДОПЛЕРА | 2015 |
|
RU2602730C1 |
| СПОСОБ ТРЕХМЕРНОЙ ПУТЕВОЙ НАВИГАЦИИ В АВТОМАТИЗИРОВАННОЙ ПОМОЩИ УПРАВЛЕНИЕМ ГРУЗО-ПОДЪЕМНО-ТРАНСПОРТНЫМИ МЕХАНИЗМАМИ | 2018 |
|
RU2727325C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2824842C1 |
| РАДИОВЫСОТОМЕРНАЯ СИСТЕМА С АДАПТАЦИЕЙ К ГЛАДКОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2605442C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЖИДКОСТНОГО ПОТОКА | 2023 |
|
RU2830296C2 |
Изобретение относится к радиолокации и может быть использовано для дистанционного зондирования атмосферы, в частности для измерения скорости, направления и турбулентности ветра в заданном объеме вертикально-горизонтального профиля. Технический результат – повышение точности измерений параметров ветра по всему заданному вертикально-горизонтальному профилю атмосферы. Сущность изобретения заключается в том, что осуществляют построение системы на аппаратно-программном принципе корреляционной обработки отраженных от метеообразований атмосферы информационных сигналов, а также специального ПО на основе математической обработки так называемого метода «дрейфа» временного накопления (интегрирования во времени) измеряемых сигналов на каждом дискрете квантования высоты и по всему заданному объему. 1 з.п. ф-лы, 5 ил.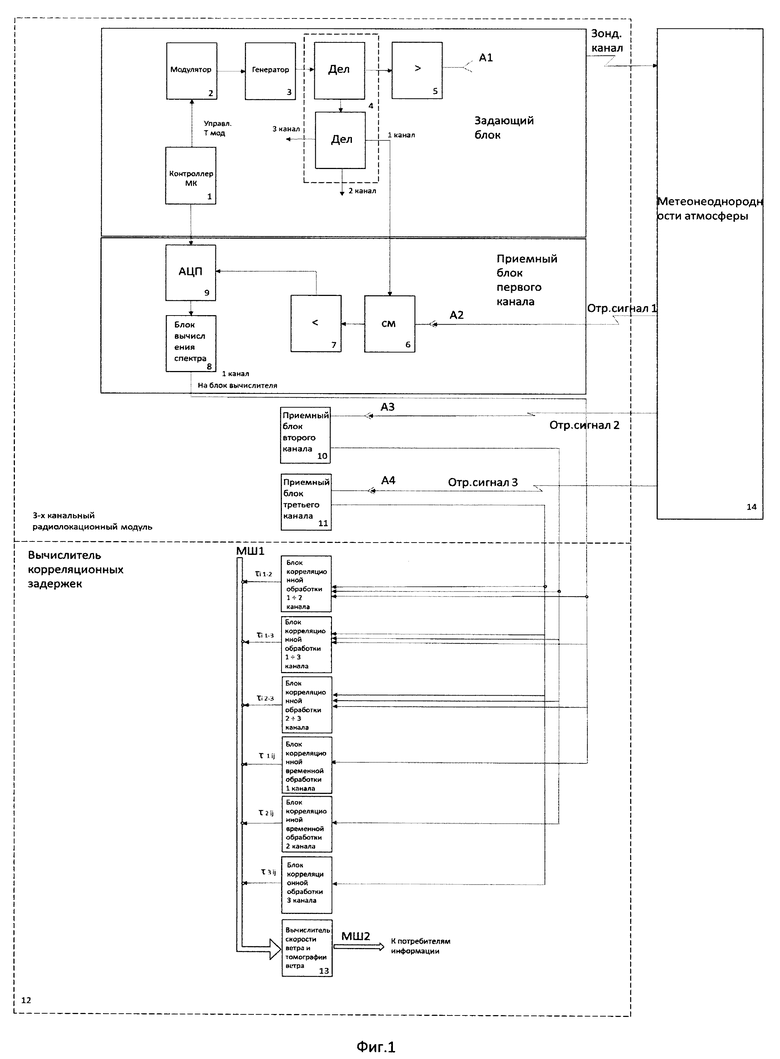
1. Радиолокационно-томографическая система измерения параметров ветровых потоков, основанная на посылке радиолокационных зондирующих сигналов и приеме ответных сигналов, отраженных от метеообразований атмосферы, характеризующаяся тем, что содержит один задающий и N-приемных каналов, где N≥3, вычислитель корреляционных задержек, вычислитель скорости, направления и томографии заданного объема ветра со следующими соединениями: зондирующий выход задающего канала связан с метеообразованиями атмосферы, выходы отраженных от них сигналов связаны с входами всех приемных каналов, выходы которых соединены с вычислителем корреляционных задержек, выходы последнего через магистральную шину соединены с входами вычислителя скорости и направления ветра и томографии заданного объема ветра.
2. Система по п. 1, характеризующаяся тем, что приемные блоки при N каналов = 3 расположены в вершинах правильного треугольника, стороны которого имеют длину 1 м, в центре этого треугольника расположен задающий модуль, вычислитель скорости ветра и томографии объема ветра расположен в одном любом приемном блоке, причем задающий и приемные каналы расположены параллельно плоскости земной поверхности, а диаграмма направленности - ДН антенны зондирующего луча направлена перпендикулярно ее плоскости, а ДН антенн всех трех приемных каналов направлены под углами 15-20° относительно зондирующего луча, причем по географическим координатам они расположены следующим образом: первый приемный блок ориентирован на Nord, второй на West, третий на Ost.
| СПОСОБ ИЗМЕРЕНИЯ ПОЛЯ СКОРОСТЕЙ | 2010 |
|
RU2451939C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО ПРОФИЛЯ ВЕТРА В АТМОСФЕРЕ | 2011 |
|
RU2477490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО ПРОФИЛЯ ВЕТРА В АТМОСФЕРЕ | 2015 |
|
RU2585793C1 |
| CN 108872628 A, 23.11.2018. | |||
